Изобретение относится к области авиационной техники, в частности к аппаратуре для проведения летных испытаний (ЛИ) летательных аппаратов (ЛА) и их бортового оборудования (БО) и предназначается для исследования характеристик ЛА на всех участках полета.
Известны оптические, радиотехнические, фотограмметрические методы [1] для определения траектории полета и пространственной ориентации ЛА, с применением которых в процессе ЛИ оцениваются характеристики ЛА, бортового оборудования по количественным действительным значениям параметров движения ЛА и измеряемых систем. Оптические и радиотехнические методы, использующие кинотеодолитные станции (КТС), лазерно-дальномерные системы слежения "Опал", "Янтарь", а также радиолокационные станции (РЛС), самолетные отражатели и радиоответчики, предполагают измерение дальности Д, азимута А, угла места, высоты, скорости для определения координат центра масс (X, Y, Z), составляющих скорости (Vx, Vy, Vz) и других параметров ЛА. Наземные средства внешне-траекторных измерений (ВТИ), оборудованные стационарными средствами траекторных измерений на основе КТС и оптико-электронных лазерно-дальномерных систем применяются при оценке взлетно-посадочных характеристик ЛА и характеристик пилотажно- навигационного оборудования (ПНО).
Однако необходимость в наземных станциях ВТИ, требующих специального их размещения и обслуживания ограничивает сферу практического использования КТС. Кроме того, методы ВТИ обладают рядом недостатков:
- ограниченная зона видимости (≈ 50км) и измерения значений параметров;
- зависимость от метеоусловий и выбора трасс;
- необходимость иметь на трассе наземные РЛС наведения (типа "Кама");
- отсутствие стационарных станций КТС и лазерно-дальномерных систем при испытании ЛА в различных ожидаемых условиях эксплуатации (жара, холод, высокогорье) при облете различных аэродромов для сертификации самолета;
- длительность последующей обработки.
Радиотехнические системы (РТС) на основе радиотехнической системы ближней навигации (РСБН) позволяют определять параметры дальности Д и азимута А на удалении 50-350 км и на основе радиотехнической системы дальней навигации (РСДН) - географические координаты. Однако данные системы позволяют определять ограниченный состав параметров и обладают недостаточной точностью (РЛС "Кама" и фазометрическая система типа "Висла" имеют точность до нескольких десятков метров в зависимости от удаления ЛА).
Фотограмметрические методы (ФГМ) [1] автономны и применяются для определения пилотажно-навигационных параметров в основном при выполнении маршрутных полетов. Метод базируется на получении на борту ЛА фотоснимков с помощью измерительной фотограмметрической аппаратуры со специальной наземной послеполетной обработкой. Сущность определения параметров пространственного положения ЛА заключается в определении параметров траектории по фотоснимку и в пересчете их в параметры ЛА. Основными недостатками ФГМ являются:
- необходимость установки аэрофотоаппарата;
- ограниченность района действия;
- зависимость от погодных условий;
- необходимость применения большого количества карт;
- трудоемкость обработки.
Известен комплекс стандартного пилотажно-навигационного оборудования для самолетов Ту-204 и Ил-96 (КСПНО) [2], взятый за прототип, бортовые траекторные измерения которого выполнены на основе вычислительной системы самолетовождения ВСС-85, включающий:
- БЦВМ;
- пульт управления и индикации;
- систему воздушных сигналов (СВС);
- бесплатформенную инерциальную навигационную систему (БИНС);
- радионавигационные системы ближней и дальней навигации;
- спутниковую навигационную систему (СНС);
- системы посадки;
- дальномер и измеритель магнитного курса;
- радиовысотомер.
Комплекс позволяет получить навигационные характеристики (курс, угол сноса, путевую скорость, инерциальным высоту и вертикальную скорость, крен и тангаж, угловые скорости и ускорения), высотно- скоростные параметры и угол атаки, взлетно-посадочные характеристики. Аппаратура ближней навигации обеспечивает получение непрерывной позиционной информации для коррекции счисленных координат самолета. Недостатками системы являются:
- малая точность измерения определяемых параметров пространственного положения ЛА в глобальной координатной сетке в различных системах отсчета координат при проведении ЛИ. Такая точность приемлема только для самолетовождения серийных самолетов, но не для оценивания траекторных параметров в интересах ЛИ;
- отсутствие оперативного анализа летного эксперимента на борту ЛА инженером-экспериментатором в реальном масштабе времени; длительность последующей обработки;
- большие временные затраты при выборе испытательных трасс в процессе проведения ЛИ ЛА. Такие затраты являются следствием отсутствия полного аэронавигационного банка данных, содержащего параметры испытательных трасс, полных сведений о радиомаяках, аэродромах и другой информации для обеспечения испытательных полетов.
В основу изобретения поставлена задача создания автономного бортового комплекса траекторных измерений, который обеспечил бы непрерывное получение действительных координат ЛА в реальном масштабе времени на всех режимах полета от взлета до посадки для определения всех необходимых характеристик ЛА и ПНО с высокой точностью, достаточной для их идентификации и использования для сертификации ЛА, независимо от географических условий применения, погодных условий, без использования наземных внешне-траекторных измерений.
Кроме того, комплекс должен обеспечить повышение производительности, снижение материальных затрат при определении характеристик ЛА в процессе ЛИ. Более того, комплекс должен обеспечить его использование на самолетах различных типов, оперативный контроль за процессом определения характеристик на борту ЛА.
