Изобретение относится к средствам перемещения и может использоваться для транспортировки сред, грузов и пассажиров в различных средах либо на границе их раздела.
Общеизвестен способ создания силы тяги с помощью движителя - винта. Его недостатком являются значительные потери энергии на турбулентность создаваемого потока (потери на закручивание потока, индуктивные и профильные) и на преобразование вращательного движения движителя в поступательное движение среды и транспортного средства (Энциклопедический словарь. Под редакцией Б. А.Введенского, М., "БСЭ", 1953, т.1, с.307).
Известен универсальный способ перемещения в средах и в вакууме - ракетный (Советский энциклопедический словарь. Под редакцией Г.А.Прохорова, М., "Советская энциклопедия", 1983, с. 1096).
Недостатком ракетного способа перемещения является загрязнение сред и необходимость перемещать дополнительную массу - рабочее тело, истечение которого через сопло обеспечивает движение. Попытки уменьшить дополнительную массу за счет увеличения скорости истечения приводят к значительной неэкономичности - затраты мощности на единицу силы тяги приблизительно равны V/2, где V - скорость истечения. Кроме того, нет возможности осуществить реверс без дополнительных устройств.
Близкими по технической сущности являются способы, использующие поршень и машущее крыло (Советский энциклопедический словарь. Под редакцией Г. А. Прохорова, М., "Советская энциклопедия", 1983, с. 1040).
К недостаткам их реализации относится следующее:
1) обилие механических трущихся частей;
2) узость частотного диапазона работы;
3) отсутствие мгновенного реверса.
Близким по технической сущности является способ создания силы тяги транспортного средства путем сообщения движителю многоцикличного возвратно-поступательного перемещения в направлении линии создания силы тяги - движитель для легкой лодки (патент Франции N 2482552, кл. В 63 H 1/32, 1981).
Недостатки следующие:
1) невозможность работы в газовой среде;
2) наличие подвижных деталей в собственно движителе;
3) невозможность осуществления мгновенного полного реверса, т.е. невозможно достичь максимальной силы тяги, приложенной в противоположном первоначальному движению направлении.
Наиболее близким по технической сущности является способ, используемый в изобретении "Движитель судна" (заявка РФ 93003770/11, М.Кл6, В 63 H 1/32, опубликованная RU БИ N 1 10.01.96). Движителю, представляющему собой мембрану, закрепленную в корме судна, придают различную скорость перемещения в прямом и обратном ходе в направлении, нормальном его поверхности. Тем самым, мембрана испытывает различное сопротивление перемещению в прямом и обратном ходе, и равнодействующая сил сопротивления не равна нулю, создавая тяговое усилие.
Недостатком данного способа является невозможность создания достаточной силы тяги в воздухе в силу ограниченности частотного диапазона работы движителя из-за значительного увеличения времени обратного хода (меньшей скорости обратного хода). Уменьшение до известной степени времени обратного хода за счет придания асимметричности относительно направления перемещения пластины также не позволит создать приемлемый с точки зрения эргономики движитель для работы в воздушной среде из-за значительных затрат мощности на перемещение пластины в обратном ходе.
Целью изобретения является создание универсального для сред способа транспортировки с высокими эксплуатационными характеристиками.
Эта цель достигается тем, что в способе движения транспортных средств движителю, выполненному в виде упругой пластины или оболочки, придают различный режим прямого и обратного хода при одинаковой скорости перемещения, разместив движитель по границе двух сред, одной из которых является среда перемещения транспортного средства, а другой - искусственно созданная среда, например разреженный газ.
Улучшение эксплуатационных характеристик включает следующее:
- повышение КПД;
- повышение маневренности (управляемость);
- универсальность использования для сред.
1. Малые потери связаны
- с меньшим аэро- и гидродинамическим сопротивлением движителя при холостом (обратном) ходе,
- с режимом рабочего (прямого) хода, позволяющим избежать заметного перемещения среды.
2. Способ позволяет
- быстро менять силу тяги, меняя частоту перемещения движителя,
- быстро изменять направление следования транспортного средства, изменяя угол между продольными осями симметрии движителя и транспортного средства,
- осуществить мгновенный полный реверс, изменив режимы прямого и обратного ходов на противоположные.
3. Способ применим в воздушной и в водной среде, используя лишь разный частотный диапазон работы.
