Изобретение относится к бортовому радиоэлектронному оборудованию и предназначено для управления подготовкой и применением всех типов оружия, используемого на самолете.
Известна система управления оружием, содержащая панель управления, находящуюся в кабине самолета, логический блок, расположенный в фюзеляже, и приборы управления стрельбой, расположенные под крыльями (патент N 3598015, США).
Недостатком такой системы является невозможность наращивания количества точек подвески и типов оружия без существенной доработки аппаратуры, а также большое количество проводных линий связи.
Известна также система управления оружием, содержащая командный блок, расположенный в кабине самолета, и дистанционные блоки, расположенные в местах подвески оружия. Командный блок состоит из узла временных интервалов, узла разовых команд, узла управления встроенной пушечной установкой (ВПУ) и узла управления неуправляемым оружием (НУО), а дистанционный блок (аналогичный для всех точек подвески) состоит из узла коммутации и узла преобразования сигналов (патент N 3803974, США).
Это устройство как наиболее близкое по технической сущности и достигаемому результату принято за ближайший аналог.
Недостатками этой системы являются ограниченные функциональные возможности, так как система предназначена для управления оружием, не требующим для своей подготовки выработки сложных циклограмм, и не обеспечивает подготовку оружия, требующего формирования импульсов подготовки с последующим запоминанием на время, большее, чем цикл поступления команд на дистанционный блок, в результате чего известная система приспособлена для управления неуправляемым оружием, требующим для своего применения лишь пусковых импульсов; невозможность наращивания количества точек подвески и типов оружия без существенной доработки аппаратуры, а также большое количество проводных линий связи на борту.
Задачей заявляемого изобретения является расширение функциональных возможностей при одновременном сокращении проводных линий связи, снижении веса системы и возможности наращивания количества точек подвески и типов оружия без существенной доработки аппаратуры путем формирования сложных циклограмм подготовки и пуска управляемого и неуправляемого оружия, а также обеспечения возможности оперативного автоматического обмена информацией в двуполярном коде (ДПК).
Для достижения указанного результата в систему управления оружием, содержащую командный блок, состоящий из узла временных интервалов, узла разовых команд, узла управления встроенной пушечной установкой (ВПУ) и узла управления неуправляемым оружием (НУО), и дистанционные блоки, каждый из которых состоит из узла коммутации и узла преобразования сигналов с точек подвески, причем первые вход и выход узла временных интервалов соединены соответственно с первыми выходом и входом узла управления НУО, первый выход узла разовых команд соединен с четвертым входом узла временных интервалов и пятым входом узла управления НУО, третий выход - с первым входом узла управления ВПУ, первый выход и второй вход которого соединен с ВПУ, первый вход узла разовых команд соединен с пятым выходом узла управления НУО, четвертые вход и выход - с панелью индикации, выход узла коммутации и вход узла преобразования сигналов соединены с подвесками, введены: в командный блок - узел управления управляемым оружием (УР), узел связи с БЦВМ и узел связи с дистанционными блоками, а в каждый из дистанционных блоков - узел связи с командным блоком, причем первые вход и выход узла управления УР соединены соответственно с четвертым выходом и пятым входом узла временных интервалов, вторые вход и выход - соответственно со вторыми выходом и входом узла связи с БЦВМ, третьи вход и выход - соответственно со вторыми выходом и входом узла связи с дистанционными блоками, четвертые вход и выход - соответственно с первым выходом и вторым входом узла разовых команд, пятые вход и выход - соответственно со вторыми выходом и входом узла управления НУО, вторые вход и выход узла управления временных интервалов соединены соответственно с третьими выходом и входом узла связи с БЦВМ, третьи вход и выход - соответственно с третьими выходом и входом узла связи с дистанционными блоками, третьи вход и выход узла управления НУО соединены соответственно с первыми выходом и входом узла связи с БЦВМ, четвертые вход и выход - соответственно с первыми выходом и входом узла связи с дистанционными блоками, четвертый выход которого соединен с четвертым входом узла связи с БЦВМ, пятый выход - с третьим входом узла разовых команд, а вход и выход ДПК - с выходом и входом ДПК узла связи с командным блоком, первый вход которого соединен с первым выходом узла преобразования сигналов, а первый выход - с первым входом узла коммутации, второй выход узла управления ВПУ соединен с пятым входом узла связи с БЦВМ, шестой вход которого соединен со вторым выходом узла разовых команд, а входы и выходы ДПК - с БЦВМ.
