Изобретения относятся к радиолокационной технике и могут быть использованы для определения собственных поляризаций среды распространения электромагнитных волн и комплексных коэффициентов передачи волн этих поляризаций, а также к оптической технике - для определения оптических свойств исследуемого образца.
Известен поляризационно-модуляционный эллипсометр (Аззам Р., Башара Н. / Эллипсометрия и поляризованный свет / М.: МИР, 1981, с.301-303), который содержит источник монохроматического света, линейный поляризатор, модулятор поляризации, исследуемую оптическую систему, анализатор и фотодетектор. Принцип работы устройства определяют способом, который включает излучение электромагнитной волны, модулированной по поляризации, прием прошедшей через среду излученной электромагнитной волны и ее анализ.
Недостатком данной группы технических решений является возможность исследования сред только с известными линейными собственными поляризациями.
Наиболее близкими к заявляемым способу и устройству по наибольшему числу существенных признаков являются нуль-эллипсометр повышенной точности и способ его работы (Аззам Р., Башара Н. / Эллипсометрия и поляризованный свет / М.: МИР, 1981, с.458-460), который содержит источник монохроматического света, поляризатор, первый модулятор Фарадея, компенсатор, исследуемую оптическую систему, второй модулятор Фарадея, анализатор и детектор. Принцип работы устройства определяют способом, который включает излучение электромагнитной волны, угол ориентации плоскости поляризации которой монотонно изменяют, прием прошедшей через среду излученной электромагнитной волны, ее модуляцию и анализ.
Основным недостатком известной группы технических решений является возможность исследования сред только с линейными собственными поляризациями.
Основная техническая задача, решаемая заявляемой группой изобретений, состоит в создании способа определения поляризационных характеристик среды и устройства для его реализации с возможностью определения собственных поляризаций любой исследуемой среды, в том числе эллиптических, а также комплексных коэффициентов передачи электромагнитных волн этих поляризаций.
Поставленная задача решается тем, что в способе определения поляризационных характеристик среды, описываемой матрицей пропускания среды S, включающем излучение электромагнитной волны eT(t), угол ориентации θ плоскости поляризации которой монотонно изменяют с угловой скоростью  , прием прошедшей через среду излученной электромагнитной волны
, прием прошедшей через среду излученной электромагнитной волны
eP(t)=S·eT(t)
и ее модуляцию, согласно предложенному решению дополнительно монотонно изменяют угол эллиптичности ε излучаемой электромагнитной волны с угловой скоростью  , причем ω2>>ω1 или ω1>>ω2, угловые скорости ω1 и ω2 изменения угла ориентации θ плоскости поляризации и угла эллиптичности ε соответственно излучаемой волны e0(t) много меньше ее радиальной частоты, закон модуляции принимаемой электромагнитной волны eP(t) описывают выражением:
, причем ω2>>ω1 или ω1>>ω2, угловые скорости ω1 и ω2 изменения угла ориентации θ плоскости поляризации и угла эллиптичности ε соответственно излучаемой волны e0(t) много меньше ее радиальной частоты, закон модуляции принимаемой электромагнитной волны eP(t) описывают выражением:
 ,
,
где PA - оператор, описывающий преобразование угла ориентации плоскости поляризации и угла эллиптичности принимаемой электромагнитной волны, при этом
 ,
,
где
 ,
,  , -
, -
операторы поворота (системы координат описания) на углы θA и εA соответственно;
при этом θA и εA изменяют во времени синхронно с углом ориентации θ плоскости поляризации и углом эллиптичности ε излучаемой электромагнитной волны eT(t) соответственно, при этом θA=θ, а  , далее формируют из модулированной принимаемой электромагнитной волны
, далее формируют из модулированной принимаемой электромагнитной волны  огибающие сигналов S1(t) и S2(t) в соответствии с выражениями:
огибающие сигналов S1(t) и S2(t) в соответствии с выражениями:
 ,
,
 ,
,
и определяют собственные поляризации среды в виде собственных векторов матрицы S, и коэффициенты пропускания волн этих поляризаций в моменты времени t0, когда значение огибающей сигнала S2(t) равно нулю, при этом в моменты времени t0 углы ориентации θc собственных векторов матрицы пропускания среды S равны углам ориентации θ плоскости поляризации излучаемой волны, углы эллиптичности εc собственных векторов матрицы пропускания среды S равны углам эллиптичности ε излучаемой электромагнитной волны, собственные числа λc матрицы пропускания среды S, отвечающие собственным векторам с углами ориентации θc и углами эллиптичности εc, пропорциональны значениям огибающей сигнала S1(t).
