Изобретение относится к авиационной технике, в частности к индивидуальным летательным аппаратам вертикального взлета и посадки.
Известны летательные аппараты вертикального взлета и посадки вертолеты, имеющие фюзеляж и несущую систему с приводом от поршневого или газотурбинного двигателя [1]
Однако вертолеты имеют сложную конструкцию, большую массу и габариты, а также высокую стоимость производства и эксплуатации. Жесткая конструкция фюзеляжа вертолета не позволяет выполнить его складывающимся в стояночном или транспортировочном положении.
Известны летательные аппараты индивидуального пользования - мотодельтапланы (дельталеты), имеющие тележку, крыло и воздушный винт с приводом от поршневого двигателя [2]
В транспортировочном положении тележка и крыло складываются, что существенно уменьшает их габариты.
Однако силовая установка мотодельтаплана имеет большую массу и стоимость, что обусловливает большую массу и стоимость всего летательного аппарата. Кроме того, мотодельтаплан не обеспечивает вертикальный взлет и посадку.
Наиболее близким к изобретению является летательный аппарат вертикального взлета и посадки, снабженный дискообразной аэродинамической поверхностью, пропеллером и двигателем внутреннего сгорания [3]
Однако этот летательный аппарат также имеет большую массу, габариты и стоимость, а жесткая конструкция не позволяет выполнить его складывающимся.
Цель изобретения создание индивидуального складывающегося летательного аппарата, простого по конструкции, имеющего малую массу, габариты и стоимость, и обеспечивающего управляемый полет, вертикальный взлет и посадку.
Цель достигается тем, что в индивидуальном складывающемся летательном аппарате, включающем круглое крыло, соосные воздушные винты обдува крыла и подвесную систему с сиденьем летчика и топливным баком, согласно изобретения круглое крыло и воздушные винты обдува крыла выполнены складывающимися, а привод воздушных винтов обдува крыла осуществляется с помощью прямоточных воздушно-реактивных двигателей закрепленных на концах лопастей винтов.
Предлагаемое сравнению с прототипом имеет существенные отличительные признаки, поэтому оно соответствует критерию "существенные отличия".
В процессе проведения патентных исследований аналогичных технических решений, известных в науке и технике, не обнаружено, поэтому предлагаемое техническое решение соответствует критерию "новизна".
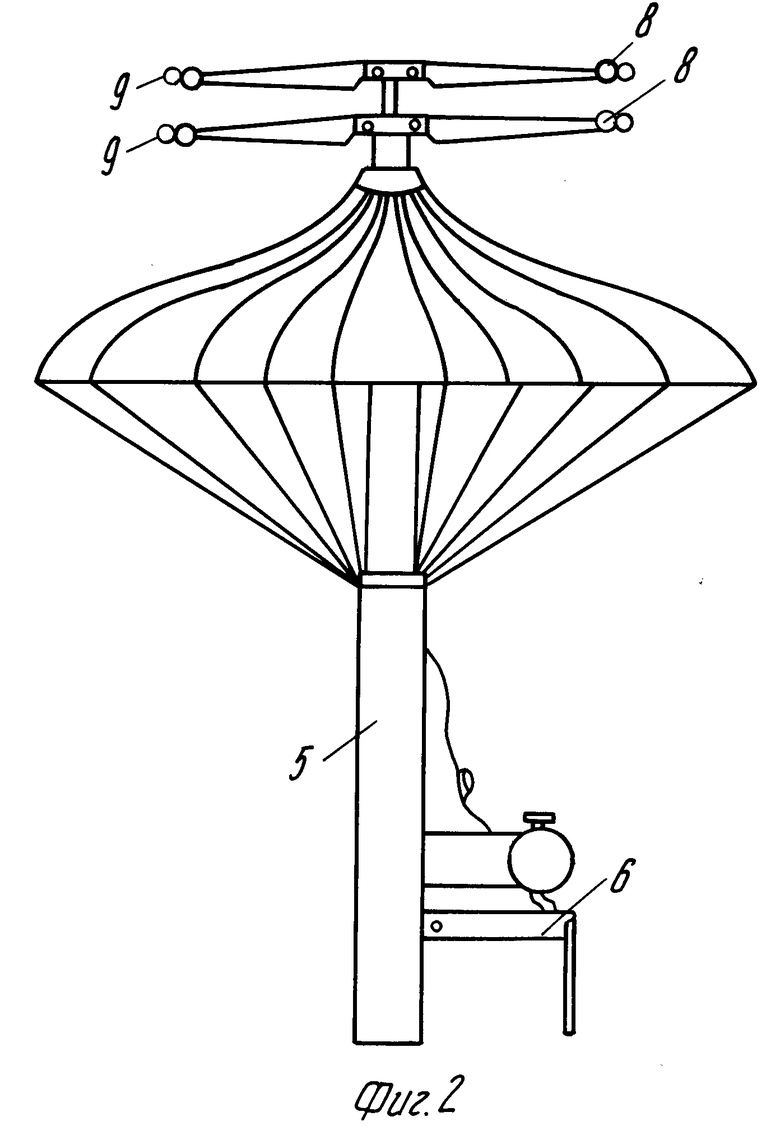
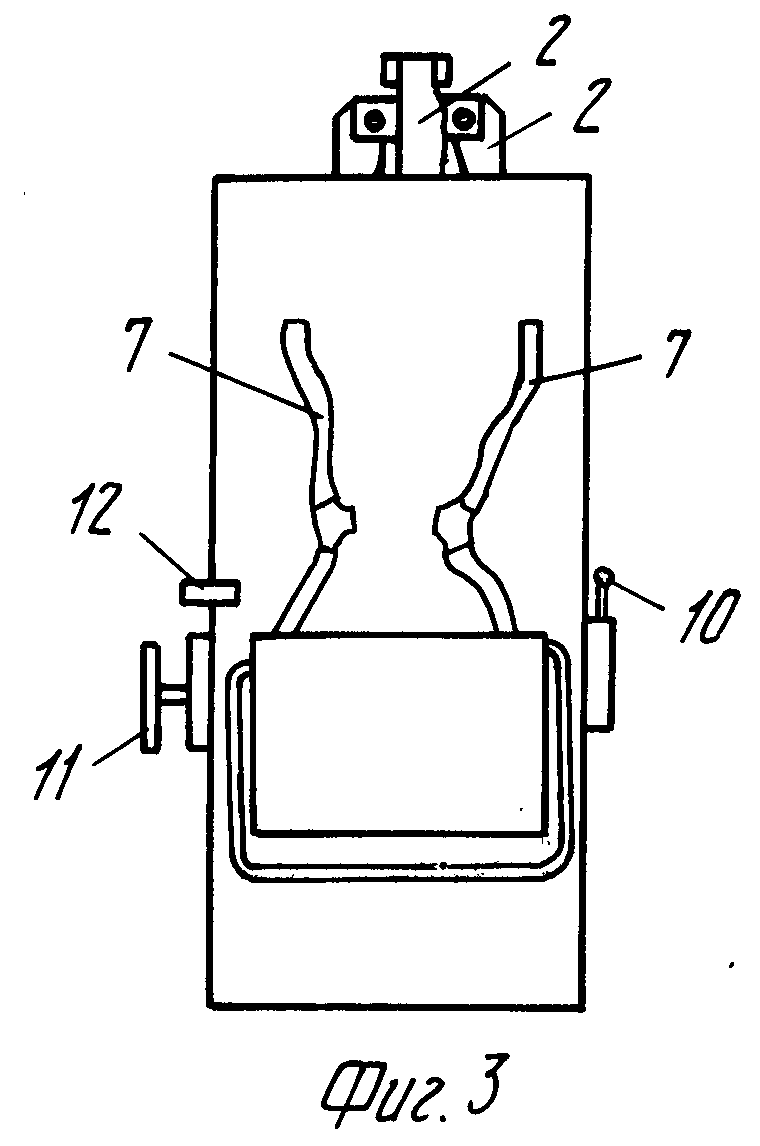
На фиг. 1 и 2 показаны две проекции летательного аппарата в рабочем положении.
