Изобретение относится к области транспортного машиностроения и может быть использовано в конструкции колесных автотранспортных средств повышенной проходимости, преимущественно для работы в условиях внедорожного движения.
Целями предлагаемого изобретения являются повышение маневренности, проходимости и экономичности колесных полноприводных АТС и снижение динамической нагруженности его силовой передачи в условиях внедорожного движения, а также обеспечение необходимой маневренности и возможности запуска двигателя при буксировке АТС.
Условия внедорожного движения характеризуются большей, чем при дорожном движении, кривизной траектории, более частой сменой направления движения и быстро меняющимися в широких пределах коэффициентами сцепления и сопротивления качению колес, что требует снижения используемых скоростей движения и увеличенных углов поворота передних управляемых колес АТС.
Возможность повышения маневренности и проходимости АТС в значительной степени зависит от характеристик режимов частичной блокировки применяемых межколесных дифференциалов (МКД). В современных АТС (4к4) используют в основном самоблокирующиеся МКД. Блокирующий момент у этих МКД зависит либо от передаваемого крутящего момента, либо от разности частоты вращения колес.
Основным недостатком первых для условий внедорожного движения является их постоянный или меняющийся в узких пределах коэффициент блокировки. Заданный с запасом (для наиболее сложных условий движения) при увеличенных углах поворота передних колес он препятствует своевременному переходу привода колес от синхронного (блокированного) режима вращения колес к дифференциальному, особенно при движении на мягком грунте. В этих условиях увеличенный момент блокировки вызывает, как повышение бокового увода передних колес, так и тяговую перегрузку ″отстающих″ (внутренних) колес и их запредельное буксование. В результате увеличивается минимальный радиус поворота и потери энергии на буксование, снижаются маневренность и экономичность. Чем выше коэффициент блокировки, тем в большей степени снижается суммарная тяга колес ведущего моста в дифференциальном режиме привода (в тех случаях, когда переход к дифференциальному режиму возможен). В результате ухудшается проходимость АТС при повороте с малыми радиусами.
В этом отношении потенциальное преимущество имеют самоблокирующиеся МКД, у которых блокирующие моменты автоматически изменяются с изменением разности частоты вращения колес, и за счет их уменьшения при больших углах поворота передних колес снижается боковой увод последних, а также буксование “отстающих” колес. В широко применяемых “вискомуфтах” в условиях внедорожного движения это преимущество не реализуемо из-за инерционности процесса изменения вязкости рабочей жидкости. Известны самоблокирующиеся дифференциалы |1|, |2|, у которых отсутствует этот недостаток. В качестве самоблокирующего механизма у них используется гидронасос, статор и ротор которого соединены с корпусом дифференциала и одной из полуосей, соответственно, |1|, |2|. При разности частоты вращения колес Δω частота относительного вращения статора и ротора равна 0.5ωΔ, а поток рабочей жидкости от гидронасоса, перепускаемой через калиброванное отверстие |1| или игольчатый дроссель |2|, пропорционален ей. Момент сопротивления взаимному вращению статора и ротора

где C - коэффициент, пропорциональный коэффициенту сопротивления дросселя. В самоблокирующемся межколесном дифференциале |1| с “гидравлическим сопротивлением” этот момент является блокирующим. Внутренние габариты вращающегося корпуса дифференциала ограничивают рабочий объем используемого гидронасоса, а следовательно и предельные значения передаваемых крутящих моментов колес и момента блокировки МКД, которые пропорциональны весовой нагрузке колес. Чтобы преодолеть это ограничение в “героторном” дифференциале “Hydra-Loc” |2| основная часть блокирующего момента создается не гидронасосом, а гидроуправляемой фрикционной муфтой, давление в рабочем гидроцилиндре которой, поддерживаемое гидронасосом, пропорционально Mω. Таким образом, указанные дифференциалы обеспечивают либо указанную выше зависимость (1) блокирующего момента от разности частоты вращения колес |1|, либо близкую ей по характеру зависимость |2|.
Для уменьшения момента сопротивления повороту и углов бокового увода передних колес при больших углах их поворота, вне зависимости от средней величины коэффициентов сцепления колес, необходимо снижать величину C, если нет большой разницы в этих коэффициентах у “забегающих” и “отстающих” колес. При существенной их разнице, наоборот, для исключения тяговой перегрузки “забегающих” колес необходимо большее значение C. А если при этом в лучших условиях находятся “забегающие” колеса, то при средних и малых значениях углов поворота передних колес для снижения буксования “отстающих” колес, необходимо просто заблокировать дифференциал, поскольку в этом случае моменты от разности касательных сил тяги и сил сопротивления качению направлен в сторону поворота АТС. Кроме того, для нормального функционирования антиблокировочной системы торможения (ABS) АТС необходима полная разблокировка МКД с началом торможения.
В то же время в устройствах |1|, |2| рабочая магистраль гидронасоса с неуправляемым дросселем расположена в каналах вращающегося корпуса дифференциала. Известна установка в такой магистрали электроуправляемого клапана |3|. Однако возможности такого клапана ограничены тремя рабочими позициями (при наличии двух управляющих обмоток), поэтому он не сможет обеспечить и полную блокировку, и два режима самоблокировки при ступенчатой перенастройке дросселя, и полную разблокировку МКД.
Общим недостатком трансмиссии с шестеренными дифференциалами являются высокие динамические нагрузки силовой передачи в режиме полной блокировки, учитывая существенную величину микро- и макронеровностей грунтовой поверхности в условиях внедорожного движения.
Более просто проблему “многорежимности” самоблокировки МКД можно решить применением ведущих мостов с гидрообъемным дифференциалом и гидравлической межколесной дифференциальной связью, осуществляемой гидропередачей, состоящей из двух объемных гидромашин обратимого действия, роторы которых связаны с полуосями, а статоры - с ведомой шестерней главной передачи АТС |4|, |5|. В равных условиях движения относительное вращение статоров и роторов гидромашин и поток рабочей жидкости в нагнетательной магистрали гидропередачи отсутствует, давление в полостях высокого давления гидромашин и крутящие моменты колес одинаковы. При повороте АТС или при небольшой разнице коэффициентов сцепления колес возникает относительное вращение роторов относительно статоров гидромашин, при этом гидромашина замедляющегося колеса работает в режиме насоса, а гидромашина ускоряющегося колеса - в режиме мотора.
В устройстве |4| гидропередача - регулируемая за счет разнонаправленного изменения рабочего объема гидромашин, осуществляемого двумя электромагнитами с пропорциональным управлением. Недостатком этого устройства является, прежде всего, ненадежность конструкции гидромашин из-за больших консольных нагрузок на рабочие плунжеры, которые могут повлечь повышенный износ пары плунжеры-ротор, при управляющем поперечном перемещении кулачковой втулки. Отсутствует система подпитки всасывающих полостей гидромашин. Сложно обеспечить надлежащую точность системы автоматического регулирования рабочего объема гидромашин путем осевого перемещения кулачковой втулки из-за больших контактных напряжений в зоне контакта рабочих плунжеров и опорной волновой поверхностью кулачковой втулки, связанных с большими силами сухого трения. В предлагаемом устройстве не раскрыт алгоритм регулирования рабочего объема гидромашин в зависимости от угла поворота колес и разницы в коэффициентах сцепления “забегающих” и “отстающих” колес.
Известно гидрообъемное дифференциальное устройство |5|, в котором статоры двух героторных гидромашин выполнены в одном блоке с ведомой шестерней главной передачи, а роторы гидромашин закреплены на внутренних хвостовиках полуосей. Нагнетательные и всасывающие полости гидромашин через каналы внутри цапф вращающихся статоров, кольцевые внутренние канавки в опорах скольжения неподвижного корпуса дифференциального устройства, магистралями высокого и низкого давления соединены с электроуправляемым двухпозиционным четырехходовым золотником. В одном положении он соединяет соответствующие рабочие полости гидромашин, обеспечивая межколесную дифференциальную связь, а в другом положении разъединяет их, блокируя дифференциальную связь. Разблокировка ее происходит автоматически при повороте управляемых колес по сигналу датчика. Кроме того, рабочие полости каждой гидромашины через упомянутые выше кольцевые внутренние канавки соединены с электроуправляемым (от электронного блока управления) двухпозиционным золотником реверса. Этот золотник обеспечивает связь нагнетательной полости гидромашины с электроуправляемым перепускным клапаном, а всасывающую полость - с резервуаром рабочей жидкости. При изменении направления вращения колес рабочие полости гидромашин меняются ролями и указанный золотник автоматически переключается в другое положение. Указанные перепускные клапаны ограничивают давление рабочей жидкости и передаваемые колесами крутящие моменты при блокированной дифференциальной связи, а также позволяют в этом режиме уменьшить крутящий момент одного из колес, например, с меньшим сцеплением или, полностью сбросив давление, отключить активный привод колес.
Поскольку при блокированной межколесной дифференциальной связи оба колеса вращаются синхронно, а измерение крутящих моментов колес не предусмотрено, не ясно каким образом можно выявить колесо с меньшим сцеплением, чтобы за счет снижения передаваемого крутящего момента уменьшить его буксование. При прямолинейном движении эффект от снижения этого буксования, нивелируется увеличением потерь энергии в трансмиссии и снижением скорости движения за счет увеличения перепуска рабочей жидкости через клапан из нагнетательной во всасывающую полость соответствующей гидромашины. Крутящий момент “забегающего” колеса при повороте снижается при синхронном вращении колес из-за увеличенной по сравнению с “отстающим” колесом длиной траектории его движения, а при малом радиусе поворота может даже изменить свое направление. В этом случае ограничение крутящего момента этого колеса с помощью перепускного клапана не имеет смысла. При пониженном сцеплении “отстающего” колеса ограничение его крутящего момента с помощью перепускного клапана создает риск избыточной поворачиваемости и потери боковой устойчивости движения, за счет изменения знака момента сопротивлению повороту. Так что целесообразность ограничения крутящих моментов менее нагруженных колес с помощью электроуправляемых перепускных клапанов в режиме синхронного вращения колес сомнительна.
Таким образом, используя данное устройство, можно обеспечить только два режима работы ведущих колес: дифференциальный и блокированный. Отсутствие режима частичной самоблокировки межколесной дифференциальной связи |1|, |2| не позволяет использовать это устройство в условиях внедорожного движения при неодинаковых коэффициентах сцепления колес. Хотя этот недостаток устройства и мог бы быть устранен при включении в его магистраль высокого давления соответствующего регулируемого дросселя, у него есть еще ряд существенных недостатков, затрудняющих его практическую реализацию.
Циркуляция рабочей жидкости между вращающимися статорами гидромашин осуществляется через неподвижные опоры скольжения при наличии радиальных зазоров. С учетом сложности надежного их уплотнения при высоком рабочем давлении в системе это приведет к повышенным утечкам рабочей жидкости. Например, в гидравлических системах автоматических коробок передач при наличии таких же гидравлических коммуникаций с соответствующими уплотнениями и аналогичном типе гидронасосов относительная доля утечек рабочей жидкости составляет 30…40%, несмотря на низкое рабочее давление 1-1.2 МПа.
Передача через гидромашины к ведущим колесам полного крутящего момента при ограниченных габаритах корпуса главной передачи, требующих компактной конструкции гидромашин, связано с необходимостью повышения рабочего давления. Если учесть повышенные тяговые нагрузки в условиях внедорожного движения, то рабочее давление в гидромашинах может возрастать до предельного (для героторного типа) уровня 16…18 МПа. При таком уровне рабочего давления возможность снижения суммарных объемных потерь в гидропередаче относительно указанного выше уровня маловероятна. Это означает, существенное снижение кпд. привода ведущей оси колес при использовании рассмотренного устройства.
Кроме того, из-за ограниченных габаритов конструкции невозможно обеспечить необходимую 1.2-1.5 м/с скорость потока рабочей жидкости во всасывающей магистрали, а при большей скорости потока нормальная работа гидропередачи нарушается из-за попадания воздуха в рабочие полости гидромашин. Для ее надежной работы необходим замкнутый контур циркуляции рабочей жидкости с подпиткой всасывающей магистрали от специального гидронасоса (подпитки). При указанном выше уровне объемных потерь потребная производительность этого насоса будет соответственно завышена, что потребует дополнительного расхода энергии и топлива.
Таким образом, предлагаемая в |2| компоновка гидрообъемного дифференциала с размещением гидромашин, нагруженных полными крутящими моментами колес, в одном блоке с ведомой шестерней главной передачи, повторяющая компоновку шестеренного МКД, не эффективна из-за увеличенных объемных потерь в гидравлических коммуникациях гидропередачи, понижающих кпд привода колес, а также из-за габаритных ограничений на величину рабочего объема гидромашин и передаваемых ими крутящих моментов.
В основу настоящего изобретения положена альтернативная схема МКД, состоящая из двух, размещенных в колесных понижающих редукторах, однорядных суммирующих планетарных механизмов у которых одна пара соответствующих входных звеньев имеет жесткую кинематическую связь с ведомой шестерней главной передачи, а другая пара связана между собой гидрообъемной передачей с двумя гидромашинами обратимого действия, статоры которых закреплены неподвижно.
Задачами настоящего изобретения является создание трансмиссии с гидравлическими межосевой и межколесными дифференциальными связями для АТС (4к4) повышенной проходимости, обеспечивающей по крайней мере два режима самоблокировки колес ведущих мостов с зависимостью блокирующего момента от квадрата разности частоты вращения колес и режимов полной блокировки и разблокировки с автоматической системой управления выбором наилучшего из них режима по маневренности, проходимости, по уровню потерь энергии на буксование и в трансмиссии АТС; а также снижение динамической нагруженности силовой передачи и обеспечение необходимой маневренности и возможности запуска двигателя при буксировке АТС.