Поставленная задача достигается тем, что в оборудование комплекса бортовых траекторных измерений (КБТИ), содержащего приемники и датчики информации, включающие спутниковую навигационную систему (СНС), инерциальную навигационную систему (ИНС), бортовую цифровую вычислительную систему (БЦВС), связанную своими входами с датчиками и приемниками информации, пульты управления и индикации, введены блок приведения данных к единому высокоточному времени (БПДЕВВ) и вычислитель определения действительных координат траектории ЛА и погрешностей систем (ВДКТПС), подсоединенные своим выходом соответственно к устройству сопряжения информации (УСИ) и БЦВС, при этом БПДЕВВ своим входом с вязан с выходом СНС, а ВДКТПС своими входами связан с УСИ, связи приемников и датчиков информации блока приведения данных к единому высокоточному времени (БПДЕВВ) с БЦВС и связи ВДКТПС с СНС и ИНС, РСБН, РСДН и другими осуществлены с помощью устройства сопряжения информации (УСИ), выполненного в виде контроллера, построенного по принципу асинхронного обмена информацией "программируемое расписание", связь блока определения действительных координат и погрешностей систем ВДКТПС с БЦВС выполнена через переключатель, связанный с пультом управления, что позволяет получить действительные значения координат с высокой точностью. В конкретных случаях применения на борту ЛА комплекс дополняется радиотехнической системой ближней и дальней навигации (РСБН и РСДН), доплеровской измерительной системой скорости и угла сноса (ДИСС), системой посадки с дальномером и измерителем магнитного курса, системой приборной посадки, радиовысотомером (РВ), системой воздушных сигналов (СВС), базой данных и блоком управления. БЦВС выполнена в виде автономных вычислителей навигационных параметров СНС - ИНС, параметров ближней и дальней навигации, декартовых координат, захода на посадку, высотно- скоростных параметров, взлетно-посадочных характеристик, параметров самолетовождения, при этом вычислители навигационных параметров СНС- ИНС, параметров ближней и дальней навигации, захода на посадку, высотно-скоростных параметров своими первыми входами связаны с выходами устройства сопряжения информации (УСИ), а каждый из вычислителей своим выходом подсоединен к блоку управления, вычислитель декартовых координат своим первым входом связан с базой данных, а выходом - с вторыми входами вычислителей захода на посадку, высотно- скоростных параметров, взлетно-посадочных характеристик, переключатель выполнен в виде логического блока с фиксированными приоритетами, первый, второй, третий и четвертый входы которого соединены соответственно с выходами ВДКТПС, вычислителей навигационных параметров СНС-ИНС и параметров ближней и дальней навигации и блока управления, а выход переключателя соединен с вторым входом вычислителя параметров ближней и дальней навигации, с вторым входом вычислителя декартовых координат, третьими входами вычислителей захода на посадку, высотно-скоростных параметров, вторым входом вычислителя взлетно-посадочных характеристик и входом вычислителя параметров самолетовождения, что позволяет определять действительные значения координат траекторных параметров различными способами: ИНС- СНС, ИНС-РСБН, ИНС-РСДН с соответствующей комплексной обработкой информации.
Такое выполнение комплекса позволяет повысить точность измерения определяемых действительных параметров пространственного положения ЛА в глобальной координатной сетке с точностью 2-5м (против 150-200 м - точность КСПНО). Кроме того, дает возможность проводить оперативный анализ летного эксперимента на борту ЛА инженером-экспериментатором и тем самым сократить длительность последующей обработки результатов ЛИ. Кроме того, наличие банка данных, содержащих параметры испытательных трасс, сведения о радиомаяках и другая информация позволяют уменьшить временные затраты при подготовке и выполнении испытательных полетов. В целом, выполнение КБТИ дает возможность в сжатые сроки проводить сертификацию современных и перспективных ЛА и пилотажно-навигационного оборудования без применения внешне-траекторных измерений во всех ожидаемых условиях эксплуатации ЛА.
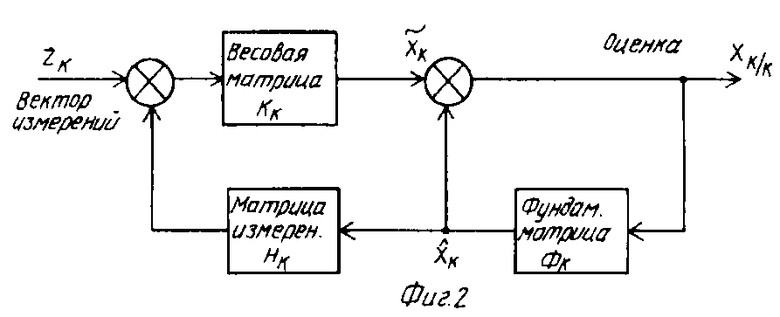
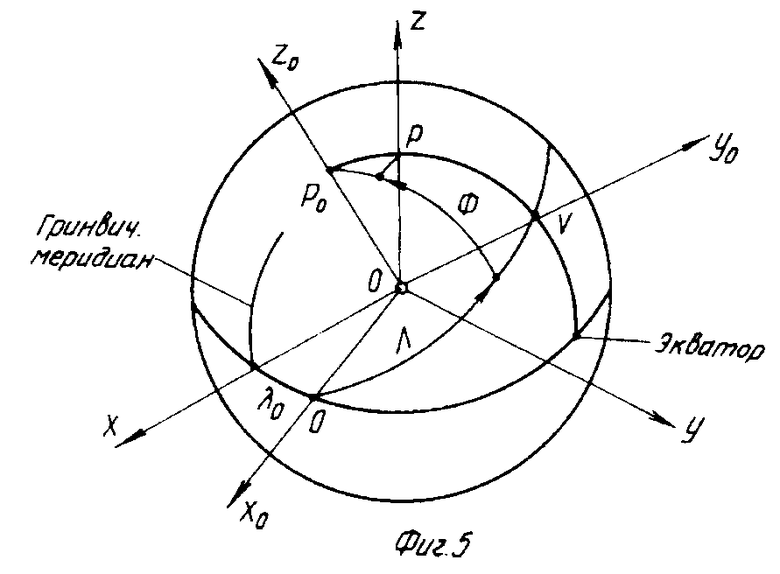
На фиг. 1 - представлена блок-схема КБТИ; на фиг.2 - блок-схема фильтра Калмана и на фиг.3,4,5 -системы координат' - соответственно геодезическая, геоцентрическая (топоцентрическая), ортодромическая.
В бортовой комплекс траекторных измерений (см. фиг.1) входит:
1 - спутниковая навигационная система (СНС);
2 - бортовая часть СНС;
3 - инерциальная навигационная система (ИНС);
4 - радиотехническая система дальней навигации (РСДН);
5 - радиотехническая система ближней навигации (РСБН);
6 - система посадки с использованием дальномера и указателя магнитного курса (VOR/DME);
7 - система приборной посадки;
8 - доплеровская измерительная система скорости и угла сноса (ДИСС);
9 - радиовысотомер (РВ);
10 - система воздушных сигналов (СВС);
11 - блок приведения данных к единому высокоточному времени (БПДЕВВ);
12 - устройство сопряжения информации (УСИ);
13 - вычислитель определения действительных координат траектории ЛА и погрешностей систем (ВДКТПС);
14 - переключатель;
15 - бортовая цифровая вычислительная система (БЦВС);
16 - вычислитель навигационных параметров СНС-ИНС;
17 - вычислитель параметров ближней и дальней навигации (РСБН-РСДН);
18 - вычислитель декартовых координат;
19 - база данных (БД);
20 - вычислитель параметров захода на посадку (ВЗП);
21 - вычислитель высотно-скоростных параметров (ВСП);
22 - вычислитель взлетно-посадочных характеристик (ВПХ);
23 - вычислитель параметров самолетовождения;
24 - пульт управления;
25 - блок управления;
26 - формирователь изображений;
27 - дисплей;
28 - система бортовых измерений;
29 - система документирования;
30 - дополнительные приемники и датчики информации, включаемые конкретных случаях.
