Изобретение относится к реабилитационной робототехнике, а именно к адаптивным мобильным пространственным робототехническим системам, и может быть использовано для восстановительной реабилитации в спортивной и клинической медицине, при проведении лечебно-профилактических процедур в оздоровительных учреждениях различного профиля, а также для проведения автономных массажных манипуляционных воздействий на конечности для отдельных категорий профессий, требующих выполнения функциональных операций в условиях длительного пребывания в фиксированном положении или невесомости, например для летчиков и космонавтов, совершающих длительные беспосадочные полеты в условиях ограниченного пространства.
Известны устройство адаптивного мобильного пространственного робота-манипулятора и способ организации его продольных или винтовых самоперемещений по наружной поверхности элементов колонного или арочного типа и контроля их физико-механических свойств, а также траектории перемещения (Саяпин С.Н, Сипев А.В. Адаптивный мобильный пространственный робот-манипулятор и способ организации движений и контроля физико-механических свойств и геометрической формы контактируемой поверхности и траектории перемещения с его помощью. Патент РФ на изобретение №2424893, МПК B25J 5/00, 13/08. Опубл. в БИ. №20, 2011- прототип). Устройство выполнено в виде пространственной структуры в виде октаэдрного модуля в исходном положении, ребра которого выполнены в виде стержней, концы которых с помощью сферических шарниров соединены в его вершинах. При этом все грани октаэдрного модуля выполнены с возможностью соединения через них с подобными модулями и все стержни октаэдрного модуля снабжены линейными приводами с шарнирными соединениями на концах, выполненных в виде сферических шарниров. При этом срединные участки стержней тыльной грани октаэдрного модуля, расположенной с противоположной стороны от направления движения и параллельной ей фронтальной грани, расположенной со стороны направления движения, снабжены радиальными упорами с датчиками температуры и изолированными друг от друга электрическими контактами с возможностью образования адаптивных схватов, при этом каждый из стержней снабжен датчиками относительного перемещения и относительной скорости, упоры - датчиками силы, а вершины октаэдра - совмещенными датчиками пространственного положения и ускорений, представляющих миниатюрные трехосные блоки гироскопов-акселерометров, при этом линейные приводы, датчики силы, температуры, относительного перемещения и относительной скорости и совмещенные датчики пространственного положения и ускорений электрически связаны через аналого-цифровые преобразователи с системой управления с возможностью оперативного контроля и управления в реальном режиме времени.
Указанное устройство и способ имеют следующие недостатки.
В случае самоперемещения устройства вдоль элемента колонного типа переменного сечения, например вдоль верхней конечности (кисть, предплечье и плечо) или нижней (стопа, голень и бедро), имеют место ограничения, вызванные тем, что минимальные диаметры участков конечностей, охватываемых тыльной и фронтальной гранями, зависят от минимальной длины ребра грани, включающей длину линейного привода, определяемую длиной его корпуса, длинами минимально выступающих концевых элементов линейного привода и расстояний от осей их соединения с вершинами граней до их центров, а также поперечных размеров срединного участка самого линейного привода в месте его контакта с поверхностью. Таким образом, для охвата минимального диаметра участка конечности необходим корпус линейного привода минимальной длины с увеличенными поперечными размерами его срединного участка. Однако в этом случае максимального рабочего хода линейного привода оказывается недостаточно для охвата максимального диаметра той же конечности. В результате возникает необходимость в выполнении линейных приводов тыльной и фронтальной граней с различными длинами, что усложняет конструкцию устройства и делает невозможность ее самоперемещения по всей длине конечности. Кроме того, контакт срединных участков линейных приводов ребер граней осуществляется в точках, что ограничивает манипуляционные возможности проведения массажа конечности.
Радиальные перемещения срединных участков стержней тыльной и фронтальной граней в виде правильных треугольников связаны соотношением между радиусом вписанной окружности (r) и длиной соответствующего ребра грани (I): I=2×30,5r. В результате при проведении массажных манипуляций значения радиальных перемещений срединных участков линейных приводов кратно отличаются от значений их осевых перемещений, что приводит к необходимости увеличения рабочего хода линейного привода и, как следствие, к увеличению габаритно-массовых характеристик тыльной и фронтальной граней.
В случае применения в линейных приводах пневмоцилиндров одностороннего действия, они должны быть снабжены возвратными пружинами и элементами конструкции, исключающими поворот штока относительно цилиндра вокруг их общей продольной оси, например за счет выполнения поперечного сечения штока и сопрягаемого отверстия в цилиндре квадратными, что усложняет конструкцию линейного привода в целом.
Техническим результатом предлагаемых адаптивного мобильного пространственного реабилитационного робота-манипулятора и способа организации движений и диагностики пациента с его помощью является упрощение конструкции, снижение габаритно-массовых характеристик и организация возможности самоперемещения устройства по всей длине конечности, повышение производительности массажиста и on-line контроль автономного массажа, а также расширение манипуляционных возможностей проведения массажа за счет:
- выполнения датчиков силы срединных участков линейных приводов тыльной и фронтальной граней в виде тензометрических упругих элементов, имеющих форму пластины, концы которой жестко соединены с концами линейного привода и установленных на линейном приводе в положении его максимальной длины и с начальным прогибом в сторону центра соответствующей грани;
- выполнения каждой из вершин граней с возможностью установки массажных приспособлений, направленных к центру тыльной и фронтальной граней;
- исключения из устройства прототипа комплекта незадействованных датчиков и элементов конструкции, включающего: радиальные упоры вершин граней с датчиками температуры и изолированными друг от друга электрическими контактами.
Это достигается тем, что в адаптивном мобильном пространственном реабилитационном роботе-манипуляторе, содержащем пространственную структуру в виде октаэдрного модуля в исходном положении, ребра которого выполнены в виде стержней, концы которых шарнирно соединены в вершинах октаэдрного модуля, при этом стержни снабжены линейными приводами с датчиками относительного перемещения, причем стержни выполнены с возможностью изменения их длины по управляющим командам на линейные приводы от системы управления, при этом тыльная грань октаэдрного модуля, расположенная с противоположной стороны от направления движения и параллельная ей фронтальная грань, расположенная со стороны направления движения, выполнены с возможностью соединения через них с подобными модулями и все стержни октаэдрного модуля снабжены шарнирными соединениями на концах, выполненных в виде сферических шарниров, при этом срединные участки стержней тыльной и фронтальной граней снабжены радиальными упорами с датчиками силы и температуры и изолированными друг от друга электрическими контактами с возможностью образования адаптивных схватов робота-манипулятора, при этом каждый из стержней снабжен осевыми датчиками силы, относительного перемещения и относительной скорости, а вершины октаэдра снабжены совмещенными датчиками пространственного положения и ускорений, выполненными в виде миниатюрных трехосных блоков гироскопов-акселерометров, при этом линейные приводы, датчики силы, температуры, относительного перемещения и относительной скорости и совмещенные датчики пространственного положения и ускорений электрически соединены через аналого-цифровые преобразователи с системой управления, выполненной с возможностью оперативного контроля и управления в реальном режиме времени, датчики силы срединных участков линейных приводов тыльной и фронтальной граней выполнены в виде тензометрических упругих элементов, имеющих форму пластины (или круглого стержня), концы которых жестко соединены с концами линейного привода и установленной на линейном приводе в положении его максимальной длины и с начальным прогибом в сторону центра соответствующей грани, а каждая из вершин выполнена с возможностью установки массажных приспособлений, направленных к центру тыльной и фронтальной граней. Причем на круглые стержни надеты подвижные массажные элементы, а каждая из вершин октаэдрного модуля может быть выполнена с возможностью установки ультразвуковых датчиков, направленных к центру тыльной и фронтальной граней.
Это достигается тем, что в способе организации движений и диагностики пациента с помощью адаптивного мобильного пространственного реабилитационного робота-манипулятора, выполненного в виде октаэдрного модуля, включающего его установку на участок воздействия и управление пространственным перемещением вершин октаэдрного модуля путем контроля длин всех стержней и определения пространственных координат вершин относительно базовой системы координат с помощью датчиков относительного перемещения и системы управления и формирования управляющих команд для линейных приводов стержней, при этом управление адаптивным мобильным пространственным реабилитационным роботом-манипулятором осуществляют по одному из следующих режимов или их комбинаций:
- при организации с его помощью манипуляций поглаживания и растирания верхних и нижних конечностей пациента перед установкой реабилитационного робота-манипулятора в систему управления вводят геометрические параметры массируемых участков и связывают их с базовой системой координат, после этого в систему управления вводят координаты участков конечностей, недопустимых для проведения массажа, после этого через фронтальную и тыльную грани устанавливают реабилитационный робот-манипулятор на выбранном начальном участке конечности пациента и уменьшают длины стержней фронтальной и тыльной граней до момента установления контакта тензометрических упругих элементов с поверхностью конечности и производят фиксацию на ней тыльной грани и ее обжатие фронтальной гранью с заданными усилиями, которые определяют по показаниям датчиков силы, после этого линейные приводы отключают и вычисляют координаты вершин граней относительно базовой системы координат, затем согласованно увеличивают длины стержней боковых граней, линейные приводы которых останавливают после увеличения длин стержней до заданных значений, и уменьшают до начального положения, манипуляции поглаживания и растирания повторяют для данного участка заданное количество циклов, при этом в процессе манипуляции поглаживания и растирания изменяют усилие обжатия и угол наклона фронтальной грани относительно тыльной по заданным значениям, которые определяют по показаниям датчиков силы, скорость перемещения фронтальной грани относительно тыльной определяют по показаниям датчиков относительной скорости, а усилие поглаживания и растирания определяют по показаниям осевых датчиков силы линейных приводов боковых граней, и в случае превышения допустимых значений уменьшают усилие обжатия фронтальной грани на величину установленного шага, затем длины стержней фронтальной грани увеличивают до расфиксации с конечностью и согласованным изменением длин линейных приводов боковых граней, производят ее поворот относительно тыльной грани на заданный угол, затем уменьшают длины стержней фронтальной грани до момента установления контакта тензометрических упругих элементов с поверхностью конечности и производят ее обжатие фронтальной гранью с заданными усилиями, которые определяют по показаниям датчиков силы, при этом в процессе и в случае, если конечность отклоняют от требуемого положения, которое определяют с помощью датчиков пространственного положения, через систему управления подают сигнал и отключают работу линейных приводов, после того как конечность устанавливают в требуемое положение, работу линейных приводов возобновляют, после окончания манипуляций поглаживания и растирания на выбранном участке конечности реабилитационный робот-манипулятор самоперемещается на новый заданный участок и алгоритм манипуляций поглаживания и растирания повторяют;