Технический результат - улучшение функциональных характеристик АТС (4к4): маневренности, проходимости, экономичности, надежности работы.
Решение поставленных задач достигается включением в трансмиссию полноприводного АТС, содержащую раздаточную коробку с передним и задним выходами, ведущие мосты портального типа с несоосными колесными редукторами и главными передачами, жесткой кинематической связи ведомых шестерен последних с соответствующими левыми и правыми полуосями и с входными цилиндрическими парами колесных редукторов, ведомые шестерни которых связаны с коронными шестернями однорядных суммирующих планетарных механизмов, установленных на выходе колесных редукторов, и обеспечивающих межколесные дифференциальные связи через солнечные шестерни и нерегулируемые гидрообъемные передачи, содержащих гидромашины обратимого действия, например радиально-плунжерного типа, корпуса которых закреплены на корпусах соответствующих колесных редукторов; всасывающие рабочие полости гидромашин каждого ведущего моста в тяговом режиме через золотники реверса соединены между собой магистралью низкого давления, в которую включен блок автоматического гидравлического управления блокировкой межколесной дифференциальной связи (МКДС) при отрицательных крутящих моментах колес АТС, содержащего два гидроуправляемых золотника ″постоянно открытого″ и ″постоянно закрытого″, и снабжены системой подпитки, а нагнетательные полости гидромашин в тяговом режиме колес соединены с торцевыми входными полостями гидроуправляемого трехпозиционного избирательного клапана с центрирующими пружинами и положительным перекрытием в нейтральном положении выходной полости, которая с подключенным к ней гидравлическим демпфером всегда связана с нагнетательной магистралью более нагруженной гидромашины, а также соединены с входами блока электрогидравлического управления режимами блокировки межколесной дифференциальной связи (МКДС) в тяговом режиме ведущего моста, включающим блокирующий гидравлический механизм с электроуправляемым ступенчатым изменением гидравлического сопротивления, соединенный последовательно с электроуправляемым золотником блокировки, являющихся исполнительными механизмами системы автоматического управления (САУ) режимами блокировки МКДС при повороте АТС, дублируемой кнопкой ручного управления включением полной блокировки трансмиссии и обеспечивающей автоматическое включение либо одного из двух режимов самоблокировки, основного или дополнительного с разным гидравлическим сопротивлением блокирующего дросселя, либо режима полной блокировки по командам электронного блока управления при соответствующих отклонениях текущих значений разности крутящих моментов и углов поворота передних колес от заданных пороговых значений, и текущих значений разности частоты вращения передних колес от вычисляемых верхнего или нижнего ее пороговых значений на основе измерения частоты вращения колес, углов поворота передних управляемых колес и давления в нагнетательных полостях гидромашин этих колес; при этом упомянутые выше передний и задний выходы раздаточной коробки жестко связаны между собой, а межосевая дифференциальная связь (МОДС) ведущих мостов обеспечивается посредством параллельного соединения выходов упомянутых выше блоков автоматического гидравлического управления режимами блокировки МКДС ведущих мостов с общей межосевой магистралью низкого при тяговом режиме ведущих мостов давления и выходных магистралей избирательных клапанов - с общей межосевой магистралью высокого в тяговом режиме ведущих мостов давления, причем в независимости от количества ведущих мостов в трансмиссии выходная магистраль избирательного клапана заднего моста соединена с общей межосевой магистралью напрямую, а для остальных впереди расположенных ведущих мостов - через электроуправляемые ручной кнопкой гидравлические двухрежимные блокирующие механизмы управления режимами блокировки межосевой дифференциальной связи (МОДС), обеспечивающие либо режим самоблокировки за счет гидравлического сопротивления блокирующего механизма в тяговом режиме ведущих мостов, либо режим полной блокировки, включаемый одновременно с полной блокировкой МКДС для всех ведущих мостов.
На фиг. 1 представлена кинематическая и гидравлическая схема трансмиссии, на фиг. 2, 3, 4 и 5 -несоосный колесный редуктор с встроенной радиально- плунжерной гидромашиной постоянного рабочего объема, на фиг. 6 - гидравлическая схема блока гидросистемы переднего ведущего моста, на фиг. 7 - гидравлическая схема блока гидросистемы заднего ведущего моста, на фиг. 8 - схема межосевых и межколесных гидравлических связей между нагнетательными магистралями гидромашин ведущих мостов, на фиг. 9 - дроссель гидравлического блокирующего механизма МОДС, на фиг. 10 - блок-схема системы автоматического управления режимами блокировки межколесных дифференциальных связей при повороте АТС, на фиг. 11 - функциональная схема электронного вычислительного блока, на фиг. 12 - функциональная схема преобразования аналоговых сигналов в цифровые и формирования управляющих команд в электронном блоке управления, на фиг. 13 - принципиальная электрическая схема автоматического управления исполнительными механизмами и сигнализации.
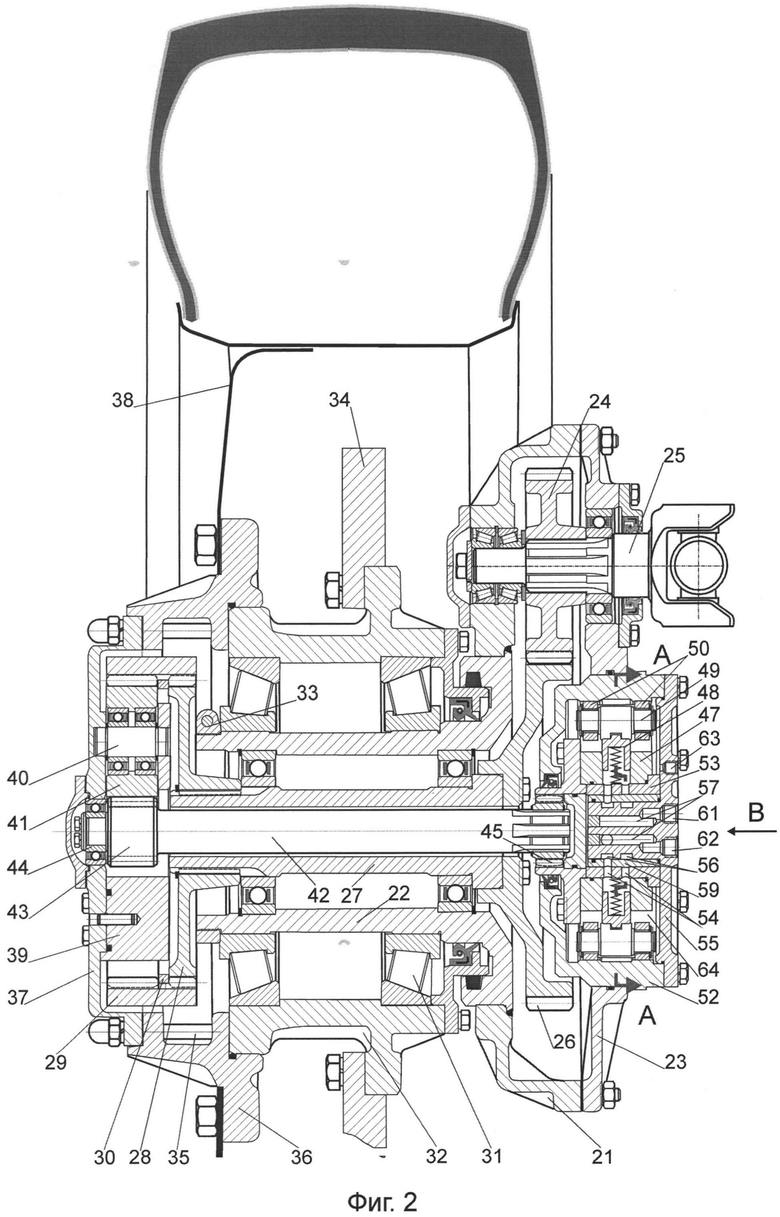
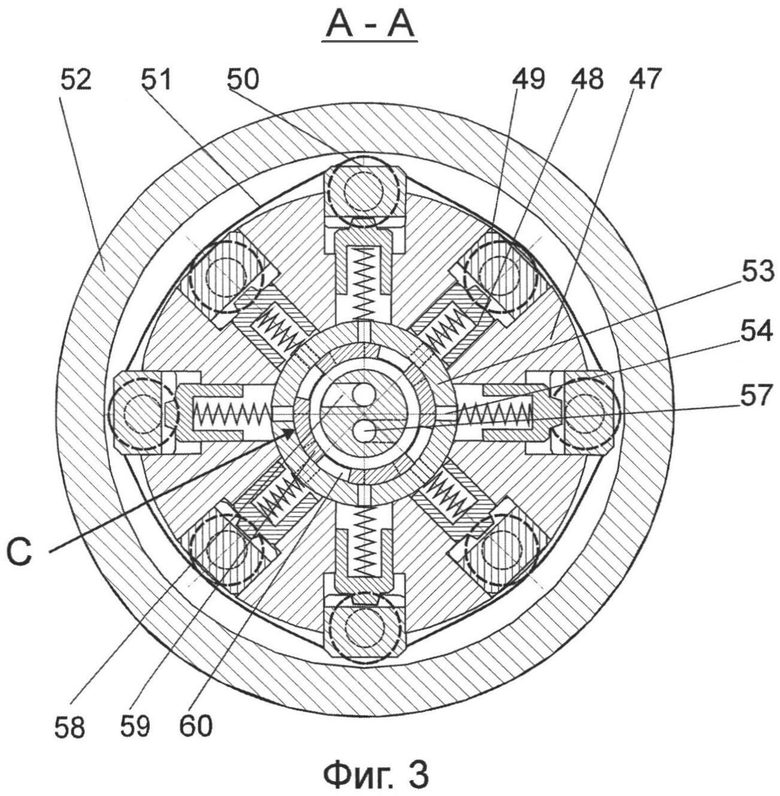
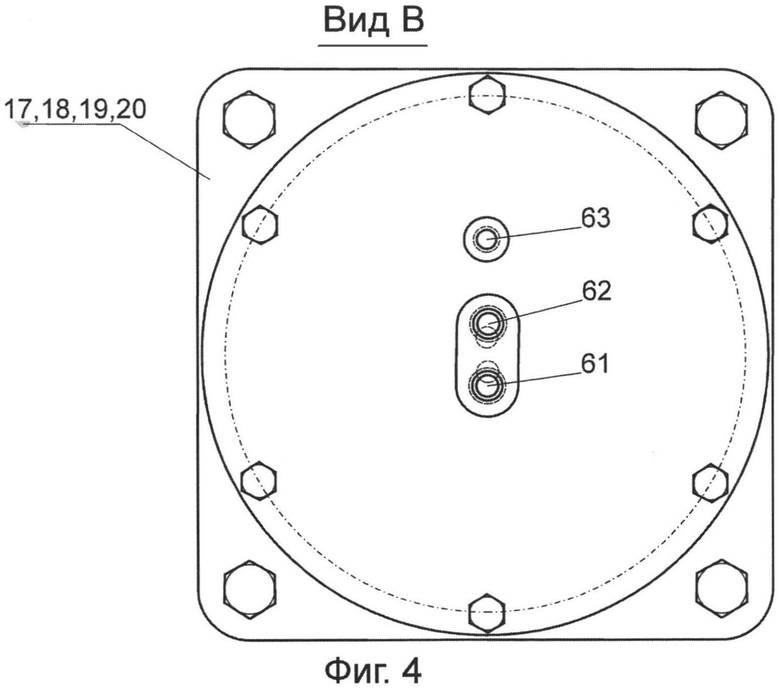
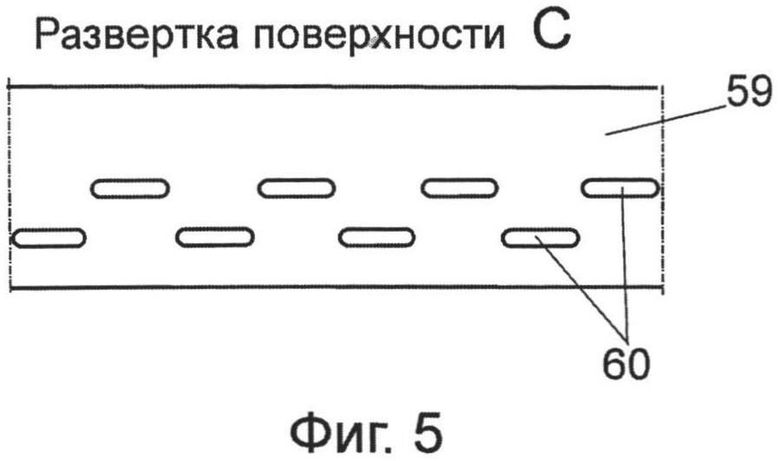
Трансмиссия (фиг. 1) содержит коробку перемены передач - 1, двухступенчатую раздаточную коробку - 2 с передним - 3 и задним выходом - 4, ведущие мосты передний - 5 и задний - 6 с ведомыми шестернями - 7 и 8 главных передач, связанными жестко с полуосями - 9, 10, 11 и 12, несоосными колесными редукторами - 13, 14, 15 и 16 и гидромашинами - 17, 18, 19 и 20 радиально-плунжерного типа. Колесные редукторы состоят из двух частей: внутренней и наружной. Внутренняя неподвижная часть колесных редукторов (фиг. 2, 3) (без элементов подвески) содержит корпус - 21, выполненный заодно со ступицей - 22, и крышку - 23. В этой части колесных редукторов размещена входная цилиндрическая пара шестерен: ведущая - 24 на входном валу - 25, соединенного карданным сочленением с соответствующей полуосью ведущего моста, и ведомая - 26, которая жестко связана с торцом трубчатого ведомого вала - 27, установленного на подшипниках внутри неподвижной ступицы - 22. На внутреннем шлицевом хвостовике ведомого вала - 27 закреплена зубчатая полумуфта - 28 с эвольвентным профилем наружных зубьев, количество и размер которых такой же, как и у коронной шестерни - 29 планетарного механизма, и которыми полумуфта сопрягается с внутренними зубьями последней. При этом в осевом направлении коронная шестерня - 29 фиксируется разрезным стопорным кольцом - 30. На наружной поверхности ступицы - 22 на радиально-упорных подшипниках - 31 установлена вращающаяся ступица - 32 колеса. Регулировка осевого зазора подшипников - 31 осуществляется стопорящейся гайкой - 33. На ступице - 32 закреплен тормозной диск - 34. К торцу ступицы - 32 с помощью шпилек - 35 пристыкован корпус - 36 подвижной части колесного редуктора и наружной части - 37 корпуса водила планетарного механизма, которая одновременно выполняет роль крышки корпуса - 36. К наружному венцу корпуса - 36 крепится колесный диск - 38. Наружная часть - 37 корпуса водила жестко соединена с его внутренней частью - 39. В цилиндрических расточках последней на осях - 40 и подшипниках установлены три сателлита - 41. Внутри трубчатого вала - 27 размещен вал - 42, заодно выполненный с солнечной шестерней - 43. Наружный хвостовик вала - 42 установлен на подшипнике - 44 в сквозной цилиндрической расточке наружной части - 37 корпуса водила, а внутренний шлицевой хвостовик с помощью ведущей зубчатой полумуфты - 45 связан ведомой зубчатой полумуфтой - 46, присоединенной к вращающемуся ротору - 47 радиально-плунжерной гидромашины. В роторе - 47 в радиальных расточках расположены семь (в данном исполнении) подпружиненных плунжеров - 48 (фиг. 3), которые наружными торцами упираются в подвижные в радиальном направлении оси - 49 опорных роликов - 50, контактирующих с направляющими - 51 неподвижного статора - 52. В ротор - 47 (фиг. 3, 4, 5) запрессована втулка - 53 с отверстиями - 54 для подвода и отвода рабочей жидкости. Ротор - 47 вместе с втулкой - 53 вращается на неподвижной распределительной цапфе, состоящей из корпуса - 55 цапфы, снабженной двумя кольцевыми наружными проточками - 56, осевыми - 57 и радиальными - 58 каналами для подвода и отвода рабочей жидкости, и бронзовой втулки - 59 с радиальными каналами - 60. При этом втулка - 59 наряду с функцией распределения рабочей жидкости выполняет роль подшипника скольжения для вращающегося ротора - 47. Осевые каналы - 57 связаны с резьбовыми отверстиями - 61 и 62 с наружной стороны корпуса - 55 цапфы для штуцеров (на фиг. 2 и 3 не показаны) соединительных магистралей между гидромашинами и блоком гидросистемы соответствующего ведущего моста. Там же выполнено резьбовое отверстие - 63 для соединения с дренажной магистралью для отвода внешних утечек рабочей жидкости из внутренней полости статора - 64.