Индивидуальный складывающийся летательный аппарат включает круглое, изготовленное из ткани, натянутой на складывающийся каркас, крыло 1, складывающиеся двухлопастные винты обдува крыла 2, шарнирно закрепленные на телескопических осях вращения 3, вращающихся в противоположные стороны, подвесную систему 4, корпус 5 с откидным сиденьем летчика 6 и привязными ремнями 7. На концах лопастей воздушных винтов установлены прямоточные воздушно-реактивные двигатели (ПВРД) 8 и пусковые ракетные двигатели твердого топлива 9. Топливный бак и система подачи топлива к ПВРД расположены внутри корпуса 5. Управление подачей топлива к ПВРД осуществляется с помощью рычага управления 10. Маховик 11 осуществляет изменение натяжения тросов подвесной системы на передней и задней поверхностях крыла для управления вектором подъемной силы крыла. Маховик 12 служит для управления поворотом летательного аппарата вокруг вертикальной оси. Привязные ремни 7 служат для фиксации летчика на летательном аппарате в полете и транспортировки летательного аппарата в сложенном виде на земле.
Летательный аппарат работает следующим образом.
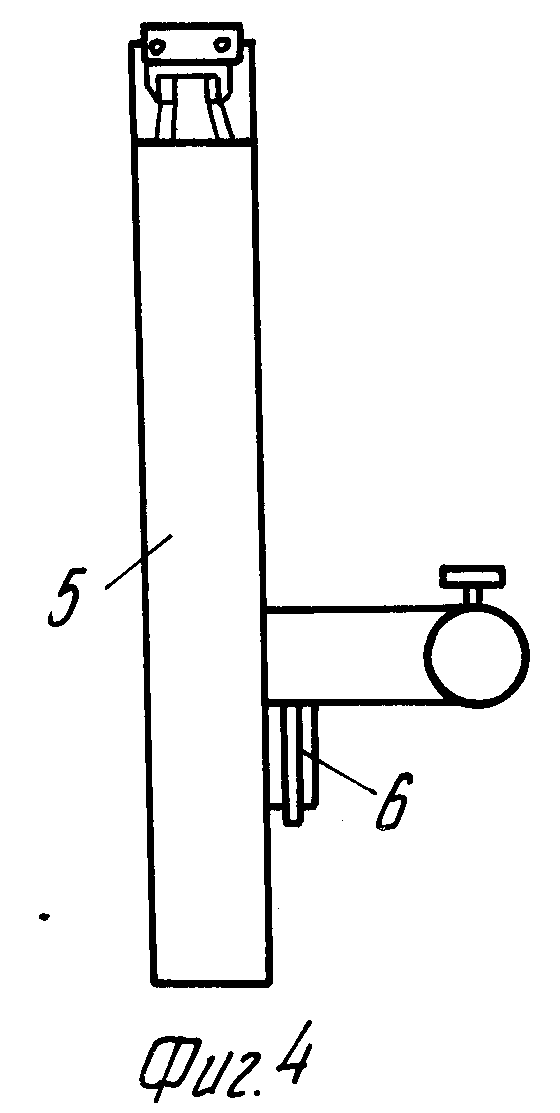
В транспортировочном положении (фиг. 3 и 4) каркас и обшивка круглого крыла 1 сложены (аналогично каркасу и обшивке зонта). Лопасти воздушных винтов 2 обдува крыла поворачиваются на шарнирах и располагаются вдоль осей вращения 3. Телескопическая конструкция осей вращения воздушных винтов позволяет убрать оси вместе со сложенным крылом 1 и сложенными лопастями винтов 2 внутрь корпуса 5. Сиденье летчика 6 в транспортировочном положении располагается вдоль корпуса летательного аппарата. Летчик может переносить летательный аппарат в cложенном виде с помощью привязных ремней 7.
В рабочем положении (фиг. 1) телескопические оси 3 винтов 2 выдвигаются из корпуса, крыло 1 раскрывается и принимает круглую в плане форму, лопасти воздушных винтов 2 поворачиваются на шарнирах и фиксируются в положении, перпендикулярном оси вращения. Сиденье летчика 6 также фиксируется в рабочем положении.
