Изобретение относится к вертолетостроению, а именно к конструкциям несущего винта, позволяющим существенно увеличить горизонтальную скорость полета.
Известен несущий винт малоразмерного беспилотного вертолета, включающий втулку, осевые шарниры, на которых установлены лопасти винта, и прямоточные двигатели, установленные на концах лопастей [пат. США N 5297759, кл. B 64 C 27/00, опубл. 1994 г.].
Недостатками известного технического решения являются ограниченная максимальная горизонтальная скорость вертолета и практически невозможность применения прямоточных двигателей на лопастях вертолета из-за значительной разницы скоростных напоров между режимами, когда двигатель идет против полета (вперед) и когда двигатель идет по полету (назад), двигатель глохнет, т.к. имеет ограничение по минимальному скоростному напору при скоростях V≤70:90 м/с.
Наиболее близким техническим решением к предложенному является несущий винт вертолета, входящий в силовую установку вертолета по патенту РФ N 2061626, кл. B 64 C 27/605, опубл. 10.06.1996 г. Установка содержит несущий винт с шарнирно установленными в укрепленных на валу втулках лопастями, снабженными поводками для изменения угла атаки, автомат перекоса с наружным кольцом, движок изменения общего шага, взаимодействующий вместе с неподвижным кольцом с блоком управления, гироскопический стабилизатор с укрепленными на радиальных штангах лопатками, связанный с поводком лопастей. Гироскопический стабилизатор размещен над винтом, соединен с концом вала карданным шарниром, штанги лопаток установлены с возможностью поворота и снабжены поводками, связанными шарнирными тягами с наружным кольцом автомата перекоса, а на поводках лопастей установлены двуплечие суммирующие качалки, одно из плеч которых соединено шарнирной тягой с гироскопическим стабилизатором, а другое - с движком изменения общего шага.
Неравномерный по окружности поворот лопаток приводит к возникновению момента аэродинамических сил, поворачивающих гироскопический стабилизатор на определенный угол вокруг горизонтальной оси. При повороте стабилизатора с помощью тяг поворачиваются неодинаковые углы лопасти. Таким образом, происходит регулирование циклического шага лопастей, т.е. изменяется направление вектора тяги несущего винта вертолета.
В случае поворота вертолета в пространстве под действием внешних возмущений (например, порыва ветра), изменения положения центра масс фюзеляжа и т. п. вместе с летательным аппаратом поворачивается ось несущего винта. В то же время возникающий парирующий гироскопический момент стремиться возвратить стабилизатор в первоначальное положение. В результате между плоскостями несущего винта и стабилизатора создается определенный угол наклона, что приводит к соответствующему изменению циклического шага и возникновению на несущем винте момента, парирующего аппарат в исходное положение.
Известное техническое решение обеспечивает автоматически стабильность аппарата при воздействии возмущений.
Недостатком известного технического решения является то, что при косом обдуве винта, т.е. с увеличением горизонтальной поступательной скорости вертолета, на лопастях, идущих навстречу полета вперед, линейные скорости лопастей складываются со скоростью полета, и набегающий на эти лопасти скоростной поток равен их сумме. А на лопастях, идущих по полету назад, набегающий на них скоростной поток равен разнице линейных скоростей лопастей и скорости полета. Так как угловые скорости вращения всех лопастей равны или незначительно отличаются друг от друга, то это приводит к увеличению подъемной силы на лопастях идущих против полета вперед, к срыву потока и падению подъемной силы на лопастях, идущих по полету назад. В результате уменьшения подъемной силы с одной стороны ометаемой лопастями окружности и увеличения ее с другой стороны возникает кренящий момент, который стремится опрокинуть вертолет на бок в сторону лопасти, идущей по полету (назад), что в основном и ограничивает максимальную горизонтальную скорость вертолета. Значительная разница между скоростями набегающего потока на концах лопастей, идущих вперед и идущих назад, делает практически невозможным применение прямоточных двигателей на лопастях вертолета из-за значительной разницы скоростных напоров между режимами, когда двигатель идет против полета (вперед) и когда двигатель идет по полету (назад), двигатель глохнет. Это приводит к ограничению по минимальному скоростному напору при скоростях V≤70:90 м/с.