В отличие от известного устройства |5|, крутящий момент на валу гидромашины в (k+1) раз меньше крутящего момента на колесе (k - характеристика планетарного ряда).
Это, а также радиально-плунжерный тип гидромашины с максимальным перепадом давления 30 МПа позволяют при прочих равных условиях почти на порядок уменьшить рабочий объем используемых гидромашин в сравнении с известным устройством.
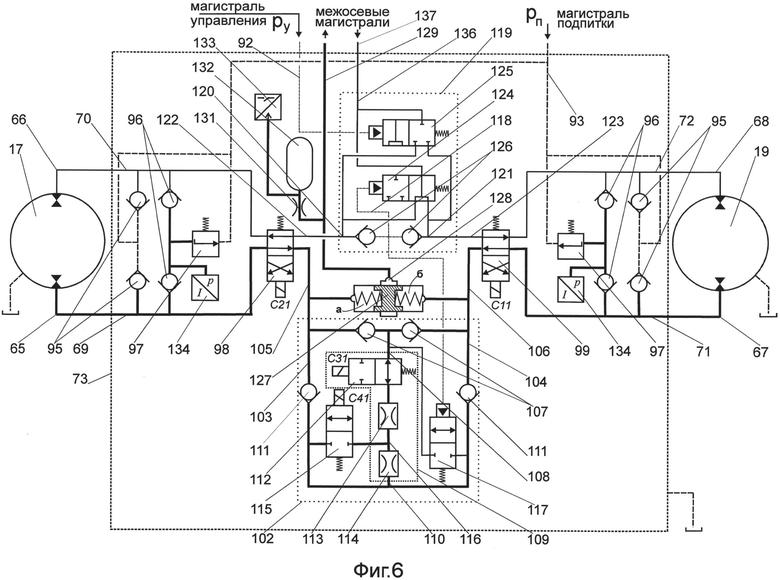
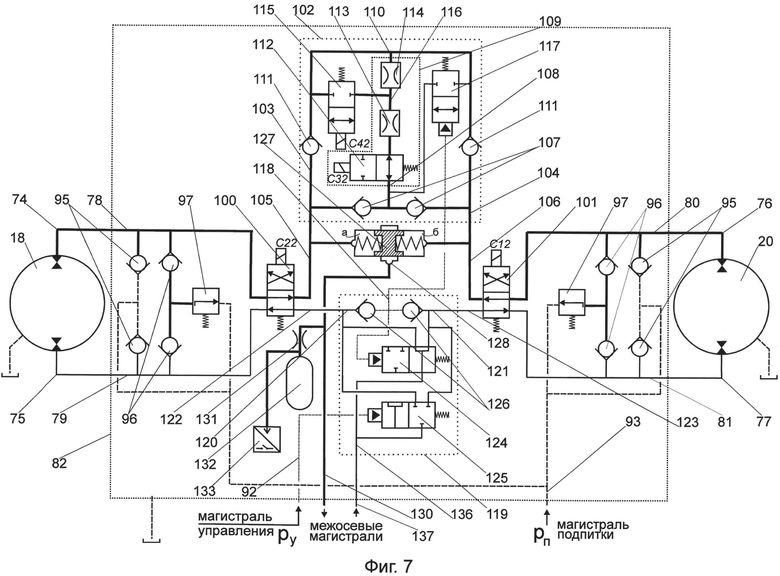
Посредством трубопроводов - 65, 66, 67, 68 гидромашины - 17, 19 переднего ведущего моста соединены с соответствующими входными магистралями - 69, 70, 71, 72 блока гидросистемы - 73 переднего ведущего моста - 5, а посредством трубопроводов - 74, 75, 76, 77 гидромашины - 18, 20 заднего ведущего моста соединены с соответствующими входными магистралями - 78, 79, 80, 81 блока гидросистемы - 82 заднего ведущего моста - 6.
Для восполнения внешних утечек рабочей жидкости в гидромашинах и поддержания в их всасывающих полостях небольшого (рп=0.4-0.5 МПа) избыточного давления трансмиссия оснащена системой подпитки. Эта система содержит два шестеренных гидронасоса - 83 и 84. Основной гидронасос - 83, приводится от первичного двигателя, например клиноременной передачей - 85, дополнительный гидронасос - 84 приводится от ведомого вала - 86 раздаточной коробки, имеющего постоянную кинематическую связь с ведущими колесами АТС. Гидронасос - 84 обеспечивает подпитку гидромашин при буксировке АТС и неработающем двигателе. После запуска двигателя к подпитке подключается основной гидронасос - 83. Давление в его нагнетательной магистрали - 87 ограничивается перепускным клапаном - 88. В нагнетательной магистрали - 89 гидронасоса - 84 при движении АТС давление ограничивается перепускным клапаном - 90, который отрегулирован на то же давление, что и клапан - 88. К этой магистрали подключен также разгрузочный клапан - 91 с гидравлическим управлением. Рабочая жидкость в его управляющую полость подводится по магистрали - 92 управления из нагнетательной магистрали - 87 гидронасоса - 83. Клапан - 91 отрегулирован на давление, несколько меньшее (ру=0.3-0.4 МПа), в сравнении с клапанами - 88 и 90. При срабатывании разгрузочного клапана - 91, нагнетательная магистраль - 89 гидронасоса - 84, соединяется со свободным сливом (в резервуар для рабочей жидкости). Общая магистраль подпитки - 93 передних гидромашин и задних гидромашин соединена с нагнетательными магистралями - 87 и 89 вышеупомянутых гидронасосов с помощью впускных обратных клапанов - 94.
Входные магистрали блоков гидросистем - 73 и 82 (фиг. 6, 7) передних и задних ведущих мостов с помощью впускных обратных клапанов - 95 соединяются с магистралью - 93 подпитки, если давление в них ниже вышеуказанного уровня давления подпитки, а с помощью выпускных обратных клапанов - 96 соединяются с соответствующими предохранительными клапанами - 97 для перепуска рабочей жидкости в магистраль подпитки - 93, если давление них превысит заданный верхний уровень (30-32 МПа).
Входные магистрали - 69, 70, 71, 72 блока гидросистемы - 73 переднего ведущего моста соединены с входами соответствующих электроуправляемых двухпозиционных четырехходовых золотников - 98, 99 реверса, а входные магистрали - 78, 79, 80, 81 блока гидросистемы - 82 заднего ведущего моста с входами аналогичных золотников - 100, 101. Включение золотников реверса - автоматическое, либо по сигналу датчика включения передачи заднего хода, либо по сигналу датчика положения тормозной педали.
Блоки гидросистем - 73 и 82 содержат блок - 102 электрогидравлического управления режимами блокировки МКДС в тяговом режиме ведущего моста при повороте АТС. Он идентичен для гидросистем переднего и заднего ведущих мостов. Блок - 102 имеет правый (по схеме с учетом направления движения) - 103 и левый - 104 входные каналы, которые подключены к выходным магистралям - 105, 106 соответствующих золотников - 98, 99 реверса с высоким (в тяговом режиме ведущего моста) давлением. Посредством двух выпускных клапанов - 107 либо правый входной канал - 103, либо левый - 104 соединяется с входом - 108 гидравлического блокирующего механизма - 109. Выход - 110 гидравлического блокирующего механизма с помощью впускных обратных клапанов - 111 соединяется либо с правым - 103, либо левым - 104 входным каналом блока - 102. Гидравлический блокирующий механизм - 109 содержит последовательно включенные электроуправляемый соленоидом С31 двухпозиционный двухходовой золотник - 112 полной блокировки, дроссель - 113 с малым коэффициентом сопротивления и дроссель - 114 с большим в 4-5 раз коэффициентом сопротивления. Блок - 102 снабжен электроуправляемым двухпозиционным двухходовым золотником - 115, который при включении соленоидом С41 соединяет выход - 116 из первого дросселя с выходом - 110 гидравлического механизма, отключая дроссель - 114, и гидроуправляемым двухпозиционным двухходовым золотником - 117, торцевая управляющая полость которого соединена с магистралью управления - 118, и который при включении соединяет вход - 108 с выходом - 110 гидравлического блокирующего механизма - 109. При этом обеспечивается прямое соединение правого - 103 и левого - 104 входных каналов блока - 102 в обход гидравлического блокирующего механизма - 109.
Блоки гидросистем - 73 и 82 содержат блок - 119 автоматического гидравлического управления режимами блокировки МКДС при отрицательных крутящих моментах колес ведущего моста. Он идентичен для гидросистем переднего и заднего ведущих мостов. Блок - 119 имеет правый - 120 и левый - 121 входные каналы, которые подключены к выходным магистралям - 122, 123 соответствующих золотников - 98, 99 реверса с низким (в тяговом режиме ведущего моста) давлением. Эти каналы параллельно соединены с соответствующими входными каналами гидроуправляемых двухпозиционных трехходовых золотников, “постоянно открытого” - 124 и “постоянно закрытого” - 125. Торцевая управляющая полость золотника - 125 связана с магистралью - 92 управления (от насоса - 83 подпитки), а торцевые управляющие полости золотника - 124 соединена с вышеупомянутой магистралью управления - 118, которая соединяется посредством впускных обратных клапанов - 126 либо с правым - 120, либо с левым - 121 входным каналом блока - 119. При этом возвратная пружина золотника - 124 отрегулирована на давление 0.1-0.15 от максимального рабочего давления, ограничиваемого перепускными клапанами - 97. Заданная регулировка пружины соответствует отрицательному крутящему моменту колес при холостом вращении элементов трансмиссии и коленчатого вала двигателя для его запуска буксировкой АТС.
Блоки гидросистем - 73 и 82 переднего и заднего ведущих мостов содержат гидроуправляемые трехпозиционные избирательные клапаны - 127. Каждый клапан снабжен двумя центрирующими пружинами. Входные торцевые полости “а” и “б” клапанов - 127 соединены с магистралями - 105 и 106 высокого (в тяговом режиме колес) давления. Выходные полости - 128 клапанов соединены выходными магистралями - 129, 130 в гидросистемах переднего и заднего моста, соответственно, через дроссели - 131 с гидроаккумуляторами - 132 с целью демпфирования пиковых забросов давления и с реле давления - 133 для сигнализации верхнего заданного уровня давления. Клапаны - 127 в нейтральном положении имеют положительное перекрытие выходных полостей - 128 относительно входных полостей - “а” и “б”.
Выходы обратных клапанов - 96 в блоке гидросистемы - 73 переднего ведущего моста параллельно с вышеупомянутыми предохранительными клапанами - 97 соединены с датчиками давления - 134, которые служат для определения разности крутящих моментов передних колес (в режиме полной блокировки).
