Изобретение относится к воздушным, подводным и надводным водоизмещающим транспортно-производственным средствам передвижения и производства и может использоваться для снижения общего сопротивления ветродвижителя с винтом в аэродинамической трубе по [1].
Известен статический ветродвижитель - мягкий или твердый парус водного транспортного средства или сухопутного - буера, в котором для создания тяги используется аэродинамическая "подъемная сила" паруса [2].
Общим, самым большим, но далеко не единственным недостатком всех парусных движителей является невозможность обеспечения движения транспортного средства не только прямо против ветра - курс "левентик", но и под углом более острым, чем "крутой бейдевинд". При замене паруса ветродвигателем, работающим на водяной винт-движитель по [1], этот недостаток парусного движителя устраняется.
Известно кольцо-насадка водяного гребного винта, представляющее тело вращения в виде усеченного конуса, расположенного большим основанием к носу судна и образованного вращением плоско-выпуклого аэродинамического профиля крыла выпуклой стороной внутрь кольца и охватывающего с некоторым зазором водяной винт.
При обтекании такой насадки встречным потоком воды осевая составляющая гидродинамической "подъемной силы" кольцевого профиля существенно увеличивает упор гребного винта, так как направлена по движению судна и намного превышает силу сопротивления собственно кольца-насадки [3].
Наиболее близким аналогом предлагаемого ветро- и вододвижителя является применявшееся в 30-е годы на самолетах в качестве обтекателя цилиндров поршневого двигателя воздушного охлаждения так называемое "кольцо Тоуненда", которое представляет собой слегка конусное кольцо с поперечным сечением в виде аэродинамического плоско-выпуклого профиля, выпуклой стороной наружу кольца и закрепленного в передней закругленной части фюзеляжа с некоторым зазором от его наружной поверхности [4].
При обтекании такого кольца встречным потоком воздуха осевая составляющая аэродинамической "подъемной силы" профиля совпадает с направлением движения самолета, что приводит к снижению его общего сопротивления. Применение обтекателя в виде "кольца Тоуненда" давало уменьшение сопротивления фюзеляжа самолета с поршневым двигателем воздушного охлаждения на 25 - 60% и более.
К сожалению, с переходом в авиации на двигатели жидкостного охлаждения и газотурбинные "кольцо Тоуненда" было забыто и его применение не получило должного развития.
Задача изобретения - повышение эффективности использования аэро- и гидродинамической "подъемной силы" замкнутых конусно-кольцевых профилей для создания тяги.
Изобретение поясняется фиг. 1, а - г.
В потоке, невозмущенное направление и скорость которого обозначены стрелкой V, находится кольцо 1 в виде усеченного конуса, образованного вращением плоско-выпуклого аэродинамического профиля 2. Набегающий поток будет плавно без отрыва обтекать только наружную поверхность такого кольца (фиг. 1, а). При большом угле β наклона хорды профиля к направлению скорости невозмущенного потока (отрицательный угол атаки), произойдет отрыв потока от внутренней поверхности кольца, приводящий к уменьшению давления и образованию системы вихрей. Полная аэродинамическая сила Q элемента профиля кольца в этом случае будет направлена внутрь кольца, а ее осевая составляющая X - по направлению скорости V потока, т.е. будет сопротивлением для движения кольца против потока.
Если обеспечить принудительное формирование направления и скорости потока, обеспечивающее безотрывное и с нужным углом атаки α обтекание внутренней поверхности кольца, как показано на фиг. 1, б, то полная аэродинамическая сила Q будет направлена уже наружу кольца, а ее осевая составляющая T - навстречу направлению скорости потока, т.е. будет тягой для такого режима работы кольца. Такое формирование потока, полностью отвечающее указанным требованиям, возможно, например, с помощью хорошо обтекаемого тела, показанного на фиг. 1в, путем размещения его головной части внутри конусного кольца с некоторым зазором от ее внутренней поверхности (фиг. 1, г). Близкую к форме такого тела может иметь, например, корпус воздушного транспортного средства-дирижабля или корпус подводного судна, а форму головной части такого тела имеют практически все подводные носовые бульбы водоизмещающих судов, которые и можно рассматривать в качестве наиболее близких аналогов предлагаемых вертолета, водолета и водохода соответственно.
Для крыла как устройства, основное назначение которого создание подъемной силы, сила сопротивления складывается из двух составляющих: Xp - профильного сопротивления и Xi - индуктивного сопротивления крыла, природа которого заключается в следующем. В результате сложения поля скоростей так называемых "концевых вихревых жгутов", сбегающих с концевых сечений крыла, с полями скоростей "присоединенного вихря" и набегающего потока происходит отклонение на некоторый угол скоса как набегающего на крыло потока, так и подъемной силы назад на тот же угол, появляющаяся осевая составляющая которой, пропорциональная квадрату величины подъемной силы, и является индуктивным сопротивлением Xi. С увеличением удлинения крыла Xi уменьшается и для крыла бесконечно большого удлинения Xi = 0.