Задачами, решаемыми в настоящем изобретении, являются:
увеличение горизонтальной скорости полета вертолета за счет уменьшения угловой скорости вращения лопасти, движущейся во встречном потоке вперед, и увеличения ее вращения в спутном потоке назад;
создание условий для устойчивой работы прямоточных двигателей за счет уменьшения разницы линейных скоростей на концах лопастей во встречном и спутном набегающем потоке.
Поставленные задачи решаются в несущем винте вертолета, включающем приводной вал, расположенные на валу автомат перекоса и механизм общего шага, втулку, укрепленную на валу и имеющую осевые шарниры, и установленные на шарнирах лопасти, лопасти выполнены из двух частей - ведущей и ведомой, ведущая часть лопастей установлена на осевых шарнирах втулки, а ведомые части лопастей установлены на концах ведущих частей на вертикальных шарнирах и имеют между собой силовую передачу.
Предпочтительно ведомые части лопастей винта снабдить противовесами, а оси вертикальных шарниров расположить в центре масс каждой ведомой части лопастей.
Целесообразно винт снабдить флюгерными прямоточными двигателями с регулятором подачи топлива, установленными на свободных концах нескольких или всех ведомых частей лопастей.
Силовую передачу между ведомыми частями лопастей относительно вертикальных шарниров можно выполнить в двух вариантах.
Силовая передача может быть выполнена рычажной. При этом она состоит из исполнительных рычагов, демпферов, системы передающих рычагов, центральной шайбы и фиксаторов. Исполнительные рычаги укреплены на осях вертикальных шарниров каждой ведомой части лопастей и связаны с одной стороны с демпферами, установленными на втулке, а с другой стороны через систему передающих рычагов с центральной шайбой, расположенной над фиксаторами, укрепленными на втулке соосно ей.
Целесообразно фиксаторы выполнить в виде Г - образных реек, укрепленных на диске, при этом рейки расположить между вилками для крепления ведущих частей лопастей втулки.
Силовая передача может быть выполнена гидромеханической. При этом она состоит из гидроцилиндров, зубчатых реек, секторов шестеренок, трубопроводов и гидрозамков. Зубчатые рейки установлены на штоках гидроцилиндров, укрепленных на втулке, и входят в зацепление с секторами шестеренок, закрепленных на осях вертикальных шарниров каждой ведомой части лопастей, подпоршневые и предпоршневые полости гидроцилиндров соответственно соединены между собой трубопроводами, имеющими гидрозамки, установленные в точках их пересечения.
Силовая передача ведомых частей лопастей обеспечивает заданное соотношение крутящих моментов относительно вертикальных шарниров лопастей при горизонтальном поступательном перемещении вертолета. Заданное соотношение крутящих моментов может быть переменным, например обусловленным изменением плеч исполнительных рычагов при повороте лопасти для варианта с рычажной силовой передачей. А для гидромеханической силовой передачи соотношение крутящих моментов постоянное, обусловленное радиусом секторов шестеренок.
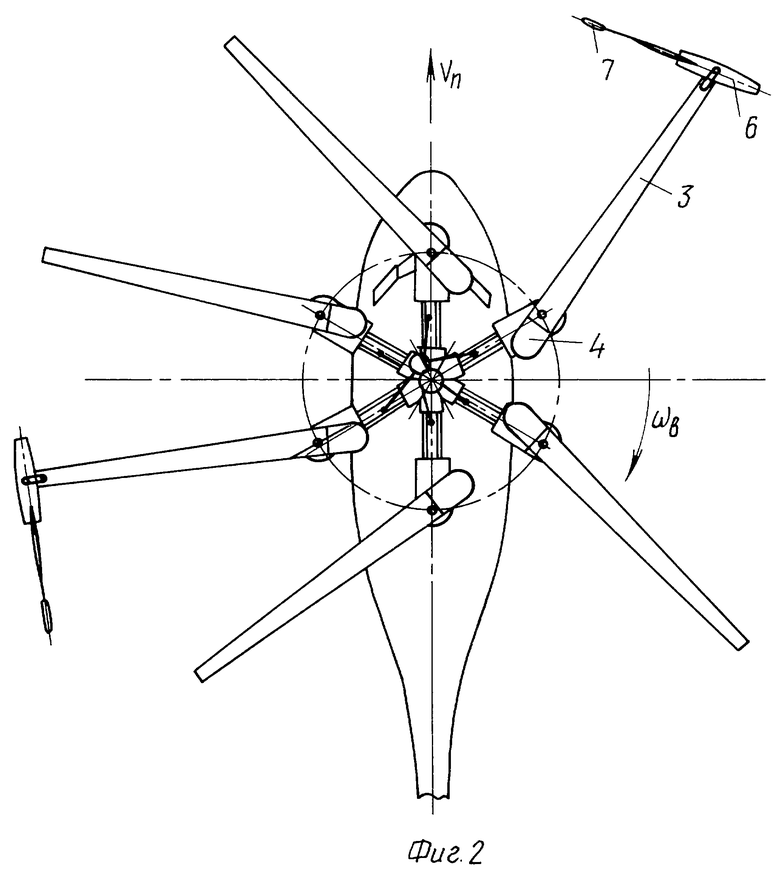
На фиг. 1 представлен общий вид несущего винта вертолета.
