Изобретение относится к области радиотехники и может быть использовано в системах синхронизации шкал времени пространственно разнесенных объектов.
Известен, см. например [1], способ, применяемый в радиоуправляемых часах при синхронизации шкалы времени часов относительно системной шкалы времени спутниковой радионавигационной системы. Способ основан на приеме сигналов спутниковой радионавигационной системы, выделении из принятых сигналов информации о системном времени и коррекции шкалы времени синхронизируемых часов на основе информации о системном времени и местоположении часов, определенном по сигналам спутниковой радионавигационной системы.
Известен, см. например [2], способ синхронизации шкал времени, применяемый в устройствах для привязки шкал времени пространственно разнесенных объектов. При реализации этого способа на ведущей станции передают временную информацию - синхронизирующие сигналы, в частности радиосигналы, соответствующие секундным меткам эталонной шкалы времени. На синхронизируемом объекте - ведомой станции принимают эти радиосигналы, определяют интервалы между метками времени собственной шкалы времени и принятыми радиосигналами, соответствующими секундным меткам эталонной шкалы времени, и на основе этих определений корректируют шкалу времени синхронизируемого объекта. Коррекцию осуществляют с учетом поправки на распространение радиосигналов ведущей станции, вычисляемой на основе априорно известного местоположения ведущей и ведомой станций и расстояния между ними.
Особенностью способов, представленных в [1], [2], является то, что они реализуются в условиях, когда априорно известно взаимное местоположение и/или расстояние между объектами, шкалы времени которых синхронизируются между собой с помощью радиосигналов, несущих временную информацию. Это позволяет на синхронизируемом объекте при известной скорости распространения радиоволн определять временную задержку на распространение сигналов, несущих временную информацию, и учитывать ее при осуществлении коррекции своей шкалы времени.
В тех случаях, когда взаимное местоположение и/или расстояние между синхронизируемыми объектами не определено, поправка на распространение синхронизирующих сигналов, т. е. сигналов, несущих информацию о времени, определяется, например, известным радиотехническим методом, основанным на равенстве времени распространения радиоволн в пространстве между антеннами в прямом и обратном направлениях.
Среди способов синхронизации шкал времени пространственно разнесенных объектов, использующих указанный радиотехнический метод определения временной задержки распространения сигналов, несущих информацию о времени, известен, см. например [3], способ, применяемый в устройствах автоматической сверки шкал времени. При реализации этого способа на эталонной станции формируют и излучают запросный сигнал, соответствующий метке времени эталонной шкалы времени. На синхронизируемом объекте принимают запросный сигнал и переизлучают его. При этом также излучают следующий после момента приема запросного сигнала собственный сигнал, соответствующий метке времени своей шкалы времени. Оба этих сигнала принимают на эталонной станции, где определяют время распространения запросного сигнала и расхождение сверяемых шкал времени. Полученные на эталонной станции данные о расхождении сверяемых шкал времени могут использоваться для последующей коррекции шкалы времени синхронизируемого объекта, например, путем передачи данных о расхождении шкал времени через соответствующий канал радиосвязи.
Таким образом, способ, реализованный в [3], может использоваться при решении задач, связанных с синхронизацией шкал времени пространственно разнесенных объектов, взаимное местоположение которых не определено. При этом, однако, в рамках этого способа в каждый конкретный промежуток времени может быть осуществлена сверка шкал времени и последующая синхронизация только одного объекта, синхронизация же другого объекта возможна в другой промежуток времени, специально отведенный для этой цели.
Известен способ синхронизации шкал времени, описанный в [4], который также позволяет решить задачу синхронизации шкал времени пространственно разнесенных объектов в условиях, когда их взаимное местоположение не определено, при этом, в отличие от [3] поправки для коррекции синхронизируемой шкалы времени определяются на самом синхронизируемом объекте.
Способ, описанный в [4], принят в качестве прототипа.
В способе, принятом в качестве прототипа, осуществляются следующие операции. На эталонной станции и синхронизируемом объекте формируют собственные шкалы времени в соответствии с сигналами местных опорных генераторов. На эталонной станции в соответствии с метками времени своей временной шкалы излучают сигналы синхронизирующих меток времени.
На синхронизируемом объекте принимают сигналы синхронизирующих меток времени и определяют интервал времени τ1 между метками времени собственной шкалы времени и моментами времени приема от эталонной станции сигналов синхронизирующих меток времени.
Затем на синхронизируемом объекте излучают сигналы запроса, в качестве которых используют переизлучаемые сигналы принятых синхронизирующих меток времени.
Сигналы запроса, т.е. переизлученные синхронизируемым объектом сигналы синхронизирующих меток времени, принимают на эталонной станции и переизлучают их.
На синхронизируемом объекте принимают переизлученные сигналы запроса, т. е. дважды переизлученные сигналы синхронизирующих меток времени, и измеряют интервалы времени τ2 между излучениями сигналов запроса и их обратным приемом, которые представляют собой удвоенные интервалы времени распространения сигналов синхронизирующих меток времени. По результатам измерений τ1 и τ2 вычисляют поправку для коррекции шкалы времени синхронизируемого объекта: -(τ1-τ2/2).
По результатам вычислений поправки производят коррекцию шкалы времени синхронизируемого объекта.
Таким образом, в способе-прототипе решается задача синхронизации временных шкал пространственно разнесенных объектов в условиях, когда их взаимное местоположение не определено.
При этом так же как и в известном решении [3], в каждый конкретный промежуток времени синхронизация возможна только в отношении одного синхронизируемого объекта. Обусловлено это, в частности, тем, что сигналы, используемые в способе-прототипе для передачи временной информации, не являются адресными, и в этом смысле не обладают различительной способностью.
