Изобретение относится к авиации, а именно к конструкции автомата перекоса несущего винта, трансформируемого в несущее крыло комбинированного вертолета-самолета (трансформера).
Автомат перекоса был изобретен более 100 лет назад и с тех пор принципиально не менялся. Последние несколько десятков лет остро стоит задача создания скоростного экономичного аппарата вертикального взлета и посадки. Одним из перспективных вариантов решения данной задачи является трансформация несущего винта (ротора) в крыло. Такие попытки были предприняты ранее несколькими компаниями: австралийская компания StopRotor Technology разработала прототип летательного аппарата с технологией Hybrid RotorWing. Она позволяет использовать несущий винт в качестве неподвижных крыльев. Патент вертолет-самолет-амфибия RU (2310583) предусматривает использование лопасти несущего винта при вертикальном взлете и в режиме крыла при горизонтальном полете. Разработка 2013 года Stop-Rotor Rotary Wing Aicraft военно-морской лаборатории (NRL) США, которая представляла БПЛА – трансформер и имеет запатентованную технологию, позволяющую переключение между режимом несущего винта и режимом фиксации крыла. Проект Boeing X-50 с реактивным приводом лопастей несущего винта, трансформируемого в крыло, проект в настоящее время закрыт. Макет-образец К-90 представленный в 2008 году КБ Камова на специализированной выставке HeliRussia и, возможно, другие, но в проектах указана только необходимость применения лопасти винта в качестве крыла. Таким образом, потребность есть, но в результате длительных поисков несколькими исполнителями в открытых мировых источниках не обнаружено описания автомата перекоса или другого устройства, позволяющего выполнить в полете поворот лопасти на 180 гр. и обратно, тем самым выполняя трансформацию лопасти несущего винта в крыло и обратно. По этой причине нет возможности представить достаточно близкие аналоги и прототипы.
Создание такого устройства, а также решение вопросов всего аппарата в целом открывает самые широкие возможности для массового создания скоростных экономичных аппаратов вертикального взлета и посадки. В нашем решении используется часть традиционных узлов автомата перекоса, но четко установлена количественная обязательная взаимосвязь между несколькими основными параметрами (характеристиками), поэтому в соответствии с этим изменена конструкция автомата перекоса, это позволяет получить совершенно новые свойства: характеристики и возможности, которыми ранее ни один летательный аппарат не обладал.
Лопасти несущего винта вертолета часто имеют симметричный профиль. Это связано с его характерной особенностью – при изменении угла атаки положение фокуса крыла, т.е. точки суммарного приложения сил, не меняется, она не перемещается по хорде крыла, всегда находится на 25% длины хорды, поэтому лопасти несущего винта крепятся в этой точке и имеют возможность поворачиваться вокруг нее, не меняя положения центра нагрузки. Аналогичные тонкие симметричные профили применяются на самолетах с околозвуковыми скоростями. Таким образом одну и туже лопасть мы можем оптимально применять в двух режимах.
Подробно, на уровне технического проекта разработана конструкция всего самолета, но она пока не является предметом изобретения, возможно в будущем к этому вопросу можно будет вернуться.
Главным путем повышения скорости и экономичности в авиации является увеличение высотности полетов, в разреженном воздухе сопротивление значительно падает, но для этого должны быть обеспечены необходимая скорость и площадь несущей поверхности. В нашем случае, на небольшой высоте, где плотность воздуха максимальная, для выполнения переходного процесса применяем относительно небольшие поверхности переднего горизонтального оперения (далее - ПГО) и заднего крыла. Тонкие профили не позволяют разместить в крыльях эффективную механизацию. Для повышения их несущей способности на низких скоростях, в переходном режиме, когда двигатель имеет значительный резерв мощности, в качестве механизации применено управление пограничным слоем и реактивные закрылки. Для этого в конструкции предусмотрен вентилятор и воздуховоды, изготавливаемые из легких и прочных композитных материалов. После выполнения переходного процесса вентилятор отключается или может использоваться для наддува двигателя для последующего высотного полета, так как дополнительно появляются несущие высокоскоростные поверхности для горизонтального полета в виде роторов-крыльев в режиме «крыло». Сумма всех несущих поверхностей и их характеристики позволяют выполнять высотный скоростной экономичный полет.
