Изобретение относится к колесным и гусеничным транспортным средствам (ТС) - наземным ТС и планетоходам, преимущественно к малогабаритным мобильным платформам.
Значительную часть времени движения ТС находится в повороте, в широком диапазоне сопротивления со стороны окружающей среды (местности). Кроме того, и при прямолинейном движении ТС неодинаковое сопротивление движению под левыми и правыми бортами (гусеницами или колесами) обусловливает неустойчивость заданного режима движения.
Устойчивость, управляемость, тягово-динамические характеристики, проходимость на местности современных ТС обеспечиваются установкой на их шасси механизмов распределения мощности (МРМ) между «бортами» - левым(и) и правым(и) ведущим(и) колесом(ми), которые во многих литературных источниках (в основном в отношении к гусеничным машинам) называют механизмами передачи и поворота (МПП) [1. Расчет и конструирование гусеничных машин / Н.А. Носов и др.; под ред. проф. Н.А. Носова. - Л.: Машиностроение, 1972. - 560 с. - Гл. IX «Механизмы поворота, С. 346-398.].
Одним из примеров МРМ (МПП) может служить МРМ, содержащий двухстепенную редукторную часть, входное звено которого опосредованно связано с двигателем, а выходные звенья опосредованно, например через полуоси, связаны с левым и правым ведущими колесами ТС, с планетарными зубчатыми рядами - нулевым, первым и вторым, причем нулевой, непосредственно связанный с упомянутым входным звеном, - с функцией простого дифференциала, а также содержащий тормозные элементы с возможностью выборочного, управляемого тормозного воздействия на звенья редукторной части и электронную систему управления упомянутыми тормозными элементами, при этом редукторная часть выполнена с четырьмя цилиндрическими трехзвенными планетарными зубчатыми рядами, включая дополнительный редукторный, при этом входное ее звено непосредственно соединено со звеньями двух планетарных рядов, а система управления тормозными элементами выполнена с возможностью широтно-импульсной модуляции давления (ШИМД) во фрикционных парах тормозных элементов [2. RU 2634062 С1, В60К 17/35, F16H 48/30, F16H 37/08, 23.10.2017].
В связи с упоминанием ШИМД, следует отметить, что в области транспортного машиностроения (в том числе в системах управления поворотом гусеничных машин с использованием фрикционных тормозных элементов) рассматриваются возможности реализации ШИМД [3. К методу оценки частоты импульсного управления поворотом гусеничной машины / Бойков А.В., Григорьев А.П., Русинов Р.В. // Рабочие процессы в компрессорах и установках с ДВС: межвузовский сборник. - Л.: Изд-во ЛПИ им. М.И. Калинина, 1987. - С. 73-78].
К недостаткам упомянутого МРМ (независимо от отсутствия или наличия ШИМД) следует отнести непредусмотренность поворота с нулевым радиусом (т.е. вокруг центра тяжести ТС, «на месте») и отсоединения от двигателя.
Близким аналогом заявляемого устройства является МРМ в трансмиссии автомобиля, содержащий редукторную часть с двумя степенями свободы («двухстепенной редуктор»), входное звено которого опосредованно связано с двигателем, а выходные звенья опосредованно, например через полуоси, связаны с ведущими колесами автомобиля, с планетарными зубчатыми рядами - нулевым, первым и вторым, причем нулевой, непосредственно связанный с входным звеном, является простым дифференциалом, тормозные элементы с возможностью дифференцированного тормозного воздействия на звенья редукторной части и электронную систему управления упомянутыми тормозными элементами, связанную с рулевым механизмом с возможностью поворота управляемых колес автомобиля [4. Dr. Claus Granzov. ZV Vector Drive - better driving dynamics and diving Satety through Torque Vectoring // http://www.irs.kit.edu/download/131213_GC_TorqueVectoring_ZF_Handout. pdf. 13.12.2013].