Движитель (упругая пластина или оболочка) размещается по границе двух сред, одна из которых является средой перемещения транспортного средства (вода, воздух), а вторая создается искусственно - с другой стороны пластины располагают, например, среду разреженного воздуха. При этом при возвратно-поступательном перемещении пластины с одинаковой скоростью создается различный режим перемещения в прямом и обратном ходах за счет разного сопротивления двух сред, и равнодействующая сил сопротивления не будет равна нулю, так как перемещению пластины в воде (воздухе) препятствует значительно более высокая сила, чем перемещению пластины в разреженном воздухе, и равнодействующая будет совпадать по направлению с перемещением пластины в разреженной среде.
Чтобы получить представление о механизме возникновения силы тяги, рассмотрим вначале возникновение силы тяги при перемещениях пластины в одной среде с различными скоростями прямого и обратного ходов.
Сила тяги при различных режимах прямого и обратного ходов в одной и той же среде перемещения возникает за счет следующих двух эффектов.
1) Нелинейной зависимости сопротивления среды перемещению движителя от его скорости и ее производных - даже для симметрично выполненного движителя (например, круглой пластины, перемещающейся по нормали). За счет различного режима прямого и обратного ходов средняя сила сопротивления не будет равна нулю и может достичь величины, достаточной для осуществления движения. При перемещении движителя в рабочем ходе со скоростью, в 10 раз превышающей скорость холостого хода КПД движителя, т.е. отношение энергии, полезно используемой движителем, к энергии, полученной движителем, может достичь величины, приближающейся к 90%.
2) Несимметричность движителя относительно плоскости, перпендикулярной направлению движения, может приводить к тому, что возникает тяговое усилие даже при совпадении скоростей прямого и обратного ходов. Этот эффект - зависимость лобового сопротивления от формы тела и при ее несимметричности от направления движения - хорошо известен в аэродинамике.
Чтобы показать, как возникает сила тяги, рассмотрим следующие предельные случаи режимов работы движителя в воздухе (с некоторым упрощением и допущением того, что объемная вязкость воздуха тождественно равна нулю):
1) скорости перемещения движителя невелики (много меньше скорости звука в среде), а амплитуды возвратно-поступательного движения достаточно велики для того, чтобы пренебречь эффектами, связанными со сжимаемостью среды. Назовем такой режим "обтекание - обтекание";
2) скорость перемещения движителя в режиме холостого хода (в направлении силы тяги) много меньше скорости звука в среде, амплитуда движения достаточно велика для того, чтобы при расчете холостого хода пренебречь эффектами, связанными со сжимаемостью. Скорость перемещения движителя в режиме рабочего хода (в направлении, противоположном силе тяги) сравнима со скоростью звука в среде, но меньше ее, а амплитуда такова, что основную роль играют эффекты, связанные со сжимаемостью среды. Назовем такой режим "звук - обтекание". Заметим, что этот режим может осуществляться еще и таким образом: движитель совершает несколько "рывков" в направлении, противоположном создаваемой при этом силе тяги. Смещение в каждом из этих "рывков" достаточно, а их скорости достаточно велики, чтобы основную роль сыграли эффекты, связанные со сжимаемостью, т.е. со значительным сопротивлением среды перемещению движителя.
Возможны еще режимы, в которых перемещение движителя в рабочем ходе совершается со сверхзвуковой скоростью (режимы "ударная волна - обтекание", "ударная волна - звук", "ударная волна - ударная волна"). Здесь подробно они рассматриваться не будут, хотя можно отметить, что они могут быть весьма перспективными для воздушных судов.
Оценим силу тяги в режимах "обтекание - обтекание" и "звук - обтекание", возникающую для симметричного движителя (пластина) за счет первого эффекта.
I. "Обтекание - обтекание"
Пусть сопротивление среды нелинейным образом зависит от скорости и описывается формулой
где  - скорость движителя;
- скорость движителя;
α - показатель, характеризующий зависимость силы сопротивления от скорости (α > 0);
k - коэффициент сопротивления.
Примем для простоты, что движитель совершает пилообразные движения: амплитуда - X0, время рабочего хода -τ1, время холостого хода -τ2, (τ2> τ1), а все устройство движется со скоростью υ и по направлению холостого хода. Тогда, средняя за период сила сопротивления (сила тяги) <F> будет равна
и ее направление совпадает с направлением υ - скорости транспортного средства (если <F> > 0) или противоположно ему (если <F> <0).