Известен вертолет (RU 2407675) продольной схемы (аналог), содержащий фюзеляж, несущие винты, к втулкам которых прикреплены лопасти, систему управления лопастями несущих винтов, состоящую из командных рычагов управления в кабине пилота и проводки управления, соединенной с лопастями, автопилот и двигатели для привода несущих винтов, также снабжен не менее чем двумя воздушными винтами с приводом от двигателей, установленными симметрично относительно продольной оси фюзеляжа с возможностью общего шага как совместно, так и дифференциально, система управления вертолетом снабжена устройством, изменяющим частоту вращения несущих винтов, лопасти закреплены на втулках несущих винтов жестко, а автопилот выполнен с функцией стабилизации горизонтального положения фюзеляжа. Указанная схема позволяет повысить скорость летательного аппарата по сравнению с обычным вертолетом, так как большая часть мощности в горизонтальном полете идет на маршевые воздушные винты, несущие винты с закрепленными жестко лопастями создают только вертикальное усилие. Некоторые опытные образцы развивали скорость до 460 км/ч. Данная или немного большая цифра является предельной для указанной схемы, так как с повышением путевой скорости даже с учетом снижения скорости вращения несущих винтов на 20-30% суммарная скорость на «наступающей» лопасти достигает околозвуковых значений, что не позволяет дальше увеличивать путевую скорость. Кроме этого часть энергии уходит на вращение несущих винтов. Очевидно, что принципиально задача не решена. Скоростной и экономической эту схему назвать нельзя.
Известен высокоскоростной летательный аппарат (аналог) с большой дальностью полета (RU2520843) содержащий фюзеляж, два несущих винта противоположного вращения, расположенных тандемом, по меньше мере один движитель, моторную группу для подачи мощности на несущие винты и движители, систему объединения, постоянно соединяющую упомянутую моторную группу с упомянутой вращающейся несущей поверхностью, средство регулирования скорости упомянутых несущих винтов для поддержания скорости вращения каждого несущего винта, равной первой скорости вращения до первой воздушной на траектории упомянутого летательного аппарата, затем, затем для постепенного снижения скорости вращения по линейному закону в зависимости от воздушной скорости на траектории вертолета. Аппарат может содержать в средней части фюзеляжа крыло по типу высоко- средне- или низкоплан, которое позволяет снизить нагрузку на несущие винты, но при этом к сопротивлению горизонтальному полету от несущих винтов появляется дополнительное сопротивление в виде упомянутого крыла, на значительный прирост скорости рассчитывать нельзя. Задача создания скоростного и экономичного аппарата не решена.
Известен вертолет-самолет-амфибия RU (2310583), который содержит моноплан с высокорасположенным крылом небольшого удлинения, на консолях которого смонтированы два поворотных кольцевых канала, оснащенных узлами поворота и винтами, создающими вертикальную и с соответствующим отклонением горизонтальную тягу, и снабженных в их центре на горизонтальных ребрах жесткости редукторами винтов, которые связаны соединительными валами с главным редуктором, приводимым силовой установкой, включающей два двигателя, установленные в гондолах по обе стороны от продольной оси фюзеляжа и снабженные синхронизирующим валом и газовыми рулями путевого и продольного управления, смонтированными в конце хвостовой балки, хвостовое оперение и шасси трехопорное, убирающееся в носовой отсек и герметичные борт–отсеки, снабжен возможностью преобразования на вертолетных режимах полета с одно- в трехвинтовую ярусную схему 2+1 и обратно или на самолетных режимах полета с моно- в биплановую схему и обратно, при этом главный редуктор оснащен вертикальным валом с двухлопастным центральным несущим винтом, лопасти которого имеют законцовки, формирующие его в S-образную форму в плане, при этом одна из его лопастей снабжена возможностью изменения угла установки, допускающей переворот лопасти в вертикальной плоскости в момент ее расположения вдоль продольной оси фюзеляжа в хвостовой части, для преобразования двухлопастного несущего винта в крыло, имеющее законцовки, придающие ему форму в плане в виде скобы, и обратно, вертикальный вал оснащен дополнительным приводом, обеспечивающим фиксированный поворот в горизонтальной плоскости и установку крыла перпендикулярно продольной оси фюзеляжа относительно задней кромки.
В режиме горизонтального полета от применения схемы биплан, с крыльями, расположенными на одной вертикали, да еще на таком близком расстоянии отказались еще вначале 20-го века в связи с тем, что с ростом скорости они создают большое сопротивление, данная схема была применена только на самых тихоходных самолетах. Из-за отрицательного взаимного влияния двух близкорасположенных крыльев схема параллельный «биплан» не получила распространения.
В режиме вертикального взлета могут возникнуть проблемы с безопасностью, так как при резких маневрах, или большой горизонтальной скорости, т.е при достаточно больших маховых движениях лопастей в вертикальной плоскости, возможно задевание крыльев, также как в аналогичных двухлопастных вертолетах «Робинсон» возникает режим «бампинь», т.е. неуправляемые удары лопастью о хвостовую балку. Близкорасположенное к несущему винту, большое по площади крыло также значительно снижает эффективность несущего винта и требует большей мощности. В изобретении принята более современная, перспективная и экономичная схема – продольный триплан или многоплан, не имеющая конструктивных ограничений скорости, сохраняя небольшие размеры всего самолета, взаимное отрицательное влияния трех несущих поверхностей компенсировано следующим образом:
- ПГО находится от ротора-крыла на значительном удалении по высоте и в горизонтальной плоскости (в плане);
- заднее крыло-консоль находится также на значительном удалении, его угол атаки также может подбираться в зависимости от режима полета.
