Изобретение относится к области навигации и может быть использовано в навигационных комплексах летательных аппаратов, преимущественно многоцелевых истребителей.
Известен навигационный комплекс [1], содержащий информационный комплекс вертикали и курса (инерциальную курсовертикаль), радиотехническую систему ближней навигации, автоматический радиокомпас, автоматический радиокомпас, блок коммутации, блок преобразования кодов, бортовую цифровую вычислительную машину и два пульта управления и ввода.
Известен навигационный комплекс летательного аппарата, раскрытый в описании полезной модели [2], являющийся по технической сущности наиболее близким к предлагаемому. Навигационный комплекс-прототип содержит первую бортовую цифровую вычислительную машину, спутниковую систему навигации, блок индикации и управления на основе многофункционального цветного индикатора и пилотажно-навигационный прибор, включающий систему воздушных сигналов, радиотехническую систему ближней навигации и первую инерциальную курсовертикаль.
Недостатками навигационного комплекса-прототипа являются недостаточные точность, отказоустойчивость и информативность.
Задачей, решаемой изобретением, является повышение точности, отказоустойчивости и информативности навигационного комплекса летательного аппарата.
Сущность изобретения заключается в том, что навигационный комплекс летательного аппарата, содержащий первую бортовую цифровую вычислительную машину (БЦВМ), спутниковую систему навигации (ССН), систему воздушных сигналов, радиотехническую систему ближней навигации (РСБН), первую инерциальную курсовертикаль, блок индикации и управления, дополнительно содержит вторую инерциальную курсовертикаль, первый блок коммутации, командно-пилотажный прибор, второй блок коммутации, блок аналого-цифровых преобразователей, блок вычисления скоростей, третий блок коммутации, пилотажно-навигационный прибор, четвертый блок коммутации, вторую (БЦВМ), блок устройств ввода-вывода (УВВ), блок разовых команд и пятый блок коммутации блок задания режима с соответствующими связями.
Сущность изобретения поясняется чертежом, на котором обозначены:
1 - первая БЦВМ;
2 - ССН;
3 - система воздушных сигналов;
4 - РСБН;
5 - первая инерциальная курсовертикаль;
6 - блок индикации и управления;
7 - вторая инерциальная курсовертикаль;
8 - первый блок коммутации;
9 - командно-пилотажный прибор;
10 - второй блок коммутации;
11 - блок аналого-цифровых преобразователей;
12 - блок вычисления скоростей;
13 - третий блок коммутации;
14 - пилотажно-навигационный прибор;
15 - четвертый блок коммутации;
16 - вторая БЦВМ;
17 - блок УВВ;
18 - блок разовых команд;
19 - пятый блок коммутации;
20 - блок задания режима;
21 - первый выход навигационного комплекса для связи с потребителями навигационной информации;
22 - второй выход навигационного комплекса для связи с потребителями навигационной информации;
23 - блок управления и связи.
В предлагаемой навигационной системе летательного аппарата:
Выход первой инерциальной курсовертикали 5 соединен с первыми входами первого и второго блоков 8 и 10 коммутации, выход второй инерциальной курсовертикали 7 соединен с вторыми входами первого и второго блоков 8 и 10 коммутации, выход первого блока 8 коммутации соединен со входом командно-пилотажного прибора 9 и вторым входом блока 17 УВВ, выход второго блока 10 коммутации соединен со входом блока 11 аналого-цифровых преобразователей, выход которого соединен со входом блока 12 вычисления скоростей, выход которого соединен с первыми входами первой и второй БЦВМ 1 и 16.
Выход системы 3 воздушных сигналов соединен со вторыми входами первой и второй БЦВМ 1 и 16.
Выход РБСН 4 соединен с третьими входами первой и второй БЦВМ 1 и 16.
Выход ССН 2 соединен с четвертым входом второй БЦВМ 16, вход ССН 2 соединен с пятым выходом второй БЦВМ 16.
Второй выход второй БЦВМ 16 соединен с первым входом блока 17 УВВ и входом блока 18 разовых команд, первый выход которого соединен с шестым входом второй БЦВМ 16, седьмой вход второй БЦВМ 16 соединен с первым выходом блока 17 УВВ.
Первый выход первой БЦВМ 1 соединен с первым входом третьего блока 13 коммутации, второй вход которого соединен со вторым выходом блока 17 УВВ.
Второй выход первой БЦВМ 1 соединен с первым входом четвертого блока 15 коммутации, второй вход которого соединен с первым выходом второй БЦВМ 16.
Второй выход блока 18 разовых команд соединен со вторым входом пятого блока 19 коммутации, третий выход первой БЦВМ 1 соединен с первым входом пятого блока 19 коммутации, выход которого соединен со входом РСБН 4,
Выход третьего блока 13 коммутации соединен со входом пилотажно-навигационного прибора 14.
Выход четвертого блока 15 коммутации является первым выходом 21 навигационного комплекса для связи с потребителями навигационной информации.
Третий выход второй БЦВМ 16 является вторым выходом 22 комплекса для связи с потребителями навигационной информации.
Четвертый выход второй БЦВМ 16 соединен со входом блока 6 индикации и управления, пятый вход второй БЦВМ 16 соединен с выходом блока 6 индикации и управления.
Выход блока 20 задания режима соединен с управляющими (У) входами третьего, четвертого и пятого блоков 13, 15, 19 коммутации.
Второй блок 10 коммутации, блок 11 аналого-цифровых преобразователей, блок 12 вычисления скоростей составляют блок 23 управления и связи.
Первый и второй входы второго блока 10 коммутации являются, соответственно, первым и вторым входами блока 23 управления и связи. Выход блока 12 вычисления скоростей является выходом блока 23 управления и связи. Первый, второй, третий входы первой БЦВМ 1, первый, второй, третий, пятый, шестой, седьмой входы второй БЦВМ 16, первый вход блока 17 УВВ, первый и второй входы четвертого блока 15 коммутации, вход блока 6 индикации и управления, вход блока 18 разовых команд являются входами интерфейсов последовательного кода в соответствии с ГОСТ 18977-79.
Второй выход первой БЦВМ 1, первый, второй, третий, четвертый выходы второй БЦВМ 16, первый выход блока 17 УВВ, выход четвертого блока 15 коммутации, выход блока 6 индикации и управления, первый выход блока 18 разовых команд, выход РСБН 4, выход системы 3 воздушных сигналов, выход блока 23 управления и связи, первый выход 21 для связи с потребителями навигационной информации, второй выход 22 для связи с потребителями навигационной информации являются выходами интерфейсов последовательного кода в соответствии с ГОСТ 18977-79.
Первый выход первой БЦВМ 1, выход первой инерциальной курсовертикали 5, выход второй инерциальной курсовертикали 7, выход первого блока 8 коммутации, выход третьего блока 13 коммутации, второй выход блока 17 УВВ являются выходами аналоговых сигналов.
Первый и второй входы первого блока 8 коммутации, вход командно-пилотажного прибора 9, первый и второй входы третьего блока 13 коммутации, второй вход блока 17 УВВ, первый и второй входы блока 23 управления и связи являются входами аналоговых сигналов.