На чертеже представлена структурная схема системы управления оружием.
Система управления оружием состоит из узла 1 временных интервалов, представляющего собой набор счетчиков, триггеров и микросхем, из которых сформированы формирователи задержек и таймеры; узла 2 управления УР, содержащего микросхемы и ПЗУ с жесткой программой; узла 3 управления НУО, содержащего микросхемы и ПЗУ, обеспечивающие выделение признака оружия, выбор точки и управление пуском; узла 4 разовых команд, содержащего реле, обеспечивающие согласование уровней сигналов, поступающих извне и выдаваемых наружу; узла 5 связи с БЦВМ, представляющего собой набор цифровых и аналоговых микросхем, обеспечивающих обмен в коде ДПК с БЦВМ; узла 6 связи с дистанционными блоками, содержащего цифровые и аналоговые микросхемы; узла 7 связи с командным блоком, содержащего цифровые и аналоговые микросхемы и реле, обеспечивающие работу в коде ДПК и согласование уровней сигналов для обмена информацией с подвеской; узла 8 управления ВПУ, содержащего микросхемы, реле и контакторы; узла 9 коммутации, содержащего реле и контакторы, с которых выдаются команды на подвеску, и узла 10 преобразования сигналов с точек подвески, представляющего собой набор реле и контакторов, преобразующих сигналы с подвески.
Система управления оружием работает следующим образом.
В данном описании рассмотрена работа одной подвески, так как работа остальных аналогична.
С панели управления и индикации на четвертый вход узла 4 разовых команд подается команда включения питания системы. С первого выхода узла 4 преобразованная команда поступает на четвертый вход узла 1 временных интервалов. По этой команде система устанавливается в исходное состояние и в узле 1 формируются временные интервалы, которые с четвертого выхода узла 1 временных интервалов передаются на первый вход узла 2 управления УР, где по ним формируются управляющие сигналы включения питания подвесок, передаваемые с третьего выхода узла 2 на второй вход узла 6 связи с дистанционными блоками, где происходит преобразование этих сигналов в код ДПК и последующая передача их в узел 7 связи с командным блоком. Из узла 7 связи с командным блоком преобразованная информация поступает в узел 9 коммутации, а затем на питающие цепи исполнительных механизмов подвески. С подвески в узел 10 преобразования сигналов поступает информация о наличии и типе груза на подвеске, которая передается в узел 7 связи с командным блоком, а оттуда в коде ДПК - в узел 6 связи с дистанционными блоками.
С панели управления и индикации кабины через узел 4 разовых команд выдается в систему информация о заданном режиме работы и передается с первого выхода узла 4 на четвертый вход узла 1 временных интервалов, на четвертый вход узла 2 управления УР и на пятый вход узла 3 управления НУО.
Из БЦВМ в коде ДПК в узел 5 поступают управляющие сигналы, которые после преобразования поступают на второй вход узла 1, на второй вход узла 2 и на третий вход узла 3. Узлы 1, 2, 3 формируют на основании анализа всех полученных данных управляющие и информационные сигналы и производят выбор режима работы. С третьего выхода узла 2 на второй вход узла 6 поступают сигналы, включающие питающие цепи исполнительных механизмов точек подвески. Эти сигналы преобразуются в узле 6 и передаются в коде ДПК в узел 7 связи с командным блоком и затем после преобразований в узлах 7 и 9 поступают на подвеску.