Главной общей технической задачей было создание самолёта вертикального взлёта и посадки (далее – СВВП) не имеющего конструктивных ограничений максимальной скорости и на некоторых, специально спроектированных аппаратах, она должна достигать 800-900 км/ч. Аппарат должен быть предназначен для внеаэродромного, часто индивидуального базирования и в стесненных условиях, поэтому должен быть возможно компактнее но, самое главное, характеристики горизонтального полета: весовая отдача, экономичность, дальность, скорость должны быть на уровне лучших самолетных характеристик данного класса. Сложность аэродинамической схемы и управления не должна быть препятствием или сдерживающим фактором, так как предполагается максимально возможное применение автоматического электродистанционного управления как отдельных элементов и узлов, так и всего аппарата, т.е. всей системы в целом, с максимальным использованием всех технических возможностей. Широкое использование автоматического управления является преимуществом, а не недостатком, так как появляется возможность применить наиболее передовые технические достижения.
Изобретение призвано создать механизмы автоматов перекоса лопастей, которые долговечны, просты в сборке и могут устанавливаться на летательные аппараты, имеющие традиционный самолетный фюзеляж и основные самолетные системы.
Технический результат - конструкции позволяют выполнять вертикальные взлеты, посадки и высокоскоростной горизонтальный крейсерский полет, различных летательных аппаратов, в том числе самолета-амфибии.
Устройство предназначено для аппаратов с одним несущим винтом, когда несущий винт должен выполнять маховые движения.
Технический результат достигается за счет автомата перекоса однороторного летательного аппарата, который состоит из основания, которое является частью фюзеляжа и переносит все нагрузки с лопастей–крыльев на фюзеляж, к которому болтами крепится внутренняя стойка, на которую с помощью опорных подшипников и упорного подшипника установлен несущий вращающийся цилиндр, с наружной стороны цилиндра закреплена ведомая шестерня, к которой через ведущий вал с ведущей шестерней осуществляется подвод энергии от двигателя, ведущий вал расположены в подшипниках, при этом отдельный привод, вал, серьга, тяга, пружина, стопор, подшипник стопора выполнены для фиксации лопастей от маховых движений, другой отдельный привод выполнен для управления стопором вращения несущего вращающегося цилиндра, на котором расположена скользящая по шпонке втулка, наружная обойма нижней тарелки и рычаги управления циклическим шагом, которые соединены с вилкой управления общим шагом, которая управляется своим приводом, при этом через тяги управляющее воздействие передается на наружную обойму верхней тарелки и затем на внутреннюю обойму верхней тарелки также соединенной через карданное соединение со скользящей втулкой и тягой к переворотной лопасти-крылу и тягой к поворотной лопасти, в центральной части лопасти-крыла находится механизм доворота переворотной лопасти, с обеих сторон которого находятся опорно-упорные подшипники, через подшипники маховых движений соединены лопасти–крылья с несущим вращающимся цилиндром, при этом к точка соединения тяги на управляющей верхней тарелке при нулевом угле атаки лопастей–крыльев находится в одной вертикальной плоскости с осью поворота лопасти–крыла, суммарная величина хода общего шага и хода циклического шага в одном направлении больше или равна радиусу рычага от оси поворота лопасти до точки соединения тяги на лопасти–крыле.
Способ работы автомата перекоса однороторного аппарата, в котором во время поворота на 180 градусов одной лопасти, вторая лопасть все время остается в неподвижном и в горизонтальном положении с углом атаки 0 градусов и не создает никаких помех полету в переходном режиме.
Количество роторов-крыльев зависит от взлетного веса самолета и расчетной крейсерской скорости. Например, по предварительным расчетам, для 6-местного СВВП взлетным весом до 1,5 – 2 т достаточно одного ротора–крыла над центром масс аппарата. При этом на СВВП с одним ротором-крылом в режиме переходного процесса, на скорости до 200 км/ч, на ПГО и заднее крыло-консоль ложится 100% весовой нагрузки. Аэродинамические движители для высокоскоростных аппаратов не могут иметь хорошие характеристики при вертикальном взлете, т.е почти в статическом режиме и на крейсерской скорости. Вентиляторы должны работать с оптимальными характеристиками на крейсерской скорости, а основная нагрузка при вертикальном взлете приходится на ротор–лопасти. Основная конструктивная задача — это создать лопасть-крыло, возможно большого удлинения, сохраняющего свою жесткость в режиме крыла и при этом имеющего небольшую толщину (высоту). ПГО и заднее крыло-консоль должно обладать такими же характеристиками и при этом иметь мощную механизацию в тонком профиле, это реализовано в управлении (сдувом) пограничным слоем и применении реактивных закрылков. Это позволяет создавать большую подъемную силу при относительно небольшой скорости, минимальное сопротивление и высокую эффективность при крейсерской скорости. После окончания переходного процесса к двум несущим поверхностям – ПГО и заднему крылу - консоли добавляется еще одна или две - роторов-крыльев. Имея достаточно большую суммарную несущую поверхность и трансзвуковые аэродинамические профили, появляется возможность подниматься на большую высоту и в условиях разреженного воздуха выполнять экономичный высокоскоростной крейсерский полет аналогично разрабатываемому компанией «Боинг» проекту с тонким длинным трансзвуковым крылом ферменной конструкции Transonic Truss-Braced Wing (TTBW).