Выход ССН 2 и пятый выход второй БЦВМ 16 является, в зависимости от типа используемой ССН 2, выходами последовательного интерфейса rs-232 или выходами интерфейсов последовательного кода в соответствии с ГОСТ 18977-79. Вход ССН 2 и четвертый вход второй БЦВМ 16 является, в зависимости от типа используемой ССН 2, входами последовательного интерфейса rs-232 или входами интерфейсов последовательного кода в соответствии с ГОСТ 18977-79.
Третий выход первой БЦВМ 1, второй выход блока 18 разовых команд, выход пятого устройства 19 коммутации является выходом параллельного интерфейса. Первый и второй входы пятого устройства 19 коммутации и вход РСБН 4 являются входами параллельного интерфейса. Данный параллельный интерфейс представляет собой набор линий разовых команд по ГОСТ 18977-79.
Совместное использование ССН 2, системы 3 воздушных сигналов, РСБН 4, первой и второй инерциальных курсовертикалей 5 и 7 обеспечивает высокоточное определение положения в пространстве и параметров движения летательного аппарата при отказе одной или нескольких из данных систем вследствие неисправности или невозможности функционирования из-за внешних условий (наличия радиопомех, неисправности или отсутствии наземных радиомаяков (ответчиков)).
Спутниковая система 2 навигации обеспечивает высокоточное определение параметров движения и координат летательного аппарата и используется для коррекции данных, поступающих от первой и второй инерциальных курсовертикалей 5 и 7 и от РСБН 4 или для автономного определения параметров движения и координат летательного аппарата в случае неработоспособности других систем. В качестве ССН 2 может быть использована любая известная спутниковая система навигации, имеющая выходную линию связи, выполненную в виде последовательного интерфейса rs-232/422 или в соответствии с ГОСТ 18977-79
Система 3 воздушных сигналов представляет собой набор барометрических датчиков, по данным которых определяется высота и скорость полета летательного аппарата. Эти данные в цифровом виде передаются по интерфейсам последовательного кода в первую и вторую БЦВМ 1 и 16.
Первая и вторая инерциальные курсовертикали 5 и 7 вырабатывают данные о курсе, крене и тангаже летательного аппарата. Эти данные в виде аналоговых сигналов поступают на соответствующие входы первого блока 8 коммутации и входы блока 23 управления и связи. Использование двух инерциальных курсовертикалей 5 и 7 обеспечивает повышение отказоустойчивости. При работе навигационного комплекса летательного аппарата используются данные от одной из двух инерциальных курсовертикалей 5 и 7. В случае выхода из строя одной из двух инерциальных курсовертикалей 5 и 7 при помощи первого блока 8 коммутации и второго блока 10 коммутации (входящего в состав блока 23 управления и связи) производится переключение, и данные о курсе, крене и тангаже летательного аппарата начинают поступать в командно-пилотажный прибор 9 и в первую и вторую БЦВМ 1 и 16 от другой инерциальной курсовертикали.
Первый блок 8 коммутации подключает командно-пилотажный прибор 9 и второй вход блока 17 устройств УВВ к выходу одной из двух инерциальных курсовертикалей 5 и 7.
Блок 23 управления и связи обеспечивает прием данных от одной из двух инерциальных курсовертикалей 5 и 7 (при помощи второго блока 10 коммутации), преобразование их из аналоговой формы в цифровую (при помощи блока 11 аналого-цифровых преобразователей), а также производит вычисление составляющих скоростей (при помощи блока 12 вычисления скоростей).
Данные о курсе, крене, тангаже и о составляющих скоростей поступают на первые входы первой и второй БЦВМ 1 и 16.
РБСН 4 определяет направление (пеленг) и дальность до наземных радиомаяков (ответчиков). По этим данным первая и вторая БЦВМ 1 и 16 производят вычисление параметров движения и координат летательного аппарата.
Блок 17 УВВ служит для сопряжения второй БЦВМ 16 с первой и второй инерциальными курсовертикалями 5 и 7 и пилотажно-навигационным прибором 14, которые используют аналоговые сигналы.
Блок 18 разовых команд осуществляет преобразование последовательных кодов, поступающих из второй БЦВМ 16 по интерфейсу последовательного кода в сигналы параллельного интерфейса.
Блок 6 индикации и управления служит для отображения навигационной информации и управления режимами работы навигационного комплекса летательного аппарата и входящих в него блоков и систем. Блок 6 индикации и управления содержит по крайней мере один многофункциональный бортовой индикатор.
Каждый многофункциональный бортовой индикатор содержит видеоиндикатор, выполненный в виде жидкокристаллической панели, и видеографический процессор, магистраль информационного обмена видеоинформацией, системную магистраль информационного обмена, электронно-вычислительную машину (ЭВМ), долговременное запоминающее устройство, адаптер ввода-вывода, панель управления, телевизионный видеоадаптер, регулятор яркости, регулятор контрастности, формирователь телевизионного сигнала, лампу подсвета видеоиндикатора, устройство управления, вентилятор принудительного обдува, обогреватель видеоиндикатора, формирователь управляющего напряжения лампы подсвета видеоиндикатора, первый датчик температуры, второй датчик температуры, первый датчик освещенности, второй датчик освещенности, регулятор яркости лампы подсвета видеоиндикатора, первую нить накала лампы подсвета видеоиндикатора, вторую нить накала лампы подсвета видеоиндикатора, вход полного телевизионного сигнала, вход цветоделенного телевизионного сигнала, вход первого последовательного канала, вход второго последовательного канала, вход третьего последовательного канала, выход последовательного канала, выход телевизионного сигнала, при этом входы видеоинформации видеоиндикатора соединены с магистралью информационного обмена видеоинформацией, выходы видеоинформации видеографического процессора соединены с магистралью информационного обмена видеоинформацией, входы-выходы информационного обмена видеографического процессора соединены с системной магистралью информационного обмена, входы-выходы информационного обмена ЭВМ соединены с системной магистралью информационного обмена, входы-выходы информационного обмена долговременного запоминающего устройства соединены с системной магистралью информационного обмена, входы-выходы информационного обмена адаптера ввода-вывода соединены с системной магистралью информационного обмена, первый вход адаптера ввода-вывода является входом первого последовательного канала многофункционального бортового индикатора, второй вход адаптера ввода-вывода является входом второго последовательного канала многофункционального бортового индикатора, третий вход адаптера ввода-вывода является входом третьего последовательного канала многофункционального бортового индикатора, выход адаптера ввода-вывода является выходом последовательного канала многофункционального бортового индикатора, к входам-выходам цифрового ввода-вывода ЭВМ подключена панель управления, выход телевизионного видеоадаптера соединен с входом оцифрованного видеосигнала видеографического процессора, к входу управления яркостью телевизионного видеоадаптера подключен регулятор яркости, к входу управления контрастностью телевизионного видеоадаптера подключен регулятор контрастности, первый вход телевизионного видеоадаптера является входом полного телевизионного сигнала многофункционального бортового индикатора, второй вход телевизионного видеоадаптера является входом цветоделенного телевизионного сигнала многофункционального бортового индикатора, входы видеоинформации формирователя телевизионного сигнала соединены с магистралью информационного обмена видеоинформацией, выход формирователя телевизионного сигнала является выходом телевизионного сигнала многофункционального бортового индикатора, к первому входу устройства управления подключен первый датчик температуры, ко второму входу устройства управления подключен второй датчик температуры, к третьему входу устройства управления подключен первый датчик освещенности, к четвертому входу устройства управления подключен второй датчик освещенности, к первому выходу устройства управления подключен вентилятор принудительного обдува, ко второму выходу устройства управления подключен обогреватель видеоиндикатора, третий выход устройства управления соединен со вторым входом формирователя управляющего напряжения лампы подсвета видеоиндикатора, четвертый выход устройства управления соединен с первым входом формирователя управляющего напряжения лампы подсвета видеоиндикатора, пятый выход устройства управления соединен с управляющим входом видеоиндикатора, к управляющему входу формирователя управляющего напряжения лампы подсвета видеоиндикатора подключен регулятор яркости лампы подсвета видеоиндикатора, к первому выходу формирователя управляющего напряжения лампы подсвета видеоиндикатора подключена лампа подсвета видеоиндикатора, ко второму выходу формирователя управляющего напряжения лампы подсвета видеоиндикатора подключена первая нить накала лампы подсвета видеоиндикатора, к третьему выходу формирователя управляющего напряжения лампы подсвета видеоиндикатора подключена вторая нить накала лампы подсвета видеоиндикатора.