Информационные сигналы о состоянии точки подвески и загрузки ее поступают с пятого выхода узла 6 на третий вход узла 4 и после преобразования - на панель индикации кабины.
Информация о состоянии точек подвески, загрузке, выбранном режиме работы и исходных данных из БЦВМ и панели управления и индикации кабины поступает на четвертый вход узла 5 с четвертого выхода узла 6, на первый вход узла 5 с третьего выхода узла 3, на второй вход узла 5 со второго выхода узла 2, на третий вход узла 5 со второго выхода узла 1 и на шестой вход узла 5 со второго выхода узла 4. Принятая узлом 5 информация преобразуется и в коде ДПК поступает в БЦВМ.
При нажатии в кабине боевой кнопки (БК) сигнал поступает через узел 4 на четвертый вход узла 1, на четвертый вход узла 2 и на пятый вход узла 3. В зависимости от выбранного режима работы узлы 1, 2 и 3 вырабатывают управляющие сигналы, которыми обмениваются между собой: сигналы с четвертого выхода узла 1 поступают на первый вход узла 2, а с первого выхода узла 2 - на пятый вход узла 1; сигналы с пятого выхода узла 2 поступают на второй вход узла 3, а со второго выхода узла 3 - на пятый вход узла 2; сигналы с первого выхода узла 1 поступают на первый вход узла 3, а с первого выхода узла 3 - на первый вход узла 1, а также управляющие пусковые сигналы, передаваемые на третий вход узла 6 с третьего выхода узла 1, на второй вход узла 6 с третьего выхода узла 2 и на первый вход узла 6 с четвертого выхода узла 3. Преобразованные сигналы в коде ДПК из узла 6 поступают в узел 7 и далее через узел 9 на исполнительные механизмы точки подвески.
Информация о работе с пусковыми цепями точек подвески поступает со второго выхода узла 1, со второго выхода узла 2 и с третьего выхода узла 3 на соответствующие входы узла 5, а оттуда - в БЦВМ, а также с четвертого выхода узла 2 на второй вход узла 4, а оттуда на панель индикации кабины.
С точек подвесок поступают ответные сигналы через узел 10 преобразования сигналов и узел 7 связи с командным блоком в узел 6 связи с дистанционными блоками и после преобразования в узле 6 эти сигналы поступают на третий вход узла 1, на третий вход узла 2 и на четвертый вход узла 3. После анализа полученных данных в узлах 1, 2, 3 принимается решение о последующих действиях системы: продолжение отработки циклограммы пуска, прекращение пуска, переход к следующей точке, формирование сигналов схода-несхода и выдача управляющих сигналов на точки подвески, а также передача информации о состоянии подвесок, выполняемых и выполненных командах системы в БЦВМ с четвертого выхода узла 6 на четвертый вход узла 5 и с пятого выхода узла 6 на третий вход узла 4 и далее на панель индикации.
После отпускания БК и окончания работы с исполнительными механизмами точка подвески обесточивается и система при следующем нажатии БК переходит к работе со следующей выбранной точкой подвески.
С панели управления и индикации через узел 4 управления разовых команд в систему поступает информация о режиме работы ВПУ, которая передается с третьего выхода узла 4 разовых команд на первый вход узла 8 управления ВПУ. При нажатии в кабине гашетки сигнал поступает с третьего выхода узла 4 на первый вход узла 8, где формируются сигналы управления работой ВПУ. С ВПУ на второй вход узла 8 поступают сигналы с датчика патронов, которые далее передаются через узел 5 на БЦВМ для индикации.