При равенстве давления рабочей жидкости в полостях “а” и “б” и центральном положении клапана - 127 выход (и вход) рабочей жидкости из полости - 129 перекрыт, а при его неравенстве клапан - 127 смещается в одно из двух крайних положений, соединяя выходную полость - 128 клапана с той его торцевой полостью (“а” или “б”), в которой давление выше и которая связана с нагнетательной полостью более нагруженной гидромашины ведущего моста, работающей в этом случае в режиме насоса.
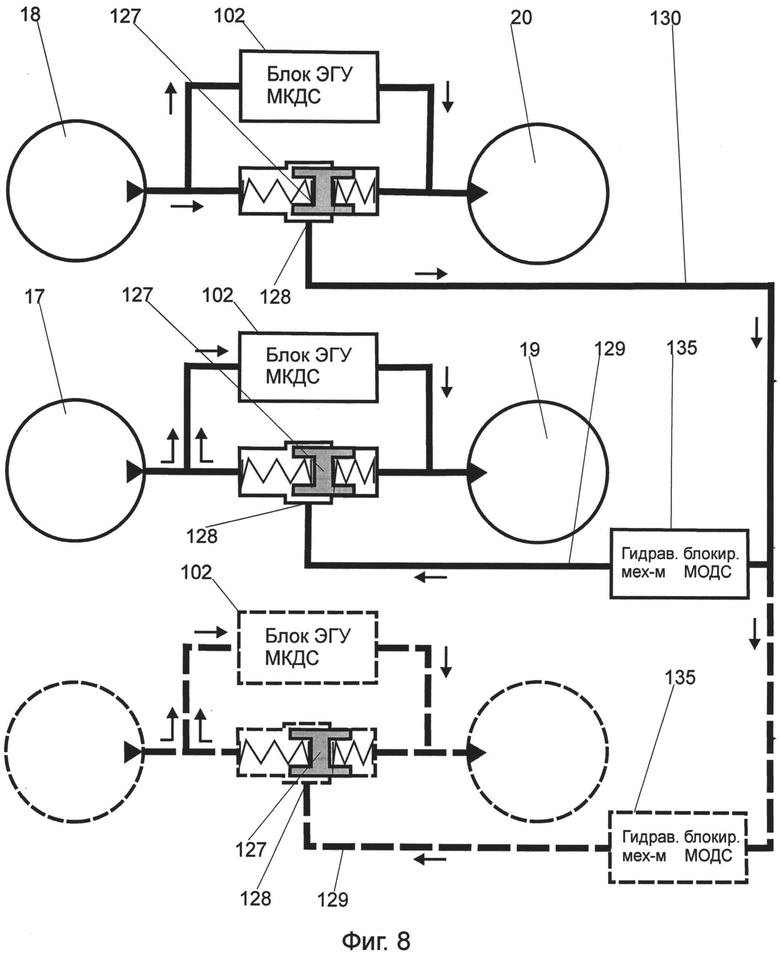
Выходные магистрали - 129 и 130 избирательных клапанов - 127 (фиг.1, 8) для двухосного АТС образуют межосевую магистраль высокого (в тяговом режиме ведущего моста) давления. Между этими магистралями (фиг.1) включен электроуправляемый гидравлический блокирующий механизм - 135 управления режимами блокировки межосевой дифференциальной связи (МОДС). Как следует из фиг.8, при трехосной ходовой системе межосевая магистраль высокого давления состоит также из магистрали 130 и соединенных с ней параллельно двух магистралей - 129 с гидравлическими блокирующими механизмами - 135 переднего и среднего ведущих мостов. А при четырехосной ходовой системе с магистралью - 130 уже будут параллельно соединены три магистрали - 129 с гидравлическими блокирующими механизмами - 135.
Выходные магистрали - 136 (фиг.6, 7), связанные с выходами золотников - 124 и 125, блоков - 119 гидравлического управления блокировкой МКДС при отрицательных крутящих моментах колес параллельно соединены с межосевой магистралью - 137 низкого (в тяговом режиме ведущих мостов) давления.
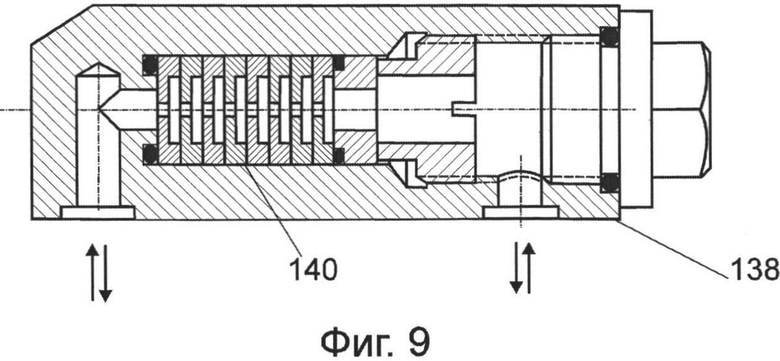
Гидравлический блокирующий механизм - 135 управления режимами блокировки МОДС (фиг.1) содержит последовательно соединенные дроссель - 138 и электроуправляемый от ручной кнопки управления Ку2 (фиг.13) двухпозиционный золотника - 139 полной блокировки МОДС. Включение золотника - 139 кнопкой Ку2 происходит одновременно с включением золотников - 112 полной блокировки МКДС. При выключенном золотнике -139 имеет место режим самоблокировки с более высокой жесткостью характеристики (1), чем при самоблокировке МКДС. В связи с этим дроссель - 138 (фиг.9) имеет в 1.5-2.5 раза более высокое гидравлическое сопротивление в сравнении с дросселем - 114. Оба указанных дросселя с целью стабилизации коэффициента сопротивления при колебаниях температуры и вязкости рабочей жидкости выполнены пластинчатыми, в которых рабочая жидкость пропускается последовательно через шайбы - 140, установленные с небольшим зазором, и снабженные сквозными дроссельными отверстиями “с” диаметром 1.5-2 мм и длиной 1.5 мм. Дроссели - 114 и 138 отличаются только количеством шайб - 140.
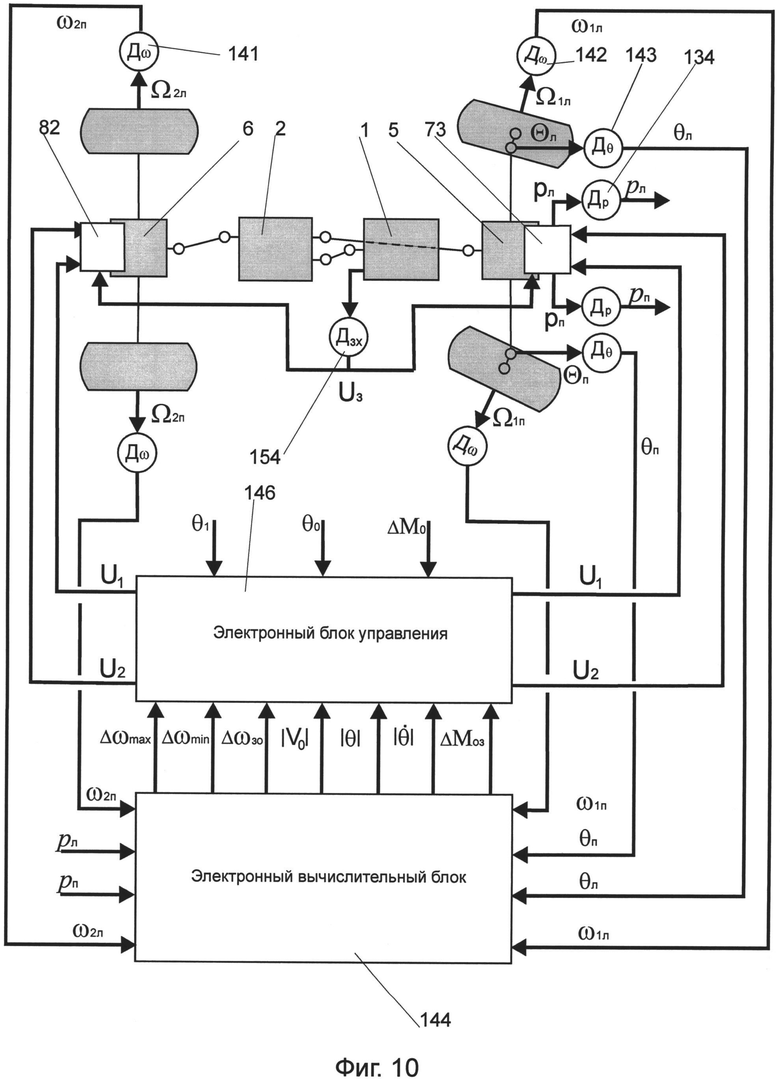
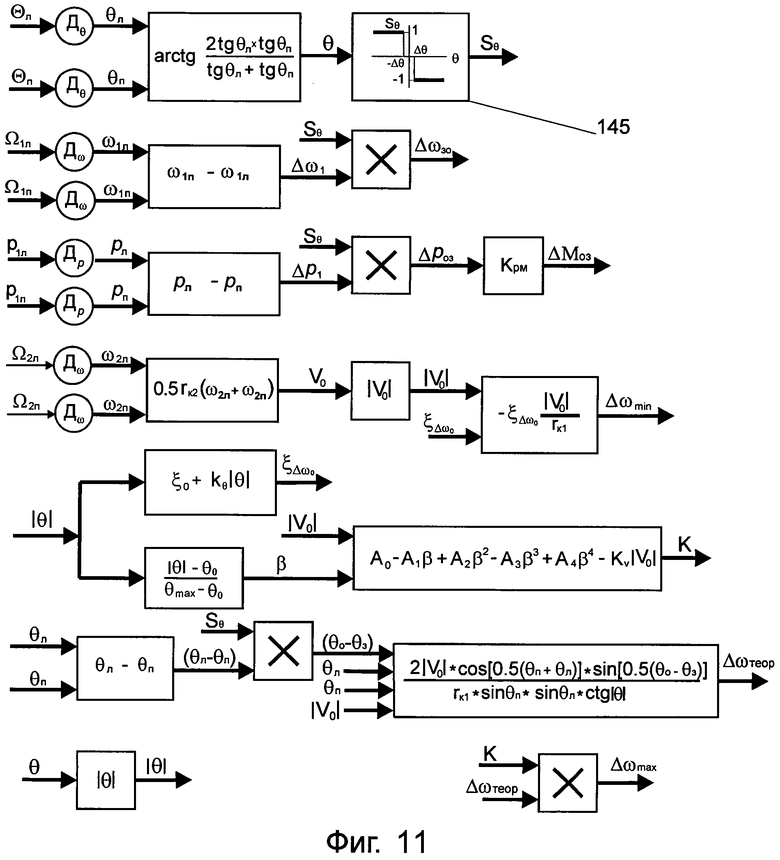
Система автоматического управления (САУ) режимами блокировки межколесных дифференциальных связей при повороте АТС в тяговом режиме ведущих мостов (фиг.10) включает вышеупомянутые датчики - 134 давления в нагнетательных полостях гидромашин переднего ведущего моста, датчики - 141, 142 частоты вращения задних и передних колес, датчики - 143 углов поворота передних колес. Сигналы указанных датчиков для левых и правых колес рл, рп, ω2п, ω1л, ω1п θл и θп, в виде аналоговых сигналов поступают на вход электронного вычислительного блока - 144. На его функциональной схеме (фиг.11) представлены математические формулы, по которым вычисляются текущие значения расчетной величины θ угла поворота колес и его абсолютная величина |θ|, фактической Δωзо и теоретической Δωтеор (без учета буксования и бокового увода колес) для заданного значения |θ| разности частоты вращения передних “забегающего” и “отстающего” колес, разность крутящих моментов ΔМоз передних “отстающего” и “забегающего” колес, абсолютной величины заданной теоретической (без учета буксования) скорости поступательного движения |V0|, а также пороговые верхнее Δωmax и нижнее (отрицательная величина) Δωmin значения разности частоты вращения передних “забегающего” и “отстающего” колес. В этих формулах конструктивные параметры АТС: rк1 и rк2 - радиусы качения передних и задних колес, θmax - максимальное конструктивное значение расчетной величины угла поворота передних колес. Расчетная величина θ угла поворота передних колес равна углу поворота условного (эквивалентного) переднего колеса с вертикальной осью поворота на пересечении с продольной осью АТС, при котором положение мгновенного центра поворота АТС сохраняется. Для определения Δωmax использован поправочный коэффициент K, равный соотношению верхнего порогового значения Δωmax и теоретического Δωтеор значений разности частоты вращения передних “забегающего” и “отстающего” колес, заданный в виде функции двух переменных |V0| и |θ|. Для вычисления его заданы постоянные Kv, A0…A4, являющиеся коэффициентами аппроксимации зависимости усредненных фактических значений поправочного коэффициента K от |V0| и |θ|, полученной при компьютерном моделировании кругового движения АТС на грунте с различными сочетаниями коэффициентов сцепления и сопротивления качению “забегающих” и “отстающих” колес при предельном буксовании наиболее нагруженного одного из двух “забегающих” колес, движущихся в худших условиях в сравнении с “отстающими”. Для определения Δωmin использована минимально допускаемая относительная его величина ξΔω0, заданная в виде линейной функции от |θ|, где ξ0 и kθ - коэффициенты аппроксимации, полученные аналогичным образом, но при одинаковых или худших условий движения “отстающих колес” в сравнении “с забегающими” для тех режимов, когда Δωзо<0. Для того чтобы при повороте АТС выявить “забегающее” и “отстающее” переднее колесо, значения θп и θл углов поворота передних колес при правом повороте приняты положительными величинами, при левом повороте - отрицательными, а в электронный вычислительный блок (фиг.11) включено релейное звено - 145 с зоной нечувствительности Δθ, в которое вводится текущее значение расчетной величины угла θ поворота передних колес. Выходной сигнал этого звена Sθ при малых углах |θ|<Δθ равен нулю, в этом случае система автоматического управления режимами блокировки не работает, а при больших значениях |θ| в зависимости от знака θ он равен либо -1 при правом повороте, либо +1 при левом повороте. При Sθ=-1 левое переднее колесо “забегающее”, а при Sθ=+1 - “отстающее”. Диапазон -Δθ<θ<Δθ примерно соответствует условиям движения АТС на дорогах с твердым покрытием, когда радиусы поворота не снижаются менее 120-150 м.