Видеографический процессор обеспечивает формирование массива отображаемой информации в зависимости от режима работы многофункционального бортового индикатора в соответствии с принятой информацией от подсистем бортового оборудования и в соответствии с согласованным протоколом.
Видеографический процессор содержит контроллер системной магистрали информационного обмена, выполненный в виде контроллера магистрали ISA, процессор со встроенным оперативным запоминающим устройством, сторожевой таймер, постоянное запоминающее устройство для хранения программ, двухстраничное оперативное запоминающее устройство для хранения видеоинформации, схему управления оперативным запоминающим устройством и формирования сигналов магистрали информационного обмена видеоинформацией.
Системная магистраль информационного обмена выполнена в виде магистрали ISA.
ЭВМ выполнена в виде одноплатной PC-совместимой ЭВМ и предназначена для работы в качестве управляющего ядра.
ЭВМ содержит: центральный процессор, обеспечивающий выборку из памяти и выполнение кодов команд в соответствии с системой команд, процессор снабжен формирователем пониженного напряжения электропитания, интегрированный контроллер, включающий в себя элементы PC-совместимой периферии (контроллер прерываний, контроллер прямого доступа к памяти, интервальный таймер, часы реального времени, контроллеры последовательных каналов, контроллер системной магистрали ISA, компоненты пуска и синхронизации, адресные дешифраторы, конфигурационные регистры и регистры состояния), микросхему интегрального обрамления на основе программируемой матрицы, включающую в себя контроллер оперативного запоминающего устройства, контроллер механизма оконного доступа со схемой преобразования адреса, вспомогательные адресные дешифраторы, дополнительные схемы для полноформатного доступа к системной магистрали информационного обмена, схемы поддержки управления индикацией и приема входных команд, конфигурационные регистры и регистры состояния, микросхема снабжена конфигурационным постоянным запоминающем устройством, обеспечивающим загрузку логической функции при включении электропитания, оперативное запоминающее устройство, электроперепрограммируемое запоминающее устройство, энергонезависимое запоминающее устройство, снабженное диодно-конденсаторной схемой, поддерживающей независимое электропитание энергонезависимого запоминающего устройства в течение времени автосохранения, монитор электропитания, сторожевой таймер-счетчик, приемопередатчик последовательных каналов (каналов RS-232), внутренние и магистральные приемопередатчики, предназначенные как для усиления внешних сигналов, так и для усиления, развязки и/или преобразования внутренних сигналов.
Составные части ЭВМ объединены внутренними магистралями адреса и данных и сигналами управления.
Долговременное запоминающее устройство предназначено для хранения в энергонезависимой электроперепрограммируемой памяти информации, необходимой конкретному пользователю, например, полетные задания, карты местности и др.
Долговременное запоминающее устройство содержит микросхему интегрального обрамления на основе программируемой матрицы, включающую в себя контроллер оперативного запоминающего устройства, контроллер механизма оконного доступа ко всему адресному пространству энергонезависимой электроперепрограммируемой памяти, вспомогательные адресные дешифраторы, дополнительные схемы для изменения базового адреса долговременного запоминающего устройства на системной магистрали информационного обмена (магистрали ISA), схемы поддержки управления индикацией исполняемых в текущий момент команд, конфигурационные регистры и регистры состояния, микросхема снабжена конфигурационным постоянным запоминающим устройством, обеспечивающим загрузку логической функции при включении электропитания, оперативное запоминающее устройство, энергонезависимое электроперепрограммируемое запоминающее устройство, энергонезависимое запоминающее устройство, снабженное диодно-конденсаторной схемой, поддерживающей независимое электропитание энергонезависимого запоминающего устройства в течение времени автосохранения, магистральные приемопередатчики, предназначенные как для усиления внешних сигналов, так и для усиления, развязки и/или преобразования внутренних сигналов.
Составные части долговременного запоминающего устройства объединены внутренними магистралями адреса и данных и сигналами управления.
Адаптер ввода-вывода предназначен для ввода информации из внешних устройств и систем по трем последовательным каналам и вывода информации на внешние устройства и системы по одному последовательному каналу. Данные последовательные каналы выполнены в соответствии со стандартом ARINC 429 (ГОСТ 18977-79).
Адаптер ввода-вывода содержит контроллер системной магистрали информационного обмена (контроллер магистрали ISA), процессор, оперативное запоминающее устройство, постоянное запоминающее устройство, узел управления периферией, драйверы ввода-вывода последовательного кода ARINC 429 (ГОСТ 18977-79), драйверы ввода- вывода разовых команд, первый и второй генераторы тактовых импульсов и, формирователь сигнала "Исправность".
Панель управления размещается на лицевой части многофункционального бортового индикатора и состоит из набора многофункциональных кнопок, размещенных в обрамлении видеоиндикатора по периметру информационного поля. Электрически кнопки организованы в матрицу.
Телевизионный видеоадаптер предназначен для приема сигналов изображения аналогового вида различных форматов и преобразования их в цифровую форму. На входы телевизионного видеоадаптера через его первый вход поступают полный телевизионный сигнал и через второй вход цветоделенный телевизионный сигнал. Оцифрованный видеосигнал передается в видеографический процессор.
Телевизионный видеоадаптер содержит узел выделения синхросигналов, узел привязки к "уровню черного", первый узел фазовой автоподстройки частоты, второй узел фазовой автоподстройки частоты, третий узел фазовой автоподстройки частоты, узел обрезания строчных синхроимпульсов, приемник цветоделенного телевизионного сигнала, коммутатор видеосигналов, узел регулировки яркости, узел регулировки контрастности, буферный усилитель, усилитель компенсации ошибки сигнала, аналого-цифровой преобразователь, трехстраничное оперативное запоминающее устройство, узел управления.
