Изобретение относится к области наземного транспорта, конкретно к гусеничным движителям транспортных средств, главным образом длиннобазовых гусеничных тягачей и вездеходов для тундровых районов.
Решение проблемы проходимости тяговых и транспортных машин вступило в стадию создания экологичных транспортных средств, в том числе машин с металлическими, ленточными, пневматическими, секционными гусеницами и гусеницами, имеющими упругие траки (Вержбицкий А.Н., Плиев И.А., Наумов В.Н. Обоснование выбора типа экологичного движителя для машин высокой проходимости// Автомобильная промышленность, 1998, N 11. -С. 11-14).
Одним из возможных способов поворота гусеничной машины, оказывающими меньшее, в сравнении с "классическим" бортовым способом, разрушающее воздействие на почвенно-растительный покров, является управление изгибанием гусениц в горизонтальной плоскости (в плане). При таком способе гибкая в поперечном направлении гусеница укладывается на грунт по кривой; управление опорными катками осуществляют при помощи обычного рулевого колеса через реечную передачу и индивидуальные тяги или от штурвала при помощи гидросистемы (Вонг Дж. Теория наземных транспортных средств: Пер. с англ.- М.: Машиностроение, 1982.- С.213-214; L.F.Little. The Alecto Tracklayer// Journal of Terramechanics, 1964, Vol. 1, No 2 . Бронетанковая техника: Фотоальбом.-М.: Гончаръ. Poligon, 1994.-С.159).
При этом, естественно, невозможно использовать наиболее распространенные, отлично зарекомендовавшие себя звенчатые гусеницы с открытым металлическим или резино-металлическим шарнирами - ОМШ и РМШ соответственно (Расчет и конструирование пшеничных машин/ Под ред. проф. Н.А. Носова.- Л.: Машиностроение, 1972, С.495, 500).
Наиболее близким к предложенному по назначению способу использования и совокупности существенных конструктивных признаков является экологичный гусеничный движитель транспортного средства, а именно - легкого английского танка Мк VII "Тетрарх" (выбран за наиболее близкий аналог), содержащий изгибающиеся в горизонтальной плоскости (в плане) гусеницы с взаимосвязанными, посредством горизонтальных поперечных шарниров, жесткими траками с направляющими гребнями, охватывающие ведущие и направляющие колеса и, по крайней мере, опорные катки, установленные с возможностью поворота их осей по азимуту вокруг центра кинематического поворота транспортного средства посредством рулевого привода (Бах И.В., Вараксин Ю.Н., Выгодский С.Ю. Зарубежная бронетанковая техника: Справочник в двух книгах. - Кн.1.-М.: Машиностроение, 1984, С.165-166).
В нем траки прикреплены к замкнутой изгибающейся трубе (как основе гусеницы), каждый трак снабжен парой разнесенных по его ширине направляющих гребней, опорные катки установлены с возможностью наклона осей в плане и под определенным углом к вертикали так, что движение вокруг этих осей катков перемещает нижнюю часть колес с изгибанием гусеницы. Управление опорными катками осуществляется при помощи штурвала через гидросистему.
Однако, в известном движителе поперечная гибкость гусеницы ограничена. Соответственно, ограничен и минимальный радиус кинематического поворота машины. При этом велики потребные усилия в устройстве поворота осей катков, а упругие деформации гусеницы снижают их долговечность. Кроме того, движитель имеет повышенную склонность к сбросу гусениц; велика неравномерность распределения давления в пятне контакта гусеницы с грунтом в повороте; весьма неблагоприятен контакт в зоне перехода от следа движителя к нетронутой поверхности почвы.
Задачей, на решение которой направлено данное изобретение, является улучшение усилий реализации способа поворота гусеничной машины с изгибанием гусениц в горизонтальной плоскости, повышение маневренности, надежности, срока службы, экономичности и экологических свойств гусениц и движителя в целом.