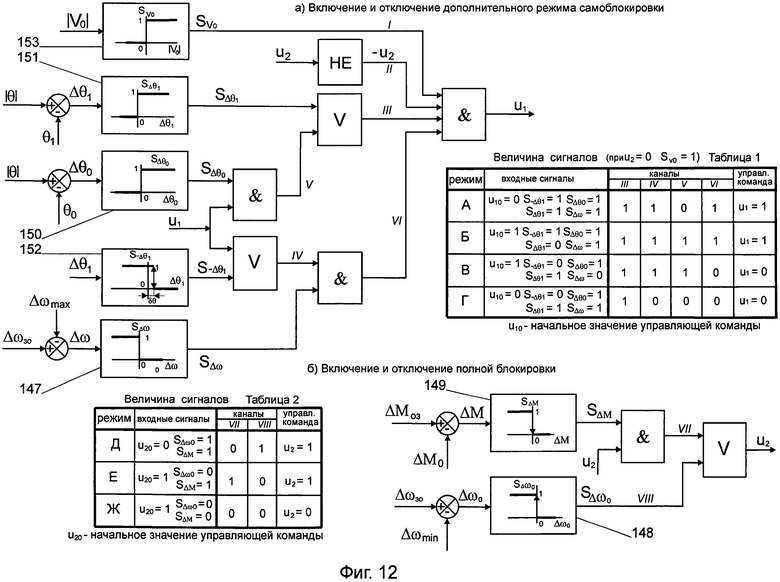
Указанные выше параметры, вычисленные в блоке - 144, поступают в электронный блок - 146 управления (фиг.12). В блок - 146 вводятся также фиксированные пороговые значения θ1 и θ0 (верхнее и нижнее) расчетной величины угла поворота передних колес и верхнее пороговое значение ΔM0 разности крутящих моментов передних “отстающего” и “забегающего” колес в режиме полной блокировки. В этом блоке текущие значения параметров Δωзо, Моз и |θ| сравнивают с соответствующими пороговыми значениями Δωmax и Δωmin, ΔM0, Δθ0 и Δθ1. Полученные в результате сравнения аналоговые сигналы Δω, Δω0, ΔM, Δθ0, Δθ1, а также |V0| преобразуют в соответствующие цифровые сигналы (1 или 0) SΔω, SΔω0, SΔM, SΔθ0, SΔθ1, S-Δθ1 и SV0 с помощью релейных звеньев - 147, 148, 149, 150,151,152 и 153. Выходной сигнал релейных звеньев 150, 151 и 153 при положительном аналоговом сигнале - “1”, а выходной сигнал остальных звеньев - “0”. На основе этих цифровых сигналов посредством логических операций “дизъюнкции” (сложения - “v”), “конъюнкции” (умножения - “&”) и “инверсии” (отрицания - “не”) автоматически выбирается одна из двух управляющих команд u1 или u2. Величина сигналов в каналах I, II…VI на входе в звено “&”, формирующего управляющую команду u1, для различных рабочих режимов (А, Б, В, Г) САУ приведена в табл.1 (фиг.12). Звено - 152 срабатывает с запаздыванием δθ=0.5°-1.0° относительно звена - 151 при увеличении |θ| и с таким же опережением - при уменьшении |θ|. Эта задержка сигнала S-Δθ1=1 при увеличении |θ| и достижении порогового значения |θ|=θ1 гарантирует u1=1 и позволит избежать сбой в работе САУ.
Величина сигналов в каналах VII и VIII на входе в звено “V”, формирующего команду u2 для различных рабочих режимов (Д, Е, Ж) САУ, приведена в таблице 2.
Команды включения “1” и выключения “0” для сигналов u1 и u2 обеспечиваются при соблюдении следующих условий: u1=1 - при SΔθ1=1, S-Δθ1=1 и u2=0; u1=0 - при SΔθ0=0 или SΔω=0 или SΔω0=0; u2=1 - при SΔω0=1; u2=0 - при SΔM=0.
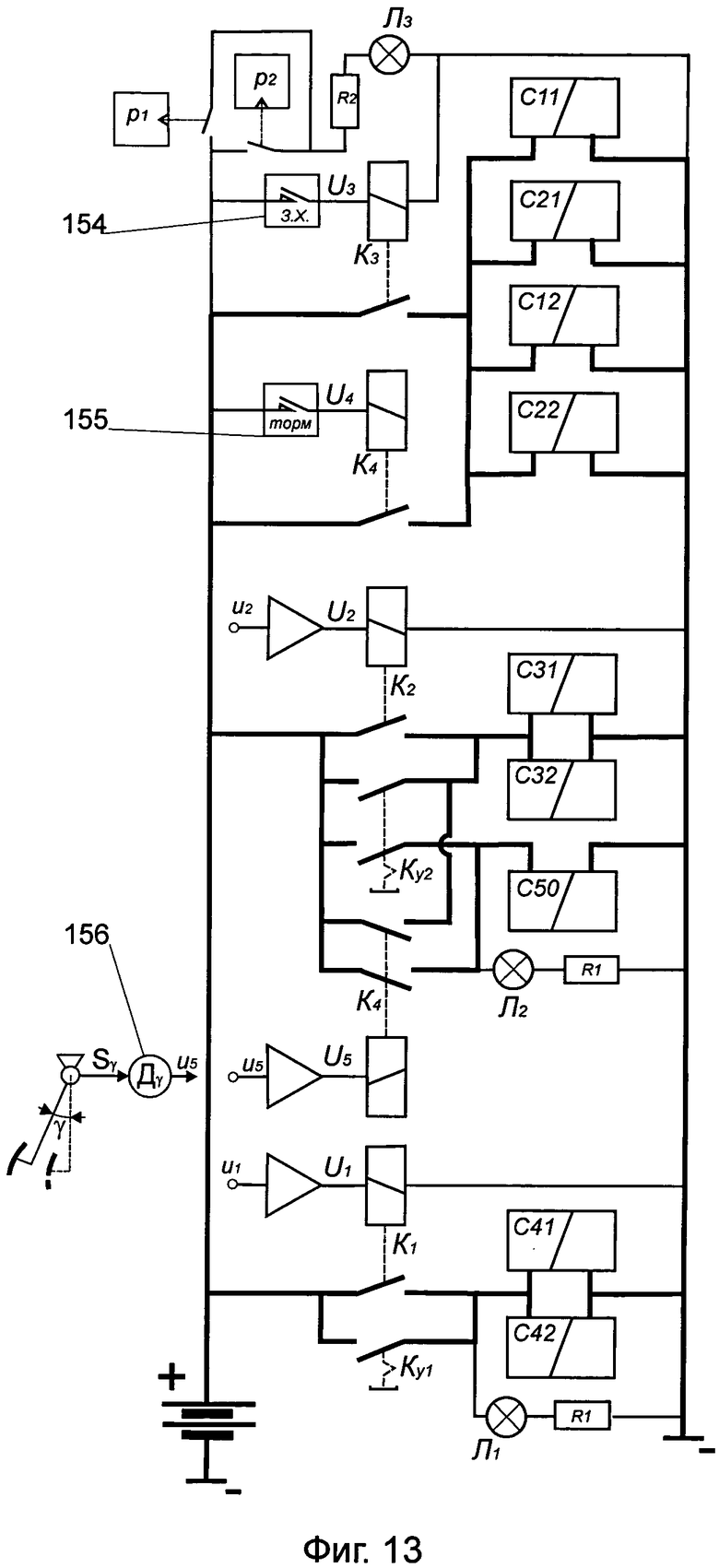
После усиления u1 и u2 сигналы U1, U2 подаются на соответствующие обмотки реле управления соленоидами в блоках гидросистем - 73, 82 переднего и заднего ведущего моста. Командный сигнал U1 (фиг.13) включения дополнительного режима самоблокировки при повороте АТС подается на обмотку постоянного разомкнутого реле K1 управления параллельно включенными соленоидами C41, C42 золотников - 115 гидравлических блокирующих механизмов - 109 (фиг.6, 7). Реле K1 дублируется кнопкой Ку1 принудительного включения, и о включении дополнительного режима самоблокировки сигнализирует сигнальная лампа (зеленого цвета) Л1. При отсутствии командных сигналов системы автоматического управления режимами блокировки межколесных дифференциальных связей (U1=0 и U2=0) и выключенных кнопках ручного управления Ку1 и Ку2 включен основной режим самоблокировки. Командный сигнал U2 включения полной блокировки межколесных дифференциальных связей при повороте АТС подается на обмотку постоянно разомкнутого реле K2 управления параллельно включенными соленоидами C31, C32 золотников - 112 гидравлических блокирующих механизмов - 109 (фиг.6, 7). О включении указанных соленоидов сигнализирует сигнальная лампа (желтого цвета) Л2.
Сигнал U3 включения передачи заднего входа от датчика - 154 (фиг.10, 13) подается на обмотку постоянно разомкнутого реле K3 управления (фиг.13) параллельно включенными соленоидами C11, C21, C12, C22 золотников - 98, 99, 100, 101 (фиг.6, 7). В этом случае магистрали - 105 и 106 соединяются с магистралями - 70, 72 гидросистемы переднего моста и магистралями 79, 81 - заднего моста. Эти же соленоиды включаются постоянно разомкнутым реле K4 при подаче на обмотку последнего сигнала U4 от датчика - 155 (фиг.13) положения тормозной педали при торможении АТС. В этом случае обеспечивается разблокировка межколесных дифференциальных связей.
Сигнал U5 автоматического включения полной одновременной блокировки межосевой и межколесных дифференциальных связей при разгоне АТС подается от датчика - 156 (фиг.13) перемещения педали акселератора на обмотку постоянно разомкнутого реле K5, управляющего включением соленоидов C31, C32 и C50 золотников - 112 и 139 (фиг.1, 6 и 7).
О тяговой перегрузке наиболее нагруженного колеса АТС сигнализирует сигнальная (красного цвета) лампа Л3 в цепи параллельно включенных реле давления - 133 (фиг.6, 7) в блоках гидросистем - 73, 82 переднего и заднего ведущего моста.
Работу трансмиссии в тяговом режиме переднего и заднего ведущих мостов необходимо рассматривать при двух вариантах непрямолинейного движения:
- при неработающей системе автоматического управления режимами блокировки МКДС, когда углы поворота передних колес малы -Δθ<θ<Δθ, а радиусы поворота АТС составляют не менее 120-150 м;
- при работающей системе автоматического управления режимами блокировки МКДС при больших углах поворота колес и меньших радиусах поворота.
При неработающей системе автоматического управления режимами блокировки МКДС и при незадействованных кнопках ручного управления режимами блокировки трансмиссия (фиг.1) в тяговом режиме ведущих мостов работает следующим образом. В случае равенства крутящих моментов на ведущих колесах каждого ведущего моста при одинаковом сцеплении правых и левых колес давление в нагнетательных полостях соответствующих гидромашин и нагнетательных магистралях - 105 и - 106 соответствующего блока гидросистемы одинаково. Поток рабочей жидкости через золотники - 98, 99 реверса гидросистемы переднего ведущего моста (фиг.6), через золотники - 100 и 101 реверса гидросистемы заднего ведущего моста (фиг.7), соответствующие магистрали - 105 и 106 высокого давления (фиг.6 и 7) и каналы - 103 и 104 гидравлических блокирующих механизмов - 109 при равенстве давления в нагнетательных магистралях - 105 и 106 благодаря обратным клапанам - 111 отсутствует. Избирательные клапаны - 127 находятся в нейтральном (центральном) положении, перекрывая свои выходные полости - 128 и межосевые магистрали - 129 и 130, блокируя МОДС. Роторы - 47 гидромашин и солнечные шестерни - 43 (фиг.2) соответствующих колесных редукторов неподвижны. Связанные между собой жесткой кинематической связью полуоси - 9, 10, 11, 12 вращаются синхронно, обеспечивая равенство частоты вращения коронных шестерней - 29 (фиг.2) и ведущих колес. Блокировка МОДС при малых углах поворота передних колес обеспечивает возможность уменьшить потери энергии при больших углах подъема дорожного полотна.