Формирователь телевизионного сигнала обеспечивает возможность записи текущего вида индикации на видеоиндикаторе в реальном времени на регистрирующее устройство (например, на видеомагнитофон).
Формирователь телевизионного сигнала содержит узел управления, генератор синхросигналов, двухстраничное оперативное запоминающее устройство, цифроаналоговый преобразователь, преобразователь цветоделенного телевизионного сигнала в полный телевизионный сигнал, выходной буферный усилитель.
Устройство управления предназначено для управления обогревателем видеоиндикатора, вентилятором принудительного обдува, а также формирования сигналов регулирования напряжения, подаваемого на первую нить накала лампы подсвета видеоиндикатора и вторую нить накала лампы подсвета видеоиндикатора, а также сигналов регулирования рабочего напряжения лампы подсвета видеоиндикатора.
Устройство управления содержит четыре входных усилителя-нормализатора, однокристальную ЭВМ, канал коммутации цепи обогревателя видеоиндикатора, канал коммутации цепей первой нити накала лампы подсвета видеоиндикатора и второй нити накала лампы подсвета видеоиндикатора, канал коммутации цепи вентилятора принудительного обдува, узел аварийного отключения обогревателя видеоиндикатора, узел аварийного отключения первой нити накала лампы подсвета видеоиндикатора и второй нити накала лампы подсвета видеоиндикатора.
Вентилятор принудительного обдува и обогреватель видеоиндикатора предназначены для поддержания рабочей температуры видеоиндикатора.
Формирователь управляющего напряжения лампы подсвета видеоиндикатора напряжения подсвета предназначен для обеспечения лампы подсвета видеоиндикатора, а также обеспечение первой нити накала и второй нити накала регулируемыми рабочими напряжениями.
Основой формирователя управляющего напряжения лампы подсвета видеоиндикатора являются два конвертера: высоковольтный и низковольтный. Оба конвертера выполнены по схеме полумостового преобразователя с резонансной нагрузкой и трансформаторным выходом.
Низковольтный конвертор имеет на выходах два независимых напряжения накала.
Первый и второй датчики температуры предназначены для измерения температуры видеоиндикатора и лампы подсвета видеоиндикатора, соответственно.
Первый датчик освещенности служит для измерения внешней освещенности. Второй датчик освещенности предназначен для измерения освещенности, создаваемой лампой подсвета видеоиндикатора (измерения яркости лампы подсвета видеоиндикатора).
Выходы последовательных каналов многофункциональных бортовых индикаторов образуют выход блока 6 индикации и управления. Входы последовательных каналов многофункциональных бортовых индикаторов образуют вход блока 6 индикации и управления.
При помощи панелей управления многофункциональных бортовых индикаторов осуществляется управление навигационным комплексом летательного аппарата и определяется форма вывода информации на экранах многофункциональных бортовых индикаторов.
К входам полного телевизионного сигнала, входам цветоделенного телевизионного сигнала, входам последовательных каналов многофункциональных бортовых индикаторов могут быть подключены другие бортовые системы-источники информации (радиолокационные комплексы, системы управлением оружием, оптико-прицельные комплексы, БЦВМ и т.д.). Это позволяет выводить на экраны многофункциональных бортовых индикаторов, кроме навигационной, и другую информацию, необходимую для пилотирования летательного аппарата и/или обнаружения и сопровождения целей, применения оружия и т.д. (радиолокационную информацию, информацию, получаемую с оптико-прицельных комплексов, с телевизионных систем наведения оружия, информацию о состоянии бортовых систем, и оружия, карты местности и т.д.)
К выходам последовательных каналов многофункциональных бортовых индикаторов могут быть подключены различные бортовые системы (радиолокационные комплексы, системы управлением оружием, оптико-прицельные комплексы, БЦВМ и т. д.). Это позволяет, используя панели управления многофункциональных бортовых индикаторов, управлять этими системами (задавать различные режимы работы).
Первая БЦВМ 1 служит для обработки информации о курсе, крене, тангаже и составляющих скоростей летательного аппарата, получаемой с выхода блока 23 управления и связи, информации о скорости и высоте летательного аппарата, получаемой от системы 3 воздушных сигналов, информации о направлениях (пеленгах) на наземные радиомаяки (ответчики) и о расстояниях до них, получаемой от РСБН 4, для осуществления коррекции данных, полученных от одной из этих систем (одной из инерциальных курсовертикалей 5 и 7, системы 3 воздушных сигналов, РСБН 4) по данным, полученным от других систем, для осуществления сравнения полученных данных с полетным заданием, хранящимся в памяти первой БЦВМ 1, и для осуществления выдачи обработанной навигационной информации (в виде аналоговых сигналов), предназначенной для отображения на пилотажно-навигационном приборе 14 через свой первый выход на первый вход третьего блока 13 коммутации и для выдачи обработанной навигационной информации (в цифровом виде), предназначенной для передачи в бортовые системы-потребители навигационной информации, подключенные к первому выходу 21 для связи с потребителями навигационной информации (в системы управления оружием, непосредственно в оружие и т.д.) по интерфейсам последовательного кода через четвертый блок 15 коммутации. Первая БЦВМ 1 также обеспечивает выдачу по параллельному интерфейсу (через свой третий выход) сигналов, предназначенных для управления РСБН 4 навигации на первый вход пятого блока 19 коммутации.
На пилотажно-навигационном приборе 14 отображается информация о текущем и заданном курсах летательного аппарата.
Вторая БЦВМ 16, кроме функций, аналогичных функциям, выполняемым первой БЦВМ 1, осуществляет обработку данных, получаемых от ССН 2, что позволяет получать более точные навигационные данные. При этом информация, предназначенная для отображения на пилотажно-навигационном приборе 14, информация, предназначенная для передачи в бортовые системы- потребители навигационной информации, подключенные к первому выходу 21 для связи с потребителями навигационной информации (в системы управления оружием, непосредственно в оружие, в радиолокационные комплексы и т.д.) и сигналы, предназначенные для управления РСБН 4 выдается на вторые входы, соответственно, третьего, четвертого и пятого блоков 13, 15 и 19 коммутации. Причем сигналы, предназначенные для управления РСБН 4 выдаются в виде последовательных кодов и блоком 18 разовых команд преобразуются в сигналы параллельного интерфейса. Также вторая БЦВМ 16 в своей памяти содержит дополнительную информацию, необходимую для пилотирования летательного аппарата и применения оружия (карты местности, параметры наземных радиомаяков (ответчиков), параметры аэродромов, полетные задания, информацию о целях и т.д.). Эта информация и обработанные навигационные данные по интерфейсам последовательного кода через третий и четвертый выходы второй БЦВМ 16 выдаются, соответственно, в блок 6 индикации и управления и через второй выход 22 для связи с потребителями навигационной информации в подключенные к этому выходу бортовые системы-потребители навигационной информации (в системы управления оружием, непосредственно в оружие, в радиолокационные комплексы, индикатор на лобовом стекле и т.д.).