В нем редукторная часть выполнена с простым коническим дифференциалом и двумя, слева и справа от упомянутого конического дифференциала, одинаковыми цилиндрическими трехзвенными планетарными зубчатыми рядами со ступенчатыми сателлитами, при этом входное звено редукторной части (корпус конического дифференциала) соединено с зубчатым солнцем малой ступени указанного сателлита, большая ступень последнего соединена посредством другого зубчатого солнца с одной из полуосей и, далее, с одним из ведущих колес автомобиля, а водило - с дисковыми подвижными элементами тормоза.
Этот аналог позволяет реализовывать подводимую к ведущим колесам автомобиля мощность в соответствии с условиями движения. Однако, во-первых, расположение этого МРМ после главной передачи и, во-вторых, «обрастание» МРМ дополнительными механическими, гидравлическими и электронными устройствами приводит к ухудшению массогабаритных показателей и росту себестоимости.
Другим близким аналогом является МРМ в трансмиссии автомобиля, содержащий двухстепенную редукторную часть с нулевым с функцией простого дифференциала, первым и вторым зубчатыми планетарными механизмами - рядами, входное звено которой, состоящее из двух параллельных частей, с одной стороны опосредованно, по меньшей мере через коробку передач, связано с двигателем транспортного средства, с другой стороны соединено со звеньями, по меньшей мере, двух ее планетарных рядов, а выходные звенья опосредованно, например через полуоси и бортовые передачи, связаны с ведущими колесами транспортного средства, тормозные элементы с возможностью дифференцированного тормозного воздействия на звенья редукторной части, и электронную систему управления тормозными элементами, связанную с устройством управления поворотом транспортного средства, при этом редукторная часть выполнена с тремя цилиндрическими трехзвенными планетарными зубчатыми рядами, при этом входное ее звено соединено со звеньями, по меньшей мере, двух планетарных рядов, а система управления тормозными элементами выполнена с использованием принципа ШИМД во фрикционных контактных парах тормозных элементов [5. RU 2618830 С2, В60К 17/35, F16H 48/30, F16H 37/08, 11.05.2017, пп. 1 и 2 ф-лы изобретения].
В качестве недостатка аналога можно отметить его относительную конструктивную сложность.
Наиболее близким аналогом заявляемого МРМ (выбран за прототип) является механизм распределения мощности в трансмиссии транспортного средства, содержащий связанный входным звеном с электродвигателем вспомогательный редуктор R1, выходное звено которого связано, в параллель, с управляемым дифференциалом и зубчатым планетарным редуктором R2 перераспределения силы тяги по полуосям x1 и x2 трансмиссии, выходное звено которого связано с одной из упомянутых полуосей, например х2, дисковые фрикционные муфты, управляемые, посредством гидравлического или электромагнитного приводов и электронной системы управления, взаимосвязанными с устройством управления поворотом транспортного средства, а также картер механизма [6. RU 2763002 С1, МПК (2006.01) В60К 17/35; F16H 48/30; F16H 37/08, 24.12.2021].
В нем редуктор R2 выполнен в виде двух планетарных рядов со сдвоенными сателлитами, при этом входное звено (1) редуктора R2 связано с эпициклом первого (левого) планетарного ряда, выходное звено (3) - с эпициклом второго (правого) ряда, а водила (4) и (5) этих рядов перекрестно связаны с солнечными шестернями соседних рядов и с управляемыми тормозами (Т3), (Т4), при этом предусмотрены фрикцион и тормоз на входе в дифференциал.
Однако, несмотря на относительные (в сравнении с аналогом [5]) преимущества, прототип [6] обладает еще недостаточно высокими технико-эксплуатационными характеристиками в части простоты, компактности и массогабаритных характеристик, требований мехатроники и адаптированности к трансмиссии и всей энергосиловой установки к задачам создания таких легких высокоманевренных ТС, как багги и активные прицепы, преимущественно с тяговыми электродвигателями.