Решение поставленной задачи обеспечивается тем, что в экологичном гусеничном движителе транспортного средства, содержащем изгибающиеся в горизонтальной плоскости (в плане) гусеницы с взаимосвязанными, посредством горизонтальных поперечных шарниров, жесткими траками с направляющими гребнями, охватывающие ведущие и направляющие колеса и, по крайней мере, опорные катки, установленные с возможностью поворота их осей по азимуту вокруг центра кинематического поворота транспортного средства посредством рулевого привода, каждый трак состоит из двух оппозитно расположенных по длине гусеницы частей с клиновыми скосами супротивных торцов, при этом части трака соединены друг с другом вертикальным шарниром, расположенным в центре трака и конструктивно объединенным с направляющим гребнем.
Решение задачи достигается также тем, что в гусеницах вертикальные шарниры выполнены ступенчато-пирамидальными, с максимальным диаметром в основании направляющего гребня, на уровне горизонтальных поперечных шарниров, а также тем, что колеса поодиночке и катки, по крайней мере, попарно установлены на каретках, при этом каретки связаны с рулевым приводом.
Среди выявленных аналогов не обнаружены гусеничные движители, совокупность существенных признаков которых совпадала бы с заявленной.
В то же время, именно за счет заявленной совокупности существенных признаков устройства достигается положительный эффект в соответствии с поставленной задачей.
Составная конструкция трака гусеницы со свободой поворота (на вертикальном шарнире) его частей друг относительно друга в горизонтальной плоскости, в сочетании с другими признаками независимого пункта формулы изобретения позволяет улучшить условия реализации способа поворота с изгибанием гусениц в горизонтальной плоскости, сократить минимальный радиус кинематического поворота, обеспечить изгиб гусениц без их упругих деформаций и "выворачивания" в вертикальных плоскостях, сохранить достаточно равномерные эпюры распределения давлений на грунт по ширине трака. При этом организация вертикального шарнира в теле направляющего гребня обусловливает компактность устройства, высокий коэффициент использования массы и объема звеньев гусениц.