Поставленная задача решается также тем, что в устройстве для определения поляризационных характеристик среды, содержащем передающее устройство, включающее источник электромагнитного излучения и первый преобразователь поляризации, и приемное устройство, включающее второй преобразователь поляризации, и детектор, согласно предложенному решению в передающем устройстве дополнительно введен первый блок синхронизации, включающий спутниковый GPS-приемник, генератор высокостабильного колебания и секундных меток, причем вход синхронизации генератора высокостабильного колебания и секундных меток соединен с выходом спутникового GPS-приемника, а первый и второй выходы генератора высокостабильного колебания и секундных меток являются первым и вторым выходами первого блока синхронизации соответственно, источник электромагнитного излучения представляет собой первый синхронизируемый генератор, вход синхронизации которого соединен с первым выходом первого блока синхронизации, первый преобразователь поляризации включает поляризационный разделитель, последовательно соединенные первую и вторую вращающиеся секции круглого волновода со встроенными четвертьволновой и полуволновой фазовыми пластинами соответственно, антенну, первый и второй шаговые двигатели, вращающие первую и вторую вращающиеся секции круглого волновода соответственно, первый и второй датчики угла положения первой и второй вращающихся секций круглого волновода соответственно, контроллер, причем фланец первой вращающейся секции круглого волновода соединен с круглым фланцем поляризационного разделителя, фланец второй вращающейся секции круглого волновода соединен с питающим фидером антенны, выходы первого и второго датчиков угла положения первой и второй вращающихся секций круглого волновода соединены с первым и вторым портами контроллера соответственно, управляющие входы первого и второго шаговых двигателей соединены с третьим и четвертым портами контроллера соответственно, фидеры первого и второго плеча поляризационного разделителя являются первым и вторым портами первого преобразователя поляризации соответственно, пятый и шестой порты контроллера являются третьим и четвертым портами первого преобразователя поляризации соответственно, выходы первого и второго датчиков угла положения первой и второй вращающихся секций круглого волновода являются пятым и шестым портами первого преобразователя поляризации соответственно, причем первый порт первого преобразователя поляризации соединен с выходом первого синхронизируемого генератора, второй порт первого преобразователя поляризации закорочен, третий порт первого преобразователя поляризации соединен с первым выходом первого блока синхронизации, четвертый порт первого преобразователя поляризации соединен со вторым выходом первого блока синхронизации, в приемном устройстве дополнительно введен второй блок синхронизации, идентичный первому блоку синхронизации, второй преобразователь поляризации идентичен первому преобразователю поляризации, детектор включает первый и второй преобразователи частоты, второй синхронизируемый генератор, первый и второй аналого-цифровые преобразователи, делитель частоты, цифровой генератор, первый и второй цифровые формирователи квадратурных компонент, процессор, причем сигнальные входы первого и второго преобразователей частоты соединены с первым и вторым портами второго преобразователя поляризации соответственно, опорные входы первого и второго преобразователей частоты и вход делителя частоты соединены с выходом второго синхронизируемого генератора, сигнальные входы первого и второго аналого-цифровых преобразователей соединены с выходами первого и второго преобразователей частоты соответственно, тактовые входы первого и второго аналого-цифровых преобразователей и вход цифрового генератора соединены с выходом делителя частоты, сигнальные входы первого и второго цифровых формирователей квадратурных компонент соединены с выходами первого и второго аналого-цифровых преобразователей соответственно, первый и второй опорные входы цифровых формирователей квадратурных компонент соединены с первым и вторым выходами цифрового генератора соответственно, первый и второй выходы первого цифрового формирователя квадратурных компонент соединены с первым и вторым портами процессора соответственно, первый и второй выходы второго цифрового формирователя квадратурных компонент соединены с третьим и четвертым портами процессора соответственно, первый выход второго блока синхронизации соединен с входом синхронизации второго синхронизируемого генератора и третьим портом второго преобразователя поляризации, второй выход второго блока синхронизации соединен с четвертым портом второго преобразователя поляризации, пятый и шестой порты процессора соединены с пятым и шестым портами преобразователя поляризации соответственно.
Заявленные изобретения взаимосвязаны настолько, что образуют единый изобретательский замысел, следовательно, данная группа изобретений удовлетворяет требованию единства изобретений.