Таким образом, на экранах бортовых многофункциональных индикаторов, входящих в состав блока 6 индикации и управления отображается, кроме обработанной навигационный информации, полученной от первой или второй инерциальной курсовертикали 5 или 7, от ССН 2, системы 3 воздушных сигналов и РСБН 4, отображается дополнительная информация, полученная путем обработки информации, хранящейся в памяти второй БЦВМ 16, а также отображаются данные, полученные путем сопоставления информации, хранящийся в памяти второй БЦВМ 16 с данными, полученными от первой или второй инерциальной курсовертикали 5 или 7, от ССН 2, системы 3 воздушных сигналов и РСБН 4. Вся эта информация также выдается на второй выход 22 для связи с потребителями навигационной информации.
Блок 20 задания режима выдает на управляющие входы (У) третьего, четвертого и пятого блоков 13, 15 и 19 коммутации сигналы, в зависимости от которых в пилотажно-навигационный прибор, на первый выход 21 для связи с потребителями навигационной информации и в РСБН 4 навигационные данные и сигналы управления РСБН 4 поступают от первой БЦВМ 1 или от второй БЦВМ 16.
Навигационный комплекс летательного аппарата работает следующим образом.
Информация о курсе, крене, тангаже с первой и второй инерциальных курсовертикалей 5 и 7 поступают соответственно на первый и второй входы первого блока 8 коммутации и на первый и второй входы блока 23 управления и связи. Первый блок 8 коммутации подключает к выходу первой или второй инерциальной курсовертикали 5 или 7 командно-пилотажный прибор 9, на котором отображается информация о курсе, крене, тангаже летательного аппарата. Второй блок 10 коммутации, входящий в состав блока 23 управления и связи, подключает к выходу первой или второй инерциальной курсовертикали 5 или 7 блок 11 аналого-цифровых преобразователей, в котором данные о курсе, крене и тангаже преобразуются в цифровую форму. Далее эти данные поступают в блок 12 вычисления скоростей, который по ним вычисляет составляющие скоростей летательного аппарата.
Первая и вторая БЦВМ 1 и 16 получают с выхода блока 23 управления и связи информацию о курсе, крене, тангаже от первой или второй инерциальной курсовертикали 5 или 7 и информацию о вычисленных по данным первой или второй инерциальной курсовертикали 5 или 7 составляющих скоростей летательного аппарата от блока 12 вычисления скоростей, получают информацию о скорости и высоте летательного аппарата от системы 3 воздушных сигналов, получают информацию о направлениях (пеленгах) на наземные радиомаяки (ответчики) и о расстояниях до них от РСБН 4. Вторая БЦВМ 16 дополнительно получает данные от ССН 2.
Первая и вторая БЦВМ 1 и 16 независимо друг от друга осуществляют коррекцию данных, полученных от одной из систем (одной из инерциальной курсовертикалей 5 и 7, системы 3 воздушных сигналов, РСБН 4), по данным, полученным от других систем, осуществляют сравнение полученных данных с полетным заданием, хранящимся в памяти первой и второй БЦВМ 1 и 16, и осуществляют выдачу обработанной навигационной информации, предназначенной для отображения на пилотажно-навигационном приборе 14 и для передачи в бортовые системы-потребители навигационной информации, подключенные к первому выходу 21 для связи с потребителями навигационной информации (в системы управления оружием, непосредственно в оружие и т.д.), также осуществляет выдачу сигналов, предназначенных для управления РСБН 4.
В случае неисправности блока 23 управления и связи вторая БЦВМ 16 получает данные о курсе, крене и тангаже летательного аппарата через блок 17 УВВ с выхода первого блока 8 коммутации.
Кроме этого, вторая БЦВМ 16 осуществляет обработку данных, получаемых от ССН 2, что позволяет получать более точные навигационные данные. Также вторая БЦВМ 16 в своей памяти содержит дополнительную информацию, необходимую для пилотирования летательного аппарата и применения оружия (карты местности, параметры наземных радиомаяков (ответчиков), параметры аэродромов, полетные задания, информацию о целях и т.д.). Эта информация и обработанные навигационные данные по интерфейсам последовательного кода через третий и четвертый выходы второй БЦВМ 16 выдаются, соответственно, в блок 6 индикации и управления и через второй выход 22 для связи с потребителями навигационной информации в подключенные к этому выходу бортовые системы-потребители навигационной информации (в системы управления оружием, непосредственно в оружие, в радиолокационные комплексы, индикатор на лобовом стекле и т.д.).
На экранах бортовых многофункциональных индикаторов, входящих в состав блока 6 индикации и управления, кроме обработанной навигационный информации, полученной от первой или второй инерциальной курсовертикали 5 или 7, от ССН 2, системы 3 воздушных сигналов и РСБН 4, отображается дополнительная информация, полученная путем обработки информации, хранящейся в памяти второй БЦВМ 16, а также данные полученные путем сопоставления информации, хранящийся в памяти второй БЦВМ 16 с данными, полученными от первой или второй инерциальной курсовертикали 5 или 7, от ССН 2, системы 3 воздушных сигналов и РСБН 4. Также на экранах бортовых многофункциональных индикаторов отображаются данные от бортовых систем-источников информации (радиолокационных комплексов, систем управлением оружием, оптико-прицельных комплексов, БЦВМ и т. д. ), полученные через входы полного телевизионного сигнала, входы цветоделенного телевизионного сигнала, входы последовательных каналов многофункциональных бортовых индикаторов.
Обработанная навигационная информация, а также информация о заданном курсе из второй БЦВМ 16 через блок 17 УВВ и третий блок 13 коммутации поступает на вход пилотажно-навигационного прибора 14 и через четвертый блок 15 коммутации и первый выход 21 для связи с потребителями навигационной информации в бортовые системы-потребители навигационной информации, подключенные к первому выходу 21 для связи с потребителями навигационной информации (в системы управления оружием, непосредственно в оружие и т.д.). Также через блок 18 разовых команд и пятый блок 19 коммутации по параллельному интерфейсу в РСБН 4 поступают сигналы, необходимые для управления РСБН 4.
В случае неисправности второй БЦВМ 16 или блока 17 УВВ при помощи блока 20 задания режима на управляющие (У) входы третьего, четвертого и пятого блоков 13, 15 и 19 коммутации выдаются сигналы, которые переключают третий, четвертый и пятый блоки 13, 15 и 19 коммутации, и, на вход пилотажно-навигационного прибора 14 и в бортовые системы-потребители навигационной информации, подключенные к первому выходу 21 для связи с потребителями навигационной информации (в системы управления оружием, непосредственно в оружие и т.д.) обработанная навигационная информация, а также информация о заданном курсе и сигналы, необходимые для управления РСБН 4 начинают поступать из первой БЦВМ 1.
Каждый многофункциональный бортовой индикатор из входящих в состав блока 6 индикации и управления работает следующим образом.