Полагая υ ≪ Xo/τ1,2, получим в нулевом по υ приближении
<F> ≅ k X
В том же приближении средняя мощность равна
<N> ≅ k X
Важным показателем является отношение <N>/<F> - затраты мощности на единицу силы тяги:
<N>/<F> ≅ Xo(τ
Если перемещение движителя сильно асимметрично (τ1≪ τ2), то
<N>/<F> ≅ Xo/τ1, (6)
то есть, приблизительно равно скорости рабочего хода.
Сравнивая с оценкой V/2 для этой величины при ракетном движении, видно, что перемещение с помощью предлагаемого движителя может быть значительно экономичнее, чем ракетным способом, по крайней мере для больших скоростей истечения рабочего тела из сопла ракеты.
Выбирая для воздуха скорость прямого хода -Xo/τ1 много меньше скорости звука (например, 0,03 мм за микросекунду) и скорость обратного хода еще на порядок ниже (например, 0,003 мм за микросекунду), получим для X0 = 3 мм частотный диапазон работы движителя, простирающийся до 1 кГц. При увеличении X0 частотный диапазон снизится пропорционально. Очевидно, что при работе в режиме "обтекание - обтекание" в воздухе получить силу тяги, достаточную для перемещения реального транспортного средства и приемлемыми с точки зрения эргономики параметрами, верхний частотный предел не позволяет, хотя для воды этот режим вполне приемлем.
Для воды, при грубом допущении, где скорость звука равна 1500 м/с, частотный диапазон работы движителя может простираться до 5 кГц. Учитывая (6), а также значительно большую зависимость возрастания сопротивления от скорости в воде, имеет смысл ограничить частотный диапазон работы движителя в воде сотнями герц за счет уменьшения скорости обратного хода (а, значит, за счет увеличения времени обратного хода). Применив несимметричный относительно плоскости перпендикулярной силе тяги движитель, можно получить еще более экономичное перемещение судна.
II "Звук-обтекание"
Решая волновое уравнение и делая необходимые преобразования, легко находим импульс, получаемый системой за один такт рабочего хода:
Pp= 2SXoρvзв, (7)
где S - площадь движителя (пластины);
X0 - величина перемещения;
ρ - плотность среды;
νзв - скорость звука в среде.
Импульс, получаемый за один такт холостого хода, оценим как
Px= -CdSρX
где Cd - коэффициент увлечения;
τ2 - время холостого хода.
При числах Рейнолдса от 10 до 105 Cd имеет порядок единицы.
Сила тяги в этом режиме равна
F = SρXo[2νзв-SCdXo/τ2]/(τ1+τ2). (9)
Поскольку предполагается Xo/τ2≪ νзв, то в широком диапазоне значений Re для холостого хода основную роль в (9) играет первое слагаемое в скобках, и тогда
F = 2SρνзвXo/(τ1+τ2). (10)
Аналогично, мощность при пилообразном законе перемещения движителя описывается как
N ≅ 2SρνзвX
И затраты мощности на единицу создаваемой силы тяги равны
N/F ≅ Xo/τ1 (12)
скорости рабочего хода.
Применяя движитель в виде упругой пластины с эффективной площадью всего 1 дм2 (0,01 м2), X0 = 0,003 м, τ1= = 10 мкс (V1 = 300 м/с), νзв = 330 м/с, τ2= 100 мкс (V2 = 30 м/с), получим (из 10) силу тяги около 260 H или 26 кгс (килограмм-силы), т. е. полученная подъемная сила даже при таком небольшом движителе уравновесит в среде массу в 26 кг, и движение вполне реально. При этом на поддержание на весу килограмма массы будет затрачено 300 Вт. Увеличив эффективную площадь движителя, например, вдвое, легко увеличить вдвое силу тяги, сохранив удельные затраты мощности или, снизив величину τ1 вдвое, сохранить силу тяги и снизить затраты мощности вдвое же (см. 12).