Изобретение поясняется рисунком, где представлена функциональная схема предлагаемого устройства.
Устройство для определения поляризационных характеристик среды содержит передающее устройство 1 и приемное устройство 2. Передающее устройство 1 включает первый блок синхронизации 3, состоящий из спутникового GPS-приемника 4 и генератора высокостабильного колебания и секундных меток 5, источник электромагнитного излучения, который представлен в виде первого синхронизируемого генератора 6, и первый преобразователь поляризации 7. Вход синхронизации генератора высокостабильного колебания и секундных меток 5 соединен с выходом спутникового GPS-приемника 4, а первый и второй выходы генератора высокостабильного колебания и секундных меток 5 являются первым и вторым выходами первого блока синхронизации 3 соответственно. Вход синхронизации синхронизируемого генератора 6 соединен с первым выходом первого блока синхронизации 3. Первый преобразователь поляризации 7 включает поляризационный разделитель 8, последовательно соединенные первую и вторую вращающиеся секции 9 и 10 круглого волновода со встроенными четвертьволновой и полуволновой фазовыми пластинами соответственно, антенну 11, первый и второй шаговые двигатели 12, вращающие первую и вторую вращающиеся секции 9 и 10 круглого волновода соответственно, первый и второй датчики угла положения 13 первой и второй вращающихся секций 9 и 10 круглого волновода соответственно, контроллер 14. Фланец первой вращающейся секции 9 круглого волновода соединен с круглым фланцем поляризационного разделителя 8, фланец второй вращающейся секции 10 круглого волновода соединен с питающим фидером антенны 11, выходы первого и второго датчиков угла положения 13 первой и второй вращающихся секций 9 и 10 круглого волновода соответственно соединены с первым и вторым портами контроллера 14 соответственно, управляющие входы первого и второго шаговых двигателей 12 соединены с третьим и четвертым портами контроллера 14 соответственно, фидеры первого и второго плеча поляризационного разделителя 8 являются первым и вторым портами первого преобразователя поляризации 7 соответственно, пятый и шестой порты контроллера 14 являются третьим и четвертым портами первого преобразователя поляризации 7 соответственно, выходы первого и второго датчиков угла положения 13 первой и второй вращающихся секций 9 и 10 круглого волновода являются пятым и шестым портами первого преобразователя поляризации 7. Первый порт первого преобразователя поляризации 7 соединен с выходом первого синхронизируемого генератора 6, второй порт первого преобразователя поляризации 7 закорочен, третий порт первого преобразователя поляризации 7 соединен с первым выходом первого блока синхронизации 3, четвертый порт первого преобразователя поляризации 7 соединен со вторым выходом первого блока синхронизации 3. Приемное устройство 2 содержит второй блок синхронизации 3, идентичный первому блоку синхронизации 3, второй преобразователь поляризации 7 и детектор 15. Второй преобразователь поляризации 7 идентичен первому преобразователю поляризации 7. Детектор 15 включает первый и второй преобразователи частоты 16, второй синхронизируемый генератор 6, первый и второй аналого-цифровые преобразователи 17, делитель частоты 18, цифровой генератор 19, первый и второй цифровые формирователи квадратурных компонент 20, процессор 21. Сигнальные входы первого и второго преобразователей частоты 16 соединены с первым и вторым портами второго преобразователя поляризации 7 соответственно, опорные входы первого и второго преобразователей частоты 16 и вход делителя частоты 18 соединены с выходом второго синхронизируемого генератора 6. Сигнальные входы первого и второго аналого-цифровых преобразователей 17 соединены с выходами первого и второго преобразователей частоты 16 соответственно, тактовые входы первого и второго аналого-цифровых преобразователей 17 и вход цифрового генератора 19 соединены с выходом делителя частоты 18. Сигнальные входы первого и второго цифровых формирователей квадратурных компонент 20 соединены с выходами первого и второго аналого-цифровых преобразователей 17 соответственно, первый и второй опорные входы цифровых формирователей квадратурных компонент 20 соединены с первым и вторым выходами цифрового генератора 19 соответственно, первый и второй выходы первого цифрового формирователя квадратурных компонент 20 соединены с первым и вторым портами процессора 21 соответственно, первый и второй выходы второго цифрового формирователя квадратурных компонент 20 соединены с третьим и четвертым портами процессора 21 соответственно, первый выход второго блока синхронизации 3 соединен с входом синхронизации второго синхронизируемого генератора 6 и третьим портом второго преобразователя поляризации 7, второй выход второго блока синхронизации 3 соединен с четвертым портом второго преобразователя поляризации 7, пятый и шестой порты процессора 21 соединены с пятым и шестым портами преобразователя поляризации 7 соответственно.