При воспламенении эарядов ракетных двигателей твердого топлива 9 они создают тягу и приводят во вращение воздушные винты 2. При вращении винтов 2, набегающих на концы их лопастей, поток воздуха тормозится во входных устройствах ПВРД 8, и давление воздуха повышается. При больших окружных скоростях концов лопастей винтов 2 давление воздуха в проточной части ПВРД 8 становится достаточным для осуществления его рабочего процесса. В этот момент производится запуск ПВРД. В дальнейшем привод воздушных винтов 2 осуществляется от ПВРД. Поток воздуха от воздушных винтов 2 обтекает круглое крыло 1 и благодаря эффекту Коанда создает на крыле подъемную силу. Подъемная сила летательного аппарата будет складываться из тяги двух винтов обдува крыла и вертикальной составляющей подъемной силы крыла.
Изменяя подачу топлива в камеру сгорания ПВРД рычагом управления 8, можно изменять тягу ПВРД и частоту вращения винтов. Изменение частоты вращения винтов приводит к изменению их тяги и скорости потока воздуха, обтекающего круглое крыло, а, значит, изменению подъемной силы крыла и подъемной силы летательного аппарата в целом.
Вращение воздушных винтов в противоположные стороны позволяет исключить реактивный момент и обеспечить путевую устойчивость ЛА без применения рулевого винта или рулевых аэродинамических поверхностей, что упрощает конструкцию, уменьшает ее габариты и массу.
Малые скорости горизонтального полета и малые размеры воздушных винтов позволяют отказаться от применения автомата перекоса винтов, и выполнить лопасти винтов с фиксированным шагом. Отказ от применения автомата перекоса также упрощает конструкцию, уменьшает ее габариты и массу.
Управление положением ЛА в пространстве осуществляется за счет его перемещений вверх-вниз, вперед-назад и поворотов вокруг вертикальной оси влево-вправо.
Перемещения вверх-вниз осуществляются за счет изменения подачи топлива в ПВРД рычагом управления 8, при этом изменяется тяга ПВРД, частота вращения винтов, а следовательно, и тяга винтов и подъемная сила крыла, т.е. подъемная сила летательного аппарата в целом.
Перемещения вперед-назад осуществляются за счет отклонения вперед-назад вектора подъемной силы круглого крыла, для этого маховиком 9 производится изменение натяжения тросов подвесной системы 4. Для перемещения летательного аппарата вперед натяжение тросов передней поверхности круглого крыла увеличивается, а задней уменьшается. При этом ось круглого крыла и вектор подъемной силы крыла отклоняются от вертикали и возникает горизонтальная составляющая подъемной силы крыла, направленная вперед и вызывающая горизонтальное перемещение летательного аппарата. Для перемещения назад натяжение тросов подвесной системы меняется на противоположное.
Для компенсации реактивного момента от винта на летательном аппарате предусмотрено наличие двух винтов, вращающихся в противоположные стороны.
Для управления поворотом летательного аппарата вокруг вертикальной оси используется крутящий момент винта. Для этого на летательном аппарате имеется специальное устройство, обеспечивающее передачу крутящего момента от одного или другого винта 2 на корпус 5. Включение этого устройства осуществляется маховиком 10, при повороте которого в одну сторону крутящий момент от одного из винтов передается на корпус 5, обеспечивая его поворот вокруг вертикальной оси. При повороте маховика в другую сторону крутящий момент передается от другого винта и корпус 5 поворачивается в другую сторону.
Предлагаемый летательный аппарат может быть использован для спасения экипажей самолетов и вертолетов после посадки, осуществления поисковых и аварийно-спасательных работ, десантирования и перемещения в труднодоступной местности.
Использование предлагаемого летательного аппарата обеспечивает по сравнению с прототипом следующие преимущества:
существенно уменьшаются габариты и масса летательного аппарата как в рабочем так и транспортировочном положении,
существенно упрощается конструкция и снижается стоимость летательного аппарата вследствие применения ПВРД вместо газотурбинного двигателя или двигателя внутреннего сгорания в качестве силовой установки,
предельно упрощается пилотирование летательным аппаратом.
Источники информации
1. Ромасевич В.Ф. Аэродинамика и динамика полета вертолета М. Воениздат, 1982.