Задача заключается в устранении указанных недостатков прототипа [6] и в улучшении технико-эксплуатационных (в приложении к шасси гражданских транспортных средств) или тактико-технических характеристик (в приложении к шасси военных и специальных транспортных средств).
Решение поставленной задачи достигается тем, что в механизме распределения мощности в трансмиссии транспортного средства, содержащем связанный входным звеном 0 с двигателем вспомогательный редуктор R1, выходное звено x которого, разветвляясь, связано с управляемым дифференциалом и зубчатым планетарным редуктором R2 перераспределения силы тяги по полуосям x1 и x2 трансмиссии, выходное звено которого, в свою очередь, связано с одной из упомянутых полуосей, например х2, дисковые фрикционные муфты, управляемые, посредством гидравлического или электромагнитного приводов и электронной системы управления, взаимосвязанными с устройством управления поворотом транспортного средства, а также картер механизма, согласно изобретению, редуктор R2 выполнен в виде одиночного планетарного ряда, эпицикл которого заторможен постоянной связью с картером, а солнечная шестерня и водило связаны, в параллель, с входным 0 и выходным x звеньями через фрикционные муфты C01, C1x и С03, С3х соответственно, с возможностью независимого выборочного соединения этих звеньев планетарного ряда с полуосями x1 и x2 соответствующим включением упомянутых муфт.
Решение поставленной задачи достигается также за счет дополнительных конструктивных признаков (при сформулированной выше основной совокупности признаков):
- фрикционные муфты C01, С03 с одной стороны от упомянутого одиночного планетарного ряда и фрикционные муфты C1x, С3х с другой стороны от него могут быть попарно конструктивно объединены на основе одинаковых барабанов входного 0 и выходного x звеньев (это дополнительно рационализирует компоновку МРМ в целом, улучшает его массогабаритные характеристики, усиливая тем самым заявляемый технический результат);
- при предыдущих признаках, попарно объединенные фрикционные муфты C01, С03 и C1x, С3х могут быть скомпонованы либо одна над другой, либо все в один ряд с единым типоразмером наружных дисков трения и единым типоразмером внутренних дисков трения (это в еще большей мере рационализирует конструкцию МРМ в части габаритов по ширине в первом случае, и по длине во втором случае);
- механизм может быть выполнен полностью схемно- и конструктивно симметричным относительно плоскости упомянутого одиночного планетарного ряда (это создает весьма благоприятные условия для унификации конструкции МРМ, а значит и дополнительного усиления заявляемого технического результата);
- механизм может быть скомпонован в едином картере, с образованием механического моноблока (это рационализирует конструкцию МРМ в части компактности и в большей сере отвечает конструкторской рекомендации модульности транспортного средства, что особенно важно для мобильных транспортных платформ).
Среди известных устройств и способов не обнаружены такие, совокупность существенных признаков которых совпадала бы с заявленной. В то же время, именно за счет последней достигается новый технический результат в соответствии с поставленной задачей.
Четкое разграничение ограничительной и отличительной частей приведенных совокупностей существенных признаков, отражающее результаты сравнительного анализа заявляемого устройства с прототипом, соотносятся с мировым уровнем новизны технического решения. Мировой уровень новизны - первый из триады признаков (критериев) изобретения.
Далее, совокупности отличительных существенных признаков заявляемого МРМ не является простой суммой известных технических результатов применения порознь известных компонентов устройства. Имеет место «сверхэффект» (в патентоведческом значении этого термина), который не был очевидным для специалиста из достигнутого уровня техники (разумеется, до рассмотрения заявляемого технического решения). С целым спектром дополнительных технико-эксплуатационных возможностей. Это убедительно демонстрирует изобретательский уровень разработки как второй из триады квалификационных признаков изобретения.