Генератор высокостабильного колебания и секундных меток 5 выполнен подобно известным серийно выпускаемым приборам, например рубидиевому стандарту частоты FS725 Stanford Research Systems (http://www.thinksrs.com/products/FS725.htm).
Первый и второй синхронизируемые генераторы 6 выполнены по схеме генератора с фазовой автоподстройкой частоты (Манассевич В. Синтезаторы частот / Теория и проектирование: Пер. с англ. / Под ред. А.С.Галина. М.: Связь, 1979. - 384 с., рис.1.15).
Первая и вторая вращающиеся секции 9 и 10 круглого волновода представляют собой отрезки круглого волновода, внутри которых расположены жестко зафиксированные четвертьволновая и полуволновая фазовые пластины, соответственно. Фланцы отрезков круглого волновода соединены с вращающимися сочленениями. Вращение первой и второй вращающихся секций 9 и 10 круглого волновода обеспечивают первый и второй шаговые двигатели 12, например, через зубчатую передачу.
Первый и второй датчики угла положения 13 первой и второй вращающихся секций 9 и 10 круглого волновода реализованы подобно серийно выпускаемым энкодерам, например подобно энкодеру Е100Н35 Autonics Corporation (http://www.autonics.com/products/products_detail.php?catecode=01/06/01&db_uid =64).
Антенна 11 выполнена в виде круглого рупора.
Цифровой генератор 19 совместно с первым и вторым цифровыми формирователями квадратурных компонент 20 реализованы на основе AD6636 Analog Devices (http://www.analog.com/static/imported-files/data_sheets/AD6636.pdf).
Для корректной работы заявляемого устройства необходимо, чтобы ориентация плеч поляризационного разделителя 8 первого преобразователя поляризации 7 была идентична ориентации плеч поляризационного разделителя 8 второго преобразователя поляризации 7. Например, в случае исследования протяженной среды распространения ориентирование поляризационных разделителей 8 проводят по отвесу относительно земной поверхности.
Нулевым значениям первого и второго датчиков положения 13 первой и второй вращающихся секций 9 и 10 круглого волновода первого и второго преобразователей поляризации 7 соответствуют вертикальные положения полуволновой и четвертьволновой фазовых пластин. Контроллеры 14 первого и второго преобразователей поляризации 7 тактируют высокостабильным сигналом с первого выхода первого и второго блоков синхронизации 3 соответственно.
Устройство работает следующим образом. Контроллер 14 первого преобразователя поляризации 7 на третьем и четвертом портах вырабатывает управляющие сигналы для первого и второго шаговых двигателей 12 таким образом, чтобы моменту прихода секундной метки с первого выхода первого блока синхронизации 3 соответствовала вертикальная ориентация полуволновой и четвертьволновой фазовых пластин первого преобразователя поляризации 7. Контроллер 14 второго преобразователя поляризации 7 на третьем и четвертом портах вырабатывает управляющие сигналы для первого и второго шаговых двигателей 12 таким образом, чтобы в момент прихода секундной метки с первого выхода второго блока синхронизации 3 ориентация полуволновой фазовой пластины второго преобразователя поляризации 7 была вертикальной, а четвертьволновой фазовой пластины второго преобразователя поляризации 7 - горизонтальной. При этом установку нужного углового положения полуволновой и четвертьволновой фазовых пластин первого и второго преобразователей поляризации 7 производят путем изменения скорости вращения первой и второй вращающихся секций 9 и 10 круглого волновода.
В установившемся режиме, когда нужные положения полуволновой и четвертьволновой фазовых пластин первого и второго преобразователей поляризации 7 достигнуты, первый и второй шаговые двигатели 12 первого и второго преобразователей поляризации 7 вращают первую и вторую вращающиеся секции 9 и 10 круглого волновода первого и второго преобразователей поляризации 7 в одном направлении и с угловыми скоростями ω1 и ω2 соответственно, причем ω2>>ω1 или ω1>>ω2. В передающем устройстве 1 генератор высокостабильного колебания и секундных меток 5, синхронизируемый секундными метками спутникового GPS-приемника 4, генерирует опорный сигнал SOП(t), например, с частотой fОП=10 МГц. Синхронизируемый опорным сигналом SОП(t) первый синхронизируемый генератор 6 (например, петлей фазовой автоподстройки частоты) формирует колебания S0(t):

где
е - основание натурального логарифма;
j - мнимая единица;
ω0 - радиальная частота колебаний S0(t);
t - время.