В режиме работы движителя "звук - обтекание" в воздухе, применяя асимметричный движитель, например выпукло-вогнутую пластину, можно повысить частотный диапазон работы втрое без заметного увеличения потерь на обратный ход в сравнении с симметричным, то есть повысить силу тяги до 80 кгс без существенных дополнительных затрат мощности, так как основное ограничение определится затратами на обратный ход и соответственно ограничением по предельно достижимой скорости реального транспортного средства.
Иное дело, если использовать движитель, где упругая пластина расположена по границе "воздух - разреженный воздух". В этом случае скорость обратного хода будет равна скорости прямого хода, и частотный диапазон будет распространяться в ультразвуковую область - до 50 кГц, а сила тяги (подъемная сила) составит 120 кгс при затратах мощности около 36 кВт. Это уже реальное индивидуальное средство перемещения человека в воздухе, причем более экономичное, чем вертолет.
Ограничения по предельно достижимой скорости воздушным судном будут определяться параметрами конкретной конструкции транспортного средства, на котором установлен этот тип движителя.
Приведенные оценки довольно грубы, однако, они позволяют составить представление о величине силы тяги и характере ее зависимости от параметров движителя и режимов работы.
Для водного судна можно получить различный режим прямого и обратного ходов, расположив плоскость движителя на границе двух сред, например, вода - воздух. Это позволит получить силу тяги даже при одинаковой скорости прямого и обратного ходов, так как сопротивление перемещению движителя в воде значительно превышает сопротивление в воздухе при одинаковых скоростях перемещения. При этом затраты на обратный (холостой) ход весьма малы в сравнении с затратами на рабочий ход. Примером осуществления такого способа может быть использование погруженной части кормы водоизмещающего судна в качестве движителя (упругая пластина). В этом случае движитель располагается по границе воды и воздуха в трюме. При рабочем ходе движителю будет противодействовать вода, при холостом ходе - трюмный воздух, в упрощенном рассмотрении. При равных временах перемещения движителя в прямом и обратном ходе частотный диапазон может простираться до единиц МГц, учитывая значительное снижение X0 и отталкивание упругой пластины от массы воды, как от твердого тела.
Для работы движителя в воздухе необходимо разместить его по границе "воздух - разреженный воздух". Кстати, размещение движителя по границе "вода - разреженный воздух" позволит еще значительней снизить потери холостого хода, уменьшить площадь пластины и увеличить частотный диапазон.
При использовании возможности, предоставляемой перемещением движителя при обратном ходе в разреженном воздухе, можно конструировать транспортное средство, способное перемещаться и в воде, и в воздухе, что достижимо было пока только для ракетного способа перемещения.
Известно плавающее устройство (Европейская заявка ЕР 0523787, опубликованная 20.01.93, кл. В 63 В 35/83; В 63 H 01/32). В этом устройстве движителю придается возвратно-поступательное перемещение ногами человека. При этом движитель становится резко асимметричным относительно плоскости, перпендикулярной направлению перемещения, так, что в режиме прямого хода он обладает максимальным сопротивлением при перемещении в воде, а в режиме обратного хода - минимальным.
Недостатки устройства следующие:
1) невозможность работы в газовой среде;
2) невозможность мгновенного реверса.
Наиболее близким по технической сущности к предлагаемому устройству является движитель судна (заявка РФ 93003770/11 М.Кл.6 В 63 H 1/32, опубликованная RU БИ N 1 10.01.96). Движитель содержит мембрану, упор в корпусе судна и блок пьезоэлементов, закрепленный между упором и мембраной, а также источник пилообразных напряжений с крутым передним и пологим задним фронтами.
Недостатком данного устройства является невозможность создания достаточной силы тяги в воздухе в силу ограниченности частотного диапазона из-за наличия пологого заднего фронта. Укорочение до известных пределов заднего фронта (уменьшение времени обратного хода) за счет придания асимметричности относительно направления перемещения пластины также не позволит создать приемлемый с точки зрения эргономики движитель для работы в воздушной среде, из-за значительных затрат мощности на перемещение пластины в обратном ходе.
Задачей предлагаемого изобретения является создание универсального движителя, который может работать как в воде, так и в воздухе с высокими эксплуатационными характеристиками.