Таким образом, введение новых узлов и соответственно связей между ними обеспечивает возможность формирования сложных циклограмм подготовки и пуска как неуправляемого, так и управляемого оружия, оперативного автоматического обмена информацией в двуполярном коде, что позволило расширить функциональные возможности системы, сократить количество проводных линий связи, а значит и снизить вес системы, а также наращивать количество точек подвески и типов оружия без существенной доработки аппаратуры.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ОРУЖИЕМ | 1999 |
|
RU2158024C1 |
| СИСТЕМА УПРАВЛЕНИЯ ОРУЖИЕМ | 2000 |
|
RU2179335C1 |
| СИСТЕМА УПРАВЛЕНИЯ ОРУЖИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2249543C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2170409C1 |
| Система управления оружием летательного аппарата | 2019 |
|
RU2717404C1 |
| СИСТЕМА РЕГИСТРАЦИИ ДАННЫХ | 2000 |
|
RU2173835C1 |
| БЛОК РАСПРЕДЕЛЕНИЯ И ПРЕОБРАЗОВАНИЯ ИНФОРМАЦИИ | 2007 |
|
RU2391256C2 |
| СИСТЕМА УПРАВЛЕНИЯ ОРУЖИЕМ | 2007 |
|
RU2359874C2 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ЛЕГКОГО УЧЕБНО-БОЕВОГО САМОЛЕТА | 2002 |
|
RU2203200C1 |
| СИСТЕМА УПРАВЛЕНИЯ ОРУЖИЕМ | 2009 |
|
RU2410627C1 |
Изобретение относится к бортовому радиоэлектронному оборудованию и предназначено для управления подготовкой и применением всех типов оружия, используемого на самолете. Технический результат заключается в обеспечении возможности формирования сложных циклограмм подготовки и пуска как неуправляемого, так и управляемого оружия, оперативного автоматического обмена информацией в двуполярном коде. Технический результат достигается за счет того, что система состоит из командного блока и дистанционных блоков на каждую точку подвески. Командный блок содержит узел временных интервалов, узел разовых команд, узел управления встроенной пушечной установкой, узел управления неуправляемым оружием, узел управления управляемым оружием, узел связи с БЦВМ и узел связи с дистанционными блоками. Каждый из дистанционных блоков содержит узел коммутации, узел преобразования сигналов и узел связи с командным блоком. Изобретение позволило расширить функциональные возможности системы, сократить количество проводных линий связи, а значит, и снизить вес системы, а также наращивать количество точек подвески и типов оружия без существенной доработки аппаратуры. 1 ил.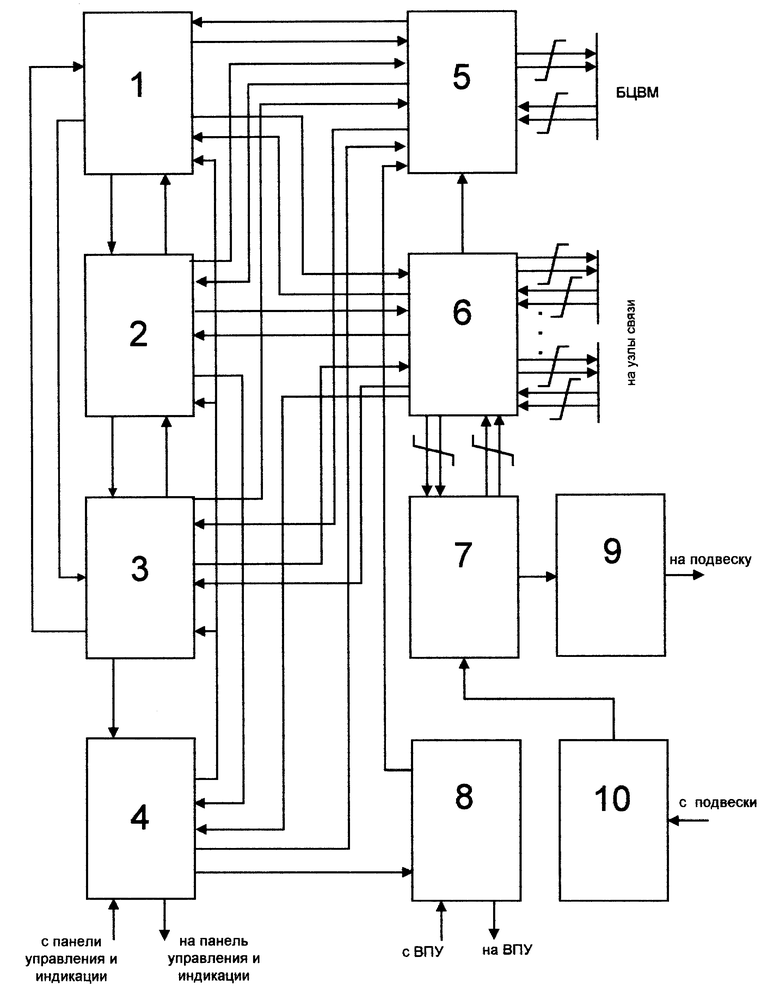