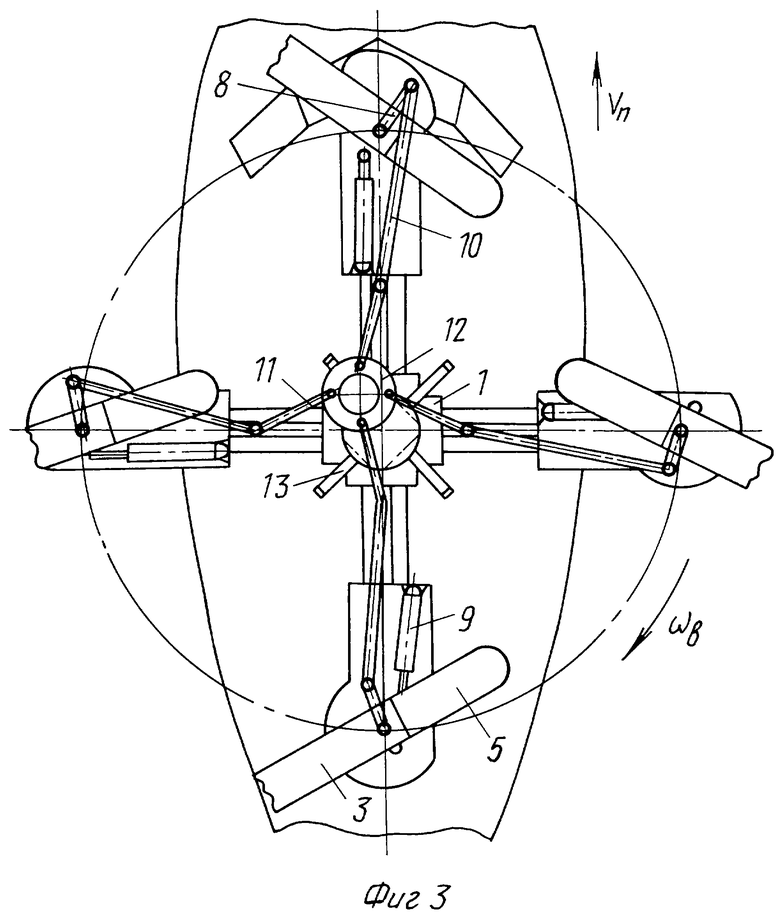
На фиг. 2 - шестилопастной несущий винт с двумя флюгерными прямоточными двигателями.