2. Дельтам "ХАЗ-29". Харьков, ХАПО, 1989.
3. Патент США N 2547266, 1951.
Использование: в качестве индивидуального летательного аппарата, обеспечивающего вертикальный взлет, посадку и управляемый полет в воздухе. Сущность изобретения: аппарат является складывающимся и легкотранспортабельным, с круглым крылом, выполненным в виде зонтика, снабженного двумя несущими винтами противоположного вращения с реактивным приводом. 2 з.п. ф-лы, 4 ил.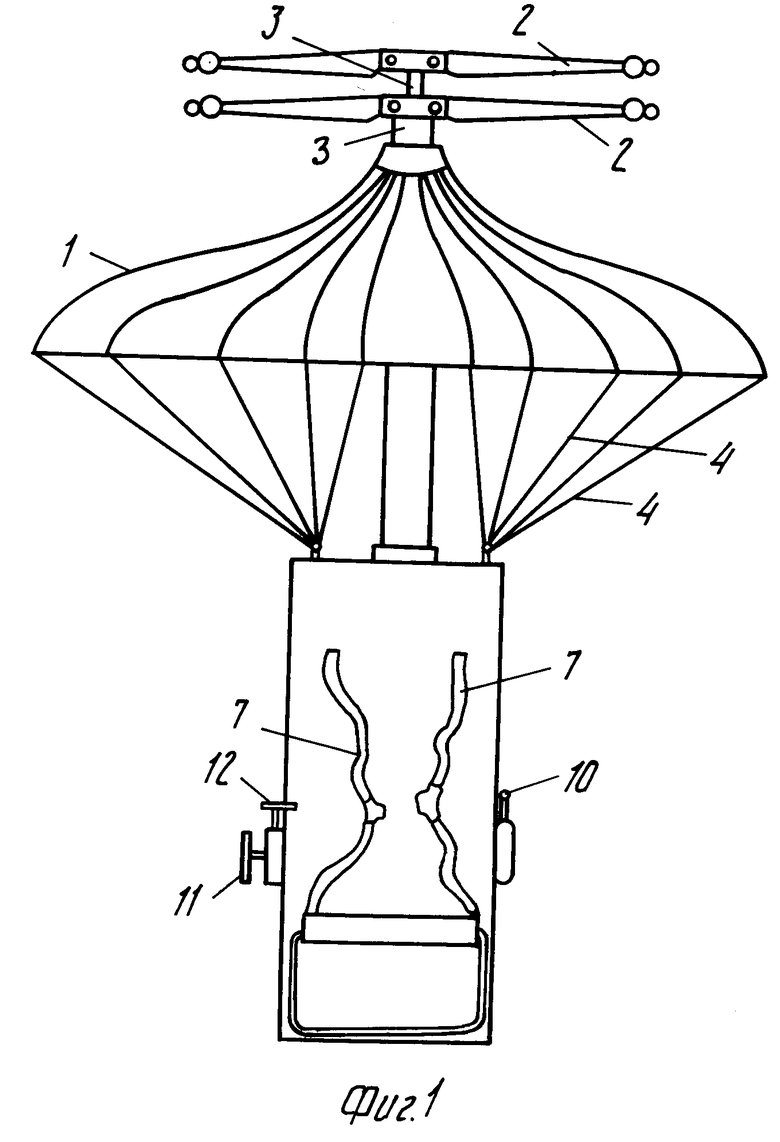
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Ромасевич В.Ф | |||
| Аэродинамика и динамика полета вертолета | |||
| - М.: Воениздат, 1982 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Дельтамт "ХАЗ" | |||
| - Харьков: ХАПО, 1989 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| СПОСОБ ПОЛУЧЕНИЯ 1,6-БИС-(1,5,3-ДИТИАЗЕПАН-3-ИЛ)-2,5-ДИСУЛЬФАНИЛГЕКСАНА, ОБЛАДАЮЩЕГО ФУНГИЦИДНОЙ АКТИВНОСТЬЮ | 2013 |
|
RU2547266C2 |
| Нагревательный прибор для центрального отопления | 1920 |
|
SU244A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Заявка ФРГ N 3521624, кл.B 64C 19/02. | |||
