Изобретение относится к тяговым электромеханическим приводам наземных транспортных средств и может быть использовано, главным образом, в электромобилях.
Многообразие известных схем, конструкций и компоновочных решений тяговых приводов электромобилей укладывается в рамки трех основных вариантов:
- центральный электродвигатель плюс редуктор плюс межколесный механический дифференциал (подварианты с задним, передним и разнесенным их расположением);
- два бортовых электродвигателя, по одному на каждое ведущее колесо (подварианты с задним и передним расположением);
- электромотор-колеса (подварианты с двумя и четырьмя мотор-колесами).
Наиболее распространены и считаются перспективными электромобили с приводом по первому варианту, в том числе с комбинированными силовыми установками (FR N 2200800 A, B 60 K 17/00, 1974; US N 3888325 A, B 60 K 1/00, 1975).
Второй вариант привода реализован, в частности, в электромобиле Impact, разработанном концерном General Motors (Автомобильная промышленность США, 1990, N 5. - С.7-9). В нем два электродвигателя переднего расположения определяют завышенные габаритно-массовые и стоимостные показатели. В то же время, несомненным достоинством этого привода следует признать использование перспективных асинхронных электродвигателей (по 42,5 кВт каждый) с регулируемым инвертором в составе системы управления приводом.
Как и в автомобилях с ДВС, в электромобилях, в составе их приводов предусмотрены механические дифференциалы, конструкции которых разнообразны и делятся на две большие группы - неблокирующиеся и блокирующиеся дифференциалы. Последние позволяют исключить пробуксовку при потере сцепления одного из колес с грунтом, но имеют спектр собственных недостатков (SU N 697360 A, B 60 K 17/20, 1979).
Один из лучших современных электромобилей, - ВАЗ 1111Э на базе "Оки", - имеет привод, включающий в себя поперечно расположенный центральный тяговый электродвигатель (постоянного тока, независимого возбуждения, 12 кВт), связанный с полуосями колес через редуктор ("главную передачу") в виде пары цилиндрических зубчатых колес и конический дифференциал. При этом ось ведомого зубчатого колеса редуктора (и дифференциала) параллельна оси электродвигателя.
Близким аналогом заявленного устройства по назначению и совокупности конструктивных признаков является привод электромобиля Peugeot 106 Electric (Франция), содержащий систему управления и центральный тяговый электродвигатель с ротором и неподвижным однопакетным статором (Журнал "5 колесо", 1995,N 10(38). - С.7).
В нем электродвигатель постоянного тока с независимым возбуждением, мощностью 20 кВт. Ротор закреплен на полом валу. В полости коаксиально установлен другой вал. Один свободный конец вала снабжен конической солнечной шестерней. Смежный конец вала ротора соединен с водилом конического дифференциала, в состав которого входит и упомянутая коническая солнечная шестерня, другой конец вала соединен с полуосью колеса электромобиля. Вал второй конической солнечной шестерни соединен с полуосью колеса электромобиля. Вал второй конической солнечной шестерни соединен с полуосью другого колеса электромобиля. Таким образом, электродвигатель и механический дифференциал образуют тяговый агрегат, установленный в электромобиле поперечно с образованием асимметричной компоновки. Устройство компактнее предыдущего аналога.
Однако всем известным схемам и конструкциям приводов электромобилей с центральным электродвигателем и дифференциалом с его сложностью и значительной стоимостью свойственна недостаточно высокая проходимость на скользкой дороге (как, впрочем, и любого автомобиля с неблокирующимся дифференциалом любой известной конструкции). Это объясняется свойством дифференциала обеспечивать практически равные моменты на ведущих колесах. Если, например, правое колесо, оказавшись на обледенелом участке дороги, начинает буксовать из-за недостаточного сцепления с ним, т.е. не развивает тяговую силу, то не развивает тяговую силу и левое колесо. При этом левое колесо находится на твердом грунте в условиях хорошего сцепления. Эту картину можно наблюдать достаточно часто в зимнее время.
Введение блокирующихся дифференциалов, упомянутых в обзоре аналогов, еще в большей степени увеличивает массу, габариты, стоимость, трудоемкость регламентных и ремонтных работ, вероятность отказов в работе и, следовательно, ухудшает безопасность эксплуатации электромобиля.
Наиболее близким к заявленному устройству и принятым за прототип является привод электромобиля, содержащий систему управления и центральный тяговый электродвигатель с двумя роторами, соосно установленными в расточке неподвижного однопакетного статора с возможностью вращения друг относительно друга на оппозитных валах, внешние концы которых соединены с редукторами (JP 5-276719 A, 22.10.1993).