Выход бортовой СНС 2 соединен с блоком приведения данных к единому высокоточному времени 11 и через УСИ 12 с входами вычислителя действительных координат траектории и погрешностей системы ВДКТПС 13 и вычислителем параметров СНС-ИНС 16, а их выходы соединены с первыми и вторыми выходами переключателя 14 и блоком управления 25, первым входом вычислителя декартовых координат 18, первым входом вычислителя взлетно-посадочных характеристик 22, первым входом вычислителя параметров захода на посадку 20, входом вычислителя параметров самолетовождения 23, первым входом вычислителя высотно-скоростных параметров 21, входящих в состав БЦВС-15. Вход вычислителя параметров систем РСБН-РСДН 17 соединен через УСИ 12 соответственно с РСБН 5, РСДН 4 и радиоприемником VOR/DME системы посадки 6, а выход вычислителя 17 связан с блоком управления 25, второй вход вычислителя декартовых координат 18 связан с базой данных 19, а выход его - с вторым входом вычислителя взлетно-посадочных характеристик 22 и блоком управления 25, вторым входом вычислителя высотно-скоростных параметров 21, вторым входом вычислителя захода на посадку 20, третий вход его связан через УСИ 12 с системой приборной посадки (например, ILS) и системой посадки VOR/DME 6, а выходы вычислителя параметров захода на посадку 20 и вычислителя взлетно-посадочных характеристик 22, вычислителя самолетовождения 23, вычислителя высотно-скоростных параметров 21 связаны соответственно с блоком управления 25, а третий вход вычислителя высотно-скоростных параметров 21 через УСИ 12 связан с ДИСС 8, РВ 9, СВС 10, выход блока приведения данных к единому высокоточному времени (БПДЕВВ) 11 связан с УСИ 12, а выход блока управления 25 связан с четвертым входом переключателя 14, с системой бортовых измерений 28, с системой документации 29, с формирователем изображений 26, выход которого связан с дисплеем 27, входящим в состав пульта управления 24.
КБТИ строится на основе методов комплексной обработки информации от прецизионной инерциальной, спутниковой, радиотехнических систем и систем высотно-скоростных параметров, поступающих в бортовую цифровую вычислительную систему БЦВС-15, объединяющую бортовые вычислители. Взаимодействие БЦВС-15 с датчиками и потребителями обеспечивается по каналам последовательного кода и каналам межмашинного обмена.
БЦВС-15 решает задачи приема информации от датчиков, обработки и анализа информации, формирования выходных данных, в них реализованы также сервисные программы обеспечения режимов работ оператора. Для этого используется комплексная обработка информации (КОИ) в вычислителе ДКТПС-13, результатом которой являются высокоточные действительные значения параметров движения ЛА. Действительные значения параметров используются для вычисления погрешностей систем. Если X значение одного из параметров какой-либо оцениваемой характеристики ЛА, а Xдейств. - действительное полученное значение соответствующего параметра, то погрешность данной системы или характеристики ЛА определяется по формуле
Повышение точности формирования действительных значений пилотажно-навигационных параметров достигается использованием оптимальной КОИ с реализацией фильтра Калмана. Алгоритм КОИ с использованием избыточной информации данных систем СНС 2, РСДН 4, РСБН 5 обеспечивает оценку и компенсацию в процессе обработки погрешностей ИНС-3 Компенсация в сигналах ИНС-3 погрешностей параметров с помощью КОИ позволяет формировать высокоточные действительные значения навигационных и пилотажных параметров.
В процессе комплексной обработки информации в вычислителе 13 с помощью фильтра Калмана (19 порядка) оцениваются следующие погрешности инерциальных систем:
Δ∧ϕ, Δ∧λ - погрешности определения координат;
Δ∧VN,Δ∧VE - погрешности определения составляющих скорости; - погрешности определения вертикали и азимутального угла;
- погрешности определения вертикали и азимутального угла; - компенсации постоянных составляющих гироскопов;
- компенсации постоянных составляющих гироскопов; - погрешности измерения угловых скоростей ЛА бесплатформенных ИНС (для БИНС);
- погрешности измерения угловых скоростей ЛА бесплатформенных ИНС (для БИНС);
 - дрейфы гироскопов, пропорциональные ускорениям (ИНС);
- дрейфы гироскопов, пропорциональные ускорениям (ИНС); - погрешности акселерометров, пропорциональные действующим ускорениям.
- погрешности акселерометров, пропорциональные действующим ускорениям.
Для оценки погрешностей вертикального канала ИНС-3 используется фильтр Калмана 4 порядка, формирующий оценки следующих погрешностей:
Δ∧H - - погрешность определения высоты;
Δ∧Vz - - погрешность определения вертикальной скорости;
Δ∧gzo - погрешность компенсации ускорения силы тяжести;
Δ∧mzo - погрешность масштабного коэффициента вертикального акселерометра.
Действительные значения параметров формируются путем исключения из сигналов ИНС 3 соответствующих оценок погрешностей:
Работа КБТИ в режиме КОИ дает возможность получения высокоточных действительных значений навигационно-пилотажных параметров на протяжении всего полета. Так информация БИНС 3 используется как основная, в качестве избыточной информации используются данные СНС 2.
Модель погрешностей СНС 2 представляется в виде дискретного случайного процесса типа белого шума с известной дисперсией. Алгоритм калмановской фильтрации обеспечивает наилучшие линейные оценки вектора состояния системы Xк в момент времени tk, когда Xк определяется из уравнения состояния:
Xк+1 = Фк+1,кXк+gk (3)
и вектор измерения Zк представляется в виде
Zк = HxXк + rk (4)
Здесь gk, rk - независимые шумы с нулевыми средними значениями и матрицей ковариаций;
COV[gk] = Qk; COV[rk] = Rk (5)
Фк+1,к - фундаментальная матрица, Hк - матрица измерения.
Алгоритм состоит из двух этапов и имеет следующий вид:
- оценка вектора состояния между измерениями дается уравнением
Хк/к-1 = Фк,к-1•Хк-1/к-1 (6)
- оценка при измерении
где
Хк(к-1), Хк/к - априорная и апостериорная оценки вектора состояния Х на к-м шаге;
Рк/к-1, Рк/к - априорная и апостериорная ковариационные матрицы на к-м шаге.