Третий квалификационный признак, - промышленная применимость, - также неоспорим и вытекает, прежде всего, из того же накопленного опыта проектирования, производства и эксплуатации (практического использования) двух- и трехстепенных планетарных зубчатых механизмов, фрикционных элементов и систем управления трансмиссиями и их составными частями.
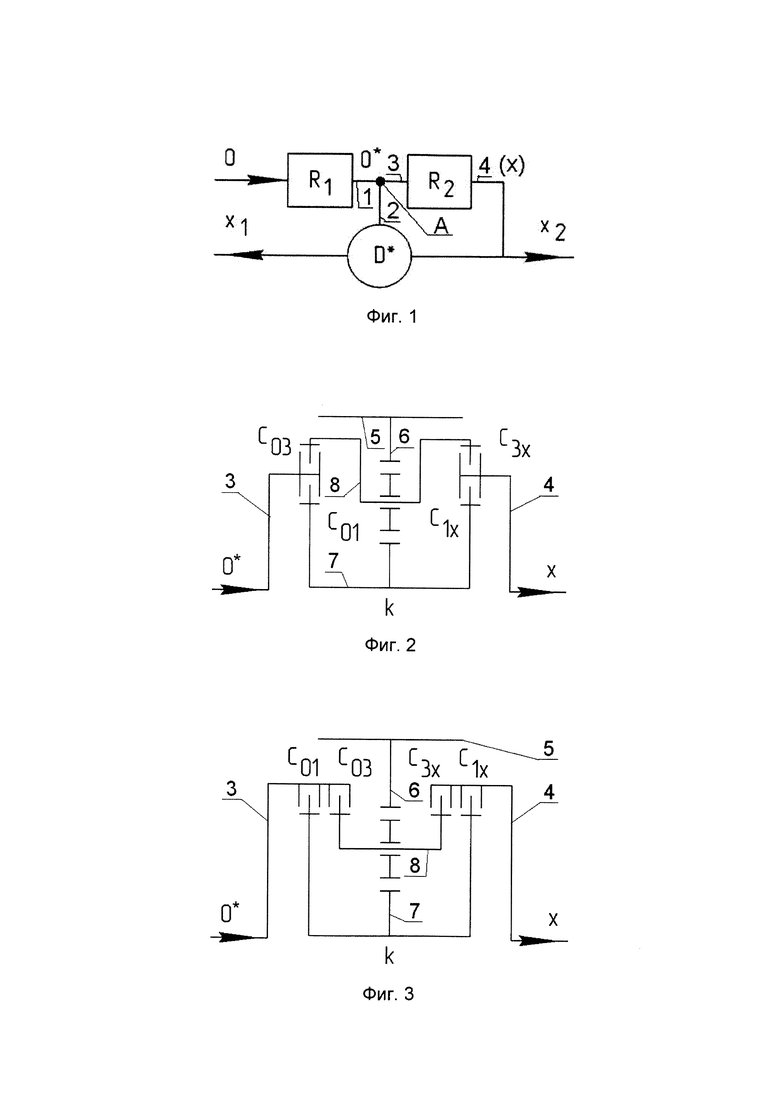
Заявляемое устройство МРМ в трансмиссии ТС пояснено (на примере с межколесным дифференциалом, функционально совмещенным с механизмом распределения мощности в повороте) на чертежах (фиг. 1-3):
на фиг. 1 показана обобщающая блок-схема заявляемого МРМ (устройства) где 0 - входное звено (от электро- или иного двигателя транспортного средства) редуктора R1; R1 - зубчатый планетарный редуктор вспомогательный; х - выходное звено редуктора R1; R2 - зубчатый планетарный редуктор перераспределения силы тяги по полуосям («по бортам»); D* - дифференциал (межколесный управляемый); x1 и x2 - соответственно, левая и правая полуоси транспортного средства; А - точка разветвления потока мощности на выходе редуктора R1 (в привязке к конструкции и функционала дифференциала D*);
на фиг. 2 - первый частный случай (первый пример, МРМ-1) кинематической схемы редукторной части R2 заявляемого МРМ (устройства), где, в дополнение к обозначениям на фиг. 1, C01, С03, C1x. С3х - дисковые фрикционные муфты (сцепления); k - внутреннее передаточное отношение планетарного ряда;
на фиг. 3 - второй частный случай (первый пример, МРМ-2) кинематической схемы редукторной части R2 заявляемого МРМ (устройства), где обозначения аналогичны обозначениям на фиг. 2.