При включении питания и достижения напряжениями питания своих рабочих значений происходит начальный сброс, инициализация и самотестирование ЭВМ, долговременного запоминающего устройства и адаптера ввода-вывода. Одновременно устройство управления на основании информации о температуре видеоиндикатора и лампы подсвета видеоиндикатора, соответственно от первого датчика температуры и второго датчика температуры, вырабатывает сигналы управления вентилятором принудительного обдува, обогревателем видеоиндикатора, а также сигналы управления разогревом лампы подсвета видеоиндикатора, а формирователь управляющего напряжения лампы подсвета видеоиндикатора вырабатывает в соответствии с циклограммой пождига управляющее напряжения лампы подсвета видеоиндикатора и напряжения, подаваемые на первую нить накала лампы подсвета видеоиндикатора и вторую нить накала лампы подсвета видеоиндикатора.
Когда видеоиндикатор и лампа подсвета видеоиндикатора приведены в рабочее состояние, устройство управления обеспечивает стабилизацию температурного режима видеоиндикатора и лампы подсвета видеоиндикатора, а также обеспечивает автоматическую регулировку яркости видеоиндикатора и лампы подсвета видеоиндикатора в зависимости от внешней освещенности (от данных первого датчика освещенности) и заданных пользователем установок при помощи регулятора яркости лампы подсвета видеоиндикатора.
Полный телевизионный сигнал, поступающий на вход полного телевизионного сигнала и цветоделенный телевизионный сигнал, поступающий на вход цветоделенного телевизионного сигнала телевизионным видеоадаптером преобразуются в цифровую форму и поступают на вход видеографического процессора. Яркость и контрастность изображения, передаваемого этими сигналами может быть отрегулирована при помощи, соответственно, регулятора яркости и регулятора контрастности. Видеографический процессор на основании данных, поступающих с телевизионного адаптера и данных, получаемых по системной магистрали информационного обмена из ЭВМ, а также загруженной из ЭВМ программы формирует изображение, которое по магистрали информационного обмена видеоданными передается в видеоиндикатор и отображается на нем. ЭВМ формирует данные и программы для видеографического процессора на основании данных, вводимых с панели управления, данных, записанных в долговременное запоминающее устройство и данных от внешних бортовых приборов и систем, получаемых при помощи адаптера ввода-вывода по первому, второму и третьему последовательному каналам, соответственно, через вход первого последовательного канала, вход второго последовательного канала и вход третьего последовательного канала. Через выход последовательного канала многофункциональный индикатор может выдавать данные и команды на внешние бортовые приборы и системы (например, выдавать команды, вводимые при помощи панели управления).
Передаваемое по магистрали информационного обмена видеоинформацией изображение также поступает на вход формирователя телевизионного сигнала, в котором из цифровой формы преобразуется в полный телевизионный сигнал и поступает на выход полного телевизионного сигнала.
Видеографический процессор работает следующим образом.
Контроллер системной магистрали информационного обмена, содержащий магистральные приемопередатчики и дешифратор, обеспечивает доступ ЭВМ в режиме прямого доступа к памяти к встроенному в процессор видеографического процессора оперативному запоминающему устройству. В это оперативное запоминающее устройство ЭВМ записывает информацию в виде графических примитивов и инструкций. Видеографический процессор под управлением программы, находящейся в его постоянном запоминающем устройстве для хранения программ, преобразует эту информацию в графический массив, который схемой управления записывается в первую страницу оперативного запоминающего устройства. В это же время происходит считывание массива из второй страницы запоминающего устройства и формирование сигналов магистрали обмена видеоинформацией, образующих один кадр. По окончании кадра происходит переключение и следующий кадр формируется из первой страницы запоминающего устройства, а в это же время вторая страница запоминающего устройства заполняется новым массивом.
Оцифрованный видеосигнал с телевизионного видеоадаптера поступает непосредственно на схему управления, без дополнительной обработки процессором.
Сторожевой таймер находится в пассивном состоянии при регулярном обращении к нему со стороны процессора. При длительном отсутствии обращений, то есть в случае сбоя процессора, таймер формирует сигнал рестарта процессора.
ЭВМ работает следующим образом. При включении и достижении напряжениями электропитания требуемых рабочих уровней монитор электропитания формирует импульс начального сброса. Параллельно конфигурационное постоянное запоминающее устройство загружает коды логической функции в микросхему интегрального обрамления. В пределах импульса начального сброса заканчивается конфигурирование микросхемы, приведение ее в исходное состояние и инициализация регистров интегрированного контроллера.
По окончании аппаратной процедуры начального сброса процессор ЭВМ начинает выборку кодов программы из вершины адресного пространства (зоны базовой системы ввода-вывода). Эта программа содержит процедуры начальной программной инициализации составных частей ЭВМ в соответствии с системой команд и функциональным назначением.
Два порта последовательных каналов (каналов RS-232) предназначены для загрузки программного обеспечения в электроперепрограммируемую память ЭВМ.
Долговременное запоминающее устройство работает следующим образом. При включении питания конфигурационное постоянное запоминающее устройство загружает коды логической функции в микросхему интегрального обрамления, затем импульс начального сброса сбрасывает ее, и начинается самоконтроль долговременного запоминающего устройства. Конфигурирование микросхемы и самоконтроль заканчиваются в пределах импульса начального сброса. Самоконтроль включает в себя следующую процедуру: внутренний автомат пытается прочитать идентификатор из энергонезависимого электроперепрограммируемого запоминающего устройства. Количество успешно прочитанных идентификаторов заносится в специальный регистр объема памяти энергонезависимого электроперепрограммируемого запоминающего устройства.
По окончании аппаратной процедуры начального сброса долговременное запоминающее устройство готово к работе.
Адаптер ввода-вывода работает следующим образом. Контроллер системной магистрали информационного обмена (контроллер магистрали ISA) обеспечивает доступ ЭВМ к оперативному запоминающему устройству адаптера ввода-вывода при помощи обращений к выделенным для адаптера ввода-вывода адресам портов ввода-вывода системной магистрали информационного обмена, а также программирование постоянного запоминающего устройства.
Драйверы ввода-вывода последовательного кода и драйверы ввода-вывода разовых команд обеспечивают преобразование внешних сигналов в вид, пригодный для использования узлом управления периферией, и наоборот.
Узел управления периферией получает управление от процессора адаптера ввода-вывода и обеспечивает необходимые логические преобразования при передаче поступающей извне информации в процессор и наоборот, из процессора - к выходным драйверам.
Процессор адаптера ввода-вывода под управлением программы, хранящейся в постоянном запоминающем устройстве, по мере поступления информации от внешних устройств считывает ее из узла управления периферией, производит ее предварительную обработку и запись в оперативное запоминающее устройство в виде массива. А также формирует циклограмму выдачи информации во внешние устройства. Вид циклограммы определяется программно.
Формирователь сигнала "Исправность" при регулярном обращении к нему со стороны процессора выдает сигнал низкого уровня, характеризующий исправную работу адаптера в целом. При отсутствии обращений, то есть при какой-либо неисправности, не позднее чем через определенное время сигнал снимается.