Колебания S0(t) поступают в питающий фидер поляризационного разделителя 8 первого преобразователя поляризации 7. Поле электромагнитной волны e0(t), формируемое в поляризационном разделителе 8 первого преобразователей поляризации 7, модулируют при ее прохождении первой и второй вращающихся секций 9 и 10 круглого волновода первого преобразователя поляризации 7. При этом антенной 11 в пространство излучают электромагнитное поле, описываемое вектором eT(t):

где
 ;
;
PT - оператор, описывающий преобразование угла ориентации плоскости поляризации и угла эллиптичности поля электромагнитной волны e0(t);
L1 - оператор полуволновой фазовой пластины первого преобразователя поляризации 7 в собственном базисе описания;
L2 - оператор четвертьволновой фазовой пластины первого преобразователя поляризации 7 в собственном базисе описания;
R(θA), R(ε) - операторы поворота;
θ и ε - углы поворота полуволновой и четвертьволновой фазовых пластин соответственно первого преобразователя поляризации 7;
«~» - знак транспонирования.
Антенна 11 второго преобразователя поляризации 7 принимает волну, которую описывают вектором:

где S - матрица пропускания среды:

S0 - матрица пропускания среды в собственном поляризационном базисе;
F - оператор группы вращений, описывающий переход из собственного базиса среды распространения, в общем случае эллиптического, в линейный ортогональный измерительный базис. Оператор F образован двумя собственными векторами eC1 и eC2 с углами ориентации θC1, θC2 и углами эллиптичности εC1, εC2 соответственно:

Принимаемую электромагнитную волну eP(t) модулируют при ее прохождении первой и второй вращающихся секций 9 и 10 круглого волновода второго преобразователя поляризации 7 по закону:

где
 ;
;
PA - оператор, описывающий преобразование угла ориентации плоскости поляризации и угла эллиптичности принимаемой электромагнитной волны;
R(θA), R(εA) - операторы поворота;
θA и εA - углы поворота полуволновой и четвертьволновой фазовых пластин соответственно второго преобразователя поляризации 7, при этом θA=θ и  ;
;
L1 - оператор полуволновой фазовой пластины второго преобразователя поляризации 7 в собственном базисе описания;
L2 - оператор четвертьволновой фазовой пластины второго преобразователя поляризации 7 в собственном базисе описания;
«~» - знак транспонирования;
 и
и  - комплексные сигналы модулированной принимаемой электромагнитной волны
- комплексные сигналы модулированной принимаемой электромагнитной волны  ;
;
 и
и  - комплексные огибающие сигналов
- комплексные огибающие сигналов  и
и  соответственно.
соответственно.
Модулированная принимаемая электромагнитная волна  поступает на поляризационный разделитель 8 второго преобразователя поляризации 7. На выходах первого и второго плеч поляризационного разделителя 8 второго преобразователя поляризации 7 формируют два комплексных сигнала
поступает на поляризационный разделитель 8 второго преобразователя поляризации 7. На выходах первого и второго плеч поляризационного разделителя 8 второго преобразователя поляризации 7 формируют два комплексных сигнала  и
и  соответственно, которые поступают на вход первого и второго преобразователей частоты 16, опорным сигналом для которых служат колебания
соответственно, которые поступают на вход первого и второго преобразователей частоты 16, опорным сигналом для которых служат колебания  второго синхронизируемого генератора 6:
второго синхронизируемого генератора 6:

где ωПЧ - промежуточная частота.