- при организации с его помощью манипуляции продольного и поперечного разминания реабилитационный робот-манипулятор устанавливают на предплечье или голени пациента, при этом тыльную и фронтальную грани размещают в зонах проведения массажа и уменьшают длины их стержней до момента установления контакта тензометрических упругих элементов с поверхностью конечности и производят фиксацию на ней тыльной и фронтальной граней с заданными усилиями, которые определяют по показаниям датчиков силы, после этого линейные приводы отключают и вычисляют координаты вершин граней относительно базовой системы координат, затем выполняют продольное разминание, при котором поочередно для тыльной и фронтальной граней согласованно увеличивают длины их стержней, линейные приводы которых останавливают и манипуляции продольного разминания с помощью тыльной и фронтальной граней повторяют для данных участков заданное количество циклов, при этом в процессе манипуляции продольного разминания изменяют усилие воздействия на массируемые участки конечности пациента по заданным значениям, которые определяют по показаниям датчиков силы, скорость перемещения линейных приводов тыльной и фронтальной граней определяют по показаниям датчиков относительной скорости, а развиваемые в них усилия определяют по показаниям осевых датчиков силы и в случае превышения допустимых значений линейные приводы выключают, уменьшают усилие фиксации данной грани на величину установленного шага, процесс данной манипуляции продолжают и после ее окончания линейные приводы выключают в исходном положении, затем длины стержней фронтальной грани увеличивают до расфиксации с конечностью и согласованным изменением длин линейных приводов боковых граней, производят ее поворот в своей плоскости относительно тыльной грани на заданный угол, затем уменьшают длины стержней фронтальной грани до момента установления контакта тензометрических упругих элементов с поверхностью конечности и производят ее фиксацию с заданными усилиями, которые определяют по показаниям датчиков силы, после этого те же действия повторяют для тыльной грани и алгоритм массажных движений повторяют, после их окончания линейные приводы выключают в исходном положении, затем согласованным изменением длин линейных приводов боковых граней производят поочередные качания фронтальной и тыльной граней относительно их центров в заданных направлениях, после этого линейные приводы выключают в исходном положении, затем согласованным изменением длин линейных приводов боковых граней осуществляют с заданной амплитудой возвратно-поступательные перемещения одной грани относительно другой, при этом изменения длин линейных приводов и скоростей относительного движения граней контролируют соответственно по показаниям датчиков относительного перемещения и относительной скорости, усилия фиксации граней на конечности контролируют по показаниям датчиков силы их линейных приводов, а усилия в боковых стержнях контролируют с помощью осевых датчиков силы, при этом по показаниям осевых датчиков силы и датчиков относительного перемещения боковых стержней, а также датчиков температуры и по электрическому сопротивлению кожи пациента между изолированными контактами и усилию их прижатия судят о физико-механических свойствах кожи пациента, в случае превышения допустимых значений осевых усилий линейные приводы выключают, уменьшают значение амплитуды на величину установленного шага и процесс данной манипуляции продолжают, после окончания манипуляций продольного разминания на начальном участке конечности выполняют поперечное разминание, при котором тыльную и фронтальную грани фиксируют на конечности заданными усилиями, которые определяют по показаниям датчиков силы, затем согласованным изменением длин линейных приводов боковых граней производят поочередные знакопеременные повороты тыльной и фронтальной граней относительно друг друга на заданные углы, которые определяют по показаниям датчиков относительного перемещения линейных приводов и датчиков пространственного положения вершин октаэдрного модуля, и манипуляции поперечного разминания с помощью тыльной и фронтальной граней повторяют для данных участков заданное количество циклов, при этом в процессе манипуляций поперечного разминания изменяют усилие воздействия на массируемые участки конечности пациента по заданным значениям, которые определяют по показаниям датчиков силы, скорость перемещения линейных приводов тыльной и фронтальной граней определяют по показаниям датчиков относительной скорости, а развиваемые в них усилия определяют по показаниям осевых датчиков силы, и в случае превышения допустимых значений линейные приводы выключают и уменьшают усилие фиксации данной грани на величину установленного шага, затем длины стержней фронтальной грани увеличивают до расфиксации с конечностью и согласованным изменением длин линейных приводов боковых граней, производят ее поворот относительно тыльной грани на заданный угол, затем уменьшают длины стержней фронтальной грани до момента установления контакта тензометрических упругих элементов с поверхностью конечности и производят ее фиксацию с заданными усилиями, которые определяют по показаниям датчиков силы, после этого те же действия повторяют для тыльной грани, затем манипуляции поперечного разминания повторяют и после их окончания реабилитационный робот-манипулятор самоперемещается на новый заданный участок и алгоритм манипуляций продольного и поперечного и разминаний повторяют;
- при организации с его помощью мобилизации и манипуляции на локтевом или коленном суставе конечностей одну из граней реабилитационного робота-манипулятора устанавливают на плече или бедре, а другую грань устанавливают на предплечье или голени соответственно, при этом уменьшают длины стержней граней до момента установления контакта тензометрических упругих элементов с поверхностью конечности и производят их фиксацию на соответствующей конечности с заданными усилиями, которые определяют по показаниям датчиков силы, после этого линейные приводы отключают и вычисляют координаты вершин граней относительно базовой системы координат, затем выполняют осевые мобилизационные продольные и поворотные знакопеременные воздействия, при которых согласованно изменяют длины стержней боковых граней, рабочие ходы которых контролируют по показаниям осевых датчиков силы и совмещенных датчиков пространственного положения и ускорений, при этом длины стержней контролируют по показаниям осевых датчиков силы и совмещенных датчиков пространственного положения и ускорений, при этом длины стержней контролируют по показаниям датчиков относительного перемещения, положение конечности контролируют по датчикам пространственного положения, а скорости перемещения граней контролируют по показаниям датчиков относительной скорости;
- при организации с его помощью манипуляций вибрационного воздействия на конечность с помощью реабилитационного робота-манипулятора знакопеременные движения при поглаживании, растирании и разминании организуют с заданными вибрационными значениями частот и амплитуд, которые определяют по показаниям пространственных датчиков ускорений, датчиков относительного перемещения и датчиков относительной скорости, после окончания манипуляций вибрационного воздействия реабилитационный робот-манипулятор самоперемещается на новый заданный участок и алгоритм манипуляций вибрационного воздействия повторяют;
- при организации с его помощью манипуляций принудительного движения предплечья и голени относительно плеча и бедра, головы относительно туловища, а также кисти и стопы относительно предплечья и голени соответственно октаэдрные модули объединяют с образованием общей грани, при этом одну из крайних граней размещают на одной из частей конечности, другую крайнюю грань размещают на смежной части конечности, а общую грань размещают в зоне соединительного сустава конечности, затем по команде от системы управления включают линейные приводы крайних граней и производят уменьшение длин их стержней до момента фиксации на соответствующих частях конечности с заданным усилием, которое контролируют по показаниям датчиков силы и осевых датчиков силы стержней крайних граней, после чего линейные приводы крайних граней выключают, затем организуют заданные принудительные пространственные движения свободной части конечности относительно смежной, при этом согласованно изменяют длины боковых стержней, соединяющих крайние грани с общей и длины стержней общей грани, при этом изменение пространственного положения свободной и смежной частей конечности контролируют по показаниям датчиков пространственного положения и датчиков относительного перемещения, скорости движений контролируют по показаниям датчиков относительной скорости, усилия фиксации и сопротивления движениям контролируют по показаниям датчиков силы и осевых датчиков силы, а возникающие при движении ускорения контролируют по показаниям датчиков пространственных ускорений, при этом в случае превышения заданных значений усилий и ускорений линейные приводы выключают, уменьшают значение рабочих ходов линейных приводов на величину установленного шага и процесс данной манипуляции продолжают, а объединенный реабилитационный робот-манипулятор самоперемещается на новый заданный участок и производят заданный алгоритм манипуляций для соответствующего сустава конечности.
На фиг.1 представлено схематическое изображение октаэдрного модуля ABCDEF адаптивного мобильного пространственного реабилитационного робота-манипулятора. Стрелками показаны направления возможных изменений длин ребер линейных приводов.
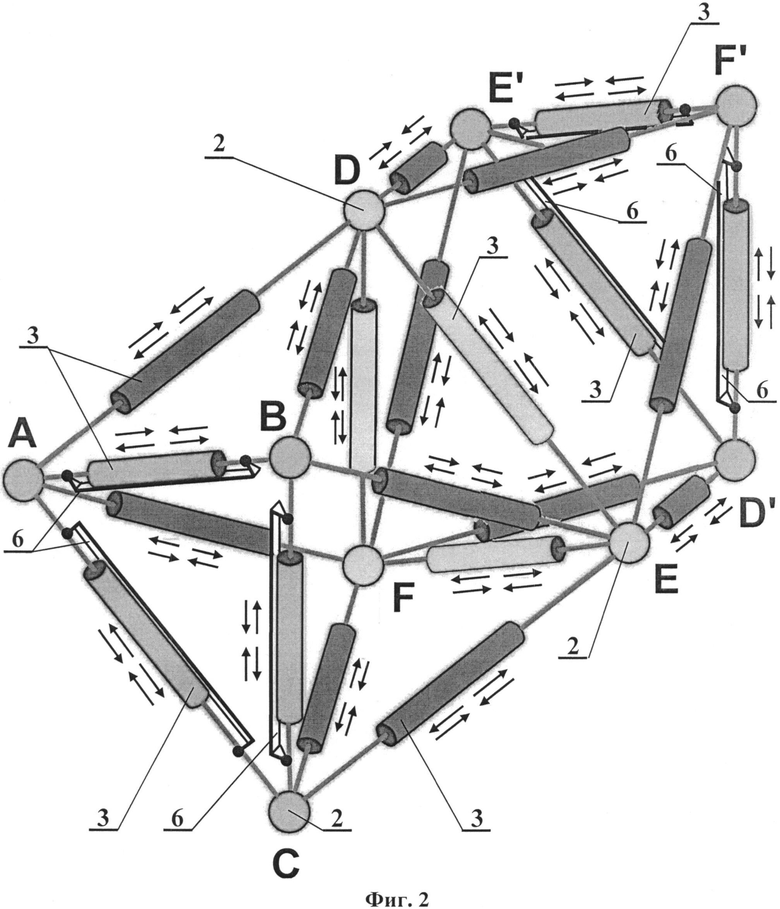
На фиг.2 показан двухмодульный адаптивный мобильный пространственный реабилитационный робот-манипулятор в положении максимальной длины линейных приводов тыльной (ABC) и вновь образованной фронтальной (D′E′F′) граней. Стрелками показаны направления возможных изменений длин линейных приводов.
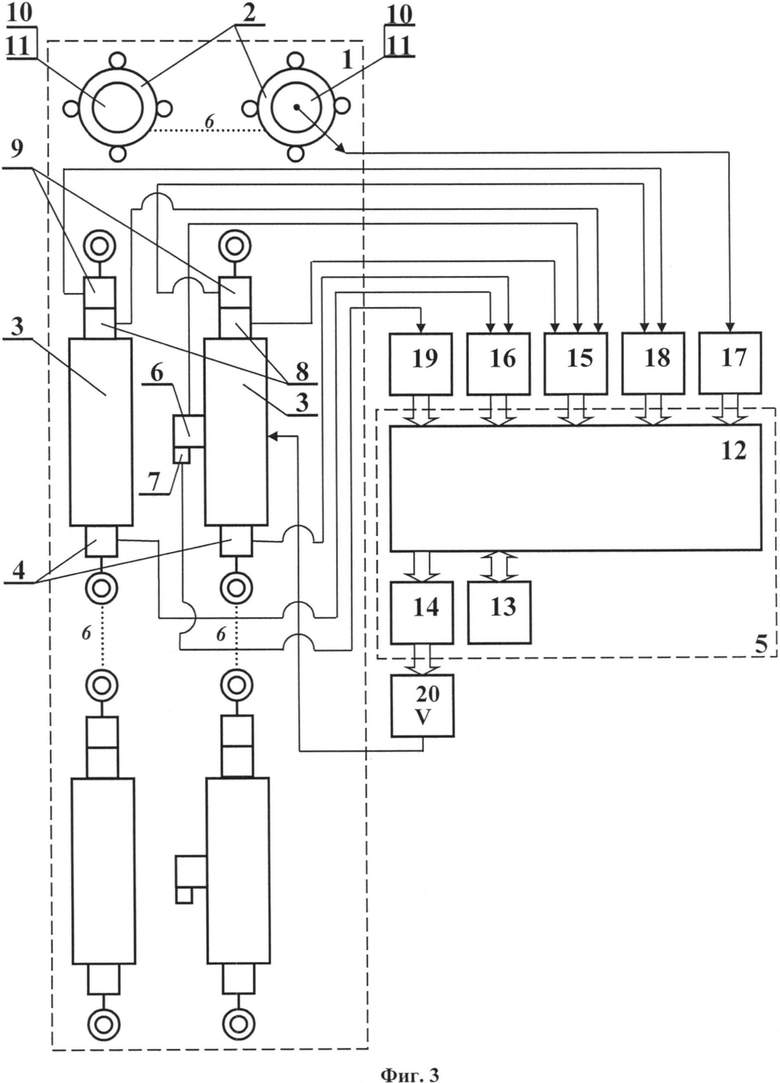
На фиг.3 представлена структурная схема одномодульного адаптивного мобильного пространственного реабилитационного робота-манипулятора.