На фигурах 1-3 позициями обозначены:
1 (0*) - выходное звено редуктора R1; 2 (0*) - входное звено дифференциала D*; 3 (0*) - входное звено редуктора R2; 4 - выходное звено редуктора R2; 5 - картер (корпус) МРМ; 6, 7, 8 - соответственно, эпицикл, солнечная шестерня и водило планетарного ряда в составе редуктора R2.
Механизм распределения мощности (МРМ) в трансмиссии транспортного средства по любому из заявляемых примеров конструктивного исполнения (МРМ-1 и МРМ-2) содержит (см. фиг. 1) связанный входным звеном 0 с электро- или иным двигателем (не показан) вспомогательный редуктор R1 (например, двухступенчатую планетарную коробку передач), выходное звено 1 (0*) которого разветвляется в точке А (в привязке к конструкции и функционала упоминаемого далее дифференциала D*); связано, в параллель, с управляемым дифференциалом D* (его входом 2) и зубчатым планетарным редуктором R2 перераспределения силы тяги по полуосям x1 и х2 трансмиссии (его входом 3), выходное звено 4 которого связано с одной из упомянутых полуосей (x1, х2), например х2.
Предусмотрены также (см. фиг. 2, 3) дисковые фрикционные муфты (сцепления) C01, C1x, С03, С3х, управляемые, посредством гидравлического или электромагнитного привода и электронной системы управления, взаимосвязанных с устройством управления поворотом (УУП) ТС (упомянутые приводы, система и УУП не показаны), а также картер (корпус) 5 МРМ (см. фиг. 1-3).
Редуктор R2 выполнен (см. фиг. 2, 3) в виде одиночного планетарного ряда, эпицикл 6 которого заторможен постоянной связью с картером 5, а солнечная шестерня 7 и водило 8 связаны, в параллель, с входным 0* и выходным x звеньями через фрикционные муфты C01, C1x и С03, С3х соответственно, с возможностью независимого выборочного соединения этих звеньев планетарного ряда с полуосями x1 и х2 соответствующим включением упомянутых муфт.
Фрикционные муфты C01, С03 с одной стороны от упомянутого одиночного планетарного ряда и фрикционные муфты C1x, С3х с другой стороны от него могут быть попарно конструктивно объединены на основе одинаковых барабанов входного 0 и выходного x звеньев.
При этом попарно объединенные фрикционные муфты C01, С03 и C1x, С3х могут быть скомпонованы либо одна над другой (см. фиг. 2), либо все в один ряд с единым типоразмером наружных дисков трения и единым типоразмером внутренних дисков трения (см. фиг. 3).
МРМ может быть скомпонован (расположен) как в составном, так и в едином картере (корпусе), с образованием механического моноблока (механического модуля). Последний частный случай предпочтителен, особенно для малогабаритных мобильных платформ.
Для максимизации технико-эксплуатационных возможностей заявляемого устройства МРМ рекомендуется его применение совместно с устройствами шасси транспортных средств, обеспечивающими реверсирование входного звена 0 МРМ или его редукторов R1 или R2. Это могут быть, например, как реверсивный тяговый электродвигатель, так и реверс (встроенный в одно из описываемых устройств или установленных вне них).
C01, С03, C1x, С3х, как элементы управления МРМ в составе R2, имеют гидравлический или электромеханический привод.
Для контроля за работой МРМ, на выходных звеньях x1, х2 устанавливают датчики частоты вращения (например, датчики Холла или датчики индукционные) - аналогично схеме прототипа (см. [5], фиг. 1).