С увеличением роторов до 2 нагрузка на ПГО и заднее крыло-консоль переходном процессе может составлять не более 50 %, так переходной процесс выполняется не одновременно, а последовательно на каждом роторе-крыле. При 4-х и более роторах-крыльях, имеющих кратковременный достаточный запас в подъемном усилии необходимость в ПГО и задних крыльях - консолях вообще может исчезнуть. Фактически получается самолет–трансформер. После последовательного перехода в режим крыльев всех роторов образуется комплекс несущих поверхностей, который называется продольный обратный биплан, если есть два ротора–крыла, триплан – если три крыла и, соответственно, далее в зависимости от количества ротор - крыльев. Некоторые исследования показывают, что они являются высокоэффективными несущими устройствами по сравнению с обычным крылом даже при жестко зафиксированных углах атаки каждого крыла. В нашем варианте негативное влияние соседних крыльев снижается выбором указанной выше схемы их расположения и тем что, все крылья, их углы атаки управляются электронной бортовой системой, соответственно будут иметь свои индивидуальные оптимальные параметры в зависимости от скорости и режима самолета. В каждом режиме самолета изменение скорости и направления после каждого крыла будет учтено на последующем крыле, и оно будет выставлено под оптимальным углом.
Место установки основных движителей определено таким образом, чтобы расстояние от двигателя (двигателей) до редуктора и соответственно от редуктора до вентиляторов было минимальным. Вентиляторы находятся на конце крыла. После вентиляторов к их кольцевым кожухам закреплены изогнутые по форме данных кожухов кили, с помощью которых осуществляется управление по курсу в горизонтальном полете и при вертикальном подъеме, в конечном счете получился механизм управляемого вектора тяги. При работе двигателей, даже на нулевой скорости движения, указанные кили являются эффективными органами управления.
Вертикальные стойки, через которые проходят вертикальные валы к роторам-крыльям, имеют в плане обтекаемую форму вытянутой капли с закругленной передней частью и острой задней кромкой, являются своеобразными стабилизаторами курсовой устойчивости.
В целях исключения чрезмерного усиления и, соответственно, утяжеления части фюзеляжа в местах установки крыла-консоли разработана новая конструкция силовых элементов заднего крыла -консоли, проходящих через фюзеляж, которая является фактически одним сборным силовым элементом, при этом нагрузки на фюзеляж значительно меньше, а весь узел значительно легче, компактнее, проще и надежнее.
Вертикальный взлет выполняется следующим образом. Перед взлетом поворотная лопасть ротора-крыла находится в режиме «ротор, несущий винт». ПГО и задние крылья-консоли повернуты вертикально вверх. При однороторной схеме реактивный момент от несущего винта компенсируется килями, находящимися в потоке воздуха за маршевыми вентиляторами, так как даже при нулевой скорости всего аппарата они достаточно эффективны. Предложенная конструкция килей имеет преимущества: малое сопротивление, так как они расположены в потоке воздуха за кожухами вентиляторов и также выступают в роли винглетов, законцовок крыла, предотвращая перетекание воздуха с нижней части крыла на верхнюю, увеличивая его эффективность. После запуска двигателя, разворота всех роторов и подъема СВВП в вертолетном режиме на необходимую высоту от 5 м, может осуществляться переход в горизонтальный режим полета. Маршевые движители - вентиляторы плавно начинают поворачиваться вперед, создавая горизонтальную составляющую общей тяги. По мере набора скорости ПГО и заднее консоль-крыло начинают воспринимать весовую нагрузку самолета. После того, как подъемная сила ПГО и заднего крыла-консоли превысят вес самолета, выполняется останов одного из роторов-крыльев, на завершающей стадии которого производится поворот лопасти в режим «крыло». В дальнейшем полет выполняется в обычном самолетном режиме. Если самолет многороторный, то каждый ротор - крыло в зависимости от скорости и высоты устанавливаются в своем определенном оптимальном угле атаки. Данный режим определен заранее расчетным и опытным путем.
Переход с горизонтального полета в режим вертикального вертолетного снижения и приземления выполняется после снижения горизонтальной скорости до величины, позволяющей выполнять полет с помощью несущих поверхностей ПГО и заднего крыла - консоли. Постепенно на роторе–крыле устанавливается нулевой угол атаки, когда им уже не создается подъемная сила, затем лопасть ротора-крыла поворачивается в режим «лопасть». Ротор начинает постепенно разворачиваться также при нулевом угле атаки и, соответственно, нулевой подъемной силе, после разворота производится его нагружение установкой лопастей на необходимый угол. В многороторном аппарате такие операции производятся последовательно, на каждом роторе.