Поставленная задача осуществляется тем, что в предлагаемом изобретении устройство содержит герметичный кожух с разреженным воздухом, одна стенка которого выполнена из упругой пластины или оболочки, нормально расположенной к направлению силы тяги, блок пьезоэлементов, закрепленный между упругой пластиной и упором внутри кожуха, и источник электрических колебаний, вырабатывающий электрические импульсы с крутым передним и задним фронтами. Устройство может быть выполнено с движителем в виде выпукло-вогнутой оболочки. Устройство может быть выполнено также в виде кожуха, исполняющего роль упора, в котором заключен блок пьезоэлементов, и пластина (оболочка) герметично встроена в кожух в качестве одной из его сторон. При использовании движителей на универсальном транспортном средстве, их располагают на поверхности транспортного средства попарно под углом 40 -120o.
В сравнении с прототипом предлагаемое изобретение позволяет следующее.
1. Расширить частотный диапазон, а следовательно, и управляемость водного судна (например, большое начальное ускорение).
2. Использовать предлагаемый движитель не только на водоизмещающем судне, но и на глиссирующем, так как движитель можно опустить ниже кормы. В прототипе корма является частью движителя.
3. Повысить управляемость судна за счет изменения направления силы тяги, используя поворотное крепление движителя к судну. В прототипе, где движителем является подводная часть кормы, изменение курса судна предусматривается рулями за счет отбоя струи, то есть достаточно инерционно и связано с торможением судна.
4. Осуществить мгновенный реверс путем изменения полярности электрических импульсов, для чего применяют упругую пластину (или оболочку), которую можно выполнить с выпукло-вогнутой поверхностями, причем выпуклость направлена в сторону силы тяги, и вогнутую поверхность выполнить в виде смачивающей. Такая поверхность увеличит сцепление с водой и позволит сохранить звуковой диапазон работы без "отрыва" от граничного слоя воды при включении реверса.
5. Создать судно для перемещения как в воде, так и в воздухе.
Способ движения транспортного средства осуществляется следующим образом: движитель (упругая пластина или оболочка), герметично встроенный в кожух, размещается по границе двух сред, одна из которых является средой перемещения транспортного средства (вода, воздух), а вторая создается искусственно - в кожухе с другой стороны пластины откачивают воздух. Пластина своей кромкой герметично встроена в кожух, ниже кромки может быть расположен гофр для снижения жесткости пластины, и пластина жестко связана с блоком пьезоэлементов, опирающихся противоположной стороной на упор на кожухе. При подаче электрических импульсов на блок пьезоэлементов они будут синхронно расширяться и возвращаться в начальное состояние, передавая возвратно-поступательные перемещения пластине. При этом при возвратно-поступательном перемещении пластины с одинаковой скоростью создается различный режим перемещения в прямом и обратном ходах за счет разного сопротивления двух сред, и равнодействующая сил сопротивления не будет равна нулю, т.к. перемещению пластины в воде (воздухе) препятствует значительно более высокая сила, чем перемещению пластины в разреженном воздухе, и равнодействующая будет совпадать по направлению с перемещением пластины в разреженной среде. Вибрирующая пластина (вибрация - колебание упругого тела) передает через упор на кожух и далее на транспортное средство импульсы силы, определяемые сопротивлением среды (минус сопротивление разреженного газа в обратном ходе). Отсюда - название движителя "Вибролет".
На фиг. 1 схематически показано предлагаемое устройство с использованием искусственной среды (например, разреженного воздуха).
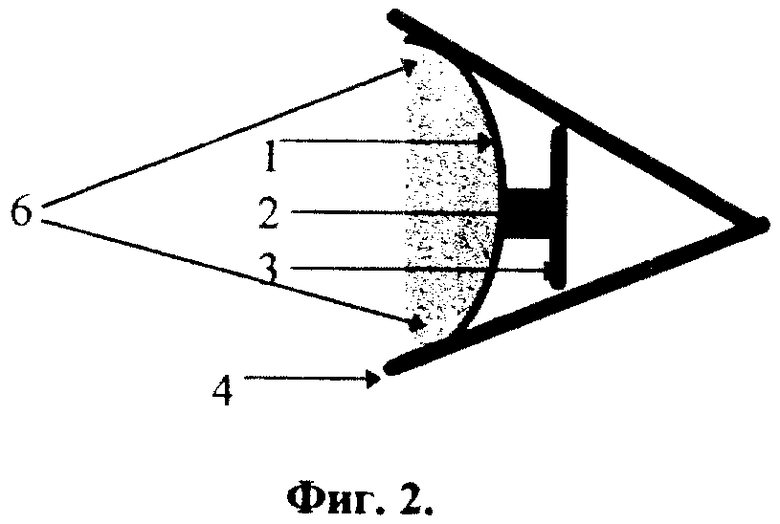
На фиг. 2 показан вариант предлагаемого устройства с использованием выпукло-вогнутой оболочки в качестве движителя.