Дополнительные признаки предложенного устройства, сформулированные в п. п. 2, 3 формулы изобретения, необязательны для решения поставленной задачи. Однако они усиливают положительный эффект от использования изобретения, т.к. являются более рациональными техническими решениями в рамках п.1 формулы. Так, ступенчато-пирамидальная конфигурация вертикального шарнира (пальца и отверстий под него в проушинах частей трака) обеспечивает ступенчатую конусность эпюры распределения тангенциальных (тяговых) усилий в гусенице по длине вертикального шарнира, восприятие максимальной нагрузки, соответственно, максимальным сечением шарнира; звенчатая конструкция подвески колес и катков (каретки, взаимосвязанные вертикальными шарнирами), обеспечивает симметрию, облегчает организацию рулевого привода.
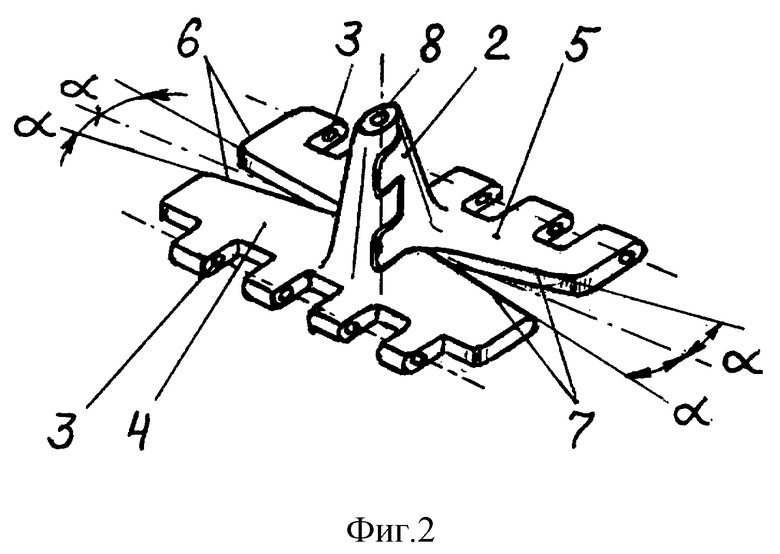
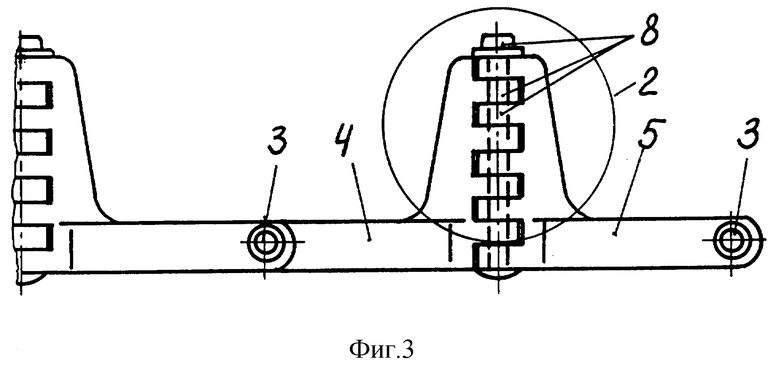
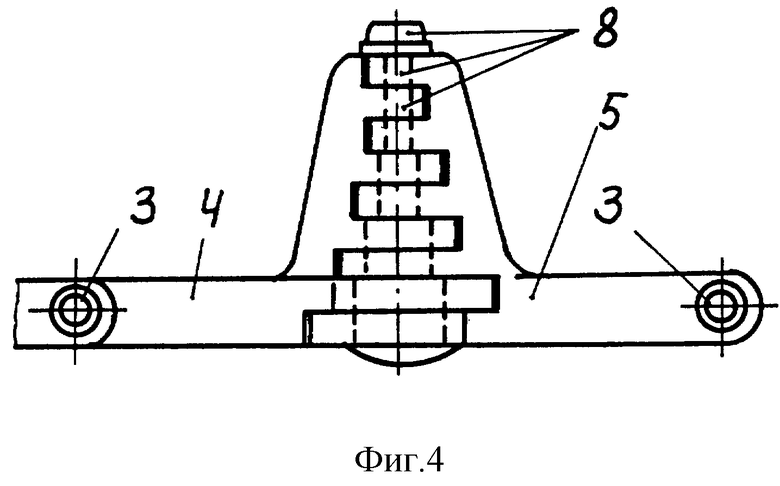
На фиг. 1 показан пример конструктивного исполнения предложенного экологичного гусеничного движителя транспортного средства, вид сбоку; на фиг. 2 - конструкция трака (звена гусеницы), в аксонометрии; на фиг. 3 - два смежных трака, вид сбоку в разрезе, вариант с цилиндрическим вертикальным шарниром; на фиг. 4 - то же, вариант со ступенчато-пирамидальным вертикальным шарниром; на фиг.5 - схема кинематического поворота.
Экологичный гусеничный движитель транспортного средства содержит изгибающиеся в горизонтальной плоскости гусеницы в виде цепей из жестких (недеформируемых) звеньев-траков 1 (см. фиг. 1) с направляющими гребнями 2 (см. фиг. 3), соединенных друг с другом горизонтальными поперечными шарнирами 3 (ОМШ, как показано на иллюстрациях, или РМШ). Каждый трак 1 включает в себя две оппозитно расположенные по длине гусеницы части 4 и 5 с клиновыми скосами 6, 7 супротивных торцов под углом α (см. фиг. 2). Удвоенное значение угла α не должно быть менее максимального угла расхождения осей смежных шарниров 3 при минимальном расчетном радиусе изгиба гусеницы (см. фиг. 5), что обеспечивает неограниченную возможность взаимного поворота частей 4, 5 во всем диапазоне расчетных радиусов кинематического поворота транспортного средства, начиная с Rmin. Это может быть выражено математически соотношением:
αmin = 0,5•1/Rmin,
где l - длина трака 1 (расстояние между осями смежных шарниров 3).
Направляющий гребень 2 также выполнен составным, в виде вертикального шарнира 8 (ОМШ, как показано на иллюстрациях, или РМШ). Иными словами, шарнир 8 и гребень 2 конструктивно объединены или, иначе, шарнир встроен в гребень. При этом шарнир 8 может быть выполнен как цилиндрическим (см. фиг. 3), так и ступенчато-пирамидальным (см. фиг. 4), с максимальным диаметром в основании направляющего гребня 2, на уровне горизонтальных шарниров 3.