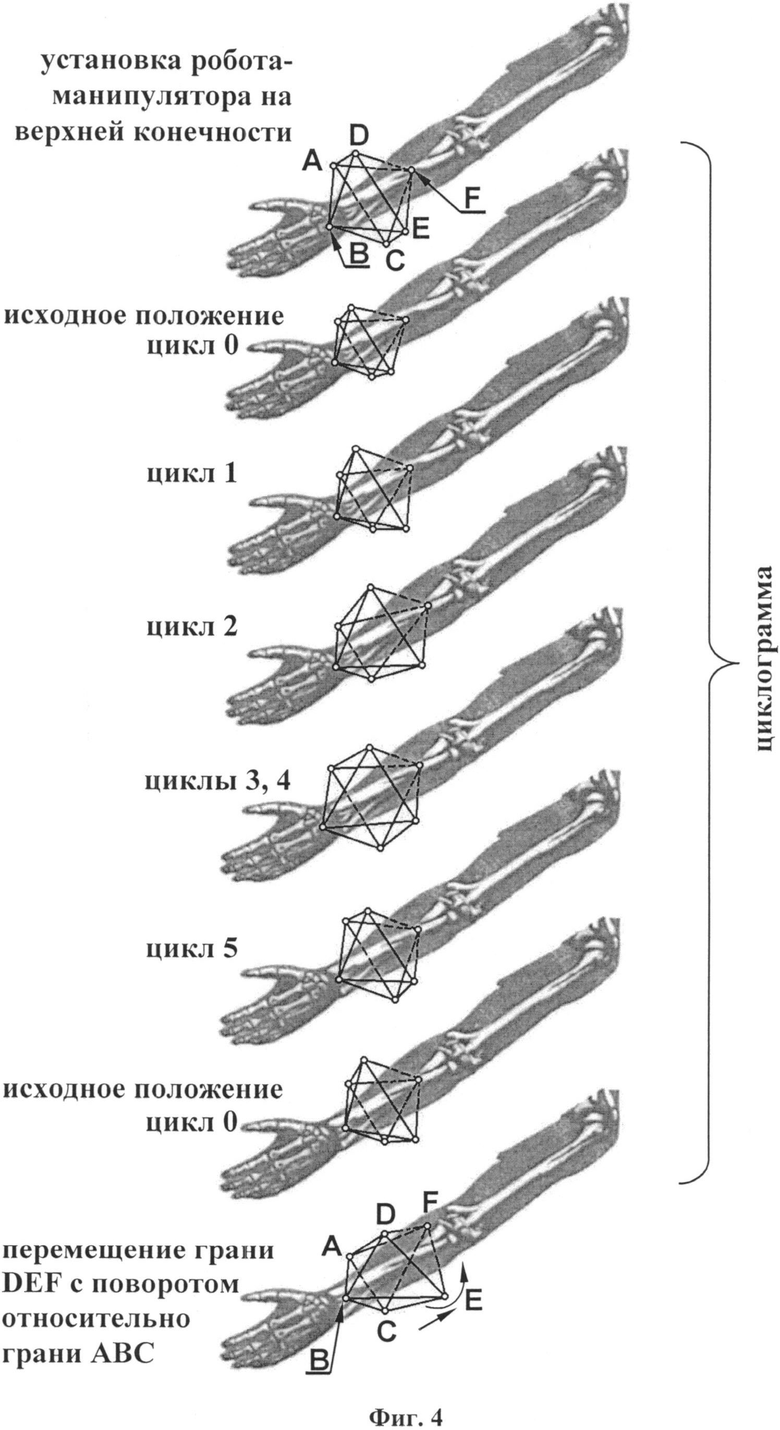
На фиг.4 изображена циклограмма самоперемещения одномодульного адаптивного мобильного пространственного реабилитационного робота-манипулятора по верхней конечности пациента.
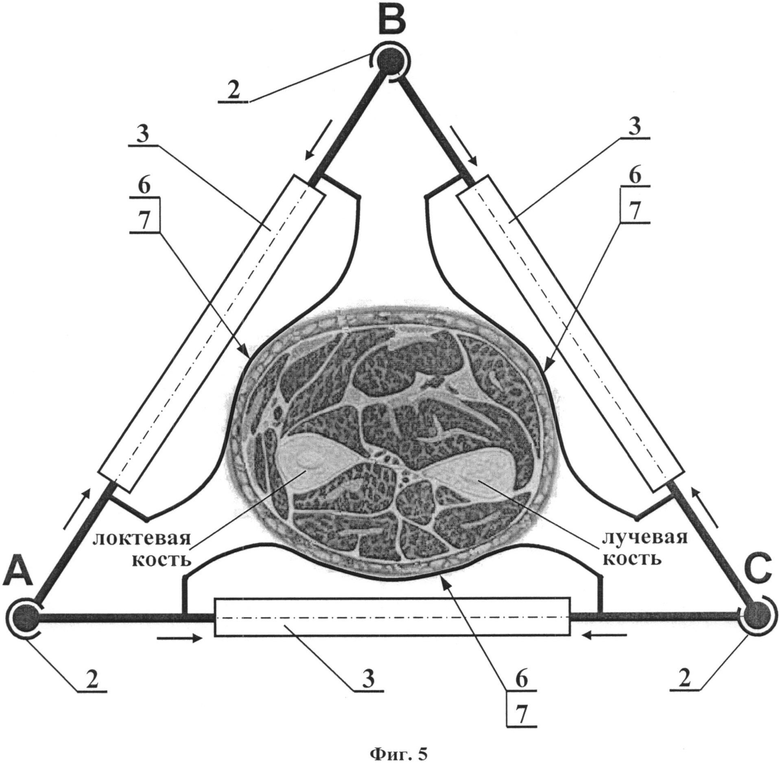
На фиг.5 показано поперечное сечение конечности с зафиксированной на ней тыльной гранью ABC. Стрелками показаны направления изменения длин линейных приводов грани ABC при ее фиксации на конечности.
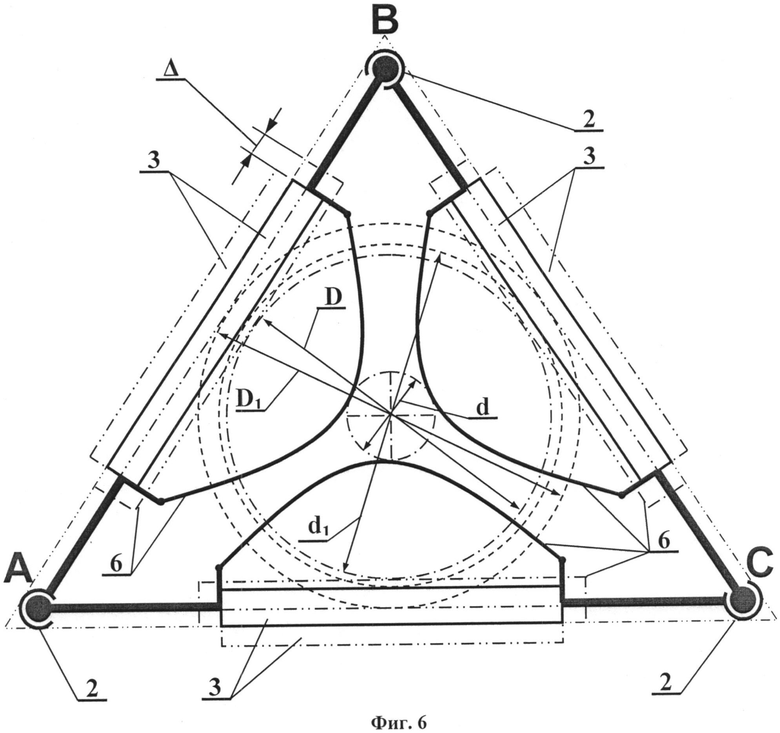
На фиг.6 показана фиксация грани ABC на круглом стержне с помощью радиальных упоров с адаптивными схватами и без них. Штрих с двумя пунктирными линиями показывает крайние положения линейных приводов с радиальными упорами. Пунктирными линиями показаны диаметры охватываемых окружностей в крайних положениях линейных приводов без радиальных упоров, а штрихпунктирными линиями - с радиальными упорами.
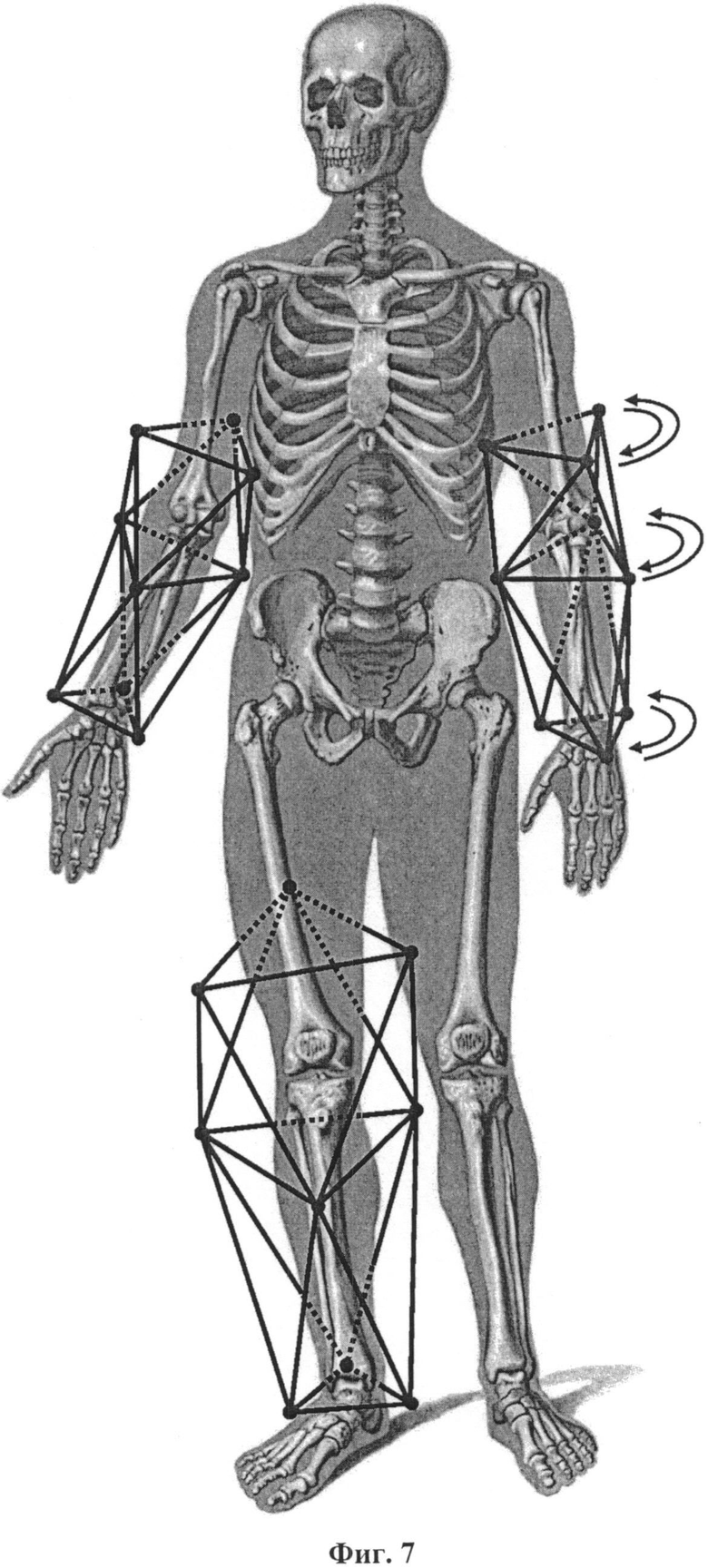
На фиг.7 показана схема установки двухмодульных адаптивных мобильных пространственных реабилитационных роботов-манипуляторов, образующих скелетоны верхних и нижних конечностей пациента.