Заявляемое изобретение направлено на решение задачи обеспечения возможности синхронизации шкал времени N объектов (N ≥ 1) с неопределенным относительно эталонной станции местоположением в условиях, когда для синхронизации конкретного объекта не выделяется соответствующее временное окно.
Сущность изобретения состоит в том, что в способе синхронизации шкал времени, заключающемся в том, что формируют на эталонной станции и синхронизируемом объекте собственные временные шкалы в соответствии с сигналами местных опорных генераторов, на эталонной станции излучают в соответствии со своей временной шкалой сигналы синхронизирующих меток времени, на синхронизируемом объекте принимают сигналы синхронизирующих меток времени и измеряют интервалы времени τ1 между метками времени собственной шкалы времени синхронизируемого объекта и моментами времени приема от эталонной станции сигналов синхронизирующих меток времени, излучают на синхронизируемом объекте сигналы запроса, принимают сигналы запроса на эталонной станции и переизлучают их, принимают переизлученные сигналы запроса на синхронизируемом объекте и измеряют интервалы времени τ2 между излучениями сигналов запроса и их обратным приемом, а по результатам измерений вычисляют поправку для коррекции временной шкалы синхронизируемого объекта, на синхронизируемом объекте формируют сигналы запроса в виде радиосигналов с характерной для данного синхронизируемого объекта кодовой модуляцией частоты и/или фазы, и/или времени формирования и излучают их в промежутках времени между принимаемыми сигналами синхронизирующих меток времени, на эталонной станции принятые сигналы запроса переизлучают с задержкой на время τ3, априорно известной на синхронизируемом объекте, при этом на синхронизируемом объекте измерение интервалов времени τ2 между излучениями сигналов запроса и их обратным приемом осуществляют путем корреляционных измерений задержек принятых переизлученных сигналов запроса, а коррекцию временной шкалы синхронизируемого объекта производят по результатам измерений каждого из интервалов времени τ1 и τ2, осуществленных после каждого приема сигнала синхронизирующей метки времени, вычислив поправку τи для коррекции временной шкалы по формуле:
τи = -[τ1-(τ2-τ3)/2].
Сущность заявляемого способа, возможность его осуществления и промышленного использования поясняются представленной на чертеже структурной схемой системы синхронизации шкал времени N синхронизируемых объектов в одном из возможных вариантов ее реализации.
Система, иллюстрирующая осуществимость заявляемого способа, содержит (см. чертеж) N синхронизируемых объектов 1 (11, 12, ... , 1N) и эталонную станцию 2.
Каждый из N синхронизируемых объектов 1 (11, 12, ..., 1N) содержит опорный генератор 3, формирователь 4 местной шкалы времени, блок 5 коррекции местной шкалы времени, формирователь 6 кода коррекции, приемник 7, передатчик 8, блок 9 выделения сигналов синхронизирующих меток времени, блок 10 измерения интервалов времени τ1 между метками местной шкалы времени и моментами времени приема сигналов синхронизирующих меток времени, блок 11 измерения интервалов времени τ2 между излучениями сигналов запроса и их обратным приемом, формирователь 12 идентификационного кода объекта, ключ 13 и формирователь 14 сигналов запроса.
Формирователь 14 сигналов запроса содержит формирователь 15 сигнала несущей частоты, формирователь импульсов 16 и блок 17 модуляции. Вход формирователя 15 образует первый вход формирователя 14, вход формирователя импульсов 16 образует второй вход формирователя 14, вход кодовых сигналов блока 17 модуляции образует третий вход (вход кодовых сигналов) формирователя 14, выход блока 17 модуляции образует информационный выход формирователя 14, а выход формирователя импульсов 16 образует управляющий выход формирователя 14. При этом управляющий вход блока 17 модуляции соединен с выходом формирователя импульсов 16, а вход сигнала несущей частоты блока 17 модуляции соединен с выходом формирователя 15 сигнала несущей частоты.
В каждом из N синхронизируемых объектов 1 (11, 12, ..., 1N) выход опорного генератора 3 подключен к входу формирователя 12 идентификационного кода объекта, к первому входу формирователя 14 сигналов запроса, т.е. к входу формирователя 15 сигнала несущей частоты, к опорному входу блока 5 коррекции местной шкалы времени и к опорному входу блока 10.
Выход блока 5 коррекции местной шкалы времени подключен к входу формирователя 4 местной шкалы времени, управляющий вход блока 5 подключен к выходу формирователя 6 кода коррекции, первый и второй входы формирователя 6 подключены соответственно к выходам блоков 10 и 11.
Первый и второй измерительные входы блока 10 подключены соответственно к выходу формирователя 4 местной шкалы времени и к выходу блока 9 выделения сигналов синхронизирующих меток времени.
Вход блока 9 выделения сигналов синхронизирующих меток времени подключен к выходу приемника 7. Выход приемника 7 через ключ 13 подключен также к сигнальному входу блока 11.
Выход блока 9 выделения сигналов синхронизирующих меток времени подключен также к второму входу формирователя 14 сигналов запроса, т.е. к входу формирователя импульсов 16.
Информационный выход формирователя 14 сигналов запроса, т.е. выход блока 17 модуляции, подключен к входу передатчика 8. Управляющий выход формирователя 14 сигналов запроса, т.е. выход формирователя импульсов 16 подключен к управляющему входу ключа 13.
Выход формирователя 12 идентификационного кода объекта подключен к третьему входу формирователя 14 сигналов запроса, т.е. к входу кодовых сигналов блока 17 модуляции, а также к входу кодовых сигналов блока 11.