Конкретно для автомата перекоса переход ротора из вертолетного режима в самолетный производится следующим образом. Аппарат выполняет подъем в обычном вертолетном режиме, лопасти имеют конфигурацию обычного вертолетного несущего винта. Переход в горизонтальный полет может выполняться на любой высоте, от 5 до 5000 метров, в режимах набора высоты, снижения или горизонтального полета после достижения необходимой горизонтальной скорости. Перевод осуществляется плавно, по мере набора горизонтальной скорости с помощью маршевых вентиляторов и перехода весовой нагрузки на несущие поверхности переднего горизонтального оперения и основного (заднего) крыла, углы атаки общего шага и циклического шага винта снижаются до 0 град, винт вращается только в горизонтальной плоскости, в это время с помощью привода и специального механизма он фиксируется от маховых движений в строго горизонтальном положении, Чтобы скорость перевода была возможно ниже на несущих поверхностях включается режим максимальной механизации – подается воздух для управления пограничным слоем воздуха. После снижения до 0 угла атаки лопастей и фиксации их специальным механизмом в строго горизонтальном положении, в коробке передач осуществляется перевод мощности к нему от основного двигателя на разгонный электродвигатель – генератор, который на долю секунды останавливает ротор вдоль продольной оси фюзеляжа, поворачиваемая лопасть располагается над задней частью фюзеляжа. После этого одновременно дается команда на установку минимального общего шага (-45 град) и минимального (-45 град) угла циклического шага на поворотной лопасти, которая находится над задней частью фюзеляжа, соответственно установится максимальный угол циклического шага на неповортной лопасти, которая находится над передней частью фюзеляжа. Поворотная лопасть с удвоенной скоростью, общий шаг (-45 град) + циклический шаг (-45 град), занимает положение -90 град, неповоротная лопасть над передней частью фюзеляжа остается неподвижной, так как происходит встречная взаимокомпенсация движения общего шага на -45 град и циклического шага на +45 град. С помощью механизма доворота поворотная лопасть проходит участок от -90 град до примерно -95 град. Механизму доворота будет помогать или вообще может его заменить определенное положение ротора и встречный поток воздуха, если с помощью электродвигателя - генератора ротор начать поворачивать в обратную сторону до занятия им своего положения, соответствующему режиму крыла (перпендикулярно продольной оси самолета). Процесс обратного поворота ротора на 90 град и поворота лопасти на 180 град происходит быстро и одновременно, сразу же подается обратная управляющая команда, общий шаг и циклический шаг дижутся в свое среднее положение - точка 0 град, поворотная лопасть при этом, пройдя точки -90 град и -95 град движется в направлении - 180 град, что на роторе соответствует режиму крыла с углом атаки 0 град. Таким образом на роторе выполнен переход из режима «несущий винт» в режим «управляемого полноповоротного крыла» симметричного профиля. Предполагается, что такой переход будет выполняться на скорости от 100 до 200 км/ч. Несущий вращающийся силовой цилиндр жестко фиксируется от поворота специальным приводным штифтом, затем угол атаки лопастей-крыльев увеличивается, и они начинают воспринимать весовую нагрузку. Процесс представлен детально, пошагово, реально он будет происходить быстро, лишь на доли секунды останавливается вращение ротора в продольном положении (вдоль продольной оси самолета), затем короткий поворот ротора на 90 градусов в обратную сторону с одновременным поворотом лопасти на 180 гр., процесс легко может выполняться в автоматическом режиме без участия пилотов. В салоне самолета он будет мало заметен, не более чем выпуск и уборка закрылков и шасси у других самолетов. Дальше скорость самолета увеличивается до крейсерской и, при необходимости, до максимальной. Обратный переход выполняется в обратном порядке: снижение скорости, остановка и установка лопастей-крыльев вдоль продольной оси самолета, перевода одной лопасти в режим «винт», затем при нулевом угле атаки или на авторотации в режиме автожира выполняется раскрутка ротора разгонным электродвигателем, производится расфиксация лопастей-крыльев от маховых движений и подача управление общим и циклическим шагом. Ротор перешел в режим «несущий винт».