На фиг. 3 приведен вариант предлагаемого устройства, в котором вся эффективная при обратном ходе поверхность движителя жестко связана с "активной средой" - блоком пьезоэлементов.
На фиг. 4 приведено схематическое расположение движителей на универсальном (для воды и воздуха) транспортном средстве - эллипсоиде вращения.
Устройство (фиг. 1) состоит из упругой пластины 1, блока пьезоэлементов 2, закрепленного между упругой пластиной и упором 3, расположенных в герметичном кожухе 4 (выполненный, например, в виде конической поверхности), в котором находится разреженный газ 5, и источника электрических колебаний (не показан). Источник электрических колебаний выполнен в виде генератора электрических импульсов с крутым передним и задним фронтами и подключен к блоку пьезоэлементов. Упор жестко связан с кожухом. Кожух может шарнирно крепиться к корпусу транспортного средства.
В устройстве в качестве силовых средств могут быть использованы, например, электронные усилители мощности, нагруженные на магнитную исполнительную систему (или блок пьезоэлементов), взаимодействующую через привод или непосредственно (в случае использования пьезоэлементов) с упругой пластиной или оболочкой, и управляемый генератор импульсов. При использовании автономного источника питания это позволит создать малогабаритное индивидуальное средство перемещения с размещением движителей на ногах или платформе, на которой размещается пассажир.
На фиг. 2 приведен вариант устройства, в котором движитель выполнен в виде выпукло-вогнутой оболочки 1, причем выпуклость направлена в сторону силы тяги, и между ней и упором 3 жестко прикреплен блок пьезоэлементов 2. Внешняя среда (среда перемещения транспортного средства) 6 находится со стороны вогнутой поверхности.
На фиг. 3 приведен еще один вариант устройства, в котором в качестве упора 3 используется кожух, а пластина 1 всей эффективной поверхностью внутренней стороны жестко прилегает к блоку пьезоэлементов 2. В этом случае нет необходимости заполнять кожух искусственной средой - разреженным газом, так как пластина объединена с поверхностью пьезоэлементов и при холостом ходе ей не препятствует среда перемещения. Средой перемещения в холостом ходе как бы является активная поверхность, т.е. искусственная <среда> пьезоэлементов.
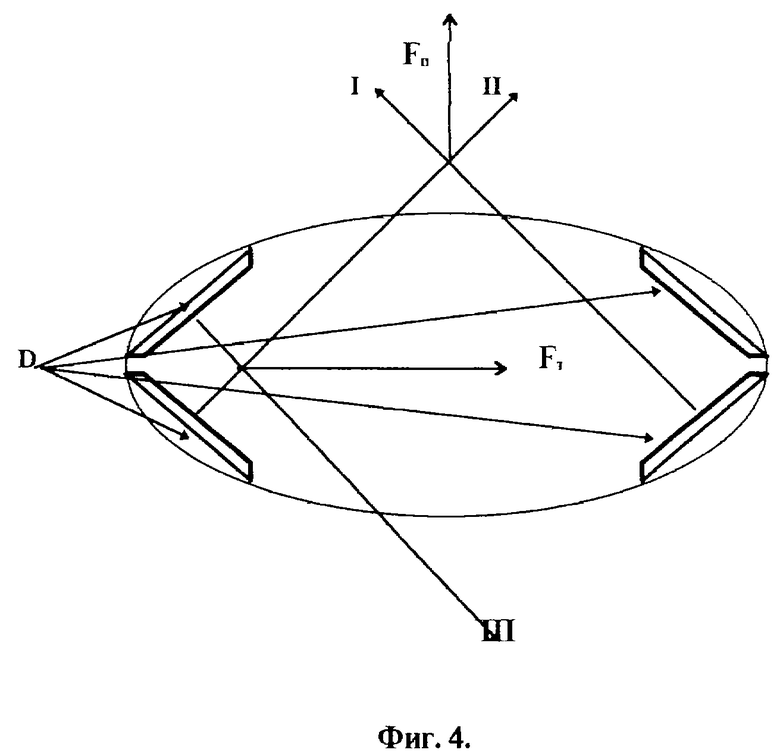
На фиг. 4 приведен пример схематического расположения движителей на универсальном транспортном средстве, представляющем собой, например, эллипсоид вращения. На этой фигуре I, II, III - силы, создаваемые соответствующими движителями D; Fт - сила тяги, создаваемая движителями II - III; Fп - подъемная сила, создаваемая движителями I - II.