На фиг.8 показана схема установки одномодульного адаптивного мобильного пространственного реабилитационного робота-манипулятора на верхнюю часть туловища и голову пациента.
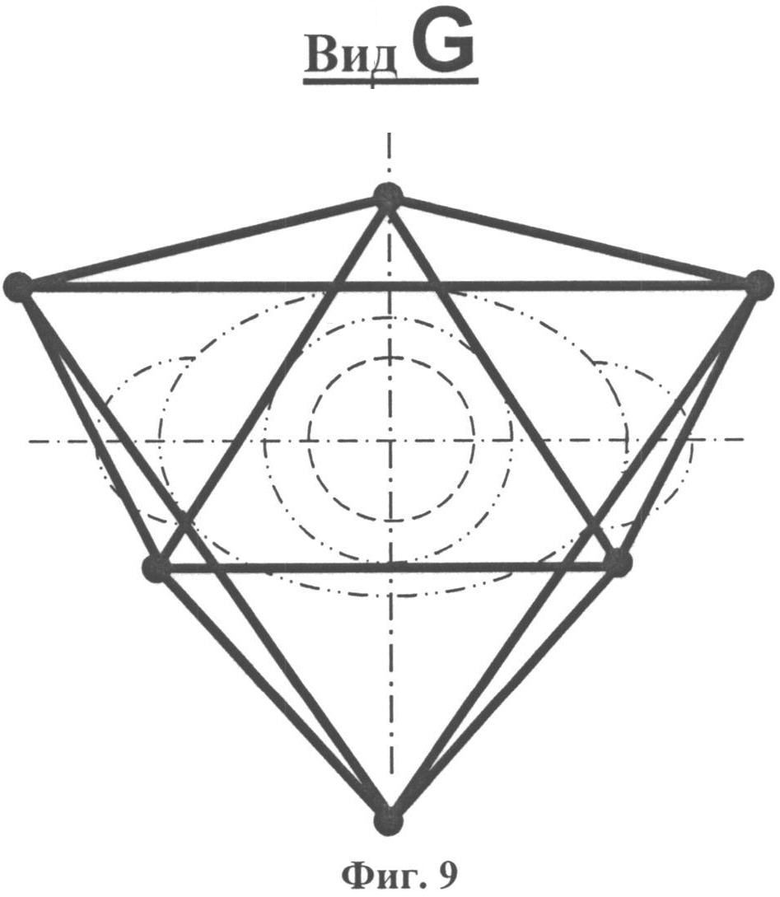
На фиг.9 показан вид по стрелке G на одномодульный адаптивный мобильный пространственный реабилитационный робот-манипулятор, установленный на верхнюю часть туловища и голову пациента. Штрих с двумя пунктирными линиями показывает внешние контуры сечений головы и тела пациента плоскостями верхней и нижней граней робота-манипулятора соответственно.
Адаптивный мобильный пространственный реабилитационный робот-манипулятор выполнен в виде октаэдрного модуля ABCDEF 1 в исходном положении, ребра которого выполнены в виде стержней, концы которых шарнирно соединены в вершинах 2 октаэдрного модуля 1 (фиг. 1). При этом тыльная грань ABC октаэдрного модуля 1 расположена с противоположной стороны от направления его движения, а параллельная ей фронтальная грань DEF расположена со стороны направления движения. Тыльная и фронтальная грани выполнены с возможностью соединения через них с подобными модулями (фиг. 2). Каждый из стержней снабжен линейным приводом 3 с датчиком относительного перемещения 4 и выполнен с возможностью изменения своей длины по управляющим командам на его линейный привод 3 от системы управления (СУ) 5 (фиг. 3). Концы линейных приводов 3 всех стержней октаэдрного модуля 1 соединены с помощью сферических или эквивалентных им шарниров в шести вершинах 2 октаэдрного модуля 1 по четыре в каждой. Срединные участки стержней тыльной и фронтальной граней снабжены радиальными упорами с датчиками силы 6 с возможностью образования адаптивных схватов робота-манипулятора (фиг. 1, 2, 5, 6). При этом радиальные упоры с датчиками силы 6 выполнены в виде тензометрических упругих элементов, имеющих форму пластины или круглого стержня, концы которых жестко соединены с концами линейного приводы 3. При необходимости на круглый стержень могут быть надеты подвижные массажные элементы (на фиг. условно не показаны).
Каждый из радиальных упоров с датчиком силы 6 установлен на линейном приводе 3 в положении его максимальной длины (фиг. 1, 2). На контактных поверхностях радиальных упоров с датчиками силы 6 установлены датчики температуры 7 и изолированные друг от друга электрические контакты (на фиг. условно не показаны).
Линейные приводы 3 всех стержней октаэдрного модуля 1 снабжены осевыми датчиками силы 8, датчиками относительного перемещения 4 и относительной скорости 9. Вершины 2 октаэдрного модуля 1 снабжены совмещенными датчиками пространственного положения 10 и ускорений 11, которые выполнены в виде миниатюрных трехосных блоков гироскопов-акселерометров и служат для оперативного контроля пространственного положения каждой из вершин 2 и виброускорений вдоль каждой из осей стержней с линейными приводами 3.
Каждая из вершин 2 выполнена с возможностью установки массажных приспособлений и ультразвуковых датчиков (на фиг. условно не показаны), направленных к центру тыльной и фронтальной граней, исполнительных органов в виде линейных приводов 3 (Саяпин С.Н, Синев А.В. Адаптивный мобильный пространственный робот-манипулятор и способ организации движений и контроля физико-механических свойств и геометрической формы контактируемой поверхности и траектории перемещения с его помощью. Патент РФ на изобретение №2424893. Опубл. в БИ №20, 2011).
СУ 5 включает нейрокомпьютер 12, программно-алгоритмическое обеспечение 13 и цифроаналоговые преобразователи (ЦАП) 14. Входы СУ 5 через шины данных аналого-цифровых преобразователей (АЦП) подключены соответственно к выходам АЦП 15 датчиков силы 6 и 8, АЦП 16 датчиков относительного перемещения 4, АЦП 17 совмещенных датчиков пространственного положения и ускорений 10 и 11; АЦП 18 датчиков относительной скорости 9; АЦП 19 датчиков температуры 7, а выходы СУ 5 через шины выходных данных подключены к соответствующим входам программно-алгоритмического обеспечения 13 и последовательно соединенных цифроаналоговых преобразователей (ЦАП) 14, усилителей мощности 20 и исполнительных органов (линейных приводов 3). При этом СУ 5 и система энергопитания (на фиг. условно не показана) могут быть выполнены как автономного, так и дистанционного исполнения.
Адаптивный мобильный пространственный реабилитационный робот-манипулятор, выполненный в виде октаэдрного модуля 1 (в исходном положении), работает следующим образом.
Октаэдрный модуль 1 является базовым элементом при построении двухмодульных адаптивных мобильных пространственных реабилитационных роботов-манипуляторов и более. Для этого тыльная (ABC) и фронтальная (DEF) грани октаэдрного модуля 1 (фиг.1) выполнены с возможностью соединения через них с подобными модулями с образованием общих граней (фиг.2). При этом у стержней стыкуемой грани базового октаэдрного модуля ABCDEF 1, например фронтальной DEF, удаляют радиальные упоры с датчиками силы 6, температуры 7 и электрическими контактами (на фиг. условно не показаны), а у присоединяемого октаэдрного модуля A′B′C′D′E′F′ отсоединяют стыкуемую грань, например тыльную А′В′С. В результате образуется двухмодульный адаптивный мобильный пространственный реабилитационный робот-манипулятор с тыльной гранью ABC, фронтальной гранью D′E′F′ и общей гранью DEF посредине (фиг.2). При этом отсоединенная грань присоединяемого октаэдрного модуля представляет собой треугольник, образованный из шарнирно связанных в вершинах 2 стержней с линейными приводами 3.
Срединные участки стержней с линейными приводами 3 тыльной и фронтальной граней снабжены радиальными упорами с датчиками силы 6, взаимодействующими с наружной контактируемой поверхностью кожи, и служат соответственно для передачи сжимающих усилий от срединных участков стержней к наружной поверхности кожи. Оперативный контроль передаваемых усилий в местах контакта радиальных упоров с датчиками силы 6 с наружной поверхностью кожи осуществляют с помощью датчиков силы 6 и осевых датчиков силы 8. В местах контакта радиальных упоров с датчиками силы 6 с наружной поверхностью кожи установлены также датчики температуры 7, позволяющие осуществлять контроль температуры на поверхности кожи в соответствующих точках, и изолированные друг от друга электрические контакты (на фиг. условно не показаны), позволяющие измерять электрическое сопротивление и разность потенциалов между точками контакта.
Октаэдрный модуль 1 устанавливают на верхней или нижней конечности, например на предплечье пациента в области запястья, и осуществляют необходимые перемещения и массажные манипуляции в зависимости от поставленных задач. При этом с помощью линейных приводов 3 и системы управления 5 осуществляют согласованные изменения длин ребер октаэдрного модуля. В результате происходят заданные пространственные перемещения вершин 2 относительно базовой системы координат. Управление исполнительными органами октаэдрного модуля 1 (линейными приводами 3) осуществляется по управляющим командам от системы управления 5, которые формируются по показаниям датчиков силы 6, 8, относительного перемещения 4 и относительной скорости 9, совмещенных датчиков пространственного положения и ускорений 10, 11. При этом сигналы от датчиков поступают на входы АЦП 15, 16, 18 и 17 соответственно и через шину данных в нейрокомпьютер 12 системы управления 5. После обработки в реальном масштабе времени данных с использованием соответствующего программно-алгоритмического обеспечения 13 формируют управляющие команды, которые через ЦАП 14 и усилители мощности 20 поступают на исполнительные органы (линейные приводы 3) и октаэдрный модуль 1 изменяет свою геометрическую форму (трансформируется).
Способ организации движений и диагностики пациента с помощью адаптивного мобильного пространственного реабилитационного робота-манипулятора реализуется следующим образом. Управление адаптивным мобильным пространственным реабилитационным роботом-манипулятором осуществляется согласованным изменением длин стержней (ребер октаэдрного модуля ABCDEF 1), обеспечивающих необходимое перемещение в пространстве вершин 2 октаэдрного модуля 1. При этом по показаниям датчиков относительного перемещения 4 линейных приводов 3, выполненных, например, в пространственных угловых перемещениях вершин 2. Геометрическая неизменяемость октаэдрного модуля 1 позволяет определять пространственные координаты вершин 2 по измеренным длинам всех стержней и управлять их перемещениями аналогично организации пространственных перемещений 1-координатного манипулятора (Колискор А.Ш. Разработка и исследование промышленных роботов на основе 1-координат // Станки и инструмент, 1982. №12. С.21-24). А показания датчиков пространственного положения 10 позволяют повысить точность данных измерений с учетом погрешностей, вызванных тем, что в каждой из вершин 2 шарнирно соединяются концы четырех стержней при помощи сферических или эквивалентных им шарниров, которые конструктивно не могут иметь общего центра вращения.
В каждом из приведенных выше режимов способ реализуется следующим образом.