Система управления оружием, содержащая командный блок, состоящий из узла временных интервалов, узла разовых команд, узла управления встроенной пушечной установкой (ВПУ) и узла управления неуправляемым оружием (НУО), и дистанционные блоки, каждый из которых состоит из узла коммутации и узла преобразования сигналов с точек подвески, причем первые вход и выход узла временных интервалов соединены соответственно с первыми выходом и входом узла управления НУО, первый выход узла разовых команд соединен с четвертым входом узла временных интервалов и пятым входом узла управления НУО, третий выход - с первым входом узла управления ВПУ, первый выход и второй вход которого соединены с ВПУ, первый вход узла разовых команд соединен с пятым выходом узла управления НУО, четвертые вход и выход - с панелью индикации, выход узла коммутации и выход узла преобразования сигналов соединены с подвесками, отличающаяся тем, что в командный блок введены узел управления управляемым оружием (УР), узел связи с БЦВМ и узел связи с дистанционными блоками, а в каждый из дистанционных блоков - узел связи с командным блоком, причем первые вход и выход узла управления УР соединены соответственно с четвертым выходом и пятым входом узла временных интервалов, вторые вход и выход - соответственно со вторыми выходом и входом узла связи с БЦВМ, третьи вход и выход - соответственно со вторыми выходом и входом узла связи с дистанционными блоками, четвертые вход и выход - соответственно с первым выходом и вторым входом узла разовых команд, пятые вход и выход - соответственно со вторыми выходом и входом узла управления НУО, вторые вход и выход узла управления временных интервалов соединены соответственно с третьими выходом и входом узла связи с БЦВМ, третьи вход и выход - соответственно с третьими выходом и входом узла связи с дистанционными блоками, третьи вход и выход узла управления НУО соединены соответственно с первыми выходом и входом узла связи с БЦВМ, четвертые вход и выход - соответственно с первыми выходом и входом узла связи с дистанционными блоками, четвертый выход которого соединен с четвертым входом узла связи с БЦВМ, пятый выход - с третьим входом узла разовых команд, а вход и выход двуполярного кода (ДПК) - с выходом и входом ДПК узла связи с командным блоком, первый вход которого соединен с первым выходом узла преобразования сигналов, а первый выход - с первым входом узла коммутации, второй выход узла управления ВПУ соединен с пятым входом узла связи с БЦВМ, шестой вход которого соединен со вторым выходом узла разовых команд, а вход и выход ДПК - с БЦВМ.
| US 3803974 A, 16.04.1974 | |||
| US 3598015 A, 02.04.1969 | |||
| US 3942409 A, 09.05.1976 | |||
| US 4307650 A, 29.12.1981 | |||
| RU 94013567 A1, 27.02.1996 | |||
| ИЗМЕРИТЕЛЬ ПАРАМЕТРОВ СОСТОЯНИЯ ОБЪЕКТОВ УПРАВЛЕНИЯ | 1991 |
|
RU2061253C1 |
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ СИСТЕМ ПЕРЕДАЧИ ДАННЫХ | 1991 |
|
RU2029364C1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| МНОГОКАСКАДНЫЙ УСНЛИТЕЛЬ | 0 |
|
SU193579A1 |