Выходные сигналы  и
и  с первого и второго преобразователей частоты 16 соответственно описывают выражениями:
с первого и второго преобразователей частоты 16 соответственно описывают выражениями:


Сигналы  и
и  поступают на первый и второй аналого-цифровые преобразователи 17 соответственно. Затем в первом и втором цифровых формирователях квадратурных компонент 20 формируют цифровые коды квадратурных компонент Q1, I1 и Q2, I2 комплексных огибающих
поступают на первый и второй аналого-цифровые преобразователи 17 соответственно. Затем в первом и втором цифровых формирователях квадратурных компонент 20 формируют цифровые коды квадратурных компонент Q1, I1 и Q2, I2 комплексных огибающих  и
и  сигналов
сигналов  и
и  соответственно, которые поступают на процессор 21, в котором на программном уровне реализуют определение поляризационных характеристик среды - собственных поляризаций и коэффициентов пропускания волн этих поляризаций: в момент времени, когда
соответственно, которые поступают на процессор 21, в котором на программном уровне реализуют определение поляризационных характеристик среды - собственных поляризаций и коэффициентов пропускания волн этих поляризаций: в момент времени, когда  , за угол ориентации θC собственного вектора матрицы пропускания среды S принимают половинное значение первого датчика угла положения 13 первой вращающейся секции 9 круглого волновода второго преобразователя поляризации 7, за угол эллиптичности εC собственного вектора матрицы пропускания среды S принимают значение второго датчика угла положения 13 второй вращающейся секции 10 круглого волновода второго преобразователя поляризации 7, а реальная и мнимая части собственного числа λC матрицы пропускания среды S, отвечающего собственному вектору с параметрами θC и εC, пропорциональны значениям Q1, I1 соответственно, причем собственные поляризации среды, в общем случае две, измеряют в диапазоне углов эллиптичности ε принимаемой электромагнитной волны
, за угол ориентации θC собственного вектора матрицы пропускания среды S принимают половинное значение первого датчика угла положения 13 первой вращающейся секции 9 круглого волновода второго преобразователя поляризации 7, за угол эллиптичности εC собственного вектора матрицы пропускания среды S принимают значение второго датчика угла положения 13 второй вращающейся секции 10 круглого волновода второго преобразователя поляризации 7, а реальная и мнимая части собственного числа λC матрицы пропускания среды S, отвечающего собственному вектору с параметрами θC и εC, пропорциональны значениям Q1, I1 соответственно, причем собственные поляризации среды, в общем случае две, измеряют в диапазоне углов эллиптичности ε принимаемой электромагнитной волны  от
от  до
до  , углов ориентации θ плоскости поляризации принимаемой электромагнитной волны
, углов ориентации θ плоскости поляризации принимаемой электромагнитной волны  от
от  до
до  и определяют углами ориентации θС1, θС2 углами эллиптичности εC1, εC2 собственных векторов ее матрицы пропускания S, которые в совокупности со значениями собственных чисел
и определяют углами ориентации θС1, θС2 углами эллиптичности εC1, εC2 собственных векторов ее матрицы пропускания S, которые в совокупности со значениями собственных чисел  ,
,  , отвечающим этим векторам, определяют поляризационные параметры среды.
, отвечающим этим векторам, определяют поляризационные параметры среды.
Группа изобретений относится к радиолокационной технике и может быть использована для определения собственных поляризаций среды распространения электромагнитных волн и комплексных коэффициентов передачи волн этих поляризаций. В способе излучают электромагнитную волну, угол ориентации плоскости поляризации и угол эллиптичности которой монотонно изменяют, принимают прошедшую через среду излученную электромагнитную волну и ее модулируют. Далее формируют из модулированной принимаемой электромагнитной волны огибающие сигналов и определяют собственные поляризации среды. Устройство содержит передающее устройство 1 и приемное устройство 2. Передающее устройство 1 включает первый блок синхронизации 3, состоящий из спутникового GPS-приемника 4 и генератора высокостабильного