Кольцевое "крыло" (фиг. 1а, б) по сравнению с обычным линейным крылом обладает некоторыми особенностями, имеющими для выполнения задачи изобретения принципиальное значение:
1. Кольцевое "крыло" не имеет концевых сечений, поэтому у него нет и концевых вихревых жгутов, а значит его индуктивное сопротивление Xi = 0. В этом смысле оно эквивалентно линейному крылу бесконечно большого удлинения, величина сопротивления которого не зависит от величины коэффициента Cy - подъемной силы крыла, что дает возможность применять аэродинамические профили и выбирать режим их использования с большими значениями Cy. Сопротивление такого кольца будет состоять только из профильного сопротивления и иметь поэтому минимально возможную величину, а коэффициент качества  будет максимальным и равным коэффициенту качества примененного профиля (K = KP ≥ 65) вплоть до углов атаки, близких к критическим.
будет максимальным и равным коэффициенту качества примененного профиля (K = KP ≥ 65) вплоть до углов атаки, близких к критическим.
2. Результирующая проекция полной аэродинамической силы конусного профильного кольца на ось конуса при безотрывном обтекании его осевым потоком, как было отмечено, дает силу тяги T, совпадающую с направлением движения конусного кольца, а результирующая проекции полной аэродинамической силы на любую ось, перпендикулярная оси конуса, - подъемная сила - всегда будет равна нулю, так как суммарная подъемная сила любой половины кольца на тканую ось полностью уравновешивается такой же величиной суммарной подъемной силы другой половины кольца. При повороте оси конусного кольца на некоторый угол по отношению направления скорости невозмущенного потока или нарушении симметрии обтекания конусного кольца появляется неуравновешенная проекция подъемной силы, момент которой по отношению центра масс устройства будет разворачивать устройство вокруг одной из осей, перпендикулярных направлению скорости потока, что может использоваться для управления движением устройства.
Как следует из фиг. 1, б, составляющая полной аэродинамической силы Q на направление скорости потока сила тяги T будет равна ,
,
здесь CQ≅ Cy - коэффициент полной аэродинамической и подъемной силы;
S = π•b•(r+R) - площадь конусной поверхности кольца;
ρ кг (с) с2/м4 - плотность среды;
для воздуха ρ = 0,125 кг (с) с2/м4;
для воды ρ = (102 - 104) кг (с)2/м4;
V м/с - скорость набегающего потока;
α - угол атаки профиля по отношению обтекающего профиль потока;
β - угол наклона хорды профиля к направлению скорости невозмущенного потока.
Сила сопротивления X тела (фиг. 1, в) при обтекании его осевым потоком (Y = 0) в определенном диапазоне скоростей набегающего потока будет равна ,
,
здесь Cx - коэффициент сопротивления тела (фиг. 1, в), величину которого можно принять Cx = 0,2;
Fк= π•R2 м2 - площадь наибольшего поперечного сечения (миделя).
Корпус реального устройства в отличии от тела (фиг. 1,в) "обрастает" многими необходимыми элементами: он должен иметь грузопассажирскую кабину, вспомогательный движитель, стабилизирующие, а в каких-то случаях и несущие плоскости и другие элементы, создающие дополнительное сопротивление. Коэффициент сопротивления хорошо спроектированного и изготовленного корпуса устройства может быть равен 
Отношение силы тяги T кольца к силе сопротивления XΣ корпуса устройства - относительная тяга движителя δ без учета возможного взаимовлияния, т.е. как простой итог, будет равна ,
,
здесь  - относительные величины b, r, R.
- относительные величины b, r, R.
Значение  не зависит ни от плотности среды ρ , ни от скорости потока V.
не зависит ни от плотности среды ρ , ни от скорости потока V.
Если величина отношения  будет равна:
будет равна:
δ < 1 - сила тяги кольца меньше силы сопротивления движению корпуса устройства;
δ = 1 - сила тяги кольца равна силе сопротивления движению корпуса устройства;
δ > 1 - сила тяги кольца больше силы сопротивления корпуса устройства - режим отрицательного сопротивления.
Теперь определим требуемую величину Cy профиля кольца, обеспечивающую работу устройства в режиме отрицательного сопротивления.
Из выражения для  найдем
найдем .
.
Определим величину C для следующих, вполне реальных значениях параметров: 

 .
.
Требуемую для обеспечения режима отрицательного сопротивления величину Cy может иметь многощелевой или составной аэродинамический профиль.