Возможны другие кинематические схемы и конструкции в рамках заявляемых основной и дополнительных совокупностей существенных признаков.
Устройство работает следующим образом, под электронным управлением.
Работа по принципиальной схеме (рис. 1): мощность подводится к редуктору R1 от двигателя через звено 0, а снимается со звена 0*. Редуктор R1 выполняет функцию трансформирующего механизма в трансмиссии: обеспечивает адаптацию двигателя к дорожным условиям.
На выходе из редуктора R1 поток мощности разветвляется (точка А разветвления). От звена 0* мощность подводится к коробке дифференциала D* (или входному звену 2, выполняющему дистрибутивную функцию планетарного механизма - см. конкретное устройство дифференциала D*, например, в прототипе [6]), и ведущему звену 3 редуктора R2 (см. фиг. 1).
Если управление распределением мощности отключено, дифференциал D* делит момент между звеньями х1 и х2 поровну, а редуктор R2 это соотношение не изменяет. Звенья х1 и х2 являются выходными для механизма в целом и опосредованно связаны с ведущими колесами ТС.
Если управление распределением мощности активно, редуктор R2 увеличивает или уменьшает момент на звене х2 через звено 4 (х).
Если реализуется поворот с нулевым радиусом, дифференциал D* переводится в режим инверсии: с помощью входящих в его состав элементов управления обеспечивается значение передаточного отношения между полуосями х1 и х2, равное (-1). В этом случае коробка дифференциала остановлена, звено х2 вращается с угловой скоростью, определенной кинематикой редуктора R2, а звено х1 - с угловой скоростью равной по модулю угловой скорости х2 и противоположной по знаку. Если редуктор R2 обеспечивает два режима работы, можно реализовать два скоростных режима поворота в одну сторону. Для поворота в противоположную сторону необходимо либо реверсировать двигатель, либо предусмотреть реверс в составе редуктора R1.
Если необходимо заблокировать дифференциал D*, это выполняется традиционным способом: включением фрикциона, связывающего два основных звена планетарного механизма (не показано).
Работа устройства по рис. 2 и рис. 3 принципиально не различается. Отличия носят компоновочный характер и относятся к особенностям конструкции фрикционов C01, С03, C1x, С3х. Преимуществом варианта по рис. 3 является возможность выполнить конструкцию муфты по «бесфлаттерной» схеме [см. RU 2618661 С1, МПК F16D 21/00, F16D 64/04, F16D 13/52, F16D 13/69, F16D 25/0638, 05.05.2017 «Бесфлаттерная многодисковая фрикционная муфта для соединения валов привода с возможностью разнонаправленного их вращения»].
Поток мощности от ведущего звена 0* подводится к входному звену 3.
Если редуктор R2 не используется, все элементы управления отключены, выходное звено 4 вращается без нагрузки.
В режиме управления распределением мощности механизм реализует два варианта передаточного отношения: «прямое» (обозначим u) и «обратное» (обозначим 1/u), что соответствует повороту в противоположные стороны.
При повороте в одну сторону включают муфты C01 и С3х. Мощность подводится к солнечной шестерне 7 механизма, а снимается с водила 8 через звено 4. Эпицикл 6 механизма, как жестко связанный с картером 5, не вращается на всех режимах работы.
При повороте в противоположную сторону включают муфты С03 и C1x. Мощность подводится от звена 3 к водилу 8, а снимается с солнечной шестерни 7 через звено 4.
Управление буксованием фрикционных муфт более трудно реализовать, чем для тормозов. Поэтому муфты работают в режиме включено/выключено, а плавное изменение скорости буксования обеспечивается за счет управления буксованием тормозов в редукторе R1 (не показаны).