Кк - весовая матрица, фиг.2.
Для преодоления численных трудностей, связанных с возможной потерей свойств симметрии и положительной определенности ковариационной матрицы и повышения точности оценок используется метод фильтрации с квадратичным представлением ковариационной матрицы - метод квадратного корня из матрицы, основанный на представлении ковариационной матрицы P в виде P = S.S, где S - верхне- или нижнетреугольная квадратная матрица [3].
Для обеспечения данной обработки с целью исключения влияния переходных процессов в фильтре Калмана на точность оценок погрешностей ИНС-3 на начальном участке полета используются алгоритмы сглаживания оценок, позволяющие получать равноточные погрешности ИНС-3 от взлета до посадки ЛА.
Вычислитель 16 определяет действительные значения траекторных параметров по информации СНС-2 и ИНС-3. Значения широты ϕД, долготы λД и высоты Hд определяются с помощью следующих соотношений:
Hд = hснс + Vн(t-tснс).
где ϕснс,λснс,hснс - координаты ЛА, выдаваемые СНС-2 в момент времени tснс,
VN, VE, Vн - составляющие вектора скорости, взятые из выходных параметров ИНС-3;
rN, rE - радиусы кривизны земного эллипсоида;
t - текущее время. Значения остальных выходных параметров полагаются равными соответствующим значениям параметров, полученных от СНС-2.
Вычислитель 18 определения декартовых координат и скорости позволяет производить преобразование:
- геодезических координат B - широта, L - долгота, H - высота для ЛА в декартовые координаты X, Y, Z;
- северную VN восточную VE и вертикальную Vy составляющие скорости ЛА в проекции скорости в декартовой системе координат Vx, Vy, Vz.
Координаты точки M, вознесенной над эллипсоидом на высоту H = MM, будут равны:
где
ξ - разность между астрономической и геодезической широтой и вычисляется по формуле:
a - большая полуось эллипсоида Земли; e - эксцентриситет эллипса.
Используемые системы координат:
- правая прямоугольная геоцентрическая система координат Oξζη, фиг. 4.
- декартовая система координат OXYZ, начало координат в точке BoLoHo, ось OY совпадает с направлением вертикали, Ao - угол между осью OX и направлением на север.
Проекции вектора  местоположения ЛА относительно фиксированной точки аэродрома (аэродром посадки) и вектора скорости V для ЛА в геоцентрической системе координат определяются:
местоположения ЛА относительно фиксированной точки аэродрома (аэродром посадки) и вектора скорости V для ЛА в геоцентрической системе координат определяются:
где
ξ,ζ,η - координаты ЛА в геоцентрической системе координат.
a - большая полуось эллипсоида;
ε - эксцентриситет эллипсоида.
Составляющие скорости определяются:
Проекции векторов  в декартовой системе координат OXYZ определяются
в декартовой системе координат OXYZ определяются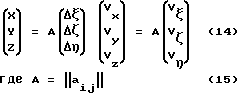
- матрица направляющих косинусов осей одного трехгранника относительно другого.
a11=-sinBocosLocosAo-sinLo sinAo
a12=-sinBosinLocosAo+cosLo sinAo
a13=cosBocosAo; a21=cosBocosLo; (16) a22=cosBosinLo
a23=sinBo; a31=sinBocosLosinAo-sinLocosAo
a33=sinBosinLosinAo+cosLocosAo; a35=-cosBosinAo
Вычислитель декартовых координат соединено БД-19, где находятся данные (координаты) облетаемых ЛА аэродромов. Находятся прямоугольные топоцентрические координаты ЛА:
Проекции составляющих геоцентрических координат относительно начала топоцентрической системы:
Прямоугольные геоцентрические координаты ЛА и начала прямоугольной топоцентрической системы координат
В вычислителе параметров 17 ближней и дальней навигации РСБН-РСДН координаты ϕД,λД , Hд пересчитываются в декартовой системе координат X, Y, Z по формулам (9) в геодезической системе по формулам:
где (X1, Y1, Z1) и (X2, Y2, Z2) - прямоугольные координаты точек 1 (ВПП) и 2(РСБН); работа РСБН в пределах прямой видимости
В вычислителе 22 взлетно-посадочных характеристик ЛА используется правая декартовая земная система координат, начало которой связано с ближним торцом ВПП фиг. 4. Ось OXg направлена вдоль оси ВПП в направление взлета или посадки, ось OYg вертикальна плоскости местной горизонтали, а ось OZg образует правую тройку.
Земная скорость ЛА определяется согласно формуле:
Путевая скорость определяется как
Угол наклона траектории вычисляется по формуле
Путевой угол вычисляется по формуле:
Траекторный угол скольжения вычисляется:
βтр= ψп-ψвпп+ψ (26)
Определяется дистанция взлета
Lвзл = Xт - Xо, (27)
где Xт - координата точки окончания взлета; Xт - соответствует моменту прохождения высоты H = 10,7м;
Xо - координата точки старта, Xo - соответствует моменту, когда продольное ускорение ЛА принимает значение nx ≥ 0,05 e.n. Дистанция прерванного взлета определяется:
Lпрер.взл = Xост - Xо, (28)
где Xост - координата точки окончания взлета;
Xо - координата точки старта;
Дистанция посадки определяется:
Lпос = X - Xо, (29)
где X - координата ЛА в момент прохождения им высоты H=15 м.
Xо - координата ЛА в момент его полной остановки, когда hx меняет знак hx = ± 0,05e.n.
Отклонение ЛА от глиссады определяется
ΔHгл= YД-(XД-XгN)tgθгл (30)
где Xгм - продольная координата глиссадного маяка;
θгл - угол наклона глиссады.
Просадка (потеря высоты) в процессе вывода ЛА из режима снижения при уходе на второй круг вычисляется
ΔHyx= H-Hyx, (31)
где
H - высота принятия решения об уходе на второй круг;
Hyx - минимальная высота над поверхностью ВПП в процессе ухода на второй круг, Hyx = min (Уд).
Поверхности ограничений препятствий описываются соотношениями:
Ногр.взл=Кв.Xво
Ногр.пос=Кп.Хпо
Zог=Kz.Xбок., (32)
где Кп, Xпо; Кв, Хво; Kz, Zпро - соответственно градиенты наклона и координаты пересечения поверхности ограничения препятствий с поверхностью земли при посадке, взлете и боковой поверхностью ограничения(1/р, м).