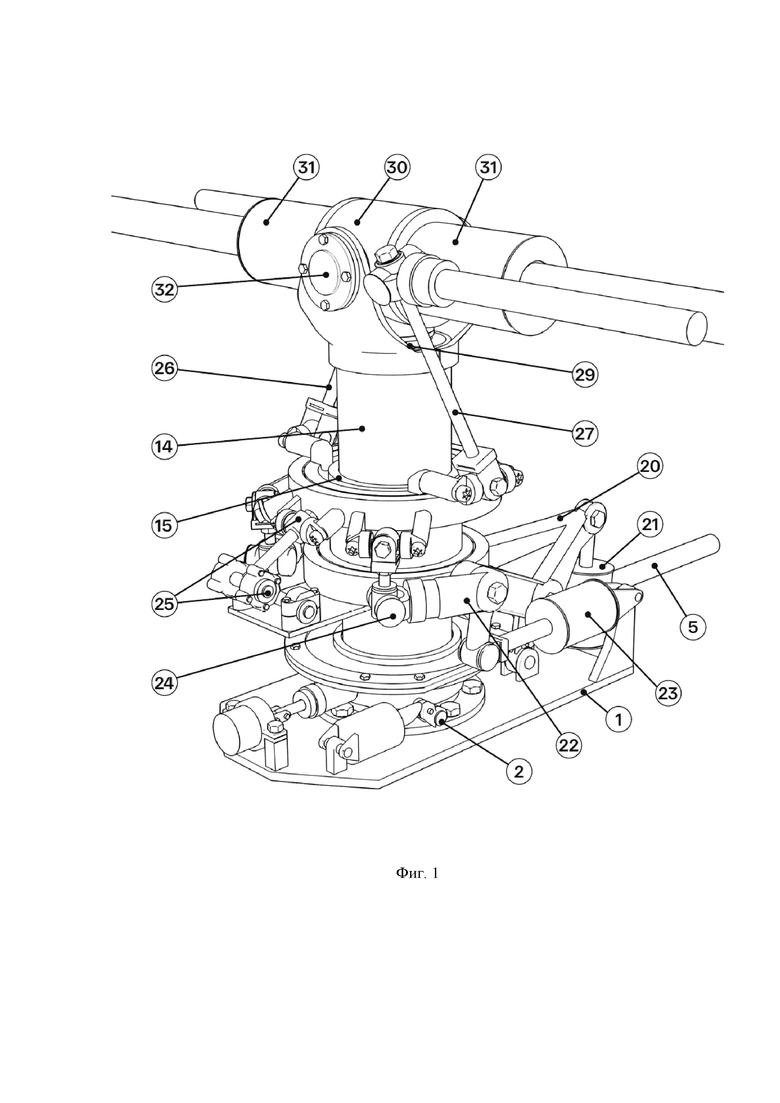
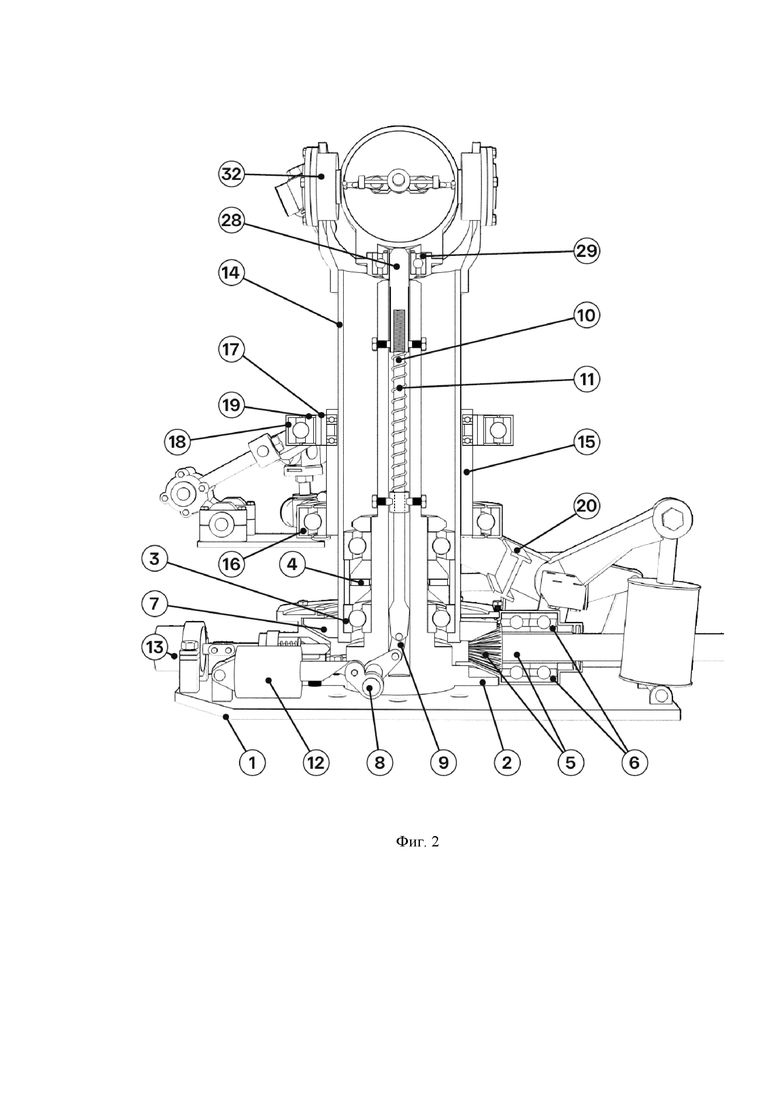
Основные элементы автомата перекоса изображены на фиг. 1-2.