При прямолинейном движении транспортного средства (ТС), в зависимости от дорожных условий (сопротивление окружающей среды), в редукторе R1 «работает» соответствующая ступень передаточного отношения (передача). Поскольку эта редукция, как правило (см. прототип [6]) при этом невелика (основная часть потребных передаточных чисел больше единицы конструктивно перенесена на бортовые передачи за выходными звеньями редуктора R2 или непосредственно перед ведущими колесами или в их ступицах), или соразмерна с ней, что зависит от конкретных проектов, установленный за редуктором R1 редуктор R2 загружен незначительно увеличенным (на величину максимального передаточного отношения R1) крутящим моментом. Это определяет умеренность массогабаритных его показателей. Забегая вперед, отметим, что в бортовых передачах крутящие моменты повышаются до требуемого значения на ведущих колесах. При эксплуатационной необходимости (целесообразности) наряду с управлением режимом работы двигателя, переключают режим R1 (при его выполнении двух- или более ступенчатым).
МРМ перераспределяет мощности между ведущими колесами (соответственно, произведения крутящего момента на частоту вращения - M1 ω1 и М2 ω2) по командам системы управления.
Временное отключение двигателя от ведущих колес, с возможностью буксировки транспортного средства. Для этого выключают все муфты С01, С03, C1x, С3х (при этом обязательна нейтраль в редукторе R1).
На основании изложенного в описании, можно резюмировать, что заявляемое устройство, независимо от выбора того или иного частного примера схемы и конструкции (МРМ-1, МРМ-2 и т.д.), позволяет устранить отмеченные выше недостатки прототипа и улучшить технико-эксплуатационные (в приложении к шасси гражданских ТС) или тактико-технические (в приложении к шасси военных и специальных ТС) характеристики.
| название | год | авторы | номер документа |
|---|---|---|---|
| Трансмиссия секционной колесной машины, преимущественно трактора с шарнирно-сочлененной рамой | 2022 |
|
RU2796857C1 |
| МЕХАНИЗМ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ В ТРАНСМИССИИ ТРАНСПОРТНОГО СРЕДСТВА | 2021 |
|
RU2763002C1 |
| Двухрежимный дифференциальный механизм распределения мощности | 2024 |
|
RU2837931C1 |
| Межосевой дифференциальный механизм распределения мощности | 2022 |
|
RU2785499C1 |
| МЕХАНИЗМ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ В ТРАНСМИССИИ АВТОМОБИЛЯ | 2016 |
|
RU2634062C1 |
| Четырехгусеничное шасси | 2022 |
|
RU2798151C1 |
| Механизм распределения мощности в трансмиссии автомобиля | 2014 |
|
RU2618830C2 |
| ГИБРИДНЫЙ МЕХАНИЗМ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ В ТРАНСМИССИИ ТРАНСПОРТНОЙ МАШИНЫ | 2017 |
|
RU2658486C1 |
| Трансмиссия наземного транспортного средства на базе вальной коробки перемены передач | 2022 |
|
RU2794081C1 |
| ГИДРОМЕХАНИЧЕСКАЯ КОРОБКА ПЕРЕДАЧ | 1999 |
|
RU2162553C1 |