колебания и секундных меток 5, первый синхронизируемый генератор 6 и первый преобразователь поляризации 7, который включает поляризационный разделитель 8, первую и вторую вращающиеся секции 9 и 10 круглого волновода, антенну 11, первый и второй шаговые двигатели 12, первый и второй датчики угла положения 13, контроллер 14. Приемное устройство 2 содержит второй блок синхронизации 3, второй преобразователь поляризации 7 и детектор 15. Детектор 15 включает первый и второй преобразователи частоты 16, второй синхронизируемый генератор 6, первый и второй аналого-цифровые преобразователи 17, делитель частоты 18, цифровой генератор 19, первый и второй цифровые формирователи квадратурных компонент 20, процессор 21. Технический результат заключается в расширении функциональных возможностей исследования сред распространения электромагнитных сигналов. 2 н.п. ф-лы, 1 ил.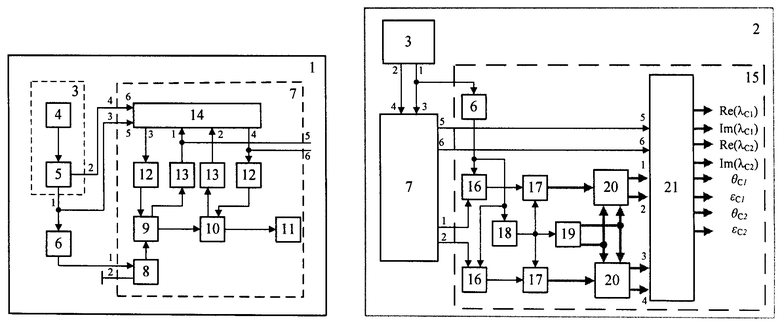
1. Способ определения поляризационных характеристик среды, описываемой матрицей пропускания среды S, включающий излучение электромагнитной волны еT(t), угол ориентации θ плоскости поляризации которой монотонно изменяют с угловой скоростью  , прием прошедшей через среду излученной электромагнитной волны eP(t)=S·eT(t) и ее модуляцию, отличающийся тем, что дополнительно монотонно изменяют угол эллиптичности ε излучаемой электромагнитной волны с угловой скоростью
, прием прошедшей через среду излученной электромагнитной волны eP(t)=S·eT(t) и ее модуляцию, отличающийся тем, что дополнительно монотонно изменяют угол эллиптичности ε излучаемой электромагнитной волны с угловой скоростью  , причем ω2>>ω1 или ω1>>ω2, угловые скорости ω1 и ω2 изменения угла ориентации θ плоскости поляризации и угла эллиптичности ε, соответственно, излучаемой волны е0(t) много меньше ее радиальной частоты, закон модуляции принимаемой электромагнитной волны eP(t) описывают выражением
, причем ω2>>ω1 или ω1>>ω2, угловые скорости ω1 и ω2 изменения угла ориентации θ плоскости поляризации и угла эллиптичности ε, соответственно, излучаемой волны е0(t) много меньше ее радиальной частоты, закон модуляции принимаемой электромагнитной волны eP(t) описывают выражением
 ,
,
где PA - оператор, описывающий преобразование угла ориентации плоскости поляризации и угла эллиптичности принимаемой электромагнитной волны, при этом  ,
,
где
 ,
,
при этом θА и εA изменяют во времени синхронно с углом ориентации θ плоскости поляризации и углом эллиптичности ε излучаемой электромагнитной волны eT(t) соответственно, при этом θA=θ, а  , далее формируют из модулированной принимаемой электромагнитной волны
, далее формируют из модулированной принимаемой электромагнитной волны  огибающие сигналов S1(t) и S2(t) в соответствии с выражениями
огибающие сигналов S1(t) и S2(t) в соответствии с выражениями  ,
,  и определяют собственные поляризации среды в виде собственных векторов матрицы S и коэффициенты пропускания волн этих поляризаций в моменты времени t0, когда значение огибающей сигнала S2(t) равно нулю, при этом в моменты времени t0 углы ориентации θC собственных векторов матрицы пропускания среды S равны углам ориентации θ плоскости поляризации излучаемой волны, углы эллиптичности εC собственных векторов матрицы пропускания среды S равны углам эллиптичности ε излучаемой электромагнитной волны, собственные числа λC матрицы пропускания среды S, отвечающие собственным векторам с углами ориентации θC и углами эллиптичности εC, пропорциональны значениям огибающей сигнала S1(t).
и определяют собственные поляризации среды в виде собственных векторов матрицы S и коэффициенты пропускания волн этих поляризаций в моменты времени t0, когда значение огибающей сигнала S2(t) равно нулю, при этом в моменты времени t0 углы ориентации θC собственных векторов матрицы пропускания среды S равны углам ориентации θ плоскости поляризации излучаемой волны, углы эллиптичности εC собственных векторов матрицы пропускания среды S равны углам эллиптичности ε излучаемой электромагнитной волны, собственные числа λC матрицы пропускания среды S, отвечающие собственным векторам с углами ориентации θC и углами эллиптичности εC, пропорциональны значениям огибающей сигнала S1(t).