При неодинаковом сцеплении правых и левых колес, колеса одного борта АТС с более высоким коэффициентом сцепления более нагружены, чем колеса другого борта с меньшим коэффициентом сцепления. Более нагруженные колеса замедляются за счет обратного вращения солнечных шестерен - 43 колесных редукторов, а менее нагруженные колеса - ускоряются за счет вращения этих шестерен в направлении вращения колес. Равенство давления рабочей жидкости в нагнетательных полостях соответствующих гидромашин и в магистралях - 105 и 106 (фиг.6 и 7), а также во входных каналах - 103 и 104 блоков - 102 электрогидравлического управления нарушается. Рабочая жидкость из нагнетательных полостей гидромашин замедляющихся более нагруженных колес через соответствующие нагнетательные магистрали (105 или 106) с более высоким давлением и через впускные обратные клапаны - 107 начнет поступать на входы - 108 гидравлических блокирующих механизмов - 109 переднего и заднего ведущих мостов, и далее, если не включены золотники - 112 полной блокировки, - к выходам - 110 и через обратные клапаны - 111 и нагнетательные магистрали (105 или 106) с меньшим давлением в нагнетательную полость гидромашин ускоряющихся менее нагруженных колес. При U1=0 и U2=0 на соленоидах C41 и C42 напряжение отсутствует. Доступ рабочей жидкости из магистрали - 116 к выходу - 110 гидравлических блокирующих механизмов перекрыт золотником - 115, поэтому рабочая жидкость проходит последовательно через два дросселя - 113 и 114, обеспечивая основной режим самоблокировки МКДС. Перепад давления на гидравлическом блокирующем механизме - 109 и блокирующий момент пропорциональны квадрату расхода рабочей жидкости через блокирующий механизм и квадрату разности частоты вращения колес (1). Под действием разности давления в торцевых полостях “а” и “б” избирательный клапаны - 127 смещены в крайнее положение, в сторону торцевой полости с меньшим давлением, а их выходные полости - 128 и межосевые магистраль - 129 у переднего ведущего моста и - 130 у заднего ведущего моста соединены с нагнетательными полостями более нагруженных гидромашин. В этом случае между гидромашинами более нагруженных (замедляющихся) колес - межосевая дифференциальная связь. При неодинаковой тяговой нагрузке ведущих мостов рабочая жидкость перепускается через дроссель - 138 (фиг.1) гидравлического блокирующего механизма - 135 между межосевыми магистралями - 130 и 129 от более нагруженной давлением магистрали к менее нагруженной. Перепад давление на дросселе - 138 и блокирующий момент пропорциональны квадрату расхода рабочей жидкости через дроссель, величина которого зависит от разницы буксования передних и задних колес, будут существенными лишь для условий внедорожного движения с пересеченным рельефом местности и движения в тяжелых дорожных условиях при больших углах подъема дорожного полотна.
В некоторых случаях возможно использование полной одновременной блокировки межосевой и межколесных дифференциальных связей, осуществляемой включением с помощью кнопки Ку2 (фиг.13) ручного управления золотников - 112 и 139 гидравлических блокирующих механизмов - 109 и 135 (фиг.1, 6 и 7). Например, при движении АТС с большими радиусами поворота в тяжелых дорожных условиях, когда разница коэффициентов сцепления и сопротивления качению, а соответственно, и тяговая нагрузка правых и левых колес изменяется в широких пределах. Колебания тяговой нагрузки колес и давления в магистралях - 105 и 106 вызывает соответствующие колебания избирательного клапана - 127, при этом гидроаккумулятор - 132 всегда соединяется с более нагруженной давлением магистралью. Благодаря этому жесткость привода более нагруженных колес существенно снижается (в 3-5 раз в зависимости от параметров гидроаккумулятора и среднего уровня нагрузки). В результате “срезаются” пиковые нагрузки гидромашин и вращающихся элементов привода более нагруженных колес переднего и заднего ведущих мостов. Гидроаккумулятор является фильтром высокочастотных составляющих тяговой нагрузки. Благодаря дросселю - 131, в процессе разрядки - зарядки гидроаккумулятора снижается и амплитуда вынужденных низкочастотных колебаний крутящего момента. Это положительно влияет как на увеличение ресурса трансмиссии, так и на снижение буксования более нагруженных колес благодаря уменьшению не только амплитуды колебаний, но и скорости изменения крутящих моментов.
При повороте АТС с включенными золотниками - 112, 139 полной блокировки межосевой и межколесных дифференциальных связей (САУ отключается) доступ рабочей жидкости из нагнетательных полостей гидромашин “отстающих” колес в нагнетательные полости гидромашин “забегающих” колес и от гидромашины заднего “отстающего” колеса к гидромашине переднего “отстающего” колеса полностью перекрыт (фиг.1, 6, 7). При этом давление в нагнетательных полостях “отстающих” колес и их крутящие моменты вследствие увеличения их буксования возрастают, а перепад давления рабочей жидкости в рабочих полостях гидромашин “забегающих” колес и их крутящие моменты вследствие уменьшения буксования снижаются. Снижение давления в нагнетательных полостях гидромашин этих колес ограничивается величиной давления рп подпитки, когда рабочая жидкость из магистрали - 93 подпитки через соответствующие впускные обратные клапаны - 95 начнет поступать в эти полости. В этом случае крутящие моменты гидромашин, работающих в режиме моторов, “забегающих” колес снижаются до нуля. Учитывая механические потери в этих гидромашинах и в колесных редукторах, движение колес будет происходить в “пассивном” режиме при небольшой отрицательной касательной силе тяги, что эквивалентно отключению их привода (как и при установке в ступицах колес механизмов с обгонными муфтами для автоматического отключения колес). Если в этом случае производительность основного (на первичном двигателе) гидронасоса - 83 (фиг.1) при заданной скорости движения АТС недостаточна и давление подпитки снижается ниже заданного вышеуказанного уровня ру настройки разгрузочного клапана - 91, этот клапан выключается и перекрывает свободный слив рабочей жидкости из нагнетательной магистрали - 89 дополнительного гидронасоса - 84 подпитки. Давление рабочей жидкости в нагнетательных магистралях - 87 и 89 обоих гидронасосов выравнивается и в магистраль подпитки - 93 начинает поступать рабочая жидкости от двух гидронасосов - 83 и 84 под давлением рп=ру, пока потребность в размере подпитки не снизится, например, после завершения поворота АТС.
Полная блокировка межосевой и межколесных дифференциальных связей включается автоматически при разгоне АТС в случае дорожного движения по сигналу u5 датчика - 156 перемещения педали акселератора (фиг.13) через обмотку постоянно разомкнутого реле K5 и подачи напряжения на соленоиды C41, C42 и C50 золотников 112 и 139 (фиг.1, 6, 7).
При торможении АТС по сигналу U4 датчика - 155 положения тормозной педали с помощью постоянно разомкнутого реле K4 и соленоидов C11, C21, C12 и C22 (фиг.13) включаются золотники - 98, 99, 100 и 101 (фиг.6, 7) реверса, которые соединяют между собой нагнетательные полости гидромашин каждого ведущего моста магистралями - 120 и 121 напрямую. При этом давление в этих магистралях и магистрали - 118 управления повышается, и под действием его включаются гидроуправляемые золотники - 117, соединяющие входы - 108 и выходы - 110 гидравлических блокирующих механизмов - 109 напрямую в обход дросселей - 113 и 114, исключая перепад давления рабочей жидкости между полостями гидромашин низкого давления. В результате, межколесные дифференциальные связи разблокированы и обеспечивается эффективное использование антиблокировочной системы торможения (ABS).
В некоторых случаях эксплуатации АТС возможны режимы движения, в том числе и непрямолинейного, при отрицательных крутящих моментах колес. К таким режимам относятся аварийная буксировка АТС, запуск двигателя с помощью буксировки, движение “накатом” при торможении двигателем. В этих случаях рабочие полости гидромашин и соответствующие входные магистрали блока гидросистемы - 73 ведущих мостов меняются ролями. Входные магистрали - 70, 72 и соответствующие магистрали - 120, 121 (фиг.6, 7), а также межосевая магистраль - 137 соединяются с нагнетательными полостями гидромашин и давление рабочей жидкости в них определяется величиной момента сопротивления либо холостому вращению элементов трансмиссии от коробки передач до колес при аварийной буксировке АТС, либо всей трансмиссии и коленчатого вала неработающего двигателя при его запуске на буксире. Соответственно в гидросистемах переднего и заднего ведущих мостов повышается давление рабочей жидкости в магистрали - 118 управления, под действием которого включается гидроуправляемый “постоянно закрытый” золотник - 117, соединяющий напрямую в обход гидравлического блокирующего механизма - 109 его вход - 110 и выход - 108 и, соответственно, магистрали - 105 и 106. Давление в торцевых полостях “а” и “б” избирательных клапанов - 127 выравнивается и эти клапаны, занимая нейтральное положение, перекрывают доступ рабочей жидкости в межосевые магистрали - 129 и 130 и дросселю - 138 (фиг.1). Входные магистрали - 69, 71 и соответствующие магистрали - 105, 106 (фиг.6, 7) блока - 73 гидросистемы соединяются со всасывающими полостями гидромашин и через обратные клапана - 95 - с магистралью - 93 подпитки. При неработающем двигателе подпитка осуществляется от дополнительного гидронасоса - 84, который приводится от выходного вала - 86 раздаточной коробки. В магистралях - 105 и 106 гидросистем переднего и заднего ведущих мостов установится одинаковое давление, равное давлению рп подпитки.
При аварийной буксировке АТС с отключенным вторичным валом коробки передач момент сопротивления холостому вращению элементов трансмиссии невелик. Соответствующее давление рабочей жидкости в магистрали - 118 (фиг.6, 7) недостаточно, чтобы включить гидроуправляемый “постоянно открытый” золотник - 124, пружина которого настроена на более высокое давление, соответствующее моменту сопротивления вращению элементов всей трансмиссии и коленчатого вала двигателя при его запуске буксировкой АТС. Поэтому золотник - 124 сохраняет выключенное положение и соединяет между собой магистрали - 120, 121 и 137. Это обеспечивает разблокировку межколесных дифференциальных связей. При этом уменьшается разница между моментами сопротивления вращению колес АТС и потребная для его буксировки тяговое усилие, а также повышается его маневренность.
При запуске двигателя буксировкой АТС гидроуправляемый золотник - 124 под действием более высокого давления рабочей жидкости в магистрали - 118 включается, разъединяя свои рабочие полости, связанные с магистралями - 120, 121 и 137. При неработающем двигателе, от которого приводится основной гидронасос - 83 подпитки в магистрали - 92 управления давление ру=0. Поэтому гидроуправляемый “постоянно закрытый” золотник - 125 выключен. При включенном золотнике - 124 и выключенном золотнике - 125 магистрали - 120, 121 и 137 разъединены, при этом межосевая и межколесные дифференциальные полностью заблокированы. Это обеспечивает более эффективную прокрутку коленчатого вала и более быстрый запуск двигателя. После запуска двигателя основной гидронасос - 83 подпитки поднимает давление в магистрали - 92 управления до величины ру и золотник - 124 включается, соединяя между собой магистрали - 120 и 121.
При работающей системе автоматического управления режимами блокировки межколесных дифференциальных и при незадействованных кнопках ручного управления режимами блокировки трансмиссия (фиг.1) в тяговом режиме ведущих мостов работает следующим образом. При повороте АТС и неодинаковой длине траектории движения “забегающих” и “отстающих” колес тяговая нагрузка “забегающих” (наружных) колес снижается, а “отстающих” (внутренних) увеличивается за счет увеличения действительной окружной скорости первых и снижения действительной окружной скорости вторых и соответствующего снижения буксования “забегающих” и увеличения буксования “отстающих” колес. Возникает разница в давлении рабочей жидкости в нагнетательных полостях более нагруженных и менее нагруженных гидромашин. За счет обратного вращения солнечных шестерен - 43 колесных редукторов более нагруженные колеса замедляют свое вращение, а менее нагруженные колеса его ускоряют за счет вращения шестерен - 43 в направлении вращения колес. Гидромашины замедляющихся “отстающих” колес работают в режиме гидронасосов, а ускоряющихся “забегающих” колес - в режиме гидромоторов. Наибольшее замедление имеет заднее “отстающее” колесо, наибольшее ускорение - переднее “забегающее” колесо. Соответственно, у гидромашины первого - наибольшая производительность, а у гидромашины последнего - наибольший расход рабочей жидкости. При этом поток рабочей жидкости от гидромашины заднего “отстающего” колеса делится на две части. Одна часть потока рабочей жидкости через соответствующий входной канала (103 или 104) с более высоким давлением и через впускной обратный клапан - 107 (фиг.7) поступает на вход - 108 гидравлического блокирующего механизма - 109 и далее, если не включен золотник - 112 полной блокировки, - к выходу - 110 и через обратный клапан - 111 во входной канал с меньшим давлением и через соответствующую нагнетательную магистраль (105 или 106) - в нагнетательную полость гидромашины заднего “забегающего” менее нагруженного колеса. При этом разница крутящих моментов у “отстающего” и “забегающего” задних колес пропорциональна квадрату расхода рабочей жидкости через гидравлический блокирующий механизм - 109 заднего ведущего моста. А другая часть потока рабочей жидкости через соответствующую нагнетательную магистраль (105 или 106) с более высоким давлением и через избирательный клапан - 127, который из-за неравенства давления в торцевых полостях “а” и “б” смещен в крайнее, в сторону торцевой полости с меньшим давлением, положение, поступает в межосевую магистраль - 130 высокого давления. Из этой магистрали рабочая жидкость через дроссель - 138 гидравлического блокирующего механизма - 135 (фиг.1) и межосевую магистраль - 129 высокого давления поступает во входную полость - 128 избирательного клапана - 127 переднего ведущего моста (фиг.6). Этот клапан - 127, как и у заднего ведущего моста, смещен в крайнее положение в сторону торцевой полости с меньшим давлением. Благодаря этому поток рабочей жидкости из межосевой магистрали - 129 от гидромашины заднего “отстающего” колеса поступает в нагнетательную магистраль (105 или 106) с более высоким давлением, где суммируется с потоком рабочей жидкости от гидромашины переднего “отстающего” колеса. Суммарный поток рабочей жидкости через соответствующий входной канал (103 или 104), впускной обратный клапан - 107, гидравлический блокирующий механизм - 109 и впускной обратный клапан - 111 поступает в соответствующую нагнетательную магистраль (105 или 106) с меньшим давлением и в нагнетательную полость гидромашины переднего “забегающего” колеса. При этом разница крутящих моментов у заднего и переднего “отстающих” колес пропорциональна квадрату расхода рабочей жидкости через гидравлический блокирующий механизм - 135 МОДС, а разность крутящих моментов “отстающего” и “забегающего” передних колес, пропорциональна квадрату расхода рабочей жидкости через гидравлический блокирующий механизм - 109 МКДС переднего ведущего моста.