Основание 1
Внутренняя стойка 2
Опорные подшипники 3
Упорный подшипник 4
Ведущий вал с шестерней 5
Подшипники 6
Ведомая шестерня 7
Вал 8
Серьга 9
Тяги 10
Пружины 11
Привод 12 позволяют фиксировать лопасть от маховых движений.
Привод 13 управляет стопорением вращения несущего вращающегося цилиндра
Несущий вращающийся цилиндр 14
Скользящая по шпонке втулка 15
Наружная обойма 16 нижней тарелки
Карданное соединение 17
Внутренняя обойма верхней тарелки 18
Наружная обойма верхней тарелки 19
Вилка управления общим шагом 20
Привод вилки общего шага 21
Рычаги управления циклическим шагом 22
Приводы рычагов управления циклическим шагом 23
Тяги 24 от рычагов циклического шага к наружной обойме верхней тарелки 19
Шлиц-шарнир 25 обеспечивающий неизменность по азимуту наружных обойм нижней и верхней тарелок
Тяга 26 к переворотной лопасти-крылу
Тяга 27 к поворотной лопасти
Стопор 28 лопастей от маховых движений
Подшипник стопора 29 лопастей от маховых движений
Механизм доворота 30 переворотной лопасти
Опорно-упорные подшипники 31
Подшипники маховых движений лопасти 32.
Автомат перекоса состоит из основания 1, которое одновременно является частью фюзеляжа и переносит все нагрузки с лопасти–крыла на фюзеляж. К основанию с помощью болтов крепится внутренняя стойка 2, на которую с помощью опорных подшипников 3 и упорного подшипника 4 установлен несущий вращающийся цилиндр 14. С наружной стороны цилиндра закреплена ведомая шестерня 7, к которой через ведущий вал с ведущей шестерней 5 осуществляется подвод энергии от двигателя. Ведущий вал расположен в подшипниках 6. Привод 12, вал 8, серьга 9, тяги 10, пружины 11, подшипник 29 для стопора 28 позволяют фиксировать лопасть от маховых движений. Привод 13 управляет стопорением вращения несущего вращающегося цилиндра, на котором расположена скользящая по шпонке втулка 15. Наружная обойма 16 нижней тарелки и рычаги управления циклическим шагом 22 соединены с вилкой управления 20 общим шагом, которая управляется приводом 21. Через тяги 24 управляющее воздействие передается на наружную обойму верхней тарелки 19 и затем на внутреннюю обойму верхней тарелки 18 также соединенной через карданное соединение 17 со скользящей втулкой 15 и тягой 26 к переворотной лопасти-крылу и тягой 27 к поворотной лопасти. В центральной части лопасти-крыла находится механизм доворота 30 переворотной лопасти, с обеих сторон которого находятся опорно-упорные подшипники 31. Через подшипники маховых движений лопасти 32 соединены лопасть–крыло и несущий вращающийся цилиндр 14.
От двигателя мощность через подводящий вал и ведущую шестерню 5 передается на ведомую шестерню 7, расположенную на вращающемся несущем цилиндре 14, на котором так же находятся лопасти-крылья. Управление общим шагом осуществляется с помощью привода 21, движение передается на вилку 20, которая осями соединена с наружной невращающейся обоймой нижней тарелки 16, поднимает и опускает ее, внутренняя вращающиеся обойма, которой закреплена на скользящей по шпонке втулке 15. К ее верхней части через карданное соединение 17 закреплена верхняя тарелка, на которую управляющее воздействие поступает от двух приводов 23 через рычаги управления 22 и две тяги 24 управления циклическим шагом. Сочетание положения двух приводов определяет положение верхней тарелки и, таким образом, параметры циклического шага, положение привода 21 и вилки 20 определяет параметры общего шага.