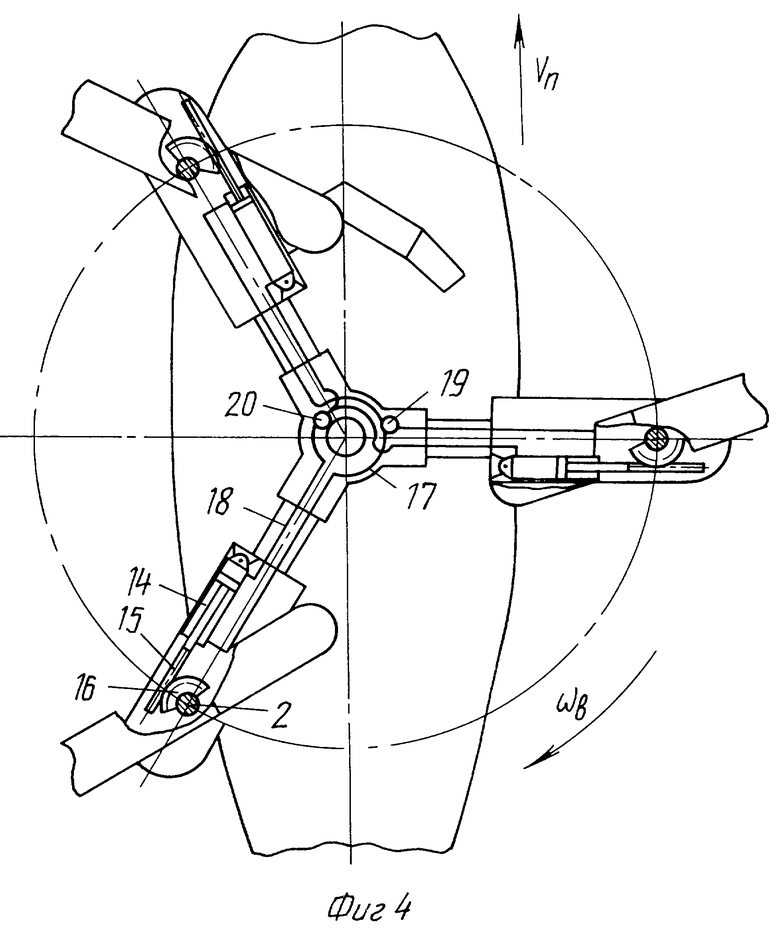
На фиг. 3 - несущий винт вертолета с рычажной силовой передачей (I вариант)
На фиг. 4 - несущий винт вертолета с гидромеханической силовой передачей (II вариант)
Несущий винт вертолета содержит приводной вал (на чертежах не показан), расположенные на валу автомат перекоса и механизм общего шага (на фигурах не показаны), втулку 1, укрепленную на валу и имеющую осевые шарниры (на фигурах не показан), и установленные на шарнирах ведущие 2 и ведомые 3 части лопастей, установленные на свободных концах ведущих частях 2 лопастей на вертикальных шарнирах 4 и имеющие между собой силовую передачу.
Ведомые части 3 лопастей винта снабжены противовесами 5, а оси вертикальных шарниров 4 расположены в центре масс каждой ведомой части 3 лопастей.
Несущий винт вертолета может быть снабжен флюгерными прямоточными двигателями 6 со стабилизаторами 7, установленными на свободных концах нескольких или всех ведомых частях 3 лопастей. Прямоточные двигатели 6 снабжены регуляторами подачи топлива, как функции поворота ведомых лопастей вокруг вертикального шарнира 4.
Рычажная силовая передача (фиг. 3 - I вариант) состоит из исполнительных рычагов 8, демпферов 9, системы передающих рычагов 10 и 11, центральной шайбы 12 и фиксаторов 13.
Исполнительные рычаги 8 укреплены на осях вертикальных шарниров 4 каждой ведомой части 3 лопастей и связаны с одной стороны с демпферами 9, установленными на втулке 1, а с другой стороны через систему передающих рычагов 10 и 11 - с центральной шайбой 12, расположенной над фиксаторами 13, укрепленными на втулке 1.
Фиксаторы 13 могут быть выполнены в виде Г - образных реек, укрепленных на диске, при этом рейки должны быть расположены между вилками для крепления ведущих частей 2 лопастей втулки 1.
Гидромеханическая силовая передача (фиг. 4 - II вариант) состоит из гидроцилиндров 14, зубчатых реек 15, секторов шестеренок 16, трубопроводов 17 и 18 и гидрозамков 19 и 20.
Зубчатые рейки 15 установлены на штоках гидроцилиндров 14, укрепленных на втулке 1, и входят в зацепление с секторами шестеренок 16, закрепленных на осях вертикальных шарниров 4 каждой ведомой части 3 лопастей, подпоршневые полости гидроцилиндров 14 соединены между собой трубопроводами 17, имеющими гидрозамок 19, установленный в точке их пересечения, и предпоршневые полости гидроцилиндров 14 соединены между собой трубопроводами 18, имеющими гидрозамок 20, установленный в точке их пересечения.