Система автоматического управления (САУ) работает следующим образом. С началом поворота АТС при |θ|>Δθ управляющие команды U1=0 и U2=0 и золотники - 112, 115 и 117 блоков - 102 электрогидравлического управления выключены и рабочая жидкость последовательно перепускается через дроссели - 113 и 114 гидравлических блокирующих механизмов - 109 переднего и заднего ведущих мостов. Включен основной режим самоблокировки. Включенное состояние этого режима блокировки сохраняется при малых углах поворота передних колес |θ|<θ1 (верхнего порогового значения |θ|) и U2=0 - при Δωзо>Δωmin, (нижнего граничное значение Δωзо), где Δωmin<0 (фиг.12).
При достижении |θ| верхнего порогового значения θ1 и при u2=0, SV0=1 (см. режим A, табл.1, фиг.12) SΔθ1=1 и в канале III сигнал - “1”. При условии Δωзо<Δωmax (SΔω=1) и в виду S-Δθ1=1 (выключение звена - 152 происходит с задержкой δθ=0.5°-1° относительно звена 151 при |θ|=θ1+δθ), в канале VI сигнал также -“1”. В результате - u1=1 и вместо основного режима по управляющей команде U1=1 (U2=0) посредством постоянно разомкнутого реле K1 и соленоидов C41 и C42 (фиг.13) включаются золотники - 115 блоков - 102 электрогидравлического управления (фиг.6 и 7), которые, соединяя входы - 116 дросселей - 114 (с большим гидравлическим сопротивлением) с выходами - 110 гидравлических блокирующих механизмов - 109, отключают эти дроссели и уменьшают в 5-6 раз гидравлическое сопротивление блокирующих механизмов - 109. Включенный дополнительный режим самоблокировки со значительно меньшей жесткостью вышеупомянутой характеристики (1) самоблокировки позволяет при больших углах поворота передних колес снизить величину блокирующих моментов у переднего и заднего ведущих мостов, момент сопротивления повороту АТС, боковой увод передних колес и крутящие моменты “отстающих” колес. За счет этого уменьшаются потери энергии на буксование, радиус поворота и возрастает угловая скорость поворота. Благодаря меньшим блокирующим моментам МКД включение указанного режима самоблокировки в случае примерно равных и пониженных коэффициентов сцепления “отстающих” и “забегающих” колес уменьшается удельная тяговая нагрузка “отстающих” колес, что может улучшить проходимость АТС в подобных условиях внедорожного движения.
Дополнительный режим самоблокировки при условии Δωmax>Δωзо>Δωmin сохраняется и при снижении |θ| до нижнего порогового значения θ0<θ1. В этом случае SΔθ1=0 (фиг.12), но благодаря SΔθ0=1 и u1=1 в каналах V и III сигналы - “1” (режим Б, табл.1) и управляющая команда U1=1 сохраняется.
Обратное включение основного режима и выключение дополнительного режима самоблокировки U1=0, U2=0 при условии Δωзо>ωmin происходит в двух случаях. В случае уменьшения расчетной величины угла |θ| поворота колес ниже порогового значения θ0<θ1. В этом случае при SΔθ0=0 и SΔθ1=0 в канале III - “0”. Такое соотношение верхнего и нижнего пороговых значений исключает возможность “зацикливания” системы управления в области порогового значения [θ|=θ1 и стабилизирует ее работу. В случае увеличения разности Δωзо частоты вращения “забегающего” и “отстающего” передних колес, вызванного повышенным буксованием движущегося в худших условиях “забегающего” колеса до верхнего предела Δωзо=Δωmax. В различных условиях внедорожного движения это пороговое значение примерно соответствует предельно допустимому буксованию переднего “забегающего” колеса. В этом случае на выходе релейного звена 151 (фиг.13) SΔω=0 и в канале VI сигнал также “0” (режим B, табл.1). При u1=0 дополнительный режим самоблокировки отключается, при этом из-за большей жесткости характеристики (1) самоблокировки разность Δωзо частоты вращения снижается и на выходе звена - 151 SΔω=1. Однако обратного включения дополнительного режима самоблокировки не происходит, так как при u1=0 и S-Δθ1=0 в канале IV сигнал - “0” и соответственно в канале VI сигнал также - “0” (режим Г, табл.1). В этом случае U1=0, цепь питания соленоидов C41 и C42 размыкается, золотники - 115 (фиг.6 и 7) выключаются, гидравлическое сопротивление блокирующих механизмов - 109 резко возрастает и поворот АТС совершается при более жесткой характеристике самоблокировки. Обратное включение дополнительного режима произойдет лишь после снижения угла поворота колес до верхнего порогового значения θ1 с опережением на величину δθ=0.5°-1°, когда S-Δθ1=1 (режим A, табл.1) (фиг.12).
В определенных условиях при основном или дополнительном режимах самоблокировки за счет большой разницы в величине буксования “отстающего” и “забегающего” передних колес возможно изменение знака Δωзо. Такой режим поворота возникает либо при одинаковых коэффициентах сцепления и коэффициентах сопротивления качению “забегающих” и “отстающих” колес и углах поворота передних колес, не превышающих 12°-15°, либо при любых углах поворота и худших условиях движения “отстающих” колес, с низким коэффициентом сцепления, имеющих всегда меньшую весовую нагрузку в сравнении с “забегающими”. В этом случае полная блокировка МКД в сравнении с основным и дополнительным режимами самоблокировка, благодаря снижению буксования, более экономична и обеспечивает более высокую действительную скорость движения. При этом абсолютная величина ΔМоз возрастает, что при отрицательном знаке ее вызывает либо снижение действующего в горизонтальной плоскости момента сопротивления повороту АТС, либо изменение его знака. В обоих случаях радиус поворота снижается.
При изменении знака Δωзо, которое происходит одновременно с изменением знака блокирующего момента ΔМоз передних колес, и уменьшении Δωзо до Δωзо=Δωmin SΔω0=1 (в канале VIII) и вне зависимости от отрицательного значения ΔМоз и величины сигнала SΔМ на выходе звена “V” - u2=1 (фиг.12). В этом случае U2=1, включается постоянно разомкнутое реле К2, на обмотку соленоидов C31 и C32 подается напряжение и включаются золотники - 112 полной блокировки (фиг.6 и 7). В этом случае возможна “избыточная” поворачиваемость АТС, связанная со смещением полюса поворота к оси передних колес и возникновением либо отрицательных углов бокового увода передних колес, либо бокового скольжения задних колес. Поэтому при указанном включении полной блокировки МКДС предусмотрено включение сигнальной лампы Л2 желтого цвета. Водитель получает предупреждающий сигнал на снижение заданной скорости движения V0.
При увеличении ΔМоз в канале VII и на выходе звена “V” сохраняется сигнал “1” до тех пор, пока ΔМоз не достигнет порогового значения ΔМоз=ΔМ0 (SΔМ=0) и при Δωзо>Δωmin (SΔω0=0) на выходе звена “V” u2=0. При U2=0 - золотники - 112 полной блокировки под действием возвратных пружин выключаются, возвращаясь в исходное (“постоянно открытое”) положение. И в зависимости от заданной величины |θ| включается либо дополнительный, либо основной режим самоблокировки.
При внедорожном непрямолинейном движении в случае одинакового, но пониженного сцеплении “отстающих” и “забегающих” колес, например при движении по сухому песку, чтобы уменьшить тяговую нагрузку и буксование “отстающих” колес, весовая нагрузка которых при повороте снижается, целесообразно заменить основной режим самоблокировки на дополнительный режим с более мягкой характеристикой самоблокировки и при малых значениях |θ|<θ0 угла поворота передних колес. Для этого реле К1 (фиг.13) САУ режимами блокировки МКДС дублируется кнопкой Ку1 ручного принудительного включения (отключения) дополнительного режима самоблокировки. При этом включается сигнальная лампа Л1 зеленого цвета.
Таким образом, предлагаемая трансмиссия с гидравлическими межосевой и межколесными дифференциальными связями, обеспечиваемыми суммирующими планетарными механизмами в колесных редукторах и нерегулируемыми гидробъемными передачами с невращающимися корпусами гидромашин, в сравнении с известными устройствами обеспечивает значительное снижение объемных потерь энергии в гидравлической системе и более приспособлена для автоматизации режимов блокировки дифференциальных связей. Предлагаемая система автоматического управления этими режимами позволяет гибко и более рационально в сравнении с применяемыми самоблокирующимися дифференциалами распределять крутящие моменты на “забегающих” и “отстающих” колесах при различном соотношении их коэффициентов сцепления и за счет снижения буксования, прежде всего, “отстающих” колес повысить проходимость и экономичность полноприводного АТС в условиях непрямолинейного внедорожного движения. Ступенчатое изменение жесткости характеристики самоблокировки позволяет снизить боковой увод передних управляемых колес и повысить маневренность движения. Снижение жесткости силовой передачи более нагруженных колес переднего и заднего ведущих мостов за счет включения гидропневматических аккумуляторов с демпфирующими дросселями в нагнетательные магистрали уменьшает цикличность и пиковые значения тяговой нагрузки ведущих колес, что повышает ресурс и надежность трансмиссии и расширяет возможность использования в сложных условиях движения полной блокировки дифференциальных связей. Предлагаемая система двухнасосной подпитки всасывающих полостей гидромашин и магистралей низкого давления создает возможность без применения автоматических муфт в ступицах колес при полной блокировке и малых радиусах поворота АТС автоматически отключать привод “забегающих” колес для повышения экономичности работы. Замена в трансмиссии полноприводного колесного АТС шестеренных дифференциалов (конических межколесных и цилиндрических межосевых дифференциалов) на однорядные планетарные механизмы, размещаемых в колесных несоосных редукторах портальных ведущих мостов, существенно сокращает номенклатуру используемых деталей и упрощает конструкцию раздаточной коробки при 4к4 (или раздаточных коробок при 6к6, 8к8).
Источники информации
1. Андреев А.Ф. и др. Дифференциалы колесных машин. М., изд-во “Машиностроение”, 1987 (стр.50, 85-86).
2. Lowell J. Differential speed-sensitive and torque-sensitive limited slip coupling. US Patent 5,938,556, F16H 48/26, 17.08.1999.
3. Schrand E. Limited slip differential with integrated solenoid valve and plenum. US Patent 6,902,506 B2, F16H 48/20, 07.06.2005.
4. Нарбутовских И.Г. Дифференциал управляемый радиально-поршневой. RU Патент 2238460 C2, F16H 48/26, 04.02.2003.