Высота пролета над поверхностью ограничений препятствий определяется:
В вычислителе 21 высотно-скоростных параметров реализован скоростной метод определения аэродинамических поправок (давления) по скорости ЛА Va, на основе информации от ИНС о путевой скорости, проекциях путевой скорости на координатные оси X, Z, путевом угле и о текущих значений воздушной и приборной скорости от СВС-10. Кроме того, дополнительно необходимы значения барометрической высоты Hбар, температуры T наружного воздуха, угол атаки (местный или истинный), углы крена и тангажа.
Погрешность определяется по формуле
δVA= Vпр-Δ•V+δVсж (34)
где Vпр - приборная скорость, среднее значение на режиме (км/ч),
Δ - относительная плотность воздуха  ;
;
δVсж - поправка скорости на сжимаемость;
Pн, Tн - давление и температура воздушной среды.
Истинная воздушная скорость V определяется
где Δψ - неточность выдерживания курса на встречных проходах,
Vx1, Vx2, Vz1, Vz2 - проекции путевой скорости на координатные оси.
На установившемся горизонтальном полете вычисляются средние значения путевой скорости Vпут, угла курса, приборной скорости Vпр и т.д. в виде:
После выполнения разворота и второго прохода средние значения вычисляются в соответствии с указанной формулой (36). По окончании режима получается расчет аэродинамической поправки по скорости Va для соответствующего значения скорости, пересчет полученной поправки в остальные значения (Ha, Ma) и выдача результатов для накопления.
В вычислителе параметров 20 захода на посадку реализуются алгоритмы определения отклонений от курсоглиссадных зон Δεк,Δεг отклонений курса Δψ в моменты от захвата курсоглиссадных зон до касания ВПП или траекторные отклонения ΔΗ,ΔΖ
В вычислителе параметров 23 самолетовождения (определяются погрешности частноортодромических координат в горизонтальной (ΔZ) и продольной (ΔS) плоскостях, которые необходимы для оценки режимов, а также действительные значения пройденного ЛА расстояния Sпр.д - расстояние, пройденное ЛА между коррекциями SΔΣ . Эти параметры необходимы для оценки самолетовождения в горизонтальной плоскости на маршруте и при маневрировании самолета в 100 км-зоне аэродрома. Для этого в вычислителе 23 пересчитываются действительные геодезические координаты ϕД,λД (B, L) в частноортодромические Zд, Sд.
Погрешности текущей точки M в ортодромической системе координат задаются ортодромической широтой B, ортодромической долготой L и расстоянием R до центра Земли.
Вычисления B, L, R производится по формулам:
R=Rср=a (38)
X0=XдcosL0+YдsinL0
Y0=-XдcosB0sinL0+Yд cosB0 cosL0+ZдsinB0 (39)
Z0=XдsinB0sinL0-Yд sinB0cosL0+ZдcosB0
Погрешности в определении координат в вычислителе самолетовождения определяются как
где Zтекнв и Sтекнв - текущие параметры, поступающие из навигационного вычислителя
Действительное значение расстояния, пройденного ЛА между коррекциями определяется по формуле:
где
Sднач - длина ортодромии, соответствующая начальному значению участка;
Sдi - сумма длин ортодромий, заключенных между начальной и конечной для данного участка расчета Sд.
Sдкон - длина ортодромии, соответствующая конечному участку.
СНС(1-2) включает в себя 22 навигационных спутника, которые располагаются таким образом на своих орбитах, что в каждый момент времени в любой точке Земли наблюдается не менее 4-х спутников; прием сигнала от n-навигационного спутника позволяет определить на ЛА необходимые величины:
Благодаря тому, что спутник по каналу связи сообщает постоянные параметры своей орбиты, на ЛА вычисляются его координаты ϕ,λ H и скорость Vxn, Vyn, Vzn и по принимаемому сигналу определяется дальность Dn(t) между ЛА и спутником и Dn(t) ее изменения.
При измерении навигационных параметров Dn(t) и Dn(t) со спутника передается высокочастотный сигнал, модулированный по фазе с помощью временной функции, форма которой заранее известна и на спутнике и на ЛА.
Обычно это последовательность прямоугольных импульсов положительной и отрицательной полярности - псевдошумовая последовательность: закон чередования положительных и отрицательных импульсов известен на спутнике и на приемном пункте - принятый высокочастотный сигнал демодулируется и после этого псевдошумовая последовательность и псевдошумовой сигнал такой же формы, вырабатываемый в приемном устройстве, привязываются к общему времени с помощью самолетных эталонов частоты. По временному сдвигу между этим сигналом и сигналом со спутника определяется время прохождения радиоволн со спутника к ЛА и расстояние Dn(t) между ними. Скорость Vn(t) = Dn(t) изменения дальности определяется либо по скорости "слежения" генерируемого на борту псевдошумового сигнала за принимаемым сигналом, либо по доплеровскому сдвигу принимаемого радиосигнала.
Элементы орбиты спутника, которые с высокой точностью можно считать постоянными в течение 1-2 ч. передаются со спутника с интервалом всем потребителям. По элементам орбиты и бортовому времени вычисляются декартовы координаты Xsn, Ysn, Zsn спутника для любого наперед заданного (текущего) момента времени, а уже по расстояниям до трех спутников, находящихся в известных точках пространства, определяется местоположение ЛА. По значениям скорости изменения дальности до трех спутников вычисляется вектор V земной скорости ЛА.
Сигналы спутников излучаются в двух диапазонах частот для потребителей с санкционированным доступом (повышенная точность измерений) и доступным для любого потребителя. Для повышения точностных характеристик используется дифференциальный метод определения координат местоположения, суть которого заключается в выявлении и учете в виде поправок сильнокоррелированных составляющих погрешностей навигационных параметров с помощью наземных контрольных пунктов (НКП). На НКП с помощью аппаратуры потребителя определяются координаты и сравниваются с данными геодезической привязки. Затем производится расчет соответствующих потребителям СНС заданного района, что позволяет им, вводя поправки, повышать точность навигационного определения.
ИНС-3 платформенного или бесплатформенного типа [2] обеспечивает автономное счисление координат местоположения ЛА и высоты полета путем интегрирования измеряемых акселерометрами ускорений. Настройка инерциальной системы на период шуллера (84,4мин) обеспечивает построение невозмущаемой ускорениями вертикали в полете.
Бесплатформенная инерциальная система (БИНС) обеспечивает определение и выдачу потребителю ЛА следующих параметров: географические координаты, путевую скорость и составляющие путевой скорости, угловые положения ЛА, угловые скорости ускорения, вертикальную скорость и высоту.