- 1-ый режим - организация манипуляций поглаживания и растирания верхних или нижних конечностей пациента. Рассмотрим реализацию режима на примере манипуляционных воздействий на верхнюю конечность пациента (фиг.4, 5). В медицинской практике манипуляция поглаживания является наиболее часто используемым массажным приемом, который заключается в скольжении руки (рук) по коже, не сдвигая ее в складки с различной степенью надавливания (Дубровский В.И., Дубровская А.В. Лечебный массаж. М.: «ГЭОТАР-МЕД», 2004 г. - 512 с., с. 50-53; Васичкин В.И. Все о массаже. - М.:АСТ-ПРЕСС, 1998. - 368 с., с. 33-42). Манипуляция растирания состоит в смещении, передвижении, растяжении тканей в различных направлениях. При растирании массирующая рука никогда не скользит по коже, а смещает ее, производя сдвигание и растяжение в различных направлениях. В отличие от поглаживания растирание оказывает более глубокое воздействие на ткани и его осуществляют по ходу крово- и лимфотока (там же). Перед установкой октаэдрного модуля 1 адаптивного мобильного пространственного реабилитационного робота-манипулятора на верхнюю конечность пациента в систему управления 5 вводят геометрические параметры массируемых участков и связывают их с базовой системой координат. После этого в систему управления 5 вводят координаты участков верхней конечности, недопустимых для проведения массажа. Затем на выбранном начальном участке верхней конечности, например в области запястья, через фронтальную DEF и тыльную ABC грани устанавливают октаэдрный модуль 1 (фиг.4, цикл 0), линейные приводы 3 стержней АВ, ВС, СА, DE, EF и FD включают на обратный ход и уменьшают длины фронтальной и тыльной граней до момента установления контакта тензометрических упругих элементов 6 с поверхностью конечности и производят фиксацию на ней тыльной грани ABC (фиг.5) и обжатие предплечья фронтальной гранью DEF с заданными для поглаживания или растирания усилиями, которые определяют по показаниям датчиков силы 6 и 8. Как видно из фиг.6, благодаря выполнению радиальных упоров 6 в виде пластины достигается возможность значительных радиальных перемещений их срединных участков при малых перемещениях линейных приводов 3. Благодаря этому новому качеству одни и те же фронтальная DEF и тыльная ABC грани способны обжимать и фиксировать предметы произвольной формы и существенно отличаются поперечными размерами, например, охватываемые (обжимаемые) поперечные размеры предплечья в области запястья (фиг.4, 5) и плеча в области бицепса (фиг.4). После этого линейные приводы 3 отключают и вычисляют координаты вершин граней относительно базовой системы координат и начинают манипуляции поглаживания и растирания. При этом длины стержней AD, AF, BD, BE, СЕ, CF боковых граней согласованно увеличивают до заданных значений, а затем соответствующие линейные приводы 3 переключают на реверс и длины данных стержней уменьшают до заданных значений. Организованный режим манипуляции поглаживания и растирания повторяют для данного участка конечности заданное количество циклов. При этом в процессе манипуляции поглаживания и растирания изменяют усилие обжатия и угол наклона фронтальной грани относительно тыльной по заданным значениям, которые определяют по показаниям датчиков силы 6 и 8, датчиков относительного перемещения 4 и пространственного положения 10, скорость перемещения фронтальной грани относительно тыльной определяют по показаниям датчиков относительной скорости 9, а усилие поглаживания и растирания определяют по показаниям осевых датчиков силы 8 линейных приводов 3 стержней AD, AF, BD, BE, СЕ, CF боковых граней ABD, ACF, ADF, BDE, ВСЕ, CEF, и в случае превышения допустимых значений уменьшают усилие обжатия фронтальной грани DEF на величину установленного шага. Затем длины стержней фронтальной грани DEF увеличивают до расфиксации с конечностью и согласованным изменением длин линейных приводов 3 стержней AD, AF, BD, BE, СЕ, CF боковых граней, производят ее поворот относительно тыльной грани ABC на заданный угол. После этого уменьшают длины стержней фронтальной грани DEF до момента установления контакта тензометрических упругих элементов 6 с поверхностью верхней конечности и производят ее обжатие фронтальной гранью DEF с заданными усилиями, которые определяют по показаниям датчиков силы 6 и 8. При этом в случае, если конечность отклоняют от требуемого положения, которое определяют с помощью датчиков пространственного положения 10, через систему управления 5 подают сигнал и отключают работу линейных приводов 3, после того как конечность устанавливают в требуемое положение, работу линейных приводов 3 возобновляют. После окончания манипуляций поглаживания и растирания на выбранном участке конечности реабилитационный робот-манипулятор самоперемещается на новый заданный участок путем попеременного перемещения фронтальной DEF и тыльной граней ABC относительно друг друга и относительно конечности. При этом по команде от СУ 5 включаются линейные приводы 3 фронтальной грани DEF на прямой ход и производят увеличение длин их стержней до момента расфиксации радиальных упоров с датчиками силы 6 с поверхностью конечности и установления требуемого зазора между ними, который определяется по показаниям датчиков силы 6 и 8, относительного перемещения 4, пространственного положения 10 и разрывов электрических контактов радиальных упоров с кожей конечности (на фиг. условно не показаны), и линейные приводы 3 фронтальной грани DEF отключают (фиг.4, цикл 1). Затем по по команде от СУ 5 начинается согласованное увеличение длин стержней AD, AF, BD, BE, СЕ, CF боковых граней ABD, ACF, ADF, BDE, ВСЕ, CEF, линейные приводы 3 которых останавливаются по команде от СУ 5 после увеличения длин стержней до заданных значений (фиг.4, цикл 2), определяемых по показаниям датчиков относительного перемещения 4 и пространственного положения 10. Затем по команде от СУ 5 производится уменьшение длин стержней фронтальной грани DEF до момента установления контакта и ее фиксации на данном участке конечности с заданным усилием, которое определяют по показаниям датчиков силы 6 и 8. После этого линейные приводы 3 останавливаются и производятся вычисления пространственных координат вершин 2 по показаниям датчиков относительного перемещения 4 и пространственного положения 10 (фиг.4, цикл 3). Затем по команде от СУ 5 производится увеличение длин стержней тыльной грани ABC и после расфиксации ее радиальных упоров с датчиками силы 6 с поверхностью конечности и установления требуемого зазора между ними, который определяется по показаниям датчиков силы 6 и 8, относительного перемещения 4, пространственного положения 10 и разрывов электрических контактов радиальных упоров с кожей конечности (на фиг. условно не показаны) по команде от СУ 5 производится остановка линейных приводов 3 стержней тыльной грани ABC (фиг.4, цикл 4) и начинается согласованное уменьшение длин стержней AD, AF, BD, BE, СЕ, CF боковых граней ABD, ACF, ADF, BDE, ВСЕ, линейные приводы 3 которых останавливаются по команде от СУ 5 после уменьшения длин стержней до заданных значений (фиг.4, цикл 5), определяемых по показаниям датчиков относительного перемещения 4 и пространственного положения 10. Далее по команде от СУ 5 уменьшаются длины стержней тыльной грани ABC до момента установления контакта и ее фиксации на данном участке конечности с заданным усилием, которое определяют по показаниям датчиков силы 6 и 8. После этого линейные приводы 3 останавливаются и производятся вычисления пространственных координат вершин 2 по показаниям датчиков относительного перемещения 4 и пространственного положения 10 (фиг.4, цикл 0 на новом участке). После этого линейные приводы 3 тыльной грани ABC останавливаются и производятся вычисления пространственных координат вершин 2 по показаниям датчиков относительного перемещения 4 и пространственного положения 10 (фиг. 4, цикл 0 на новом участке). После этого линейные приводы 3 тыльной грани ABC останавливаются и производятся вычисления пространственных координат вершин 2 по показаниям датчиков относительного перемещения 4 и пространственного положения 10 (фиг. 4, а, исходное положение). Далее алгоритм манипуляций поглаживания и растирания конечности и перемещения октаэдрного модуля 1 на новый участок повторяют. Траектория перемещения вершин 2 граней по поверхности конечности может быть задана прямолинейной, винтовой или комбинированной, при этом запоминаются пространственные координаты вершин 2 граней относительно базовой системы координат и время моментов их фиксации с поверхностью конечности и по их значениям судят о траектории движения октаэдрного модуля в процессе проведения массажа. При необходимости, в процессе проведения массажа измеряют температуру поверхности в местах контакта радиальных упоров 6 с конечностью с помощью датчиков температуры 7, а также электрическое сопротивление кожи между участками контакта;
- 2-ой режим - организация манипуляций продольного и поперечного разминания верхних или нижних конечностей пациента. Рассмотрим реализацию режима также на примере манипуляционных воздействий на верхнюю конечность пациента (фиг. 4, 5). Манипуляция разминания «…заключается в непрерывистом или прерывистом захватывании, сдавливании, отжимании, сдвигании, «перетирании» тканей (мышц)». Различают продольное и поперечное разминание (Дубровский В.И., Дубровская А.В. Лечебный массаж. М.: «ГЭОТАР-МЕД», 2004 г. - 512 с., с. 56-62; Васичкин В.И. Все о массаже. - М.: АСТ-ПРЕСС, 1998. - 368 с., с. 33-42). При организации манипуляции продольного и поперечного разминания октаэдрный модуль 1 (подобно алгоритму режима 1) устанавливают на верхней конечности, например на предплечье пациента (фиг. 4, 5), при этом тыльную ABC и фронтальную DEF грани размещают в зонах проведения массажа и уменьшают длины их стержней до момента установления контакта радиальных упоров с датчиками силы 6 с поверхностью конечности и производят фиксацию на ней тыльной и фронтальной граней с заданными усилиями, которые определяют по показаниям датчиков силы 6 и 8, после этого линейные приводы 3 отключают и вычисляют координаты вершин 2 граней относительно базовой системы координат, затем выполняют продольное разминание, при котором поочередно для тыльной и фронтальной граней согласованно увеличивают длины их стержней, линейные приводы 3 которых останавливают после достижения заданных усилий. При этом эти усилия определяют по показаниям датчиков силы 6 и 8. Затем длины стержней тыльной и фронтальной граней уменьшают до начального положения и манипуляции продольного значениям, которые определяют по показаниям датчиков силы 6 и 8, скорость перемещения линейных приводов 3 тыльной и фронтальной граней определяют по показаниям датчиков относительной скорости 9, а развиваемые в них усилия определяют по показаниям осевых датчиков силы 8, и в случае превышения допустимых значений линейные приводы 3 выключают, уменьшают усилие фиксации данной грани на величину установленного шага и процесс данной манипуляции продолжают, после ее окончания линейные приводы 3 выключают в исходном положении. Затем длины стержней фронтальной грани увеличивают до расфиксации с конечностью и согласованным изменением длин линейных приводов 3 боковых граней ABD, ACF, ADF, BDE, ВСЕ, производят ее поворот в своей плоскости относительно тыльной грани на заданный угол. После этого уменьшают длины стержней фронтальной грани до момента установления контакта радиальных упоров с датчиками силы 6 с поверхностью конечности и производят ее фиксацию с заданными усилиями, которые определяют по показаниям датчиков силы, после этого те же действия повторяют для тыльной грани и алгоритм массажных движений повторяют. После их окончания линейные приводы 3 выключают в исходном положении. Затем согласованным изменением длин линейных приводов 3 боковых граней производят поочередные качания фронтальной DEF и тыльной ABC граней относительно их центров в заданных направлениях. После этого линейные приводы 3 выключают в исходном положении. Затем согласованным изменением длин линейных приводов 3 боковых граней осуществляют с заданной амплитудой возвратно-поступательные перемещения одной грани относительно другой. При этом изменения длин линейных приводов 3 и скоростей относительного движения граней контролируют соответственно по показаниям датчиков относительного перемещения 4 и относительной скорости 9, усилия фиксации граней на конечности контролируют по показаниям датчиков силы 6 их линейных приводов 3, а усилия в боковых стержнях контролируют с помощью осевых датчиков силы 8. При этом по показаниям осевых датчиков силы 8 и датчиков относительного перемещения 4 боковых стержней, а также датчиков температуры 7 и электрическому сопротивлению кожи пациента между изолированными контактами и усилию их прижатия судят о физико-механических свойствах кожи пациента. В случае превышения допустимых значений осевых усилий линейные приводы 3 выключают, уменьшают