Каждая гусеница охватывает (с натяжением) колеса 9, 10 (ведущее и направляющее) и катки 11, 12 (опорные и поддерживающие, причем последние могут, в принципе, отсутствовать). Колеса 9, 10 и катки 11, 12 установлены на раме или корпусе транспортного средства с возможностью поворота их осей по азимуту вокруг центра кинематического поворота транспортного средства (точка 0 на фиг. 5). Величины этих углов являются функциями радиуса поворота R и, соответственно, радиусов кривизны гусениц забегающего и отстающего бортов. При этом векторы линейных скоростей вращения колес 9, 10 и катков 11, 12 направлены по касательным к дуге радиуса R, образованной осями шарниров 8. Указанный поворот осей колес и катков обеспечивается их связью с рулевым приводом. Конструктивная реализация этой связи принципиально не отличается от известных устройств поворота колес (тяги, гидроцилиндры и т.д.) и поэтому графически не представлены.
В преимущественном варианте исполнения устройства колеса 9, 10 поодиночке и катки 11, 12 (или только опорные катки 11 при отсутствии поддерживающих катков 12), по крайней мере, попарно установлены на каретках 13, 14, 15 соответственно, которые взаимосвязаны, посредством вертикальных шарниров 16-20, и связаны с рулевым приводом, обеспечивающим их поворот по азимуту, в соответствии с потребными углами поворота колес 9, 10 и катков 11, 12.
Описанные примеры не исключают других возможных вариантов конкретного конструктивного выполнения предложенного устройства в рамках заявленной совокупности существенных признаков.
Устройство работает следующим образом.
Для осуществления поворота транспортного средства кинематическим способом с изгибанием гусениц в горизонтальной плоскости (в плане) каретки 13-15 синхронно поворачивают, посредством рулевого приводя, в положение, при котором оси закрепленных на каретках колес 9, 10 и катков 11, 12 поворачиваются по азимуту (т.е. в горизонтальной плоскости) и устанавливаются по нормалям к расчетным дуговым траекториям гусениц отстающего и забегающего бортов (см. фиг. 5). За счет натяжения гусениц и взаимодействия направляющих гребней 2 траков 1 с внутренними торцами колес 9, 10 и катков 11, 12 части 4, 5 траков поворачиваются друг относительно друга в горизонтальной плоскости на шарнирах 8, вследствие чего гусеницы изгибаются в горизонтальной плоскости (в плане) по указанным дуговым траекториям. Благодаря наличию скосов 6, 7 взаимный поворот частей 4, 5 не ограничен в пределах угла 2α. Изгиб гусениц в вертикальной плоскости не отличается от изгиба известиях звенчатых (цепных) гусениц с ОМШ и РМШ.
Наиболее вероятна реализация кинематического поворота с минимальным радиусом порядка 6 м.
Тангенциальные (тяговые) усилия в гусеницах воспринимаются, в основном, основаниями шарниров 8. При выполнении последнего ступенчато-пирамидальным максимум усилия приходится на больший диаметр пальца шарнира 8 и напряжения распределяются по высоте шарнира равномернее.