Изобретение относится к авиации, а именно к конструкции автомата перекоса несущего ротора–крыла комбинированного вертолета-самолета. Автомат перекоса состоит из основания, к которому болтами крепится внутренняя стойка, на которую с помощью опорных подшипников и упорного подшипника установлен несущий вращающийся цилиндр. С наружной стороны цилиндра закреплена ведомая шестерня, к которой через ведущий вал с ведущей шестерней осуществляется подвод энергии от двигателя. Ведущий вал расположен в подшипниках. Еще один привод выполнен для управления стопорением вращения несущего вращающегося цилиндра. При этом через тяги управляющее воздействие передается на наружную обойму верхней тарелки и затем на внутреннюю обойму верхней тарелки, также соединенной через карданное соединение со скользящей втулкой и тягой к переворотной лопасти-крылу. В центральной части лопасти-крыла находится механизм поворота переворотной лопасти, с обоих сторон которого находятся опорно-упорные подшипники. Через подшипники маховых движений лопасти соединены лопасть–крыло и несущий вращающийся цилиндр. Обеспечивается увеличение скорости горизонтального полета летательных аппаратов вертикального взлета и посадки. 2 н.п. ф-лы, 2 ил.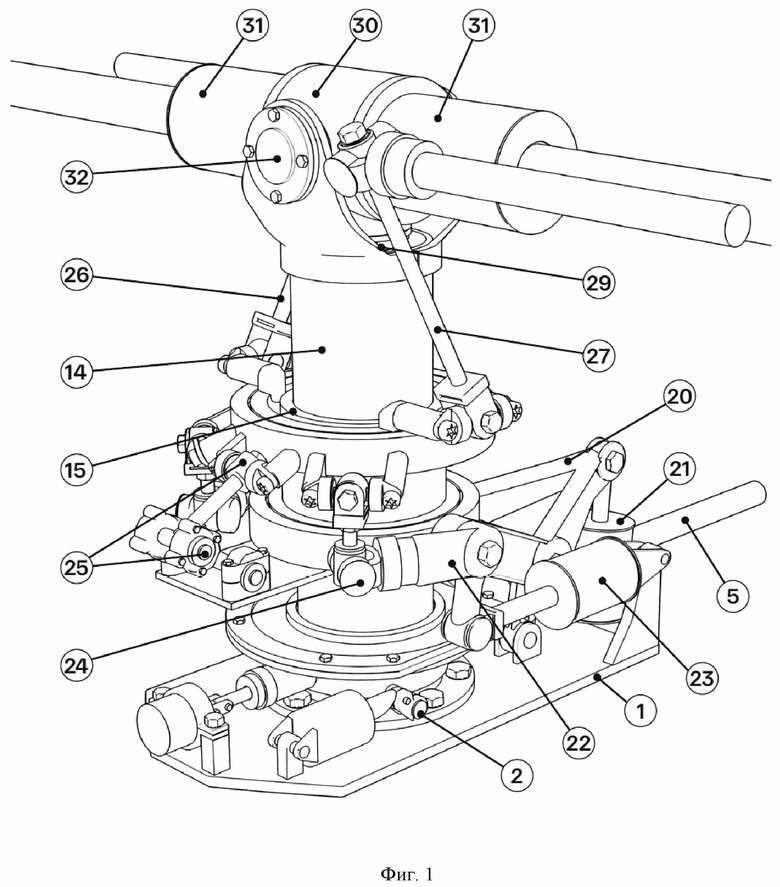
1. Автомат перекоса однороторного летательного аппарата, состоящий из основания, которое является частью фюзеляжа и переносит все нагрузки с лопастей–крыльев на фюзеляж, к которому болтами крепится внутренняя стойка, на которую с помощью опорных подшипников и упорного подшипника установлен несущий вращающийся цилиндр, с наружной стороны цилиндра закреплена ведомая шестерня, к которой через ведущий вал с ведущей шестерней осуществляется подвод энергии от двигателя, ведущий вал расположен в подшипниках, при этом отдельный привод, вал, серьга, тяга, пружина, стопор, подшипник стопора выполнены для фиксации лопастей от маховых движений, отличающийся тем, что другой отдельный привод выполнен для управления стопором вращения несущего вращающегося цилиндра, на котором расположена скользящая по шпонке втулка, наружная обойма нижней тарелки и рычаги управления циклическим шагом, которые соединены с вилкой управления общим шагом, которая управляется своим приводом, при этом через тяги управляющее воздействие передается на наружную обойму верхней тарелки и затем на внутреннюю обойму верхней тарелки, также соединенной через карданное соединение со скользящей втулкой и тягой к переворотной лопасти-крылу и тягой к поворотной лопасти-крылу, в центральной части лопасти-крыла находится механизм доворота переворотной лопасти, с обеих сторон которого находятся опорно-упорные подшипники, через подшипники маховых движений соединены лопасти–крылья с несущим вращающимся цилиндром, при этом точка соединения тяги на управляющей верхней тарелке при нулевом угле атаки лопастей–крыльев находится в одной вертикальной плоскости с осью поворота лопасти–крыла, суммарная величина хода общего шага и хода циклического шага в одном направлении больше или равна радиусу рычага от оси поворота лопасти до точки соединения тяги на лопасти–крыле.
2. Способ работы автомата перекоса однороторного аппарата по п. 1, отличающийся тем, что во время поворота на 180 градусов одной лопасти, вторая лопасть все время остается в неподвижном и в горизонтальном положении с углом атаки 0 градусов и не создает никаких помех полету в переходном режиме.
| ВИНТОКРЫЛ | 2012 |
|
RU2500578C1 |
| US 20180057162 A1, 01.03.2018 | |||
| US 20100230547 A1, 16.09.2010 | |||
| RU 2001120167 A, 27.06.2003 | |||
| WO 2016109408 A1, 07.07.2016. | |||