Первый и второй генераторы тактовых импульсов обеспечивают узлы адаптера ввода-вывода синхросигналами.
Телевизионный видеоадаптер работает следующим образом. Поступающий через первый вход полный телевизионный сигнал поступает одновременно на входы узла выделения синхросигналов и узла привязки к "уровню черного". С выходов узла выделения синхросигналов синхросигналы поступают на узел управления. Строчные синхронизационные импульсы также поступают на входы первого узла фазовой автоподстройки частоты и второго узла фазовой автоподстройки частоты, выходы которых соединены с узлом управления. Какой сигнал используется узлом управления (от первого узла фазовой автоподстройки частоты или от второго узла фазовой автоподстройки частоты), определяется тем, в каком одном из двух форматов поступает полный телевизионный сигнал. На вход третьего узла фазовой автоподстройки частоты поступают строчные синхронизационные импульсы цветоделенного телевизионного сигнала. Выходной сигнал третьего узла фазовой автоподстройки частоты используется узлом управления при работе с цветоделенным телевизионным сигналом.
Выходной сигнал узла привязки к "уровню черного" содержит собственно видеосигнал, "уровень черного" которого эквипотенциален общему сигнальному проводу телевизионного видеоадаптера, что необходимо для правильной оцифровки видеосигнала.
Узел обрезания строчных синхроимпульсов из видеосигнала убирает синхроимпульсы, имеющие напряжение отрицательной полярности. Это требуется для правильной работы аналаго-цифрового преобразователя.
Сигналы цветоделенного телевизионного сигнала, пройдя через приемник цветоделенного телевизионного сигнала, поступают на второй вход коммутатора сигналов; на его первый вход поступает видеосигнал с узла обрезания строчных синхроимпульсов. Рабочее направление коммутатора (номер входа) назначается в зависимости от выбранного источника видеоинформации с помощью команд и сигналов управления, подаваемых на узел управления от других блоков многофункционального бортового индикатора.
Видеосигнал с коммутатора сигналов, последовательно проходя через регулятор яркости, регулятор контрастности и буферный усилитель, поступает на прямой вход аналого-цифрового преобразователя. К инверсному входу аналого-цифрового преобразователя подключен выход усилителя компенсации ошибки видеосигнала, вызванной наведенными на общий провод помехами.
Узел управления тактирует работу аналого-цифрового преобразователя и определенным образом распределяет информацию четного и нечетного полукадров в первую, вторую и третью страницы оперативного запоминающего устройства. Режим чтения из оперативного запоминающего устройства организуется так, что на выходе узла управления формируется информация, характерная для прогрессивного способа развертки. Эта информация предназначена для видеографического процессора. При выдаче в видеографический процессор информации канала цветоделенного телевизионного сигнала оперативное запоминающее устройство не используются.
Формирователь телевизионного сигнала работает следующим образом.
Входные цифровые данные видеоизображения с магистрали информационного обмена видеоинформацией поступают в узел управления, который записывает кадр за кадром поочередно в первую и вторую страницы оперативного запоминающего устройства в формате прогрессивной развертки. Пока в одну страницу оперативного запоминающего устройства происходит запись данных, из другой страницы оперативного запоминающего устройства узел управления считывает данные в последовательности, обеспечивающие формирование чересстрочной развертки, и подает их на цифроаналоговый преобразователь. С выхода цифроаналогового преобразователя аналоговый цветоделенный телевизионный сигнал поступает на преобразователь в полный телевизионный сигнал. Сигнал с преобразователя проходит через выходной буферный усилитель, имеющий необходимую нагрузочную способность для работы на длинные линии связи.
Устройство управления работает следующим образом. На входы усилителей-нормализаторов, выполненных на операционных усилителях, поступают сигналы от первого датчика, второго датчика температуры, первого датчика освещенности, второго датчика освещенности. Выходные сигналы усилителей-нормализаторов поступают на четыре входа коммутатора встроенного в однокристальную ЭВМ аналого-цифрового преобразователя. На пятый вход коммутатора поступает сигнал с регулятора яркости лампы подсвета видеоиндикатора.
Однокристальная ЭВМ в зависимости от их величины входных сигналов в соответствии с заложенными алгоритмами формирует широтно-импульсно-модулированные сигналы подаваемые на первую нить накала лампы подсвета видеоиндикатора и вторую нить накала лампы подсвета видеоиндикатора, а также сигналы регулирования рабочего напряжения лампы подсвета видеоиндикатора, дискретные сигналы управления обогревателем видеоиндикатора и вентилятором принудительного обдува, трехразрядный код для подстройки яркости и цветности видеоиндикатора в зависимости от температуры.
Последовательно с электронными силовыми ключами цепей обогревателя видеоиндикатора, первой нити накала лампы подсвета видеоиндикатора и второй нити накала лампы подсвета видеоиндикатора включены нормально-замкнутые контакты исполнительных электромагнитных реле узлов аварийного отключения обогрева. На входные компараторы узлов аварийного отключения поступают сигналы с выходов усилителей-нормализаторов сигналов первого датчика температуры и второго датчика температуры. При перегреве видеоиндикатора лампы подсвета видеоиндикатора (в случае отказа основных контуров регулирования температуры от однокристальной ЭВМ) сигнал на выходе усилителя-нормализатора достигает порога срабатывания соответствующего компаратора, компаратор срабатывает, включает реле, которое разрывает своими контактами соответствующую цепь обогрева. Таким образом видеоиндикатор и лампа подсвета видеоиндикатора предохраняются от выхода из строя из-за чрезмерного нагрева.
Формирователь управляющего напряжения лампы подсвета видеоиндикатора работает следующим образом.
При включении питания высоковольтный конвертор обеспечивает выходное напряжение, необходимое для поджига лампы. После поджига напряжение снижается за счет слабой магнитной связи первичной и вторичной обмоток трансформатора до рабочего номинального значения.
Пуск лампы происходит по циклограмме (так называемому сценарию пуска), определяющей последовательность, время и величины подаваемых на электроды лампы напряжений. В процессе работы при регулировании яркости обеспечивается изменение рабочего напряжения и напряжения накала с обеспечением заданных соотношений. Для обеспечения указанных требований оба конвертера имеют входы управления, сигналы на которых разрешают или запрещают работу преобразователей, позволяя регулировать средние значения выходных напряжений. Эти широтно-импульсно-модулированные сигналы приходят на высоковольтный конвертор и низковольтный конвертор из устройства управления.
Таким образом предлагаемое изобретение обеспечивает повышение точности, отказоустойчивости и информативности навигационного комплекса летательного аппарата.
Представленные чертежи и описание предлагаемого изобретения позволяют, используя существующую элементную базу, изготовить его промышленным способом и использовать в навигационных системах летательных аппаратов: многофункциональных истребителей вертолетов и т.п., что характеризует предлагаемое изобретение как промышленно применимое.
Источники информации
1. Св. РФ N 14465 на ПМ, МПК G 01 C 23/00, опубл. 27.07.2000 г.