Эталонная станция 2 содержит канал формирования синхронизирующих меток времени в составе последовательно соединенных опорного генератора 18, формирователя 19 эталонной шкалы времени и формирователя 20 синхронизирующих меток времени, а также канал приема переизлучаемых сигналов запроса в составе последовательно включенных антенного коммутатора 21, приемника 22 и блока 23 задержки. Информационный выход формирователя 20 и выход блока 23 задержки через объединитель каналов 24 подключены к входу передатчика 25, а управляющий выход формирователя 20 подключен к управляющему входу антенного коммутатора 21.
На эталонной станции 2 опорный генератор 18, формирователь 19 эталонной шкалы времени, формирователь 20 синхронизирующих меток времени, объединитель каналов 24 и передатчик 25 выполняют функцию формирования и излучения в эфир радиоимпульсных сигналов синхронизирующих меток времени, а антенный коммутатор 21, приемник 22, блок 23 задержки совместно с объединителем каналов 24 и передатчиком 25 - функцию приема и переизлучения в эфир радиоимпульсных сигналов запроса от N синхронизируемых объектов 1.
На эталонной станции 2 опорный генератор 18 совместно с формирователем 19 решают известную задачу формирования временных меток эталонной шкалы времени. При этом опорный генератор 18 может быть выполнен в виде стандарта частоты, например в виде атомного стандарта частоты с относительной нестабильностью частоты 10-12 - 10-14, а формирователь 19 - в виде делителя (умножителя) частоты, реализованного, например, на счетчиках (счетных регистрах), с одного из выходов которого снимаются i-е секундные импульсы, используемые в формирователе 20 для формирования сигналов синхронизирующих меток времени.
На эталонной станции 2 формирователь 20 синхронизирующих меток времени решает задачу формирования радиоимпульсных сигналов синхронизирующих меток времени с несущей частотой f0 и временным положением, соответствующим выходным сигналам формирователя 19 - i-м секундным меткам эталонной шкалы времени. При этом также решается задача формирования видеоимпульсов, соответствующих сигналам синхронизирующих меток времени, для управления антенным коммутатором 21. Задача может решаться, например, с помощью входящих в состав формирователя 20 формирователя синусоидального сигнала несущей частоты f0, формирователя импульсов заданной длительности, например одновибратора, и амплитудного модулятора (на чертеже не показаны), образующих в совокупности структуру, аналогичную структуре формирователя 14 в синхронизируемом объекте 1. При этом в качестве опорных сигналов, используемых при формировании частоты f0, могут использоваться при необходимости сигналы опорного генератора 18 (на фигуре эта связь не показана как несущественная). В этом случае входом формирователя 20 будет служить вход указанного формирователя импульсов, информационным выходом - выход указанного амплитудного модулятора, а управляющим выходом - выход указанного формирователя импульсов.
Антенный коммутатор 21, приемник 22 и блок 23 задержки эталонной станции 2 осуществляют функцию приема из эфира радиоимпульсных сигналов запроса, излученных передатчиками 8 синхронизируемых объектов 1 на несущей частоте f0, и их временной задержки для последующего переизлучения. При этом приемник 22, решающий обычную радиотехническую задачу по селективному приему широкополосных радиоимпульсных сигналов - радиоимпульсных сигналов запроса, может быть реализован в виде КВ-приемника с полосой пропускания, согласованной со спектром принимаемых сигналов запроса. Антенный коммутатор 21 при этом осуществляет функцию прерывания входной цепи приемника 22 на время излучения опорной станцией 2 собственных сигналов синхронизирующих меток времени и может быть реализован в виде электронного ключа, управляемого напряжением. Блок 23 задержки осуществляет функцию задержки на время τ3 переизлучаемых сигналов запроса и может быть реализован аналогично, например, линиям задержки, описанным в [5, с.352-360, рис.21.9, 21.13].
Объединитель каналов 24 эталонной станции 2 решает задачу гальванической развязки выходов формирователя 20 и блока 23. Объединитель каналов 24 может быть реализован, например, по обычной схеме аналогового сумматора на операционном усилителе с резисторами на входе и в цепи отрицательной обратной связи.
Передатчик 25 эталонной станции 2, решающий общеизвестную задачу усиления радиосигналов по мощности и излучения их в эфир, в данном случае - сигналов синхронизирующих меток времени и переизлучаемых сигналов запроса, передаваемых на несущей частоте f0, может быть реализован аналогично выходным устройствам известных связных КВ-радиостанций, например аналогично выходному усилителю мощности с соответствующей антенной КВ-радиостанции типа "Микрон" [6, с.42-44, рис.1.2.3; с.80-82, рис.1.2.21].
В каждом из N синхронизируемых объектов 1 (11, 12, ..., 1N) опорный генератор 3, формирователь 4 местной шкалы времени и блок 5 коррекции местной шкалы времени решают общеизвестную задачу формирования и коррекции местной шкалы времени, см. например [4, элементы 7-9]. При этом опорный генератор 3 в зависимости от назначения объекта может быть выполнен в виде атомного стандарта частоты (аналогично генератору 18 эталонной станции 2) или в виде кварцевого генератора. Формирователь 4 местной шкалы времени может быть выполнен в виде делителя (умножителя) частоты, реализованного, например, на счетчиках (счетных регистрах), с одного из выходов которого снимаются i-е секундные импульсы, используемые в блоке 10 при измерениях интервалов времени τ1 между метками местной шкалы времени и моментами времени приема сигналов синхронизирующих меток времени от эталонной станции 2. Блок 5 коррекции местной шкалы времени может быть выполнен в виде фазосдвигающего блока, управляемого кодом коррекции, аналогично, например, устройству для коррекции шкалы времени, описанному в [7].