В примере выполнения известного устройства (фиг.4 описания прототипа) редукторы выполнены в виде ременных передач.
Привод с таким электродвигателем позволяет исключить механический дифференциал, т.к. сам электродвигатель способен выполнять параллельно и его функции. При этом повышается проходимость на скользкой дороге (бездорожье).
Однако в устройстве-прототипе лишь частично использованы возможности улучшения габаритно-массовых и стоимостных показателей, снижения трудоемкости обслуживания и ремонта.
Задачей, на решение которой направлено заявленное изобретение, является улучшение технико-эксплуатационных и экономических характеристик электромобилей и др. транспортных средств с электротягой путем улучшения габаритно-массовых и стоимостных показателей, снижения трудоемкости обслуживания и ремонта.
Решение указанной задачи обеспечивается тем, что в приводе электромобиля, содержащем систему управления и центральный тяговый электродвигатель с двумя роторами, соосно установленными в расточке неподвижного однопакетного статора с возможностью вращения друг относительно друга на оппозитных валах, внешние концы которых соединены с редукторами, система управления, по меньшей мере, частично расположена в П-образной нише между электродвигателем и редукторами, при этом электродвигатель, редуктор и система управления совместно образуют агрегат.
Задача решается также за счет дополнительных отличительных конструктивных признаков, а именно тем, что электродвигатель при этом выполнен трехфазным асинхронным, а система управления включает в себя преобразователь частоты питания электродвигателя.
На чертеже показана схема привода электромобиля.
Привод электромобиля содержит центральный тяговый электродвигатель 1, связанный через редукторы 2 с полуосями 3, 4 колес 5, 6 электромобиля, и систему управления 7. В состав электродвигателя 1 входят два ротора 8, 9 с короткозамкнутыми обмотками. Роторы 8, 9 установлены в расточке статора 10 соосно и с воздушным зазором, т.е. аксиально разнесены. При этом они полностью охвачены общим неподвижным однопакетным статором 10, преимущественно с единой обмоткой. "Единство" обмотки статора 10 предполагает единообразие фазной обмотки на всей длине статора, т.е. обеспечение по всей длине статора 10 вращающегося поля одного следования. Конструкция роторов 8, 9 и зазор между ними допускают относительное их вращение на индивидуальных валах 11 и 12 соответственно в подшипниковых узлах 13, 14, 15 на общей неподвижной оси 16. При этом валы 11, 12 расположены оппозитно. Система управления 7 и обмотка статора 10 обеспечивают возможность вращения роторов 8, 9 в одинаковом направлении. Внешние концы валов 11 и 12 соединены с соответствующими входными звеньями (в частности шестернями) редукторов 2.
В конкретном примере конструктивного исполнения, являющимся рациональным на данный момент вариантом устройства, предусмотрены редукторы 2, которые выполнены каждый в виде одинаковых пар (левой 17 и правой 18) зубчатых колес, плоскости которых перпендикулярны оси роторов 8, 9, ведущие зубчатые колеса (шестерни) установлены на валах 11, 12, а ведомые зубчатые колеса установлены на индивидуальных валах 19, 20. Последние связаны с полуосями 3, 4 соответственно.
Система управления 7 по меньшей мере частично расположена в П-образной нише между электродвигателем 1 и редукторами 2 (парами зубчатых колес 17, 18). Таким образом электродвигатель 1, редукторы 2 и система управления 7 совместно образуют компактный агрегат.
В данном примере электродвигатель 1 выполнен трехфазным асинхронным, а система управления 7 включает в себя преобразователь частоты питания электродвигателя 1.
Предпочтительно поперечное расположение электродвигателя 1 на равном расстоянии от колес 5 и 6 электромобиля. При этом в электромобиле предусмотрено, как правило, два управляемых ведомых колеса (т.е. не бортовой способ поворота).
Приведенный в качестве примера промышленно реализуемый агрегат для специального или конвертированного электромобиля имеет следующие технические характеристики:
мощность.............. 12 кВт;
число оборотов выходных валов редукторов....500 с-1;
номинальный суммарный крутящий момент на выходных валах редукторов...... ..114 Н•м;
напряжение питания электродвигателя...... 160 В;
частота питания электродвигателя......(0...50) Гц;
количество фаз.............3;
номинальная сила тока...........34 А;
диаметр расточки статора..........300 мм;
длина статора.............240 мм.
Возможны другие варианты конструктивного исполнения и компоновки устройства в электромобиле в рамках заявленной совокупности существенных признаков.
Устройство работает следующим образом.