При использовании предлагаемого изобретения "Вибролет" (фиг. 4. ) в транспортном средстве универсального назначения следует применять более одного движителя, чтобы обеспечить подъемную силу в воздухе. В этом случае располагают движители D на таком транспортном средстве попарно под углом 40 - 120o друг к другу. При расположении движителей под углом менее 40o, как видно из фиг. 4, составляющая силы тяги значительно уменьшится; при расположении движителей под углом больше 120o значительно уменьшится подъемная тяга. Наиболее применимым расположением движителей будет угол 90o, однако, оптимальный угол выбирается исходя из назначения транспортного средства (скоростное оно, грузовое, или с повышенной маневренностью и т.п.).
Предлагаемое устройство работает следующим образом.
Импульсы от генератора подаются на блок пьезоэлементов, заставляя его периодически расширяться и возвращаться в первоначальное состояние. Расширение блока заставляет пластину перемещаться в сторону, противоположную направлению силы тяги (рабочий или прямой ход). Перемещению пластины противодействует сила сопротивления среды перемещения (вода, воздух) и импульс силы через упор передается транспортному средству. По заднему фронту электрического импульса от генератора блок пьезоэлементов возвращается в первоначальное состояние, возвращая пластину назад (холостой или обратный ход). При этом перемещении пластины ей противодействует среда разреженного газа, так как пластина в обратном ходе перемещается в разреженном воздухе, заключенном в кожухе. Импульс этой силы сопротивления значительно меньше первоначального импульса и направлен в противоположную ему сторону, несколько уменьшая воздействие первоначального импульса на транспортное средство.
При использовании движителя в виде выпукло-вогнутой пластины или оболочки (выпуклость обращена в сторону тяги) сопротивление перемещению движителя в прямом ходе значительно превышает сопротивление среды в обратном ходе в силу лучшего обтекания поверхности движителя и более разреженной среды внутри кожуха.
Если же пластина всей эффективной поверхностью жестко связана с поверхностью пьезоэлементов, то средой перемещения пластины в холостом ходе является поверхность пьезоэлементов или "активная среда", которая не только не оказывает противодействия перемещению, но осуществляет перемещение движителя.
Из формулы (10) видно, что сила тяги пропорционально зависит от частоты перемещения движителя. Предельная частота определяется крутизной обоих фронтов - заднего и переднего. "Вибролет" позволяет получить максимально возможную частоту (а, значит, и силу тяги), так как задний фронт управляющего импульса такой же крутой, как и передний, и частота определится как f = 1/2τ, где τ - время хода упругой пластины.
Как показано выше, ограничения по частотному диапазону для предлагаемого движителя находятся за пределами возможностей технической реализации. Практически, в качестве ограничения будет выступать только ограничение по затратам мощности на создаваемую силу тяги.