В каждом из N синхронизируемых объектов 1 (11, 12, ..., 1N) приемник 7 решает общеизвестную задачу частотной селекции, частотного преобразования с понижением частоты (при необходимости) и усиления принимаемых из эфира радиосигналов [8, с. 11-15, рис. 1.7], в данном случае - сигналов, излучаемых передатчиком 25 эталонной станции 2, т.е. сигналов синхронизирующих меток времени и переизлученных сигналов запроса, передаваемых на несущей частоте f0. Приемник 7 может быть реализован, например, по схеме, аналогичной схеме первого каскада КВ-приемника связной радиостанции типа "Микрон" [6, с.72-80, рис.1.2. 17].
В каждом из N синхронизируемых объектов 1 (11, 12, ..., 1N) блок 9 выделения сигналов синхронизирующих меток времени решает обычную радиотехническую задачу выделения из совокупности принимаемых радиосигналов радиоимпульсных сигналов с известными параметрами - несущей частотой f0 и уровнем, превышающим заданный пороговый уровень, а также преобразования этих сигналов в видеоимпульсы, временное положение которых соответствует временному положению выделенных радиоимпульсных сигналов. Функционально блок 9 может быть выполнен, например, в виде узкополосного полосового фильтра, квадратичного детектора и порогового блока, осуществляющего сравнение продетектированного сигнала с пороговым уровнем и формирование соответствующего видеоимпульсного сигнала синхронизирующей метки времени при превышении продетектированного сигнала порогового уровня.
В каждом из N синхронизируемых объектов 1 (11, 12, ..., 1N) блок 10 решает задачу измерения интервалов времени τ1 между метками местной шкалы времени, формируемыми формирователем 4, и видеоимпульсными сигналами синхронизирующих меток времени, формируемыми блоком 9 в соответствии с принимаемыми радиоимпульсными сигналами синхронизирующих меток времени от эталонной станции 2. Задача может решаться известными средствами, например аналогично известным преобразователям временного интервала в код [9, с. 125-128, рис. 4.9; 4.10; 4.11] путем подсчета числа импульсов, поступающих на опорный вход блока 10 с выхода опорного генератора 3 и попадающих во временной интервал, ограниченный с одной стороны фронтом i-го секундного импульса, поступающего на первый измерительный вход блока 10 с выхода формирователя 4 местной шкалы времени, а с другой - фронтом видеоимпульсного сигнала синхронизирующей метки времени, поступающего на второй измерительный вход блока 10 с выхода блока 9, с последующим формированием выходного сигнала блока 10 в виде кода значения измеренного временного интервала, пропорционального числу подсчитанных импульсов.
В каждом из N синхронизируемых объектов 1 (11, 12, ..., 1N) формирователь 14 сигналов запроса решает задачу формирования радиосигналов с характерной кодовой модуляцией частоты и/или фазы, и/или времени. При этом входящий в его состав формирователь импульсов 16 решает задачу формирования видеоимпульсов, определяющих временные интервалы, в течение которых осуществляется формирование и излучение сигналов запроса. Формирователь 15 сигнала несущей частоты решает задачу формирования синусоидального сигнала частотой fo, являющейся несущей частотой для формируемых в блоке 17 модулированных радиосигналов. Блок 17 модуляции решает задачу формирования радиоимпульсных сигналов с характерной для данного объекта кодовой модуляцией частоты и/или фазы и/или времени формирования, т.е. решает задачу формирования собственно сигналов запроса. Для осуществления указанной функции блок 17 может быть выполнен аналогично модуляторам, используемым в системах связи с широкополосными (шумоподобными) сигналами, описанным, например, в [5, с.16-19, рис.1.9а, 1.11а] . При этом информационный вход описанных в [5, с.16-19, рис.1.9а, 1.11а] модуляторов является управляющим входом блока 17, соединенным с выходом формирователя 16, вход кодовых сигналов - входом кодовых сигналов блока 17, соединенным с выходом формирователя 12, а вход сигнала несущей частоты - входом сигнала несущей частоты блока 17, соединенным с выходом формирователя 15. Формирователь 16 может быть выполнен в виде формирователя импульсов заданной длительности, например в виде одновибратора, а формирователь 15 - в виде последовательно соединенных делителя (умножителя) частоты, реализованного, например, на счетчиках (счетных регистрах), и фильтрующей цепи, реализованной в виде полосового фильтра с центральной частотой f0.
Формирователь 12 идентификационного кода объекта решает задачу, аналогичную известной для асинхронных адресных систем связи задаче кодового разделения абонентов [5, с.10, рис.1.3], [10, с.35], [11, с.13-14, рис.2], [12, с. 78-83] , т.е. задачу формирования характерного только для данного объекта кода. Этот код используется в объекте 1 для кодовой модуляции формируемых и излучаемых сигналов запроса, а также для последующей корреляционной обработки принимаемых переизлученных сигналов запроса. В простейшем случае в качестве формирователя 12 может использоваться, например, формирователь кода, описанный в [5, с. 47, рис. 3.11]. Могут также использоваться более сложные, чем описанные в [5, с. 47], формирователи кодов, аналогичные, например, формирователям, применяемым для формирования идентификационных кодов спутников в спутниковой радионавигационной системе "Навстар" [10, с.35], [11, с.13-14, рис. 2, 3].
Передатчики 8 синхронизируемых объектов 1 решают общеизвестную задачу усиления радиосигналов по мощности и излучения их в эфир, в данном случае - радиоимпульсных сигналов запроса с несущей частотой f0. В качестве передатчиков 8 могут использоваться выходные устройства (усилители мощности с антеннами), аналогичные соответствующим устройствам связных КВ-радиостанций, например выходное устройство КВ-радиостанций типа "Микрон" [6, с. 42-44, рис.1.2.3; с.80-82, рис.1.2.21].