БИНС-3 по сравнению с платформенными обеспечивает определение большего количества параметров движения ЛА и строится на базе лазерных гироскопов, обеспечивая их более высокую надежность и малое время готовности.
РСБН измеряет прямолинейные расстояния Dr и азимут Ar от маяка на ЛА. Для этого самолетный бортовой передатчик излучает импульсы, которые переизлучаются наземным маяком. По временному промежутку Ts между измеренным и принятым импульсом определяется расстояние Dr= 0,5TsC, где C - скорость распространения радиоволн. Для измерения угла Ar антенна радиомаяка имеет узкую диаграмму направленности, которую можно представить себе в виде полуплоскости, проходящей через местную для маяка вертикаль и вращающуюся вокруг этой вертикали с постоянной и известной скоростью, В момент прохождения этой полуплоскостью плоскости меридиана (в Северном его направлении) другая всенаправленная антенна излучает сигнал, который принимается на ЛА. Второй сигнал принимается на борту, когда ЛА попадает в плоскость диаграммы направленности. По временному интервалу Та между двумя импульсами можно судить об азимуте Ar - Та.
РСДН-4 обеспечивает измерение двух разностей Д12 и Д13 между дальностями Д1, Д2, Д3.
Д12= Д2-Д1; Д13= Д3-Д1, где Д1, Д2, Д3 - кратчайшие расстояния между ЛА и ведущей 1 и ведомыми 2,3 радиостанциями. Физическим носителем информации в этой системе являются временные задержки Т12 и Т13 прихода на ЛА импульсов от ведущей и ведомых радиостанций. Ведущая радиостанция (излучает импульс, принимаемый на ЛА и на каждой из ведомых радиостанций, которые по истечении времени кодовых задержек ( (τ2,τ3) ) в свою очередь излучают импульсы, достигающие ЛА, при этом Т12 и Т13 будут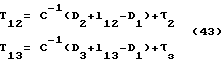
где l12 и l13 - известные расстояния между ведущей и ведомыми 2,3 радиостанциями.
По измеренным величинам Т12 и Т13 вычисляются разность Д12 и Д13.

РСДН строится на основе фазового (или импульсно-фазового) метода измерения времени запаздывания. Описание нижеприведенных систем дается в источниках: Система VOR/DME-16 [5] , система посадки ILS-7 [5], ДИСС-8[4], РВ-9[4], СВС-10[4].
Устройство сопряжения информации (УСИ) 12 - синхронное устройство-контроллер - устройство управления системами-датчиками. Асинхронный принцип обмена информацией обеспечивает независимость работы систем комплекса, УСИ-12, запоминающих и арифметических устройств вычислителей. Для систем КБТИ характерны следующие этапы работы. Полный цикл Тпц работы складывается из подготовки кванта информации, сводимой к преобразованию способов кодирования представления информации - Тподг.; передачи подготовленного кванта между регистрами данных систем-датчиков и соответствующими регистрами ввода УСИ - Тперед.; ожидания, в течение которого действия в системах-датчиках приостанавливаются до получения сигналов, разрешенных от процессоров вычислителей. Переход от этапа к этапу осуществляется под воздействием сигналов управления в определенной последовательности, повторяющиеся элементы которой образуют полный цикл работы систем датчиков и УСИ-12 - Тпц. Для асинхронных систем- датчиков цикл имеет переменную длительность, определяемую слагаемыми
Тпц=Тподг.+Тперед.+Тожид.,
причем непостоянство длительности его объясняется непостоянство Тподг. и Тожид., т. к. моменты времени передачи и приема с учетом задержки на линиях связи должны совпадать, то для обеспечения данного условия в УСИ 12 предусматривается буферизация - введение буферного запоминающего устройства, позволяющего задерживать момент приема кванта информации относительно момента его выдачи.
УСИ 12 преобразует последовательные коды в коды БЦВС 15 и обратно - коды БЦВС 15 в последовательные коды и разовые команды. УСИ 12 связан с испытываемой бортовой аппаратурой для электрического согласования контролируемых сигналов и преобразования в цифровую форму сигналов датчиков бортовых систем. УСИ-12 включает модуль обмена для сопряжения с линией передачи информации и выполняет адресованные ему команды, производит управление работой всех модулей блока. Модуль последовательного кода осуществляет прием и выдачу последовательного кода. Модуль аналоговых и разовых сигналов осуществляет прием и выдачу аналоговых и разовых сигналов.
Ввод информации от СНС 2, ИНС 3 и других осуществляется с помощью адаптера из состава УСИ 12. Интерфейсный модуль (последующий) обеспечивает ввод в полном объеме одновременно информационные потоки по ГОСТУ-18977-79 (ARiN 429). Установленный таймер дает возможность выполнять временную привязку каждого вводимого слова, что позволяет определять циклограмму выдачи кодовой информации системой отдельно и всего комплекса в целом.
Информация бортовых систем 2-10 посредством адаптера вводится в буфер ввода каждого вычислителя. Размер буфера выбирается таким образом, чтобы разместить ограниченную (не менее, чем секундную) реализацию вводимой информации. В буфере ввода каждое слово содержится целиком в совокупности с информацией о времени поступления этого слова на вход блока. Выборка обрабатываемых параметров из буфера ввода и их первичная обработка осуществляется в соответствии с выбранным составом указанных типов параметров. Затем подключается соответствующая процедура в программе обработки, т.е. первый параметр в блоке является кадровой меткой соответствующего блока параметров [6].
УСИ 12 обеспечивает прием и выдачу разовых команд, прием, преобразование, хранение и выдачу в процессор ЭВМ информации, поступающей из систем комплекса в виде последовательных кодов (ПК) с различной частотой (до 100Гц), прием от процессора ЭВМ, хранение, преобразование и выдачу в системы комплекса информации в виде ПК. Передача информации осуществляется с помощью раздельных бифилярных линий связи по принципу "один-одному" или с помощью общих бифилярных линий связи по принципу "один-всем". При этом количество приемников, подключаемых к одному входу передатчика, определяется требуемой циклограммой. Уровни сигналов, структура слов и временные характеристики биполярного трехуровневого ПК по указанному ГОСТу. Способ настройки входных каналов ПК на заданную частоту приема ПК микропрограммный.