При прямолинейном движении электромобиля магнитное поле статора 10 увлекает оба ротора 8, 9 с их валами 11, 12, которые через редукторы 2 приводят в синхронное вращение колеса 5 и 6 соответственно.
Интерес представляет работа привода и движение электромобиля при потере сцепления одного из колес 5,6 с грунтом (попадание на скользкое место).
При буксовании, например, колеса 6 им развивается весьма малая тяговая сила. Колесо 5, сохранившее хорошее сцепление с грунтом, развивает полную тяговую силу и продолжает двигать электромобиль.
Никаких отрицательных явлений не будет происходить и при повороте, т.к. при этом скольжение в электродвигателе (вращение роторов относительно статора 10) не превышает 20% (из условия поворота электромобиля с колеей 1,3 м с минимальным внешним радиусом поворота 6 м).
Таким образом, сам электродвигатель наряду с основными своими функциями выполняет функцию автомобильного механического дифференциала в режиме поворота электромобиля при отсутствии основных недостатков дифференциалов.
Отпадает необходимость в специальном (механическом или ином) блокирующемся межколесном дифференциале. В отдельных случаях возможно исключение и межосевых дифференциалов полноприводных транспортных средств.
Компоновка агрегата с размещением системы управления в П-образной нише, образованной редукторами 2, обусловливает улучшение габаритно-массовых показателей привода и снижение стоимости, облегчает техническое обслуживание и ремонт электромобиля. Выполнение заявленного агрегата с трехфазным асинхронным электродвигателем с преобразователем частоты также повышает технико-эксплуатационные и экономические характеристики, что соответствует современным тенденциям в развитии электромобильного транспорта.
Изобретение относится к тяговым электромеханическим приводам транспортных средств. Привод содержит преимущественно питаемый от преобразователя частоты трехфазный асинхронный электродвигатель, связанный через редуктор с полуосями колес, и систему управления. Ротор выполнен из половин с короткозамкнутыми обмотками, которые установлены в расточке однопакетного статора соосно, с аксиальным смещением и воздушным зазором. Конструкция допускает относительное вращение половин на индивидуальных оппозитно расположенных валах в подшипниковых узлах на общей оси в одинаковом направлении. Валы соединены с входными звеньями левой и правой передач редуктора, а ведомые звенья на индивидуальных валах - с полуосями. Двигатель, редуктор и система управления совместно образуют компактный агрегат, устанавливаемый в электромобиле поперечно. Двигатель выполняет также функцию межколесного дифференциала, что позволяет исключить механический дифференциал. Привод обладает улучшенными габаритно-массовыми показателями и дешевле в производстве. 1 з.п. ф-лы. 1 ил.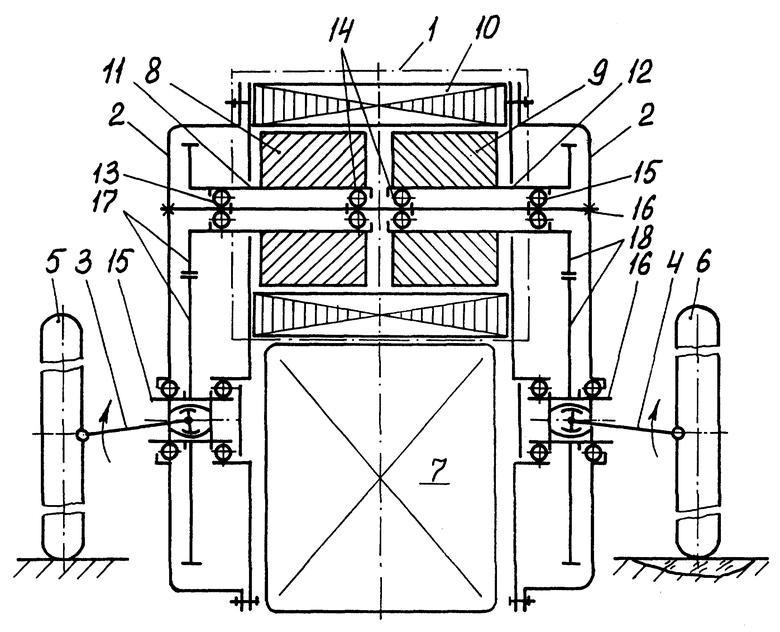
| Кипятильник для воды | 1921 |
|
SU5A1 |
| РАЗБУРИВАЕМЫЙ ПАКЕР | 2005 |
|
RU2278242C1 |
| Асинхронный двигатель | 1989 |
|
SU1778878A1 |
| ГЕНЕРАТОР СИНУСОИДАЛЬНЫХ КОЛЕБАЬП'й | 0 |
|
SU382218A1 |