В каждом из N синхронизируемых объектов 1 (11, 12, ..., 1N) блок 11 решает задачу измерения задержки τ2 между моментами излучения объектом собственных сигналов запроса и моментами их обратного приема. Задача решается обычным корреляционным методом, основанным на выработке отсчетов взаимной корреляционной функции принимаемого и образцового сигналов, соответствующих заданной величине временного сдвига между ними [12, с. 81]. При этом принимаемым сигналом является сигнал, поступающий с выхода приемника 7 через ключ 13, образцовым сигналом является сигнал, поступающий с выхода формирователя 12 идентификационного кода объекта, а измеряемой величиной является величина временного сдвига образцового сигнала, соответствующая максимуму взаимной корреляционной функции этих сигналов. Задача решается с помощью входящих в состав блока 11 корреляционного обнаружителя, программируемой (перестраиваемой) линии задержки и устройства управления - синхронизатора (на чертеже не показаны), образующих общеизвестную схему замкнутой следящей системы корреляционного поиска и обнаружения кодированных сигналов, см. , например, [5, с.266-271, рис.15.3], [8, с.24, рис. 2.1; с. 86, рис. 3.1] . В этой замкнутой следящей системе информационный вход корреляционного обнаружителя образует сигнальный вход блока 11, опорный вход корреляционного обнаружителя подключен к выходу линии задержки, сигнальный вход линии задержки образует вход кодовых сигналов блока 11, а управляющий вход подключен к выходу устройства управления - синхронизатора, образующего выход блока 11, при этом вход устройства управления - синхронизатора подключен к выходу корреляционного обнаружителя. Корреляционный обнаружитель в этой следящей системе может быть реализован известными стандартными средствами, например аналогично описанным в [8, с.82, рис.2.14], т.е. с помощью последовательно включенных умножительного и накопительного блоков с пороговым элементом на выходе, где сигнальный вход умножительного блока - это вход корреляционного обнаружителя, а выход порогового элемента - это выход корреляционного обнаружителя. Все указанные функциональные элементы блока 11 - корреляционный обнаружитель, программируемая линия задержки, синхронизатор (устройство управления) могут быть реализованы, например, на базе цифровой техники, аналогичной применяемой при решении подобных задач в устройствах обработки сигналов спутниковых радионавигационных систем [10, с. 124, рис. 8.3], [11, с. 87-90, рис. 32,33]. При этом в качестве опорных сигналов, синхронизирующих работу указанных цифровых устройств, могут использоваться при необходимости сигналы опорного генератора 3 (на чертеже эта связь не показана как несущественная).
В каждом из N синхронизируемых объектов 1 (11, 12, ..., 1N) формирователь 6 кода коррекции решает задачу формирования сигнала (кода) поправки τи на основе измеренных значений временных интервалов τ1, τ2, полученных в блоках 10, 11, а также априорно известного на каждом объекте 1 значения временной задержки τ3. Формирователь 6 кода коррекции представляет собой цифровое вычислительное устройство, работающее с кодированными сигналами, выполненное, например, на базе микропроцессорной техники [9, с.196-197]. Это вычислительное устройство в соответствии с программой, записанной в его памяти, вычисляет значение поправки τи и формирует выходной сигнал в виде кода поправки, под действием которого в блоке 5 осуществляется временной сдвиг импульсов, используемых далее в формирователе 4 для формирования меток времени местной шкалы времени. Тем самым осуществляется требуемая коррекция местной шкалы времени синхронизируемого объекта 1 на величину поправки.
Синхронизацию шкал времени N синхронизируемых объектов 1 (11, 12, ..., 1N) по заявляемому способу осуществляют следующим образом.
На эталонной станции 2 и каждом из N синхронизируемых объектов 1 (11, 12, . .., 1N) формируют собственные временные шкалы в соответствии с сигналами местных опорных генераторов. На эталонной станции 2 эти операции осуществляются с помощью опорного генератора 18 и формирователя 19 эталонной шкалы времени, а на каждом из N синхронизируемых объектов 1 - с помощью опорного генератора 3, формирователя 4 местной шкалы времени и блока 5 коррекции местной шкалы времени. При этом на эталонной станции 2 опорный генератор 18 формирует на своем выходе импульсные сигналы, например, с частотой 5 МГц, а формирователь 19 - импульсы (метки) опорной шкалы времени, в том числе i-ые секундные метки, используемые в формирователе 20 для формирования сигналов синхронизирующих меток времени.
На каждом из N синхронизируемых объектов 1 опорный генератор 3 формирует на своем выходе импульсные сигналы, например, с частотой 5 МГц, которые с помощью блока 5 и формирователя 4 преобразуются в импульсы (метки) местной шкалы времени, временное положение которых в начальный момент не совпадает с временным положением аналогичных импульсов (меток) эталонной шкалы времени, т. е. шкалы времени объектов 1 и эталонной станции 2 в начальный момент не синхронизированы.
Для синхронизации шкал времени в рамках заявляемого способа осуществляют следующие операции.
На эталонной станции 2 в соответствии с ее временной шкалой, например в соответствии с каждой i-й секундной меткой, формируют и излучают в эфир радиоимпульсные сигналы синхронизирующих меток времени, представляющие собой радиоимпульсные сигналы с несущей частотой f0. Осуществляется эта операция с помощью формирователя 20 синхронизирующих меток времени и передатчика 25. При этом сформированные формирователем 20 радиоимпульсные сигналы через объединитель каналов 24 поступают на вход передатчика 25, который излучает их в эфир. Для исключения приема этих же сигналов приемником 22 антенный коммутатор 21 размыкается на время передачи сигналов синхронизирующих меток времени. Размыкание осуществляется сигналом, поступающим на управляющий вход антенного коммутатора 21 с управляющего выхода формирователя 20.