значение амплитуды на величину установленного шага и процесс данной манипуляции продолжают. После окончания манипуляций продольного разминания на начальном участке конечности выполняют поперечное разминание, при котором тыльную ABC и фронтальную DEF грани фиксируют на конечности заданными усилиями, которые определяют по показаниям датчиков силы 6, затем согласованным изменением длин линейных приводов 3 боковых граней производят поочередные знакопеременные повороты тыльной и фронтальной граней относительно друг друга на заданные углы, которые определяют по показаниям датчиков относительного перемещения 4 линейных приводов 3 и датчиков пространственного положения 10 вершин 2 октаэдрного модуля 1, и манипуляции поперечного разминания с помощью тыльной и фронтальной граней повторяют для данных участков заданное количество циклов. При этом в процессе манипуляций поперечного разминания изменяют усилие воздействия на массируемые участки конечности пациента по заданным значениям, которые определяют по показаниям датчиков силы 6, скорость перемещения линейных приводов тыльной и фронтальной граней определяют по показаниям датчиков относительной скорости 9, а развиваемые в них усилия определяют по показаниям осевых датчиков силы 8, и в случае превышения допустимых значений линейные приводы 3 выключают и уменьшают усилие фиксации данной грани на величину установленного шага, затем длины стержней фронтальной грани DEF увеличивают до расфиксации с конечностью и согласованным изменением длин линейных приводов 3 боковых граней, производят ее поворот относительно тыльной грани ABC на заданный угол. Затем уменьшают длины стержней фронтальной грани DEF до момента установления контакта радиальных упоров с датчиками силы 6 с поверхностью конечности и производят ее фиксацию с заданными усилиями, которые определяют по показаниям датчиков силы 6, после этого те же действия повторяют для тыльной грани ABC. Затем манипуляции поперечного разминания повторяют и после их окончания, октаэдрный модуль 1 самоперемещается на новый заданный участок и алгоритм манипуляций продольного и поперечного и разминаний повторяют;
- 3-й режим - организация мобилизации и манипуляции на локтевом или коленном суставе конечностей (на фиг. условно не показана). Мобилизация представляет собой пассивные ритмично повторяемые движения (т.е. движения, выполняемые массажистом без участия пациента) в суставах в пределах их физиологического объема. В связи с этим перед мобилизацией необходимо, чтобы пациент совершил активное (самостоятельное) движение в суставе для установления пределов возможного движения при мобилизации. Постепенно амплитуда воздействия при мобилизации увеличивается. При этом в момент восстановления недостающего объема движения в суставе следует увеличивать усилие надавливания на прессуемую точку до 5-10 кг. При этом в процессе проведения мобилизации прессуемая точка должна постоянно фиксироваться разноименной рукой. Дозировка, количество раз и амплитуда воздействия увеличивается постепенно от процедуры к процедуре. Мобилизация является подготовкой к манипуляции, и если ее проводить терпеливо и продолжительное время, то она может заменить манипуляцию, которая связана с кратковременным форсированным движением в суставе с целью доведения соотношения элементов сустава до предела анатомических возможностей. При этом к манипуляции приступают после проведения массажа и мобилизации (Дубровский В.И., Дубровская А.В. Лечебный массаж. М: «ГЭОТАР-МЕД», 2004 г. - 512 с., с. 392-401; Васичкин В.И. Все о массаже. - М.: АСТ-ПРЕСС, 1998. - 368 с., с. 52-55). При организации с помощью октаэдрного модуля 1 адаптивного мобильного пространственного реабилитационного робота-манипулятора процедур мобилизации и манипуляции на локтевом или коленном суставе конечностей одну из его граней устанавливают на плече или бедре, а другую грань устанавливают на предплечье или голени соответственно, при этом через СУ 5 включают линейные приводы 3 фронтальной DEF и тыльной ABC граней на обратный ход и уменьшают длины их стержней до момента установления контакта радиальных упоров с датчиками силы 6 с поверхностью конечности и производят их фиксацию на соответствующей конечности с заданными усилиями, которые определяют по показаниям датчиков силы 6 и 8. После этого линейные приводы 3 выключают и по показаниям датчиков относительного перемещения 4 и пространственного положения 10 вычисляют координаты вершин 2 фронтальной и тыльной граней относительно базовой системы координат. Затем выполняют осевые мобилизационные продольные и поворотные знакопеременные воздействия, при которых согласованно изменяют длины стержней AD, AF, BD, BE, СЕ, CF боковых граней ABD, ACF, ADF, BDE, ВСЕ, рабочие ходы которых контролируют по показаниям осевых датчиков силы 8 и совмещенных датчиков пространственного положения 10 и ускорений 11. При этом длины стержней AD, AF, BD, BE, СЕ, CF контролируют по показаниям датчиков относительного перемещения 4, положение конечности контролируют по датчикам пространственного положения 10, а скорости перемещения граней контролируют по показаниям датчиков относительной скорости 9 и пространственных ускорений 11. Данный режим может быть также применен для организации мобилизации и манипуляции головы, а также для ее фиксации относительно туловища при повреждении шейных позвонков (фиг.8 и 9);
- 4-ый режим - организация манипуляций вибрационного воздействия на конечность с помощью октаэдрного модуля 1 адаптивного мобильного пространственного реабилитационного робота-манипулятора. Здесь приведенные выше алгоритмы знакопеременных движений при поглаживании, растирании и разминании конечностей организуют с заданными вибрационными значениями частот, амплитуд и усилий, которые определяют по показаниям датчиков пространственного положения 10 и ускорений 11, датчиков силы 6 и 8, датчиков относительного перемещения 4 и датчиков относительной скорости 9, после окончания манипуляций вибрационного воздействия адаптивный мобильный пространственный реабилитационный робот-манипулятор самоперемещается на новый заданный участок и алгоритм манипуляций вибрационного воздействия повторяют;
- 5-ый режим - организация манипуляций принудительного движения свободной части конечности относительно смежной (разновидность пассивных движений при мобилизации и манипуляций, приведенных в режиме 4), например предплечья и голени относительно плеча и бедра, а также кисти и стопы относительно предплечья и голени соответственно. Для обеспечения данного режима два октаэдрных модуля 1 объединяют в спаренный модуль с образованием общей грани, при этом одну из крайних граней размещают на одной из частей конечности, другую крайнюю грань размещают на смежной части конечности, а общую грань размещают в зоне соединительного сустава конечности (фиг. 7). Затем по команде от СУ 5 включают линейные приводы 3 крайних граней и производят уменьшение длин их стержней до момента фиксации на соответствующих частях конечности с заданным усилием, которое контролируют по показаниям датчиков силы 6 и осевых датчиков силы 8 стержней крайних граней. После этого по команде от СУ 5 линейные приводы 3 крайних граней выключают и по показаниям датчиков относительного перемещения 4 и пространственного положения 10 вычисляют координаты всех вершин 2 спаренного модуля относительно базовой системы координат. Затем по установленной в СУ 5 массажной программе организуют заданные принудительные (пассивные) пространственные движения свободной части конечности относительно смежной. При этом согласованно изменяют длины боковых стержней, соединяющих крайние грани с общей и длины стержней общей грани. При этом изменение пространственного положения свободной и смежной частей конечности контролируют по показаниям датчиков пространственного положения 10 и датчиков относительного перемещения 4 всех вершин 2 и линейных приводов 3 спаренного модуля, скорости и ускорения движений контролируют по показаниям датчиков относительной скорости 9, усилия фиксации и сопротивления движениям контролируют по показаниям датчиков силы 6 и осевых датчиков силы 8, а возникающие при движении ускорения контролируют по показаниям датчиков пространственных ускорений 11. При этом в случае превышения заданных значений усилий и ускорений линейные приводы 3 по команде от СУ 5 выключают, уменьшают значение рабочих ходов линейных приводов 3 на величину установленного шага и процесс данной манипуляции продолжают, а в случае недопустимого пространственного положения конечности линейные приводы 3 выключают и подают сигнал пациенту и массажисту, после окончания манипуляций объединенный реабилитационный робот-манипулятор самоперемещается на новый заданный участок и производят заданный алгоритм манипуляций для соответствующего сустава конечности.
Во всех режимах при необходимости осуществляется контроль температуры конечности и электрического сопротивления кожи. Также во время процедуры пациент имеет возможность отключить устройство, о чем СУ 5 незамедлительно подаст сигнал массажисту. При этом все произведенные массажные действия регистрируются в СУ 5 для последующего анализа и назначения последующих процедур.
В режимах 3 и 5 по показаниям осевых датчиков силы 8 линейных приводов 3 можно судить о силах сопротивления сустава при организации его пассивных движений и диагностировать степень его подвижности (разработанности). Также имеется возможность с помощью датчиков температуры 7 непрерывно измерять температуру конечности в местах контакта и по ее значениям судить о степени ее разогрева при проведении массажных процедур, например при растирании. Измерение в процессе массажа электрического сопротивления между участками контакта радиальных упоров с конечностью при измеряемых расстояниях между ними и температурами позволяет судить о сухости кожи и индивидуальной переносимости массажа и уточнять более благоприятные для пациента режимы воздействий. Применение в составе СУ 5 нейрокомпьютера 12 с соответствующим программно-алгоритмическим обеспечением 13 позволяет организовать работу в приведенных режимах в масштабе реального времени.
Приведенные адаптивный мобильный пространственный реабилитационный робот-манипулятор и способ организации движений и диагностики пациента с его помощью могут быть реализованы на базе имеющихся на сегодняшний день разработок и функционирующих устройств. Так, известен «Адаптивный мобильный пространственный робот-манипулятор и способ организации движений и контроля физико-механических свойств и геометрической формы контактируемой поверхности и траектории перемещения с его помощью» (Патент РФ на изобретение №2424893. МПК B25J 5/00, 13/08. Опубл. в БИ №20, 2011). В описании патента представлены сведения о возможностях организации различных операций с помощью адаптивного мобильного пространственного робота-манипулятора, выполненного на основе октаэдрного модуля.
Сведения о возможности реализации совмещенных датчиков пространственного положения и ускорений, представляющих миниатюрные трехосные блоки гироскопов-акселерометров, выполненных, например, в виде микромеханических вибрационных гироскопов-акселерометров, представлены в описании патента РФ №2064682 «Микромеханический вибрационный гироскоп-акселерометр», МПК G01P 15/-97, Опубл. в БИ, №21, 1996. Приводы. В качестве приведенных в описании устройства датчиков силы, относительной скорости, относительного перемещения, температуры, а также шарнирных соединений линейных приводов с вершинами октаэдрного модуля могут быть применены типовые датчики и узлы, широко известные в машиностроении и робототехнике.
Предлагаемое изобретение может быть использовано для восстановительной реабилитации в спортивной и клинической медицине, при проведении лечебно-профилактических процедур в оздоровительных учреждениях различного профиля, а также для проведения автономных массажных манипуляционных воздействий на конечности для отдельных категорий профессий, требующих выполнения функциональных операций в условиях длительного пребывания в фиксированном положении или невесомости, например для летчиков и космонавтов, совершающих длительные беспосадочные полеты в условиях ограниченного пространства. Также предлагаемое изобретение может быть использовано в домашних условиях для проведения квалифицированного автономного программного самомассажа. При этом при подключении системы управления 5 к сети Интернет может быть организована on-line связь устройства и пациента с массажистом для оперативного контроля за проведением массажа и принятия решений при возникновении нештатных ситуаций, например передать команду в СУ 5 на остановку устройства и оперативный вызов медпомощи пациенту на дом. В результате у пациентов, находящихся в домашних условиях и не имеющих возможности самостоятельного посещения лечебного учреждения появляется возможность проведения массажа под on-line контролем массажиста без его физического присутствия в помещении с пациентом.