Изобретение относится к дифференциальным механизмам распределения мощности. Механизм распределения мощности содержит связанный входным звеном с двигателем вспомогательный редуктор, выходное звено которого связано параллельно с управляемым дифференциалом и зубчатым планетарным редуктором, выходное звено которого связано с одной из полуосей. Предусмотрены также четыре дисковые фрикционные муфты, управляемые посредством гидравлического или электромагнитного привода и электронной системы управления. Редуктор выполнен в виде одиночного планетарного ряда, эпицикл которого заторможен постоянной связью с картером, а солнечная шестерня и водило связаны с входным и выходным звеньями через фрикционные муфты. Достигается повышение технико-эксплуатационных или тактико-технических характеристик. 5 з.п. ф-лы, 3 ил.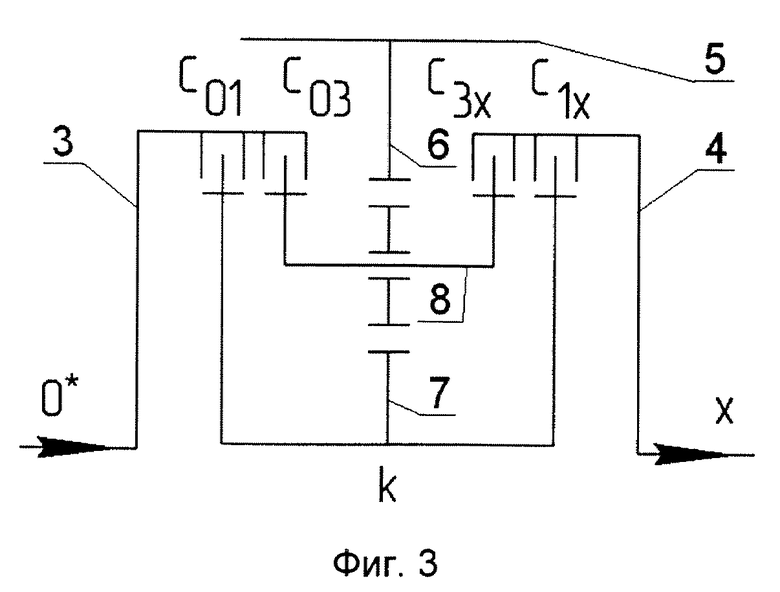
1. Механизм распределения мощности в трансмиссии транспортного средства, содержащий связанный входным звеном 0 с двигателем вспомогательный редуктор R1, выходное звено 0* которого, разветвляясь, связано, в параллель, с управляемым дифференциалом и зубчатым планетарным редуктором R2 перераспределения силы тяги по полуосям x1 и х2 трансмиссии, выходное звено которого, в свою очередь, связано с одной из упомянутых полуосей, например х2, дисковые фрикционные муфты, управляемые посредством гидравлического или электромагнитного привода и электронной системы управления, взаимосвязанных с устройством управления поворотом транспортного средства, а также картер механизма, отличающийся тем, что редуктор R2 выполнен в виде одиночного планетарного ряда, эпицикл которого заторможен постоянной связью с картером, а солнечная шестерня и водило связаны, в параллель, с входным 0* и выходным x звеньями через фрикционные муфты С01, C1x и С03, С3х соответственно с возможностью независимого выборочного соединения этих звеньев планетарного ряда с полуосями x1 и x2 соответствующим включением упомянутых муфт.
2. Механизм по п. 1, отличающийся тем, что фрикционные муфты C01, С03 с одной стороны от упомянутого одиночного планетарного ряда и фрикционные муфты C1x, С3х с другой стороны от него попарно конструктивно объединены на основе одинаковых барабанов входного 0 и выходного x звеньев.
3. Механизм по п. 2, отличающийся тем, что попарно объединенные фрикционные муфты C01, С03 и C1x, С3х скомпонованы одна над другой.
4. Механизм по п. 2, отличающийся тем, что попарно объединенные фрикционные муфты C01, С03 и C1x, С3х скомпонованы все в один ряд с единым типоразмером наружных дисков трения и единым типоразмером внутренних дисков трения.
5. Механизм по п. 1, отличающийся тем, что выполнен полностью схемно- и конструктивно-симметричным относительно плоскости упомянутого одиночного планетарного ряда.
6. Механизм по п. 1, отличающийся тем, что скомпонован в едином картере с образованием механического моноблока.
| JP 2006046495 A, 16.02.2006 | |||
| US 5518463 A1, 21.05.1996 | |||
| US 6056660 A1, 02.05.2000 | |||
| МЕХАНИЗМ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ В ТРАНСМИССИИ ТРАНСПОРТНОГО СРЕДСТВА | 2021 |
|
RU2763002C1 |