На каждом из N синхронизируемых объектов 1 с помощью приемника 7 принимают радиоимпульсные сигналы синхронизирующих меток времени, излученные передатчиком 25 эталонной станции 2, и с помощью блока 9 формируют соответствующие им видеоимпульсные сигналы синхронизирующих меток времени.
После каждого приема радиоимпульсного сигнала синхронизирующей метки времени, излученного передатчиком 25 эталонной станции 2, и формирования блоком 9 соответствующего видеоимпульсного сигнала синхронизирующей метки времени на каждом из синхронизируемых объектов 1 осуществляют измерение интервалов времени τ1 между метками времени собственной шкалы времени и моментами времени приема от эталонной станции 2 сигналов синхронизирующих меток времени. Эти измерения осуществляют в блоке 10 путем измерения временного интервала, ограниченного с одной стороны фронтом i-го секундного импульса, поступающего на первый измерительный вход блока 10 с выхода формирователя 4, а с другой - фронтом видеоимпульсного сигнала синхронизирующей метки времени, поступающего на второй измерительный вход блока 10 с выхода блока 9, с последующим формированием выходного сигнала блока 10 в виде кода значения измеренного временного интервала.
Результаты измерений интервала времени τ1 в виде кода подаются с выхода блока 10 на первый вход формирователя 6 кода коррекции. При каждом приеме сигнала синхронизирующей метки времени на каждом из синхронизируемых объектов 1 формируют и излучают радиоимпульсные сигналы запроса - радиосигналы с характерной для данного объекта кодовой модуляцией частоты и/или фазы, и/или времени формирования. Излучение этих сигналов осуществляют в промежутках времени между принимаемыми сигналами синхронизирующих меток времени.
Формирование радиоимпульсных сигналов запроса с характерной для данного объекта кодовой модуляцией осуществляется в формирователе 14 сигналов запроса с помощью входящих в его состав формирователя импульсов 16, формирователя 15 сигнала несущей частоты и блока 17 модуляции, а также с помощью формирователя 12 идентификационного кода объекта. При этом видеоимпульсный сигнал синхронизирующей метки времени с выхода блока 9 подается на вход формирователя 16, на выходе которого формируется видеоимпульс, определяющий временной интервал, в течение которого осуществляется формирование и излучение радиоимпульсного сигнала запроса в промежутках между принимаемыми сигналами синхронизирующих меток времени. Видеоимпульс с выхода формирователя 16 подается далее на управляющий вход блока 17 модуляции, на вход сигнала несущей частоты которого с выхода формирователя 15 подается синусоидальный сигнал частоты f0, являющейся несущей для формируемых в блоке 17 радиоимпульсных сигналов запроса, а на вход кодовых сигналов с выхода формирователя 12 идентификационного кода объекта подается характерный для данного объекта код для кодовой модуляции частоты и/или фазы, и/или времен формирования формируемых в блоке 17 радиоимпульсных сигналов запроса.
Сформированные таким образом на каждом из N синхронизируемых объектов 1 радиоимпульсные сигналы запроса излучаются в эфир передатчиками 8.
Эти сигналы характеризуются общей для всех сигналов запроса несущей частотой f0 и отличаются индивидуальными кодами модуляции частоты и/или фазы, и/или времени формирования, что позволяет осуществить их последующее различение.
Сигналы запроса от N синхронизируемых объектов 1 принимают на эталонной станции 2 с помощью приемника 22 в периоды, когда антенный коммутатор 21 замкнут. Далее эти сигналы задерживают на время τ3 с помощью блока 23 задержки и через объединитель каналов 24 подают на вход передатчика 25, который и переизлучает их.
Все переизлученные сигналы запроса поступают на входы приемников 7 на каждом из N объектов 1, где фильтруются и усиливаются. После этого с помощью блока 11 в каждом из N синхронизируемых объектов 1 осуществляются измерения интервалов времени (задержек) τ2 между моментами излучения объектом собственных сигналов запроса и моментами их обратного приема.
Для исключения влияния на результаты измерений τ2 тех собственных сигналов запроса, которые принимаются приемником 7 данного объекта 1 непосредственно в моменты их излучения передатчиком 8, осуществляется соответствующее размыкание ключа 13 на все время их формирования и излучения в эфир. Размыкание ключа 13 осуществляется с помощью управляющего сигнала, формируемого на выходе формирователя 16 после приема и выделения сигналов синхронизирующих меток времени, т.е. после формирования на выходе блока 9 соответствующих видеоимпульсных сигналов синхронизирующих меток времени.
Таким образом измерения τ2 осуществляются в блоке 11 каждый раз после замыкания ключа 13, т. е. каждый раз после окончания процесса излучения в эфир сигнала запроса, сформированного после приема соответствующего сигнала синхронизирующей метки времени.
Измерение интервалов времени τ2 осуществляется в блоке 11 с помощью входящих в его состав корреляционного обнаружителя, устройства управления - синхронизатора и программируемой (перестраиваемой) линии задержки (на чертеже не показаны) путем корреляционных измерений задержек принятых переизлученных сигналов запроса по отношению к образцовым сигналам, формируемым формирователем 12. Измеряемая задержка при этом определяется как установившееся значение выходного сигнала (кода) устройства управления - синхронизатора, при котором программируемая линия задержки задерживает сигнал формирователя 12 так, что на выходе корреляционного обнаружителя устанавливается максимум сигнала автокорреляционного пика.
Результаты измерений интервала времени τ2 в виде кода подаются с выхода блока 11 на второй вход формирователя 6 кода коррекции.