2. Устройство для определения поляризационных характеристик среды, содержащее передающее устройство, включающее источник электромагнитного излучения и первый преобразователь поляризации, и приемное устройство, включающее второй преобразователь поляризации, и детектор, отличающееся тем, что в передающем устройстве дополнительно введен первый блок синхронизации, включающий спутниковый GPS-приемник, генератор высокостабильного колебания и секундных меток, причем вход синхронизации генератора высокостабильного колебания и секундных меток соединен с выходом спутникового GPS-приемника, а первый и второй выходы генератора высокостабильного колебания и секундных меток являются первым и вторым выходами первого блока синхронизации соответственно, источник электромагнитного излучения представляет собой первый синхронизируемый генератор, вход синхронизации которого соединен с первым выходом первого блока синхронизации, первый преобразователь поляризации включает поляризационный разделитель, последовательно соединенные первую и вторую вращающиеся секции круглого волновода со встроенными четвертьволновой и полуволновой фазовыми пластинами соответственно, антенну, первый и второй шаговые двигатели, вращающие первую и вторую вращающиеся секции круглого волновода соответственно, первый и второй датчики угла положения первой и второй вращающихся секций круглого волновода соответственно, контроллер, причем фланец первой вращающейся секции круглого волновода соединен с круглым фланцем поляризационного разделителя, фланец второй вращающейся секции круглого волновода соединен с питающим фидером антенны, выходы первого и второго датчиков угла положения первой и второй вращающихся секций круглого волновода соединены с первым и вторым портами контроллера соответственно, управляющие входы первого и второго шаговых двигателей соединены с третьим и четвертым портами контроллера соответственно, фидеры первого и второго плечей поляризационного разделителя являются первым и вторым портами первого преобразователя поляризации соответственно, пятый и шестой порты контроллера являются третьим и четвертым портами первого преобразователя поляризации соответственно, выходы первого и второго датчиков угла положения первой и второй вращающихся секций круглого волновода являются пятым и шестым портами первого преобразователя поляризации соответственно, причем первый порт первого преобразователя поляризации соединен с выходом первого синхронизируемого генератора, второй порт первого преобразователя поляризации закорочен, третий порт первого преобразователя поляризации соединен с первым выходом первого блока синхронизации, четвертый порт первого преобразователя поляризации соединен с вторым выходом первого блока синхронизации, в приемном устройстве дополнительно введен второй блок синхронизации, идентичный первому блоку синхронизации, второй преобразователь поляризации идентичен первому преобразователю поляризации, детектор включает первый и второй преобразователи частоты, второй синхронизируемый генератор, первый и второй аналого-цифровые преобразователи, делитель частоты, цифровой генератор, первый и второй цифровые формирователи квадратурных компонент, процессор, причем сигнальные входы первого и второго преобразователей частоты соединены с первым и вторым портами второго преобразователя поляризации соответственно, опорные входы первого и второго преобразователей частоты и вход делителя частоты соединены с выходом второго синхронизируемого генератора, сигнальные входы первого и второго аналого-цифровых преобразователей соединены с выходами первого и второго преобразователей частоты соответственно, тактовые входы первого и второго аналого-цифровых преобразователей и вход цифрового генератора соединены с выходом делителя частоты, сигнальные входы первого и второго цифровых формирователей квадратурных компонент соединены с выходами первого и второго аналогово-цифровых преобразователей соответственно, первый и второй опорные входы цифровых формирователей квадратурных компонент соединены с первым и вторым выходами цифрового генератора соответственно, первый и второй выходы первого цифрового формирователя квадратурных компонент соединены с первым и вторым портами процессора соответственно, первый и второй выходы второго цифрового формирователя квадратурных компонент соединены с третьим и четвертым портами процессора соответственно, первый выход второго блока синхронизации соединен с входом синхронизации второго синхронизируемого генератора и третьим портом второго преобразователя поляризации, второй выход второго блока синхронизации соединен с четвертым портом второго преобразователя поляризации, пятый и шестой порты процессора соединены с пятым и шестым портами преобразователя поляризации, соответственно.
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПОЛЯРИЗАЦИОННЫХ ПАРАМЕТРОВ ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ | 2009 |
|
RU2422783C2 |
| Способ определения степени поляризации и направления преимущественной поляризации оптического излучения | 1979 |
|
SU743366A1 |
| RU 93047478 C1, 10.03.1996 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛЯРИЗАЦИОННЫХ ХАРАКТЕРИСТИК ЭЛЕКТРОМАГНИТНОГО ПОЛЯ | 1993 |
|
RU2084909C1 |