2. Св. РФ N 12608 на ПМ, МПК G 01 C 23/00, опубл. 20.01.2000 г., (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС НАВИГАЦИИ И ЭЛЕКТРОННОЙ ИНДИКАЦИИ | 2003 |
|
RU2215995C1 |
| СИСТЕМА ИНДИКАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2206872C2 |
| КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ САМОЛЕТА | 2002 |
|
RU2216484C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ БОРТОВОЙ ИНДИКАТОР | 2000 |
|
RU2162204C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2170410C1 |
| КОМБИНИРОВАННАЯ СИСТЕМА НАВИГАЦИИ | 2003 |
|
RU2229686C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2230294C1 |
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ВЕРТОЛЕТА | 2012 |
|
RU2520174C2 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2293950C1 |
| КОМБИНИРОВАННЫЙ НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2224220C1 |
Изобретение относится к области навигации и может быть использовано в навигационных комплексах летательных аппаратов, преимущественно многоцелевых истребителей. Навигационный комплекс содержит первую бортовую цифровую вычислительную машину, спутниковую систему навигации, систему воздушных сигналов, радиотехническую систему ближней навигации, первую инерциальную курсовертикаль, блок индикации и управления, вторую инерциальную курсовертикаль, первый блок коммутации, командно-пилотажный прибор, второй блок коммутации, блок аналого-цифровых преобразователей, блок вычисления скоростей, третий блок коммутации, пилотажно-навигационный прибор, четвертый блок коммутации, вторую бортовую цифровую вычислительную машину, блок устройств ввода-вывода, блок разовых команд, пятый блок коммутации, блок задания режима с соответствующими связями. Обеспечивается повышение точности, отказоустойчивости и информативности. 1 ил.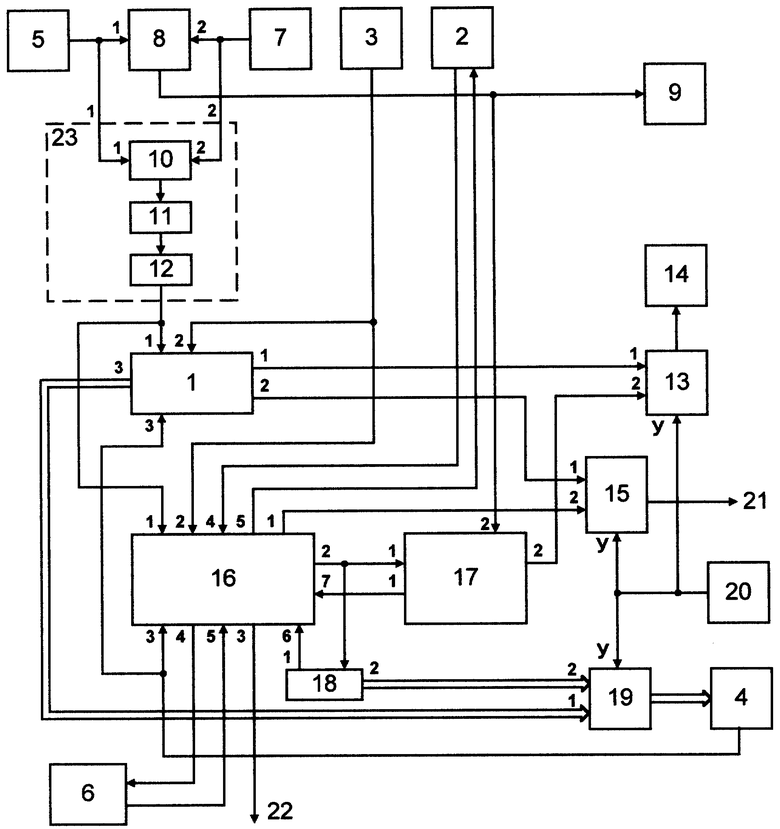
Навигационный комплекс летательного аппарата, содержащий первую бортовую цифровую вычислительную машину, спутниковую систему навигации, систему воздушных сигналов, радиотехническую систему ближней навигации, первую инерциальную курсовертикаль, блок индикации и управления, отличающийся тем, что дополнительно содержит вторую инерциальную курсовертикаль, первый блок коммутации, командно-пилотажный прибор, второй блок коммутации, блок аналого-цифровых преобразователей, блок вычисления скоростей, третий блок коммутации, пилотажно-навигационный прибор, четвертый блок коммутации, вторую бортовую цифровую вычислительную машину, блок устройств ввода-вывода, блок разовых команд, пятый блок коммутации, блок задания режима, при этом выход первой инерциальной курсовертикали соединен с первыми входами первого и второго блоков коммутации, выход второй инерциальной курсовертикали соединен с вторыми входами первого и второго блоков коммутации, выход первого блока коммутации соединен со входом командно-пилотажного прибора и вторым входом блока устройств ввода-вывода, выход второго блока коммутации соединен со входом блока аналого-цифровых преобразователей, выход которого соединен со входом блока вычисления скоростей, выход которого соединен с первыми входами первой и второй бортовых вычислительных машин, выход системы воздушных сигналов соединен со вторыми входами первой и второй бортовых вычислительных машин, выход радиотехнической системы ближней навигации соединен с третьими входами первой и второй бортовых вычислительных машин, выход спутниковой системы навигации соединен с четвертым входом второй бортовой вычислительной машины, вход спутниковой системы навигации соединен с пятым выходом второй бортовой вычислительной машины, второй выход второй бортовой вычислительной машины соединен с первым входом блока устройств ввода- вывода и входом блока разовых команд, первый выход которого соединен с шестым входом второй бортовой вычислительной машины, седьмой вход второй бортовой вычислительной машины соединен с первым выходом блока устройств ввода-вывода, первый выход первой бортовой вычислительной машины соединен с первым входом третьего блока коммутации, второй вход которого соединен со вторым выходом блока устройств ввода-вывода, второй выход первой бортовой вычислительной машины соединен с первым входом четвертого блока коммутации, второй вход которого соединен с первым выходом второй бортовой вычислительной машины, второй выход блока разовых команд соединен со вторым входом пятого блока коммутации, третий выход первой бортовой вычислительной машины соединен с первым входом пятого блока коммутации, выход которого соединен со входом радиотехнической системы ближней навигации, выход третьего блока коммутации соединен со входом пилотажно-навигационного прибора, выход четвертого блока коммутации является первым выходом навигационного комплекса для связи с потребителем навигационной информации, третий выход второй бортовой вычислительной машины является вторым выходом навигационного комплекса для связи с потребителями навигационной информации, четвертый выход второй бортовой вычислительной машины соединен со входом блока индикации и управления, пятый вход второй бортовой вычислительной машины соединен с выходом блока индикации и управления, выход блока задания режима соединен с управляющими входами третьего, четвертого и пятого блоков коммутации.
| Прием удаления железа из двуокиси олова, полученной из отбросов белой жести | 1929 |
|
SU15130A1 |
| КОМПЛЕКСНАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1993 |
|
RU2087867C1 |
| RU 2073210 C1, 10.02.1997 | |||
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1992 |
|
RU2077028C1 |
| US 3630079, 28.12.1971. | |||