В формирователе 6 кода коррекции вычисляется значение поправки τи для коррекции временной шкалы синхронизируемого объекта 1 по формуле:
τи = -[τ1-(τ2-τ3)/2],
где τ3 - априорно известное на каждом синхронизируемом объекте 1 значение задержки сигнала запроса на эталонной станции 2.
По результатам вычислений поправки τи на выходе формирователя 6 формируется сигнал (код) коррекции, под действием которого в блоке 5 осуществляется временной сдвиг импульсов, поступающих на вход формирователя 4 местной шкалы времени, что приводит к требуемой коррекции местной шкалы времени синхронизируемого объекта 1 на величину поправки τи. Тем самым осуществляется синхронизация местной шкалы времени синхронизируемого объекта 1 по отношению к эталонной шкале времени эталонной станции 2.
Указанные операции параллельно осуществляются на всех N синхронизируемых объектах 1.
Таким образом из рассмотренного видно, что заявляемый способ осуществим, промышленно реализуем и решает поставленную задачу. При этом в отличие от способа-прототипа при реализации заявляемого способа может осуществляться синхронизация N объектов (N ≥ 1) с неопределенным относительно эталонной станции местоположением в условиях, когда для синхронизации конкретного объекта не выделяется соответствующее временное окно.
Следует отметить, что представленный на чертеже пример реализации заявляемого способа не является единственным. Возможны и другие, альтернативные, реализации способа. В частности, для отделения сигналов синхронизирующих меток времени от сигналов запроса может применяться отличная от f0 несущая частота, например f1 ≠ f0. В этом случае центральная частота узкополосного фильтра блока 9 устанавливается равной частоте f1. Возможные неточности в определении времени распространения сигналов синхронизирующих меток времени по времени распространения сигналов запроса, возникающие из-за разницы в несущих частотах f1 и f0, могут учитываться в формируемом коде коррекции в виде определенных поправочных коэффициентов, значения которых могут быть получены, например, расчетным путем. Кроме того, на эталонной станции 2 должен дополнительно использоваться передатчик для излучения на частоте f1.
Источники информации
1. Заявка Германии N 4202435, G 04 C 11/02, G 04 G 7/02, опубл. 05.08.93.
2. Патент РФ N 2046393, G 04 C 11/02, опубл. 20.10.95.
3. Авт. свид. СССР N 1464136, G 04 C 11/02, опубл. 07.03.89.
4. Авт. свид. СССР N 1712942, G0 4 C 11/02, Н 04 L 7/02, опубл. 15.02.92. (Прототип).
5. Варакин Л. Е. Системы связи с шумоподобными сигналами. М., Радио и связь, 1985.
6. Софронов Н.А. Радиооборудование самолетов. М., Машиностроение, 1978.
7. Авт. свид. СССР N 1413590, G 04 C 11/02, опубл.30.07.88.
8. Журавлев В. И. Поиск и синхронизация в широкополосных системах. М., Радио и связь, 1986.
9. Цифровые радионавигационные устройства / В.В.Барашенков, А.Е.Лутченко, Е.М. Скороходов и др. Под ред. В.Б.Смолова. - М., Сов. радио, 1980.
10. Сетевые спутниковые радионавигационные системы / В.С.Шебшаевич, П.П. Дмитриев, Н.В.Иванцевич и др. Под ред. B.C. Шебшаевича. - М., Радио и связь, 1993.
11. Бортовые устройства спутниковой радионавигации / И.В.Кудрявцев, И.Н. Мищенко, А.И.Волынкин и др. Под ред. В.С.Шебшаевича. - М., Транспорт, 1988.
12. Многостанционный доступ в спутниковых системах связи. М., Связь, 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ синхронизации шкал времени в сети радиосвязи | 2022 |
|
RU2792720C1 |
| СПОСОБ И СИСТЕМА СИНХРОНИЗАЦИИ ШКАЛ ВРЕМЕНИ РАЗНЕСЕННЫХ В ПРОСТРАНСТВЕ РАДИОЭЛЕКТРОННЫХ СРЕДСТВ | 2024 |
|
RU2830997C1 |
| СПОСОБ РАДИОНАВИГАЦИОННЫХ ИЗМЕРЕНИЙ В ИМПУЛЬСНО-ФАЗОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЕ | 1997 |
|
RU2115937C1 |
| СИСТЕМА СИНХРОНИЗАЦИИ | 2017 |
|
RU2649852C1 |
| СИСТЕМА СИНХРОНИЗАЦИИ ПРОСТРАНСТВЕННО РАЗНЕСЕННЫХ ОБЪЕКТОВ | 2017 |
|
RU2647650C1 |