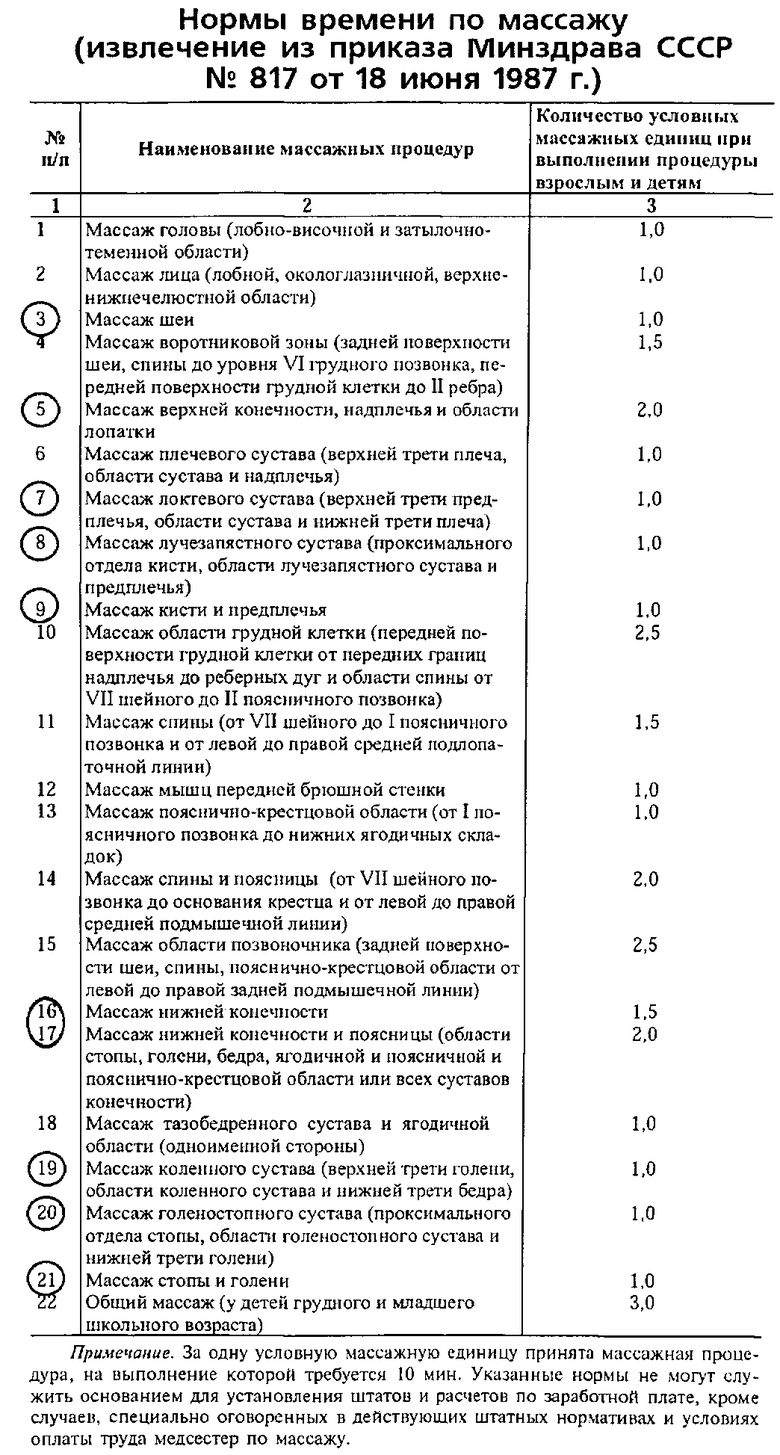
Использование данного изобретения позволит автоматизировать процесс проведения массажа верхних и нижних конечностей, а также шейного участка пациента и за счет этого увеличить количество одновременно обслуживаемых пациентов одним массажистом и снизить его физическую усталость и утомляемость. В качестве примера, для оценки трудоемкости массажных процедур, в таблице ниже приведены установленные действующие нормы времени по массажу (Дубровский В.И., Дубровская А.В. Лечебный массаж. М.: «ГЭОТАР-МЕД», 2004 г. - 512 с., с. 469-470. Приложение 6.
Увеличение количества одновременно обслуживаемых пациентов одним массажистом и способность обеспечения организации массажа на дому без посещения массажиста способствует массовой доступности различных категорий населения к получению необходимых массажных процедур, что является одной из существенных социально значимых отличительных черт предлагаемого изобретения.

Изобретение относится к реабилитационной робототехнике, а именно к адаптивным мобильным пространственным робототехническим системам, и может быть использовано для восстановительной реабилитации в спортивной и клинической медицине, при проведении лечебно-профилактических процедур в оздоровительных учреждениях различного профиля, а также для проведения автономных массажных манипуляционных воздействий на конечности для отдельных категорий профессий, требующих выполнения функциональных операций в условиях длительного пребывания в фиксированном положении или невесомости, например для летчиков и космонавтов, совершающих длительные беспосадочные полеты в условиях ограниченного пространства. Адаптивный мобильный пространственный реабилитационный робот-манипулятор содержит пространственную структуру в виде октаэдрного модуля в исходном положении с ребрами в виде стержней, концы которых шарнирно соединены в вершинах октаэдрного модуля. Стержни снабжены линейными приводами с датчиками относительного перемещения, причем стержни выполнены с возможностью изменения их длины по управляющим командам на линейные приводы от системы управления. Тыльная грань октаэдрного модуля, расположенная с противоположной стороны от направления движения, и параллельная ей фронтальная грань, расположенная со стороны направления движения, выполнены с возможностью соединения через них с подобными модулями. Все стержни октаэдрного модуля снабжены шарнирными соединениями на концах, выполненных в виде сферических шарниров, при этом срединные участки стержней тыльной и фронтальной граней снабжены радиальными упорами с датчиками силы и температуры и изолированными друг от друга электрическими контактами с возможностью образования адаптивных схватов робота-манипулятора. Каждый из стержней снабжен осевыми датчиками силы, относительного перемещения и относительной скорости, а вершины октаэдра снабжены совмещенными датчиками пространственного положения и ускорений, выполненными в виде миниатюрных трехосных блоков гироскопов-акселерометров. Линейные приводы, датчики силы, температуры, относительного перемещения и относительной скорости и совмещенные датчики пространственного положения и ускорений электрически соединены через аналого-цифровые преобразователи с системой управления, выполненной с возможностью оперативного контроля и управления в реальном режиме времени. Датчики силы срединных участков линейных приводов тыльной и фронтальной граней выполнены в виде тензометрических упругих элементов, имеющих форму пластины или круглого стержня, концы которых жестко соединены с концами линейного привода и установленной на линейном приводе в положении его максимальной длины и с начальным прогибом в сторону центра соответствующей грани, а каждая из вершин выполнена с возможностью установки массажных приспособлений, направленных к центру тыльной и фронтальной граней. Изобретение направлено на упрощение конструкции, снижение габаритно-массовых характеристик и организацию возможности самоперемещения устройства по всей длине конечности, повышение производительности массажиста и возможность on-line контроля по сети Интернет за проведением автономного массажа в домашних условиях, а также расширение манипуляционных возможностей. 2 н. и 6 з.п. ф-лы, 9 ил., 1 табл.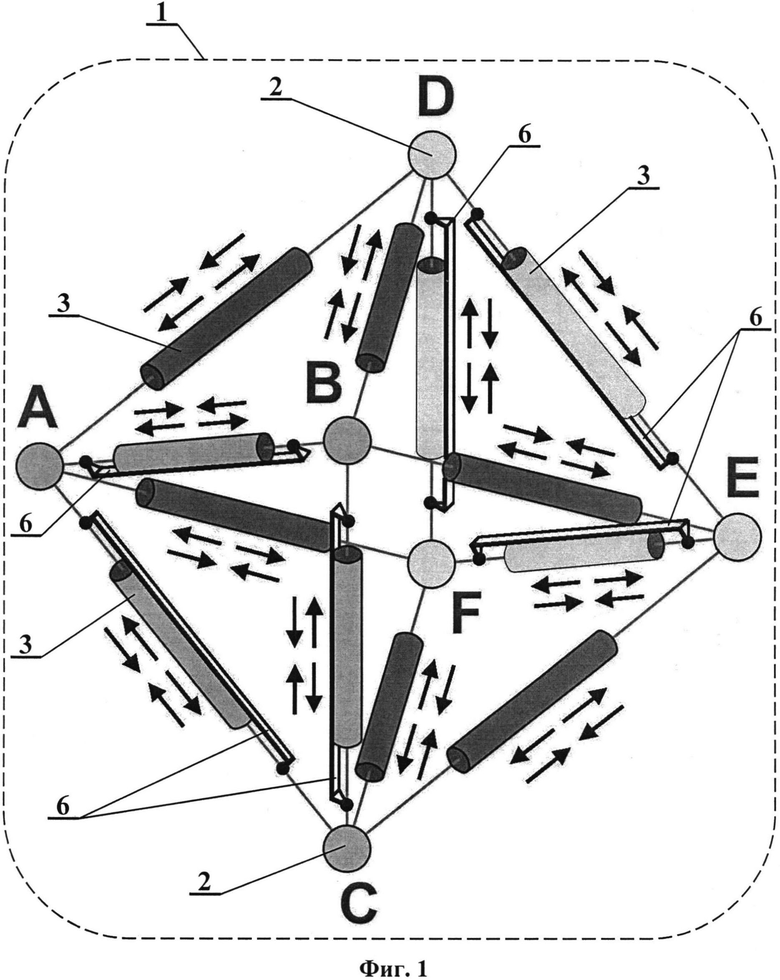
1. Адаптивный мобильный пространственный реабилитационный робот-манипулятор, содержащий пространственную структуру в виде октаэдрного модуля в исходном положении, ребра которого выполнены в виде стержней, концы которых шарнирно соединены в вершинах октаэдрного модуля, при этом стержни снабжены линейными приводами с датчиками относительного перемещения, причем стержни выполнены с возможностью изменения их длины по управляющим командам на линейные приводы от системы управления, при этом тыльная грань октаэдрного модуля, расположенная с противоположной стороны от направления движения, и параллельная ей фронтальная грань, расположенная со стороны направления движения, выполнены с возможностью соединения через них с подобными модулями, и все стержни октаэдрного модуля снабжены шарнирными соединениями на концах, выполненных в виде сферических шарниров, при этом срединные участки стержней тыльной и фронтальной граней снабжены радиальными упорами с датчиками силы и температуры и изолированными друг от друга электрическими контактами с возможностью образования адаптивных схватов робота-манипулятора, при этом каждый из стержней снабжен осевыми датчиками силы, относительного перемещения и относительной скорости, а вершины октаэдра снабжены совмещенными датчиками пространственного положения и ускорений, выполненными в виде миниатюрных трехосных блоков гироскопов-акселерометров, при этом линейные приводы, датчики силы, температуры, относительного перемещения и относительной скорости и совмещенные датчики пространственного положения и ускорений электрически соединены через аналого-цифровые преобразователи с системой управления, выполненной с возможностью оперативного контроля и управления в реальном режиме времени, отличающийся тем, что датчики силы срединных участков линейных приводов тыльной и фронтальной граней выполнены в виде тензометрических упругих элементов, имеющих форму пластины или круглого стержня, концы которых жестко соединены с концами линейного привода и установленной на линейном приводе в положении его максимальной длины и с начальным прогибом в сторону центра соответствующей грани, а каждая из вершин выполнена с возможностью установки массажных приспособлений, направленных к центру тыльной и фронтальной граней.