Передача сигналов слов и сообщений в общей линии связи магистрали осуществляется в строго определенные интервалы времени по расписанию - режим обмена "программируемое расписание", которое может изменяться с помощью команд, выдаваемых программами систем, имеющих соответствующие уровни приоритета. Начало интервала рассчитывается программным путем от синхрослова систем, имеющих определенные приоритеты на его выдачу. Синхрослова представляют собой стандартные слова с определенными адресами. Информационная часть слова используется для дополнительной информации. Синхрослова выдаются системами один раз в цикл длительностью 0,5 с.
Основной информационный элемент представляет собой цифровое слово, содержащее 32 разряда. Для передачи дискретных команд и сообщений используется кодовое слово (К). Идентификация всех типов слов производится по адресу слова. Адрес слова размещается в разрядах 1-8.
Система единого времени (СЕВ) КБТИ предназначается для формирования шкалы московского (гринвического) времени и обеспечения кодом текущего времени выходной информации. В кадре информации КБТИ время присутствует как параметр. В состав блока приведения данных к единому высокоточному времени (БПДБВВ 11) входят модуль хранения времени-таймер и модуль приема эталонных сигналов времени. В КБТИ источником эталонных сигналов является приемное устройство СНС 2 для приема на борту ЛА сигналов ГЛОНАСС или GPS.
Модуль хранения времени при этом обеспечивает сопряжение с СНС 2 по сигналам синхронизации "1с" кода времени. Сигнал "1с" в СНС 2 представляет собой положительный импульс, который передается через специальный выход. Код времени содержит информацию о текущем времени суток, дате и временной поправке импульса "1" и передается в кадре выходной информации структуре ГОСТ 18977-79.
Информация, вводимая через УСИ 12 имеет временную привязку на уровне каждого вводимого слова - параметр времени, базирующийся на основе таймера. Таймер фиксирует моменты приема информации. Начальное значение параметра времени - нуль. Кроме того, необходима информация (параметр) о системном времени вычислительной системы на момент обработки информации СНС 2, параметр астрономического времени выдачи пачки информации СНС 2, параметр временной задержки выдачи пакета относительного времени определения координат.
Точность привязки по времени обуславливается разрешающей способностью таймера, расположенного в адаптере ввода информации УСИ 12.
Привязка к единому времени действительных значений параметров, измеренных в комплексе и аналогичных параметров, полученных от испытательного оборудования, осуществляется БПДЕВВ 11.
В блоке 11 согласования и синхронизации совмещение по времени параметров во входном потоке производится линейной экстрополяцией:
где
j = 1,...n, n - количество параметров во входном потоке;
bi(j) - текущее значение j-го параметра;
bp(j) - предыдущее значение j-го параметра;
t - текущее время, соответствующее j-му параметру;
tp - значение времени в предыдущий момент;
t - значение времени, в которое должно произойти совмещение информации;
bi(t) -значение переменной на момент расчета.
Переключатель 14 выполнен в виде логического блока с фиксированными приоритетами, первый, второй, третий и четвертый, входы которого соединены соответственно с входами ВДКТПС, вычислителей навигационных параметров СНС-ИНС 16, параметров ближней и дальней навигации 17 и блока управления 25, а выход переключателя 14 соединен с вторым входом вычислителя 17 параметров ближней и дальней навигации, с вторым входом вычислителя декартовых координат 18, третьими входами вычислителей захода на посадку 20, высотно-скоростных параметров 21, вторым входом вычислителя 22 взлетно-посадочных характеристик и входом вычислителя 23 параметров самолетовождения.
В логическом блоке 14 программный оператор определяет передачу управления по одной из логических меток, заданных переключательным списком оператора. Переключатель 14 осуществляет внешнее управление, производимое человеком-оператором, реализованное с помощью клавиатуры.
База данных 19 - централизованная совокупность данных в вычислительной системе, поддержанная системой управления. Вычислительная система реального времени, база данных 19 представляют собой совокупность отношений - записей кортежей или строк. Строка отношения описывает свойства определенного объекта предметной области и может рассматриваться как формальная запись знаний о свойствах этого объекта. Строки одного отношения описывают однородные объекты в предметной области. Отношение - таблица, строками которой являются записи, описывающие конкретные объекты предметной области (аэродромы, их координаты, испытательное оборудование). Управление данными - функции управляющей программы, которые обеспечивают как обращение к наборам данных, так и выполнение соглашений, принятых в системе, регулируют использование устройств ввода-вывода, производят поиск и модификацию данных.
Пульт управления 24 обеспечивает эксплуатационные и предполетные режимы подготовки, проверки и работы КБТИ. Ниже описана входящая в него аппаратура.
Для обеспечения работы инженера-экспериментатора в процессе ЛИ в комплексе реализуется диалоговый режим работы оператора, режимы индикации и индикация результатов анализа выбираются экспериментатором в темпе эксперимента. Для этого информация на дисплей 27 поступает из блока 25 управления через формирователь изображения 26. Графический (координатный) дисплей 27 позволяет наблюдать на экране процесс выполнения режимов, контролировать величины отдельных параметров систем ПНО и ЛА. Дисплей 27 позволяет выводить параметры как функции двух переменных ("параметр по параметру"), что дает возможность корректировать программу полета.
На дисплее 27 строятся графики зависимости погрешностей, накопленных за время полета. Действительные значения параметров используются для изображения на дисплее 27 траектории полета ЛА и ее отклонений от заданной линии пути на всех режимах полета ЛА. Цифро- буквенный дисплей 27 выполнен на основе электронно-лучевой трубки (ЭЛТ) или экрана на жидких кристаллах. С их помощью происходит отображение физических величин регистрируемых и расчетных параметров на дисплее в цифровом, мнемоническом, графическом виде. На дисплее осуществляется оперативное редактирование графических окон, оперативная загрузка форматов отображения информации, совмещение графиков, соответствующих различным временам реализации.
Формирователь 26 изображения предназначается для взаимодействия по мультиплексной линии передачи изображения и формирования сигналов изображения. Он состоит из модуля обмена, графического контроллера модуля дисплейной памяти. Сигналы по мультиплексной шине передачи информации поступают на модуль обмена, который обеспечивает прием и преобразование ее в информационный массив, оценивающий изображение, поступающей в графический контроллер. Графический контроллер по командам модуля обмена формирует цифровые сигналы, сигналы подсвета и другие сигналы управления. Графический контроллер предназначен для приема информации от модуля обмена, расшифровки ее цифровых сигналов управления изображением.