Несущий винт вертолета работает следующим образом.
При горизонтальной скорости полета вертолета Vп и при угловой скорости вала несущего винта ωв, на ведомых частях 3 лопастей, идущих против набегающего потока (вперед) (лопасти слева) (фиг. 1) линейные скорости ведомых частей 3 лопастей будут складываться со скоростью полета вертолета, а на ведомых частях 3 лопастей, идущих в сторону набегающего потока (назад) (лопасти справа), скорость полета вертолета будет вычитаться из линейных скоростей ведомых частей 3 лопастей. Вследствие этого на ведомые части 3 лопастей, идущие против набегающего потока (лопасти слева), значения скоростного напора будут выше, чем на ведомых частях 3 лопастей, идущих по потоку (лопасти справа), и, следовательно, крутящий момент относительно шарниров 4 на ведомых частях 3 лопастей слева будет больше, чем на ведомых частях 3 лопастей справа. Так как между ведомыми частями 3 лопастей имеются силовые передачи (фиг. 3) и (фиг. 4), то ведомые части 3 лопастей с большим крутящим моментом слева, вращаясь вокруг шарнира 4, начнут отставать от скорости вращения вала несущего винта ωв и через указанные силовые передачи передадут избыток крутящего момента ведомым частям 3 лопастей справа.
Исполнительный рычаг 8 с левой стороны через систему передающих рычагов 10 и 11 и центральную шайбу 12 воздействует на исполнительный рычаг 8 с правой стороны (при рычажной силовой передаче (фиг. 3)), а при гидромеханической силовой передаче (фиг. 4) жидкость из подпоршневых полостей гидроцилиндров 14 с левой стороны передавливается через трубопроводы 17 в подпоршневые полости гидроцилиндров 14 с правой стороны (при этом штоки гидроцилиндров 14 через зубчатые рейки 15, укрепленные на них, и сектора шестеренок 16, входящих в зацепление зубчатыми рейками 15 и закрепленных на осях вертикальных шарниров 4, поворачивают ведомые части 3 лопастей). При этом лопасти разгоняются. Последние начинают обгонять скорость вращения вала несущего винта ωв до значений, при которых крутящие моменты на ведомых частях 3 лопастей справа не сравняются с крутящими моментами на ведомых частях 3 лопастей слева, и, следовательно, подъемная сила на ведомых частях 3 лопастей слева и справа будет незначительно отличаться друг от друга так же, как и результирующие линейные скорости на концах ведомых частей 3 лопастей, что создает благоприятные условия для устойчивой работы прямоточных двигателей 6 при установке их на ведомых лопастях 3.
При маневрах вертолета на малых горизонтальных скоростях возможна блокировка ведомых частей 3 лопастей посредством фиксаторов 13, фиксирующих центральную шайбу 12 в первом варианте и во втором варианте - гидрозамков 19 и 20.
Выше изложенное позволяет увеличить горизонтальную скорость полета вертолета до 550-600 км/ч, а установка прямоточных двигателей на лопастях значительно упростить и облегчить силовую установку.