5. Duan X. Differential device. US Patent 6,544,13682, F16H 48/30, 08.04.2003.
Изобретение относится к области транспортного машиностроения и может быть использовано при разработке трансмиссии для колесных АТС повышенной проходимости. Трансмиссия с ведущими мостами портального типа с жесткой кинематической связью всех четырех полуосей и вторичного вала коробки передач, колесными несоосными редукторами с однорядными выходными планетарными механизмами, ведущие коронные шестерни которых кинематически связаны с полуосями мостов, а солнечные шестерни - с валами гидромашин, корпуса которых жестко соединены с корпусами колесных редукторов. Рабочие полости гидромашин каждого ведущего моста соединены посредством золотников реверса с магистралями высокого и низкого в тяговом режиме давления с системой подпитки. В магистрали высокого давления включены гидравлические блокирующие дроссельные механизмы со ступенчатым изменением гидравлического сопротивления. При этом самоблокировка САУ режимами блокировки при повороте АТС зависит от угла поворота, разности частоты вращения и крутящих моментов передних управляемых колес, что обеспечивает включение одного из двух указанных режимов самоблокировки или полной блокировки межколесных дифференциальных связей. В эти же магистрали включены избирательные клапаны, соединяющие нагнетательные полости более нагруженных гидромашин передних и задних колес с межосевой магистралью высокого давления с электроуправляемым гидравлическим двухрежимным блокирующим механизмом. Достигается повышение маневренности, проходимости и экономичности работы АТС. 10 з.п. ф-лы, 13 ил.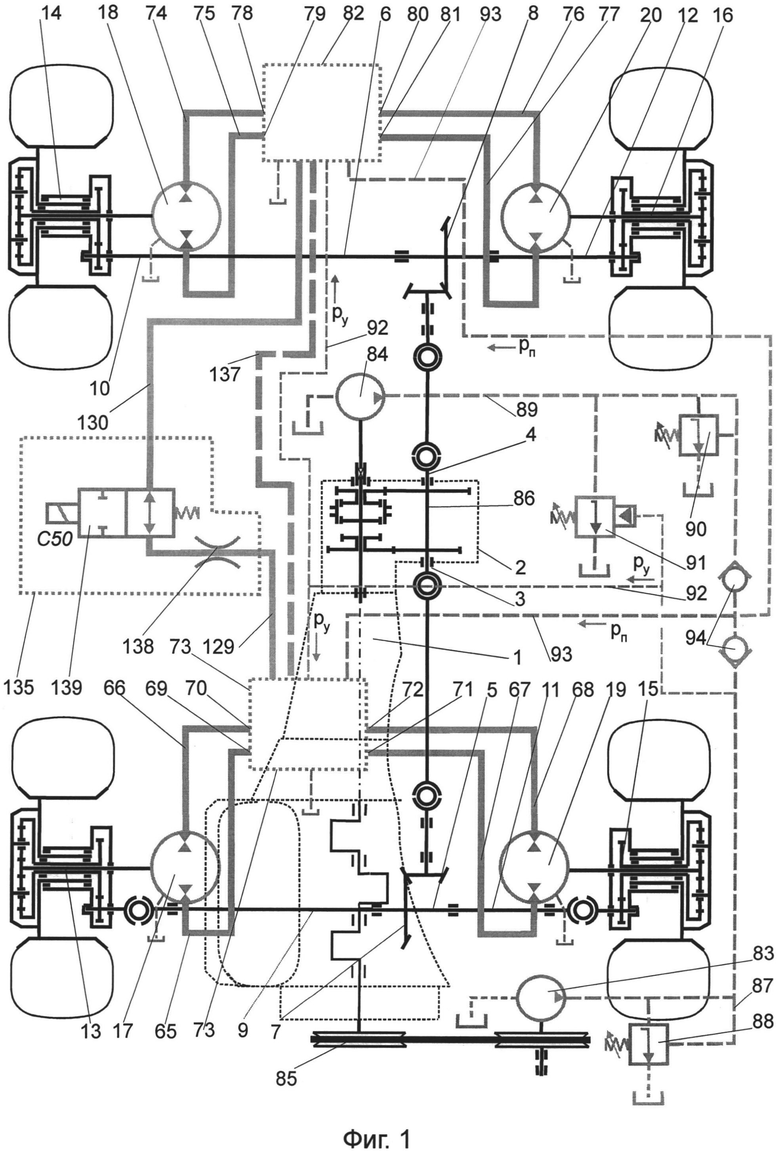
1. Трансмиссия с гидравлическими межосевой и межколесными дифференциальными связями с автоматически управляемыми режимами блокировки для автотранспортного средства (АТС) повышенной проходимости, предназначенного преимущественно для внедорожного движения, включающая КПП с датчиком включения задней передачи, раздаточную двухступенчатую коробку с передним и задним выходом и ведущие мосты портального типа с главными передачами, полуосями и колесными несоосными редукторами с входными цилиндрическими парами, ведущие шестерни которых соединены с полуосями и кинематически связаны с ведомой шестерней главной передачи соответствующего ведущего моста, и выходными однорядными планетарными механизмами, водила которых связаны со ступицами ведущих колес, с объемными обратимыми нерегулируемыми гидромашинами, встроенными в качестве силовых передаточных звеньев между ведомыми шестернями главных передач и ведущими колесами, и нагнетательные полости которых соединены между собой соответствующими соединительными магистралями, снабженными электроуправляемыми золотниками блокировки нагнетательных полостей гидромашин, двухпозиционными электроуправляемыми от датчика включения передачи заднего хода золотниками реверса, перепускными клапанами и блокирующими дросселями, а также с датчиками поворота управляемых колес, датчиками частоты вращения колес, датчиками положения тормозной педали и перемещения педали акселератора, электронным блоком управления, отличающаяся тем, что в целях повышения маневренности, проходимости и экономичности АТС, снижения динамической нагруженности силовой передачи в условиях внедорожного движения, обеспечения необходимой маневренности и возможности запуска двигателя при буксировке АТС, полуоси каждого ведущего моста жестко связаны между собой и с ведомой шестерней главной передачи, ведомые шестерни входных цилиндрических пар колесных редукторов - с коронными шестернями упомянутых планетарных механизмов, а солнечные шестерни последних - с валами гидромашин, например радиально-плунжерных, при этом корпуса последних жестко закреплены на корпусах соответствующих колесных редукторов, а всасывающие рабочие полости гидромашин каждого ведущего моста в тяговом режиме через упомянутые выше золотники реверса соединены между собой магистралью низкого давления, в которую включен блок автоматического гидравлического управления блокировкой межколесной дифференциальной связи (МКДС) при отрицательных крутящих моментах колес АТС, содержащий два гидроуправляемых золотника ″постоянно открытого″ и ″постоянно закрытого″, и снабжены системой подпитки, а нагнетательные полости гидромашин соединены в тяговом режиме колес с входами блока электрогидравлического управления режимами блокировки межколесной дифференциальной связи (МКДС), включающим гидроуправляемый золотник разблокировки, гидравлический блокирующий механизм с электроуправляемым ступенчатым изменением гидравлического сопротивления и электроуправляемым золотником полной блокировки, являющихся исполнительными механизмами системы автоматического управления (САУ) режимами блокировки МКДС при повороте АТС, дублируемой кнопкой ручного управления полной блокировкой трансмиссии, и обеспечивающей использование в зависимости от углов поворота, разности частоты вращения и крутящих моментов передних управляемых колес либо одного из двух режимов самоблокировки, основного при большом гидравлическом сопротивлении блокирующего дросселя и дополнительного режима - при малом его гидравлическом сопротивлении, либо полной блокировки, а также с соответствующими входными торцевыми полостями гидроуправляемого трехпозиционного и снабженного центрирующими пружинами избирательного клапана с положительным перекрытием выходной полости относительно входных при его нейтральном положении, при этом выходные полости избирательных клапанов, соединенные с гидравлическими демпферами, и магистрали низкого давления гидравлических систем ведущих мостов снабжены соответствующими межосевыми гидравлическими связями, а передний и задний выходы раздаточной коробки жестко соединены между собой.
2. Трансмиссия по п.1, отличающаяся тем, что гидравлические межосевые связи указанных в п.1 магистралей гидравлических систем ведущих мостов обеспечиваются для магистралей низкого давления посредством параллельного соединения выходов упомянутых в п.1 блоков автоматического гидравлического управления режимами блокировки МКДС ведущих мостов с общей межосевой магистралью низкого в тяговом режиме ведущих мостов давления, а для магистралей высокого давления - выходных полостей упомянутых в п.1 избирательных клапанов с общей межосевой магистралью высокого в тяговом режиме ведущих мостов давления, причем в независимости от количества ведущих мостов в трансмиссии выходная полость избирательного клапана заднего моста соединена с общей межосевой магистралью напрямую, а для остальных впереди расположенных ведущих мостов - через электроуправляемые гидравлические двухрежимные блокирующие механизмы межосевой дифференциальной связи (МОДС), содержащие последовательно соединенные дроссель с большим гидравлическим сопротивлением и двухпозиционный ″постоянно открытый″ электроуправляемый золотник, цепь питания управляющего соленоида которого содержит постоянно разомкнутые контакты упомянутой в п.1 ручной кнопки управления полной блокировкой трансмиссии.
3. Трансмиссия по п.1, отличающаяся тем, что система автоматического управления (САУ) режимами блокировки межколесных дифференциальных связей при повороте АТС содержит электронный вычислительный блок, в котором на основе измерения частоты вращения всех колес, углов поворота и давления рабочей жидкости в нагнетательных полостях гидромашин передних управляемых колес вычисляется заданная теоретическая скорость движения, текущие значения разности частоты вращения "забегающего" и "отстающего" колеса для передней и для задней оси, абсолютная величина расчетного угла поворота и разность крутящих моментов "отстающего" и "забегающего" передних управляемых колес, верхнее положительное для отключения дополнительного режима самоблокировки и нижнее отрицательное для включения режима полной блокировки пороговые значения разности частоты вращения передних управляемых колес, заданных в виде функций текущих значений расчетного угла поворота управляемых колес и теоретической скорости движения, а в электронном блоке управления САУ, снабженном соответствующими релейными и логическими звеньями, на основе сравнения текущих значений разности частоты вращения, крутящих моментов и расчетного угла поворота передних управляемых колес с их соответствующими вычисленными и заданными пороговыми значениями определяются положительные или отрицательные отклонения этих параметров в виде аналоговых сигналов, которые преобразуются в цифровые сигналы, и на основе которых с помощью логических операций формируются управляющие команды: u1 для дополнительного режима и u2 для полной блокировки, которые после усиления поступают в упомянутые в п.1 исполнительные механизмы в виде сигналов U1 и U2, при этом включение и отключение трех указанных в п.1 режимов блокировки МКДС обеспечивается при соблюдении следующих условий: основной режим самоблокировки включен при U2=0 и U1=0; отключен при U1=1 или U2=1; дополнительный режим самоблокировки включен при U2=0 и θ1≤θ≤θ1+δθ, отключен при θ=θ0 или Δω30=Δωmax или Δω30=Δωmin; полная блокировка включена при Δω30=Δωmin, отключена при ΔМ03=ΔМ0.
4. Трансмиссия по п.1, отличающаяся тем, что система подпитки содержит два гидронасоса, один из которых кинематически связан с коленчатым валом первичного двигателя АТС, а второй - с вторичным валом КПП, нагнетательные магистрали насосов с помощью выпускных обратных клапанов соединены с магистралью подпитки и давление в которых ограничивается индивидуальными одинаково отрегулированными перепускными клапанами, при этом нагнетательная магистраль первого гидронасоса соединена с магистралью управления, по которой рабочая жидкость подводится к управляющей полости гидроуправляемого клапана разгрузки, установленного в нагнетательной магистрали второго гидронасоса и соединяющего нагнетательную и всасывающую магистраль второго гидронасоса, если управляющее давление достигает заданного уровня.
5. Трансмиссия по п.1, отличающаяся тем, что с целью снижения динамической нагруженности трансмиссии, прежде всего в режиме полной блокировки, упомянутые в п.1 гидравлический демпфер содержит последовательно соединенные дроссель и пневмогидроаккумулятор.
6. Трансмиссия по п.1 или 4, отличающаяся тем, что вышеупомянутый гидравлический блок автоматического управления блокировкой МКДС при отрицательных крутящих моментах колес АТС снабжен двумя входными каналами, соединенными магистралями низкого для тягового режима колес давления с соответствующими полостями правой и левой гидромашин, а упомянутые в п.1 гидроуправляемые ″постоянно открытый″ и ″постоянно закрытый″ золотники выполнены подпружиненными и двухпозиционными, с двумя входными и одной выходной полостями, при этом соответствующие полости соединены между собой и с входными каналами блока управления, торцевая полость ″постоянно открытого″ золотника с пружиной, отрегулированной на давление 0.1…0.15 от максимального значения, посредством двух впускных обратных клапана соединена с входными каналами блока управления, а торцевая полость ″постоянно закрытого″ золотника - с упомянутой в п.4 магистралью управления.
7. Трансмиссия по п.1, отличающаяся тем, что цепь питания соленоидов электроуправляемых золотников реверса переднего и заднего ведущих мостов содержит параллельную ветвь с постоянно разомкнутым реле, в управляющую обмотку которого включен датчик положения тормозной педали.
8. Трансмиссия по п.1 или 3, отличающаяся тем, что вышеупомянутый электрогидравлический блок управления режимами блокировки МКДС каждого ведущего моста в тяговом режиме снабжен правым и левым входными каналами, соединенными с нагнетательными для тягового режима ведущего моста магистралями правой и левой гидромашин, а посредством двух впускных обратных клапанов и двух выпускных обратных клапанов связаны соответственно с входами и выходами упомянутых в п.1 гидроуправляемого золотника разблокировки, выполненного двухпозиционным и ″постоянно закрытым″ с управляющей торцевой полостью, соединенной с магистралью низкого для тягового режима ведущего моста давления, и гидравлического блокирующего механизма, снабженного последовательно соединенными упомянутым в п.1 двухпозиционным ″постоянно открытым″ электроуправляемым золотником полной блокировки, цепь питания управляющего соленоида которого содержит параллельно включенные постоянно разомкнутые контакты реле с управляющим сигналом U2 и упомянутой в п.1 ручной кнопки управления, и блокирующим дросселем, состоящим из двух секций с неодинаковым гидравлическим сопротивлением: постоянно включенной секции с малым гидравлическим сопротивлением и секции с большим гидравлическим сопротивлением, отключаемой посредством двухпозиционного, ″постоянно закрытого″, электроуправляемого с помощью постоянно разомкнутого реле и сигнала U1 золотника, соединяющего в выключенном положении вход и выход секции блокирующего дросселя с большим гидравлическим сопротивлением.
9. Трансмиссия по п.3, отличающаяся тем, для включения САУ и определения ″забегающих″ и ″отстающих″ колес при повороте АТС электронный вычислительный блок снабжен релейным звеном с зоной нечувствительности Δθ, соответствующей диапазону изменения θ при движения с радиусами поворота не менее 120…150 м, на вход которого поступает вычисленное в этом блоке текущее значение θ расчетной величины угла поворота передних колес, при этом в случае |θ|<Δθ - Sθ=0 и САУ выключена, при |θ|≥Δθ - Sθ=1 и левые колеса - ″отстающие″, а при |θ|≤-Δθ - Sθ=-1 и левые колеса - ″забегающие″.
10. Трансмиссия по п.3, отличающаяся тем, что для обеспечения заданного условия θ1≤θ≤θ1+δθ включения дополнительного режима самоблокировки электронный блок управления снабжен двумя релейными звеньями с общим входным аналоговым сигналом Δθ1 отклонения угла поворота управляемых колес от верхнего порогового значения и с выходными цифровыми сигналами: SΔθ1 и его инверсией - S-Δθ1, причем последний имеет задержку δθ=0.5…1.0° относительно сигнала SΔθ1.
11. Трансмиссия по п.8, отличающаяся тем, что коэффициент сопротивления постоянно включенной секции блокирующего дросселя, обеспечивающей дополнительный режим самоблокировки МКДС с ″пологой″ характеристикой в 5…6 раз меньше суммарного коэффициента сопротивления постоянно включенной и отключаемой секции блокирующего дросселя, обеспечивающих основной режим самоблокировки МКДС с ″крутой″ характеристикой.
| ДИФФЕРЕНЦИАЛ УПРАВЛЯЕМЫЙ РАДИАЛЬНО-ПОРШНЕВОЙ | 2002 |
|
RU2238460C2 |
| Объемная гидравлическая трансмиссия самоходной машины | 1982 |
|
SU1031806A1 |
| Транспортное средство с гидроприводом направляющих колес | 1981 |
|
SU1035909A1 |
| Устройство для защиты от поражения электрическим током | 1971 |
|
SU450282A1 |
| DE 4206086 A1, 02.09.1993 | |||