Система документирования 29, построенная на основе мини-ЭВМ, позволяет выполнять следующие операции:
- компоновку документов в виде текстовых таблиц;
- оперативную загрузку форматов документов в реальном времени;
- оперативное изменение исходных данных для формирования документов;
- отладку компоновки документа на дисплее;
- построение на принтере или плоттере графиков с возможностью наложения параметров из разных режимов;
- вывод на принтер графической копии дисплея;
- выборочное копирование - формирование БД - копий, содержащих сопровождающую информацию (комментарии, наименование ЛА, список имен параметров, дата эксперимента (число, месяц, год), N реализации и N эксперимента).
Для работы в режиме "графическое документирование" оператор заранее подготавливает форматы представления выходных документов в виде текстового файла. Файлы форматов находятся в директории файлов. Пользователь заранее готовит форматы представления выходных документов в виде отдельного текстового файла с именем в той же директории.
Блок управления 25, выполненный на основе контроллера,
- осуществляет взаимодействие подсистем;
- выбирает вариант загрузочной конфигурации системы для различных задач регистрации и анализа информации;
- распределяет потоки информации по каналам адаптеров ввода, директории БД и служебных файлов;
- загружает экран отображения информации на дисплее.
Система бортовых измерений 28 предназначена для накопления информации о результатах экспресс-обработки информации в темпе эксперимента с целью последующего (послеполетного) экспресс-анализа. При этом учитывается большой круг решаемых задач и различные требования в зависимости от этапов полета к составу измеряемых параметров, их точности и частотам опроса. Система выполнена на основе миниЭВМ и аппаратуры магнитной записи регистрации цифровых потоков из каналов. Аппаратура содержит блоки и устройства приема, преобразования информации, выборки и прореживания параметров. Блоки включают измерительные преобразователи, цифроаналоговые и аналого-цифровые преобразователи, многоканальные устройства ввода-вывода цифровой информации, платы управления и интерфейса, а также магнитный регистратор с носителем на магнитной ленте, или накопитель на магнитном диске ("винчестер").
КБТИ предполагает присутствие на борту человека-оператора, который анализирует информацию в ходе испытаний, контролирует выполнение режимов полета и работы исследуемых систем, задает тестовые управляющие воздействия. Оператор осуществляет выбор режима работы комплекса, вводит сопровождающую информацию в блоки памяти, редактирует служебные программы, управляет работой комплекса в целом.
Оператор, сидящий за пультом управления КБТИ, ознакомившись с полетным листом, определяет цель проведения ЛИ. Он согласовывает включение КБТИ в соответствии с временем проведения режимов. Далее он запускает с пульта с клавиатуры дисплей и комплекс, проверяет прохождение входных данных. С помощью "меню" выходит на таблицы параметров и масштабные коэффициенты графиков на экране.
Выбор режима анализа производится из "меню" из списка БД, находящихся в директории, используя клавиши управления курсором, выбирается необходимое, после этого будут загружены форматы отображения информации на дисплее. Управление работой на пульте производится нажатием клавиш и их комбинаций.
Литература
1. Методология испытаний пилотажно-навигационных систем самолетов и вертолетов. /Под ред. Новодворского Е.П. и Харина Е.Г. М.: Машиностроение, 1984, с. 80.
2. Аникин А.М., Белкин А.М., Литин А.В. Под ред. Миронова Н.Ф. Воздушная навигация и аэронавигационное обеспечение полетов. М.: Транспорт, 1992, с. 155.
3. Фильтрация и стохастическое управление в динамических системах. / Под ред. Леондеса К.Т. М.: Мир, 1980.
4. Помыкаев И.Н., Селезнев В.П., Дмитроченко Л.А. Навигационные приборы и системы. М.: Машиностроение, 1983, с. 44, 79, 381.
5. Белогородский С.Л. Автоматизация управления посадкой. М.: Транспорт, 1972, с. 51, 65.
6. Ларионов А.М., Горнец Н.Н. Периферийные устройства в вычислительных системах. М.: Высшая школа, 1991, с. 19.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 1996 |
|
RU2134911C1 |
| СИСТЕМА КОМПЛЕКСНОЙ ОБРАБОТКИ ИНФОРМАЦИИ РАДИОНАВИГАЦИОННЫХ И АВТОНОМНЫХ СРЕДСТВ НАВИГАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ДЕЙСТВИТЕЛЬНЫХ ЗНАЧЕНИЙ ПАРАМЕТРОВ САМОЛЕТОВОЖДЕНИЯ | 2012 |
|
RU2487419C1 |
| СИСТЕМА ОЦЕНКИ ТОЧНОСТНЫХ ХАРАКТЕРИСТИК БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2006 |
|
RU2314553C1 |
| УНИФИЦИРОВАННЫЙ НАВИГАЦИОННЫЙ КОМПЛЕКС ЛА | 2015 |
|
RU2590934C1 |
| СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА В ОПАСНЫХ СИТУАЦИЯХ | 1996 |
|
RU2128854C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 2013 |
|
RU2543943C1 |
| ПОЛИЭРГАТИЧЕСКИЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2524508C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2000 |
|
RU2200900C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОНТРОЛЬНЫХ ЗНАЧЕНИЙ ПАРАМЕТРОВ ПРОСТРАНСТВЕННО-УГЛОВОЙ ОРИЕНТАЦИИ САМОЛЁТА НА ТРАССАХ И ПРИАЭРОДРОМНЫХ ЗОНАХ ПРИ ЛЁТНЫХ ИСПЫТАНИЯХ ПИЛОТАЖНО-НАВИГАЦИОННОГО ОБОРУДОВАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2584368C1 |
| МОБИЛЬНАЯ БАЗОВАЯ КОНТРОЛЬНАЯ СТАНЦИЯ ДЛЯ ПОЛУЧЕНИЯ ПАРАМЕТРОВ ТРАЕКТОРНОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И ОЦЕНКИ РАБОТОСПОСОБНОСТИ СИСТЕМ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 2007 |
|
RU2330320C1 |

Изобретение относится к области авиационной техники может быть использовано для исследования характеристик летательных аппаратов на всех участках полета. Цель изобретения - повышение точности определения параметров пространственного положения летательного аппарата. Комплекс содержит спутниковую и инерциальную навигационные системы, устройство сопряжения, пульт управления и индикации, бортовую вычислительную систему анализа и обработки информации, блок приведения данных к единому высокоточному времени и вычислитель действительных координат траектории летательного аппарата. 1 з.п. ф-лы, 5 ил.
| Аникин А.М., Белкин А.М., Литин А.В./Под ред | |||
| Миронова Н.Ф | |||
| Воздушная нав игация и аэронавигационное обеспечение полетов.-М.: Транспорт, 1992, с.155 . |