При увеличении скорости полета и при постоянной угловой скорости винта ведомые части лопастей, идущие против потока, испытывают большее аэродинамическое сопротивление и начинают отставать от скорости вращения вала винта, поворачиваясь вокруг вертикального шарнира и посредством силовой связи начинают разгонять ведомые части лопастей, идущие в спутном потоке, осредняя тем самым аэродинамическую нагрузку на винт слева и справа от направления полета. В силу вышеизложенного создаются благоприятные условия для режима работы прямоточных двигателей при установке их на концах ведомых частей лопастей. Кроме того, если двигатели установить флюгерными, то вход воздуха в двигатели будет осуществляться по оси двигателей.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СОЗДАНИЯ ТЯГИ И СИЛОВАЯ УСТАНОВКА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2680214C1 |
| ЦЕНТРИФУГА | 1999 |
|
RU2148438C1 |
| ТРАНСМИССИЯ ВЕРТОЛЕТА | 2014 |
|
RU2580344C2 |
| КОЛОНКА ВЕРТОЛЕТА | 1999 |
|
RU2156208C1 |
| Автомат перекоса однороторного летательного аппарата и способ его работы | 2020 |
|
RU2740039C1 |
| ИНДИВИДУАЛЬНЫЙ СКЛАДЫВАЮЩИЙСЯ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1991 |
|
RU2094318C1 |
| ВЕРТОЛЕТ-КОНВЕРТОПЛАН | 2004 |
|
RU2277497C1 |
| САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ С НЕСУЩИМ ВИНТОМ СО СВОРАЧИВАЮЩИМИСЯ УБИРАЕМЫМИ ЛОПАСТЯМИ | 2019 |
|
RU2727787C1 |
| УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ ОБЪЕКТА | 1999 |
|
RU2147733C1 |
| НАРОДНЫЙ ВЕРТОЛЕТ 21 ВЕКА КАН 21 (ВАРИАНТЫ) | 2007 |
|
RU2364550C2 |
Изобретение относится к вертолетостроению, а именно к конструкциям несущего винта. Несущий винт вертолета включает втулку, которая имеет осевые шарниры и установленные на шарнирах лопасти. Лопасти выполнены из двух частей - ведущей и ведомой. Ведущие части лопастей установлены на осевых шарнирах втулки, а ведомые части лопастей установлены на концах ведущих частей на вертикальных шарнирах. Ведомые части лопастей имеют между собой силовую передачу. Посредством силовой передачи ведомые части лопастей, идущие против потока, разгоняют ведомые части лопастей, идущие в спутном потоке. Изобретение позволяет существенно увеличить горизонтальную скорость полета. 5 з.п. ф-лы, 4 ил.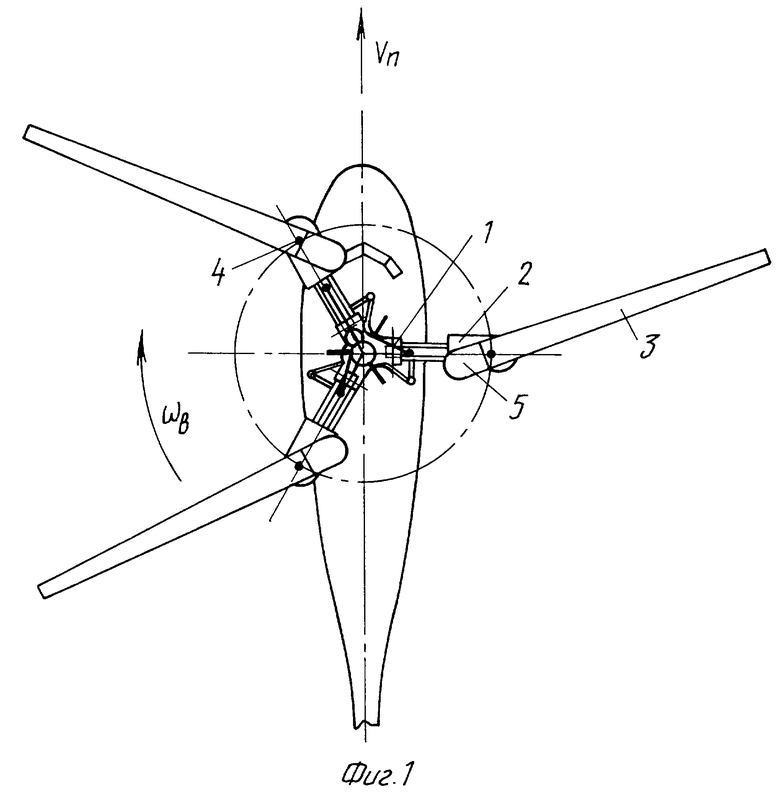
| US 4738592 А, 19.04.1988 | |||
| СИЛОВАЯ УСТАНОВКА ВЕРТОЛЕТА | 1994 |
|
RU2061626C1 |
| US 3509971 А, 05.05.1970 | |||
| Богданов Ю.С | |||
| и др | |||
| Конструкция вертолетов, Учебник для авиационных техникумов | |||
| - М.: Машиностроение, 1990, с | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| СИСТЕМА ВЫСОКОСКОРОСТНОЙ ДЕКАМЕТРОВОЙ РАДИОСВЯЗИ | 2014 |
|
RU2608554C2 |