| СИСТЕМА ФОРМИРОВАНИЯ ВРЕМЕННЫХ ПОПРАВОК ПО СИГНАЛАМ СПУТНИКОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ К ШКАЛАМ ВРЕМЕНИ ПРОСТРАНСТВЕННО РАЗНЕСЕННЫХ ПУНКТОВ | 1997 |
|
RU2133489C1 |
| СПОСОБ РАСПРЕДЕЛЕНИЯ СИГНАЛОВ ТОЧНОГО ЕДИНОГО ВРЕМЕНИ (ТЕВ) ПО ТЕЛЕКОММУНИКАЦИОННОЙ СЕТИ И СИСТЕМА РАСПРЕДЕЛЕНИЯ СИГНАЛОВ ТОЧНОГО ЕДИНОГО ВРЕМЕНИ | 2008 |
|
RU2381538C1 |
| ИНТЕГРИРОВАННЫЙ ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1999 |
|
RU2146378C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛЯРИЗАЦИОННЫХ ХАРАКТЕРИСТИК СРЕДЫ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2482509C1 |
| СПОСОБ И СИСТЕМА РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ И ПОЗИЦИОНИРОВАНИЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2012 |
|
RU2499714C2 |
Изобретение относится к области радиотехники и может быть использовано при реализации систем синхронизации шкал времени пространственно разнесенных объектов с неопределенным местоположением относительно эталонной станции. Способ основан на приеме на синхронизируемом объекте меток времени эталонной станции, излучении сигнала запроса и приеме переизлученного эталонной станцией сигнала запроса. Отличие способа состоит в том, что сигнал запроса формируется с характерной для данного объекта кодовой модуляцией частоты и/или фазы, и/или времени формирования (задержки) широкополосного сигнала. На эталонной станции сигнал запроса переизлучается с задержкой, априорно известной на синхронизируемом объекте. Это позволяет осуществлять синхронизацию нескольких объектов без выделения каждому объекту соответствующего временного окна. 1 ил.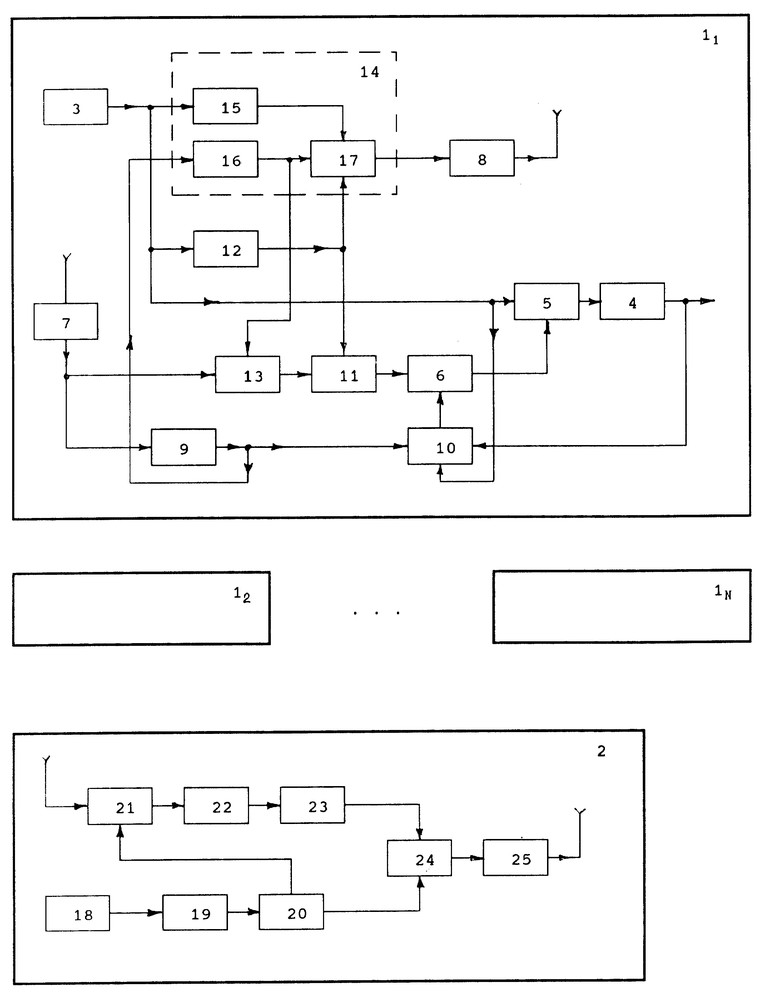
Способ синхронизации шкал времени, заключающийся в том, что формируют на эталонной станции и синхронизируемом объекте собственные временные шкалы в соответствии с сигналами местных опорных генераторов, на эталонной станции излучают в соответствии со своей временной шкалой сигналы синхронизирующих меток времени, на синхронизируемом объекте принимают сигналы синхронизирующих времени и измеряют интервалы времени τ1 между метками времени собственной шкалы времени синхронизируемого объекта и моментами времени приема от эталонной станции сигналов синхронизирующих меток времени, излучают на синхронизируемом объекте сигналы запроса, принимают сигналы запроса на эталонной станции и переизлучают их, принимают переизлученные сигналы запроса на синхронизируемом объекте и измеряют интервалы времени τ2 между излучениями сигналов запроса и их обратным приемом, а по результатам измерений вычисляют поправку для коррекции временной шкалы синхронизируемого объекта, отличающийся тем, что на синхронизируемом объекте формируют сигналы запроса в виде радиосигналов с характерной для данного синхронизируемого объекта кодовой модуляцией частоты, и/или фазы, и/или времени формирования и излучают их в промежутках времени между принимаемыми сигналами синхронизирующих меток времени, на эталонной станции принятые сигналы запроса переизлучают с задержкой на время τ3, априорно известной на синхронизируемом объекте, при этом на синхронизируемом объекте измерение интервалов времени τ2 между излучениями сигналов запроса и их обратным приемом осуществляют путем корреляционных измерений задержек принятых переизлученных сигналов запроса, а коррекцию временной шкалы синхронизируемого объекта производят по результатам измерений каждого из интервалов времени τ1 и τ2, осуществленных после каждого приема сигнала синхронизирующей метки времени, вычислив поправку τи для коррекции временной шкалы по формуле
τи = -[τ1-(τ2-τ3)/2].
| Способ синхронизации шкал времени | 1989 |
|
SU1712942A1 |
| Устройство для привязки шкал времени | 1977 |
|
SU699482A1 |
| Шебшаевич В.С | |||
| и др | |||
| Сетевые спутниковые радионавигационные системы | |||
| - М.: Радио и связь, 1993, с.93 - 95, 188 - 189 | |||
| Прибор для демонстрации изменения поверхностного натяжения жидкости от температуры | 1949 |
|
SU84165A1 |