Использование изобретения позволяет улучшить условия реализации способа поворота гусеничной машины с изгибанием гусениц в горизонтальной плоскости, повысить маневренность, надежность, срок службы, экономичность и экологические свойства гусениц и движителя в целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГУСЕНИЧНАЯ ЦЕПЬ ХОДОВОЙ ЧАСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2385815C1 |
| ГУСЕНИЧНАЯ ЦЕПЬ ХОДОВОЙ ЧАСТИ СНЕГОБОЛОТОХОДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2538650C1 |
| ДВИЖИТЕЛЬ ГУСЕНИЧНОЙ МАШИНЫ | 2022 |
|
RU2790731C1 |
| Гусеница с резинометаллическим шарниром параллельного типа и цевочным зацеплением с ведущим колесом | 2021 |
|
RU2761974C1 |
| ЭЛАСТИЧНАЯ ГУСЕНИЦА ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2446975C1 |
| Сборное звено гусеничной цепи | 2020 |
|
RU2749744C1 |
| РЕЗИНОМЕТАЛЛИЧЕСКАЯ ГУСЕНИЦА | 2015 |
|
RU2581105C1 |
| ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2000 |
|
RU2177422C1 |
| ДВИЖИТЕЛЬ ГУСЕНИЧНОЙ МАШИНЫ | 2006 |
|
RU2340506C2 |
| КОЛЁСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДА | 2013 |
|
RU2542220C1 |

Использование: гусеничные транспортные средства. Сущность изобретения: экологичный гусеничный движитель транспортного средства, преимущественно длиннобазового, содержит изгибающиеся в горизонтальной плоскости (в плане) звенчатые гусеницы, составленные из жестких траков с центрально расположенными направляющими гребнями. Траки соединены друг с другом посредством горизонтальных поперечных шарниров. Трак включает в себя две оппозитно расположенные по длине гусеницы части с клиновыми скосами супротивных торцов. Направляющий гребень также выполнен составным в виде вертикального шарнира. Последний имеет предпочтительно ступенчато-пирамидальную форму. Гусеницы охватывают колеса и катки, которые установлены с возможностью поворота их осей по азимуту вокруг центра кинематического поворота транспортного средства. Вариант устройства предусматривает установку колес поодиночке и катков, по крайней мере, попарно на каретках, взаимосвязанных посредством вертикальных шарниров и связанных с рулевым приводом. Использование изобретения позволяет улучшить условия реализации способа поворота гусеничной машины с изгибанием гусениц в горизонтальной плоскости, повысить маневренность, надежность, срок службы, экономичность и экологические свойства гусениц и движителя в целом. 2 з.п. ф-лы, 5 ил.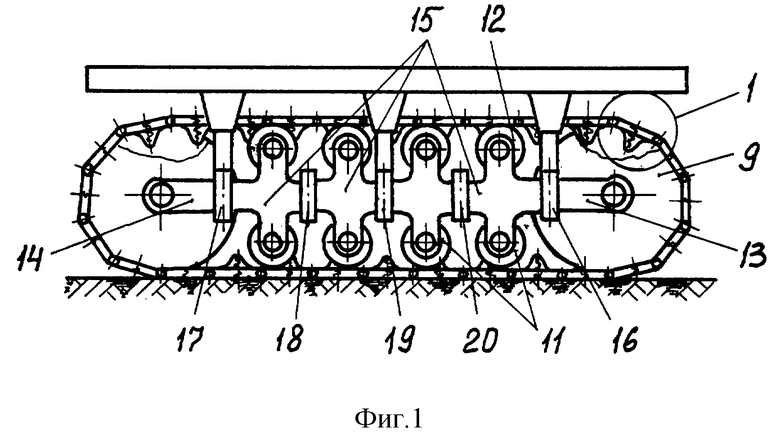
| Бах И.В., Вараксин Ю.Н., Выгодский С.Ю | |||
| Зарубежная бронетанковая техника: Справочник в двух книгах | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для отыскания металлических предметов | 1920 |
|
SU165A1 |
| RU 94006464 A, 20.03.1996 | |||
| Гусеничный движитель для одноколейного транспортного средства | 1984 |
|
SU1234272A1 |
| Гусеничная цепь транспортного средства | 1985 |
|
SU1320113A1 |
| ПРЕПАРАТ ДЛЯ БОРЬБЫ С ЛИЧИНКАМИ КРОВОСОСУЩИХ КОМАРОВ | 1994 |
|
RU2077203C1 |
| Фрикционная передача | 1960 |
|
SU134531A1 |
| УСТРОЙСТВО КОРРЕКЦИИ ТРАЕКТОРИИ ДВИЖЕНИЯ РЕЖУЩЕГО ИНСТРУМЕНТАI::,.;. И"НО-ТЕХНН4Г ! ЬИЕ.Г)ИОТЕН/ | 0 |
|
SU319388A1 |