Предлагаемый способ и устройство можно использовать не только для водных и воздушных транспортных средств, разместив движитель под крыльями или под фюзеляжем, корпусом судна, но и для движения наземных транспортных средств, например автомобиля, железнодорожного транспорта. В этом случае колеса наземного транспорта служат для уменьшения трения и не связаны с двигателем. Это способствует значительному уменьшению длины тормозного хода, так как движитель позволяет осуществить практически мгновенно полный реверс, т.е. мгновенно изменить направление создаваемой силы тяги на противоположное. При одновременном торможении колес тормозным устройством это приведет к значительному уменьшению длины тормозного хода.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕАКТИВНЫЙ ДВИЖИТЕЛЬ | 1999 |
|
RU2152332C1 |
| СПОСОБ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО "РЫБИЙ ХВОСТ" ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2109655C1 |
| РЕАКТИВНЫЙ ДВИЖИТЕЛЬ | 1997 |
|
RU2122506C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ "МЕТАРАДАР" И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2263934C1 |
| СПОСОБ "МЕТАСВЯЗЬ" ЭФИРНОЙ ПЕРЕДАЧИ-ПРИЕМА ИНФОРМАЦИИ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2234190C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ И УСТРОЙСТВО "ДИФФЕРЕНЦИАЛЬНЫЙ РАДАР" ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2148842C1 |
| ПЛАВНИКОВЫЙ ДВИЖИТЕЛЬ | 1990 |
|
RU2025405C1 |
| Способ движения на "водной подушке" и глиссирующее судно для его осуществления | 2015 |
|
RU2615031C2 |
| КОЛЬЦЕВОЙ СТАТИЧЕСКИЙ ВЕТРО- И ВОДОДВИЖИТЕЛЬ И УСТРОЙСТВО ВЕТРОЛЕТА, ВОДОЛЕТА И ВОДОХОДА | 1994 |
|
RU2110439C1 |
| ПЛАВНИКОВЫЙ ЛОПАСТНОЙ ДВИЖИТЕЛЬ ДЛЯ ПЛАВСРЕДСТВ НАДВОДНОГО И ПОДВОДНОГО ПЛАВАНИЯ (ВАРИАНТЫ) | 2016 |
|
RU2622519C1 |

Изобретение касается реализации средств перемещения и предназначено для использования при осуществлении транспортировки грузов и пассажиров в различных средах либо на границе их раздела. В данном способе движителю, выполненному в виде упругой пластины либо оболочки, при возвратно-поступательном перемещении с одинаковой скоростью прямого и обратного ходов придают различный режим прямого и обратного ходов, разместив его на границе двух сред. Одна из сред является средой перемещения транспортного средства, а другая искусственно созданной - разреженным газом или активной средой. Движитель состоит из кожуха с разреженным газом, герметично встроенной в него в качестве одной из сторон упругой пластины или оболочки, блока пьезоэлементов, размещенного между пластиной и упором, жестко соединенным с кожухом, и генератора электрических импульсов. При построении транспортного средства движители могут быть расположены на его поверхности попарно под углом 40-120o друг к другу. Предложенное техническое решение характеризуется универсальностью и обеспечивает высокие эксплуатационные характеристики, в частности мгновенный полный реверс. 3 с. и 2 з. п. ф-лы, 4 ил.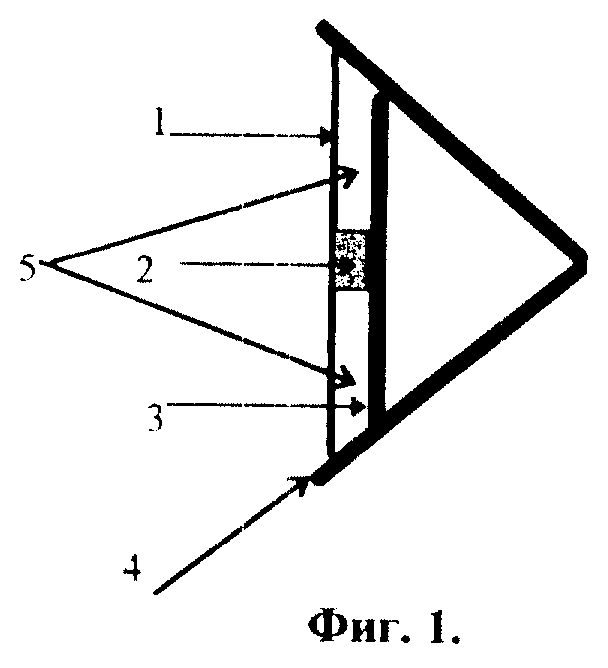
| RU 93003770/11 А, 10.01.1996 | |||
| САМОНАПОРНАЯ СИСТЕМА ВНУТРИПОЧВЕННОГО ОРОШЕНИЯ, АЭРАЦИИ И ОБОГРЕВА АКТИВНОГО СЛОЯ ПОЧВЫ В ГОРНО-ПРЕДГОРНОЙ ЗОНЕ | 2008 |
|
RU2366162C1 |
| Средство для лечения женского бесплодия и бесплодия самок животных | 2017 |
|
RU2740922C2 |