2. Адаптивный мобильный пространственный реабилитационный робот-манипулятор по п. 1, отличающийся тем, что на круглые стержни надеты подвижные массажные элементы.
3. Адаптивный мобильный пространственный реабилитационный робот-манипулятор по п. 1, отличающийся тем, что каждая из вершин октаэдрного модуля выполнена с возможностью установки ультразвуковых датчиков, направленных к центру тыльной и фронтальной граней.
4. Способ эксплуатации адаптивного мобильного пространственного реабилитационного робота-манипулятора, выполненного по любому из пп. 1-3, включающий его установку на участок воздействия и управление пространственным перемещением вершин октаэдрного модуля путем контроля длин всех стержней и определения пространственных координат вершин относительно базовой системы координат с помощью датчиков относительного перемещения и системы управления и формирования управляющих команд для линейных приводов стержней, отличающийся тем, что для манипуляций поглаживания и растирания верхних и нижних конечностей пациента перед установкой реабилитационного робота-манипулятора в систему управления вводят геометрические параметры массируемых участков и связывают их с базовой системой координат, после этого в систему управления вводят координаты участков конечностей, недопустимых для проведения массажа, после этого через фронтальную и тыльную грани устанавливают реабилитационный робот-манипулятор на выбранном начальном участке конечности пациента и уменьшают длины стержней фронтальной и тыльной граней до момента установления контакта тензометрических упругих элементов с поверхностью конечности и производят фиксацию на ней тыльной грани и ее обжатие фронтальной гранью с заданными усилиями, которые определяют по показаниям датчиков силы, после этого линейные приводы отключают и вычисляют координаты вершин граней относительно базовой системы координат, затем согласованно увеличивают длины стержней боковых граней, линейные приводы которых останавливают после увеличения длин стержней до заданных значений и уменьшают до начального положения, манипуляции поглаживания и растирания повторяют для данного участка заданное количество циклов, при этом в процессе манипуляции поглаживания и растирания изменяют усилие обжатия и угол наклона фронтальной грани относительно тыльной по заданным значениям, которые определяют по показаниям датчиков силы, скорость перемещения фронтальной грани относительно тыльной определяют по показаниям датчиков относительной скорости, а усилие поглаживания и растирания определяют по показаниям осевых датчиков силы линейных приводов боковых граней, и в случае превышения допустимых значений уменьшают усилие обжатия фронтальной грани на величину установленного шага, затем длины стержней фронтальной грани увеличивают до расфиксации с конечностью и согласованным изменением длин линейных приводов боковых граней, производят ее поворот относительно тыльной грани на заданный угол, затем уменьшают длины стержней фронтальной грани до момента установления контакта тензометрических упругих элементов с поверхностью конечности и производят ее обжатие фронтальной гранью с заданными усилиями, которые определяют по показаниям датчиков силы, при этом в процессе и в случае, если конечность отклоняют от требуемого положения, которое определяют с помощью датчиков пространственного положения, через систему управления подают сигнал и отключают работу линейных приводов, после того как конечность устанавливают в требуемое положение, работу линейных приводов возобновляют, после окончания манипуляций поглаживания и растирания на выбранном участке конечности, реабилитационный робот-манипулятор самоперемещается на новый заданный участок и алгоритм манипуляций поглаживания и растирания повторяют.
5. Способ по п. 4, отличающийся тем, что для манипуляции продольного и поперечного разминания реабилитационный робот-манипулятор устанавливают на предплечье или голень пациента, при этом тыльную и фронтальную грани размещают в зонах проведения массажа и уменьшают длины их стержней до момента установления контакта тензометрических упругих элементов с поверхностью конечности и производят фиксацию на ней тыльной и фронтальной граней с заданными усилиями, которые определяют по показаниям датчиков силы, после этого линейные приводы отключают и вычисляют координаты вершин граней относительно базовой системы координат, затем выполняют продольное разминание, при котором поочередно для тыльной и фронтальной граней согласованно увеличивают длины их стержней, линейные приводы которых останавливают после достижения заданных усилий, которые определяют по показаниям датчиков силы, затем длины стержней тыльной и фронтальной граней уменьшают до начального положения и манипуляции продольного разминания с помощью тыльной и фронтальной граней повторяют для данных участков заданное количество циклов, при этом в процессе манипуляции продольного разминания изменяют усилие воздействия на массируемые участки конечности пациента по заданным значениям, которые определяют по показаниям датчиков силы, скорость перемещения линейных приводов тыльной и фронтальной граней определяют по показаниям датчиков относительной скорости, а развиваемые в них усилия определяют по показаниям осевых датчиков силы, и в случае превышения допустимых значений линейные приводы выключают, уменьшают усилие фиксации данной грани на величину установленного шага и процесс данной манипуляции продолжают, после ее окончания линейные приводы выключают в исходном положении, затем длины стержней фронтальной грани увеличивают до расфиксации с конечностью и согласованным изменением длин линейных приводов боковых граней, производят ее поворот в своей плоскости относительно тыльной грани на заданный угол, затем уменьшают длины стержней фронтальной грани до момента установления контакта тензометрических упругих элементов с поверхностью конечности и производят ее фиксацию с заданными усилиями, которые определяют по показаниям датчиков силы, после этого те же действия повторяют для тыльной грани и алгоритм массажных движений повторяют, после их окончания линейные приводы выключают в исходном положении, затем согласованным изменением длин линейных приводов боковых граней производят поочередные качания фронтальной и тыльной граней относительно их центров в заданных направлениях, после этого линейные приводы выключают в исходном положении, затем согласованным изменением длин линейных приводов боковых граней осуществляют с заданной амплитудой возвратно-поступательные перемещения одной грани относительно другой, при этом изменения длин линейных приводов и скоростей относительного движения граней контролируют соответственно по показаниям датчиков относительного перемещения и относительной скорости, усилия фиксации граней на конечности контролируют по показаниям датчиков силы их линейных приводов, а усилия в боковых стержнях контролируют с помощью осевых датчиков силы, при этом по показаниям осевых датчиков силы и датчиков относительного перемещения боковых стержней, а также датчиков температуры и электрическому сопротивлению кожи пациента между изолированными контактами и усилию их прижатия судят о физико-механических свойствах кожи пациента, в случае превышения допустимых значений осевых усилий, линейные приводы выключают, уменьшают значение амплитуды на величину установленного шага и процесс данной манипуляции продолжают, после окончания манипуляций продольного разминания на начальном участке конечности выполняют поперечное разминание, при котором тыльную и фронтальную грани фиксируют на конечности заданными усилиями, которые определяют по показаниям датчиков силы, затем согласованным изменением длин линейных приводов боковых граней производят поочередные знакопеременные повороты тыльной и фронтальной граней относительно друг друга на заданные углы, которые определяют по показаниям датчиков относительного перемещения линейных приводов и датчиков пространственного положения вершин октаэдрного модуля, и манипуляции поперечного разминания с помощью тыльной и фронтальной граней повторяют для данных участков заданное количество циклов, при этом в процессе манипуляций поперечного разминания изменяют усилие воздействия на массируемые участки конечности пациента по заданным значениям, которые определяют по показаниям датчиков силы, скорость перемещения линейных приводов тыльной и фронтальной граней определяют по показаниям датчиков относительной скорости, а развиваемые в них усилия определяют по показаниям осевых датчиков силы, и в случае превышения допустимых значений линейные приводы выключают и уменьшают усилие фиксации данной грани на величину установленного шага, затем длины стержней фронтальной грани увеличивают до расфиксации с конечностью и согласованным изменением длин линейных приводов боковых граней, производят ее поворот относительно тыльной грани на заданный угол, затем уменьшают длины стержней фронтальной грани до момента установления контакта тензометрических упругих элементов с поверхностью конечности и производят ее фиксацию с заданными усилиями, которые определяют по показаниям датчиков силы, после этого те же действия повторяют для тыльной грани, затем манипуляции поперечного разминания повторяют, после их окончания реабилитационный робот-манипулятор самоперемещается на новый заданный участок и алгоритм манипуляций продольного и поперечного и разминаний повторяют.
6. Способ по п. 4, отличающийся тем, что для мобилизации и манипуляции на локтевом или коленном суставе конечностей одну из граней реабилитационного робота-манипулятора устанавливают на плече или бедре, а другую грань устанавливают на предплечье или голени соответственно, при этом уменьшают длины стержней граней до момента установления контакта тензометрических упругих элементов с поверхностью конечности и производят их фиксацию на соответствующей конечности с заданными усилиями, которые определяют по показаниям датчиков силы, после этого линейные приводы отключают и вычисляют координаты вершин граней относительно базовой системы координат, затем выполняют осевые мобилизационные продольные и поворотные знакопеременные воздействия, при которых согласованно изменяют длины стержней боковых граней, рабочие ходы которых контролируют по показаниям осевых датчиков силы и совмещенных датчиков пространственного положения и ускорений, при этом длины стержней контролируют по показаниям датчиков относительного перемещения, положение конечности контролируют по датчикам пространственного положения, а скорости перемещения граней контролируют по показаниям датчиков относительной скорости.
7. Способ по п. 4, отличающийся тем, что для организации манипуляций вибрационного воздействия на конечность с помощью реабилитационного робота-манипулятора знакопеременные движения при поглаживании, растирании и разминании организуют с заданными вибрационными значениями частот и амплитуд, которые определяют по показаниям пространственных датчиков ускорений, датчиков относительного перемещения и датчиков относительной скорости, после окончания манипуляций вибрационного воздействия реабилитационный робот-манипулятор самоперемещается на новый заданный участок и алгоритм манипуляций вибрационного воздействия повторяют.
8. Способ по п. 4, отличающийся тем, что для организации манипуляций принудительного движения предплечья и голени относительно плеча и бедра, головы относительно туловища, а также кисти и стопы относительно предплечья и голени соответственно октаэдрные модули объединяют с образованием общей грани, при этом одну из крайних граней размещают на одной из частей конечности, другую крайнюю грань размещают на смежной части конечности, а общую грань размещают в зоне соединительного сустава конечности, затем по команде от системы управления включают линейные приводы крайних граней и производят уменьшение длин их стержней до момента фиксации на соответствующих частях конечности с заданным усилием, которое контролируют по показаниям датчиков силы и осевых датчиков силы стержней крайних граней, после чего линейные приводы крайних граней выключают, затем организуют заданные принудительные пространственные движения свободной части конечности относительно смежной, при этом согласованно изменяют длины боковых стержней, соединяющих крайние грани с общей, и длины стержней общей грани, при этом изменение пространственного положения свободной и смежной частей конечности контролируют по показаниям датчиков пространственного положения и датчиков относительного перемещения, скорости движений контролируют по показаниям датчиков относительной скорости, усилия фиксации и сопротивления движениям контролируют по показаниям датчиков силы и осевых датчиков силы, а возникающие при движении ускорения контролируют по показаниям датчиков пространственных ускорений, при этом в случае превышения заданных значений усилий и ускорений линейные приводы выключают, уменьшают значение рабочих ходов линейных приводов на величину установленного шага и процесс данной манипуляции продолжают, а в случае недопустимого пространственного положения конечности линейные приводы выключают и подают сигнал пациенту и массажисту, после окончания манипуляций объединенный реабилитационный робот-манипулятор самоперемещается на новый заданный участок и производит заданный алгоритм манипуляций для соответствующего сустава конечности.
| СПОСОБ МАССАЖА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2145833C1 |
| KR 20120066157 A, 22.06.2012 | |||
| CN 102247264 A, 23.11.2011 | |||
| РОБОТИЧЕСКАЯ СИСТЕМА ДЛЯ МИНИ-ИНВАЗИВНОЙ ХИРУРГИИ | 2012 |
|
RU2491161C1 |
| US 4721100 A, 26.01.1988 | |||
| US 4412535 A, 01.11.1983 | |||