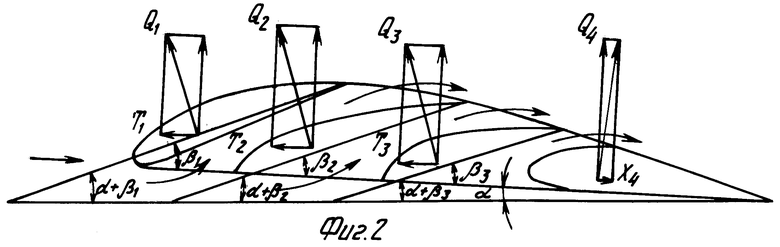
В отсутствии общепринятого автор дает свое определение понятия составного профиля: "Составной широкощелевой профиль образован составляющими его профилями, расположенными на некоторых расстояниях друг за другом, при этом верхняя часть первого составляющего профиля образована верхней поверхностью головной части составного профиля, а большая часть обеих поверхностей последнего профиля образована обеими поверхностями концевой части составного профиля. Хорды всех составляющих профилей, кроме последнего, наклонены к хорде составного профиля (фиг. 2). Каждый последующий профиль формирует безотрывное и с требуемым углом атаки обтекание набегающим потоком каждого предыдущего профиля. Все это позволяет рассматривать характеристики не только основного составного профиля как многощелевого, но и в какой-то мере характеристики каждого составляющего профиля как самостоятельного. Для улучшения характеристик составляющих профилей некоторые из них или даже все могут быть выполнены щелевыми. Полная подъемная сила основного профиля должна быть увеличена на нормальную составляющую подъемной силы всех составляющих профилей, а составляющие подъемной силы на направление движения в силу значительного наклона хорд всех профилей (кроме последнего) должны существенно снизить силу сопротивления составного профиля".
По мнению автора, такой составной профиль должен иметь большое значение Cу = 3 - 3,5 и более на малых углах атаки - менее 8o, пониженную величину Cxp и более высокий коэффициент качества профиля  , чем обычный многощелевой.
, чем обычный многощелевой.
Если режим отрицательного сопротивления вообще возможен, а у автора нет оснований сомневаться в этом, то можно сделать очень интересные и далеко идущие выводы:
1. Пока сохраняются приведенные выше закономерности изменения величины силы тяги и сопротивления от плотности среды ρ и скорости потока V - режим автомодельности - движение устройства будет происходить с ускорением, вплоть до так называемой "критической скорости"  (здесь a = 340 м/с - скорость звука), при которой хотя бы на части поверхности кольца или корпуса произойдет смена режима, приводящая к уменьшению тяги кольца или увеличению сопротивления корпуса и кольца, или к тому и другому одновременно. Увеличение местной скорости потока, обтекающего какие-либо элементы кольцевого профиля и корпуса устройства до скорости звука и более приводит к появлению скачков давления и увеличению коэффициентов Cx профиля кольца и корпуса за счет появления волнового сопротивления, что и будет ограничивать дальнейшее увеличение скорости устройства. Значение "критической скорости" невозмущенного потока (скорости полета относительно воздуха), соответствующей началу такого процесса, будет в пределах Mk = 0,55 - 0,75 (673 - 918 км/ч). Скоростной напор встречного потока при таких скоростях полета составит 2000 - 4000 кг(с)/м2 и обеспечение сохранения прочности и устойчивости формы корпуса летательного аппарата легче воздуха будет представлять сложную техническую задачу.
(здесь a = 340 м/с - скорость звука), при которой хотя бы на части поверхности кольца или корпуса произойдет смена режима, приводящая к уменьшению тяги кольца или увеличению сопротивления корпуса и кольца, или к тому и другому одновременно. Увеличение местной скорости потока, обтекающего какие-либо элементы кольцевого профиля и корпуса устройства до скорости звука и более приводит к появлению скачков давления и увеличению коэффициентов Cx профиля кольца и корпуса за счет появления волнового сопротивления, что и будет ограничивать дальнейшее увеличение скорости устройства. Значение "критической скорости" невозмущенного потока (скорости полета относительно воздуха), соответствующей началу такого процесса, будет в пределах Mk = 0,55 - 0,75 (673 - 918 км/ч). Скоростной напор встречного потока при таких скоростях полета составит 2000 - 4000 кг(с)/м2 и обеспечение сохранения прочности и устойчивости формы корпуса летательного аппарата легче воздуха будет представлять сложную техническую задачу.
Для обеспечения возможности уменьшения скорости и движения на более низких, чем предельная, скоростях V<Vmax аппарат должен иметь устройство уменьшения общей силы тяги движителя, например, за счет изменения величины зазора между внутренней поверхностью кольца и корпусом или увеличения общего сопротивления корпуса, например за счет применения тормозных щитков либо иных устройств, или обеих устройств на одном аппарате.
2. Режим автомодельности ограничен физическим пределом не только по максимальной скорости, но и минимальной скоростью набегающего потока, для которой величина т.н. "числа Рейнольдса"  будет равна Re≥106
будет равна Re≥106 ,
,
отсюда ,
,
здесь dminm - характеристический линейный размер, за который принят наименьший диаметр конусного кольца;
ν = 1,45•10 м2/с - кинематическая вязкость воздуха для нормальных условий.
Как следует из приведенной выше зависимости, наименьшая скорость начала автомодельного режима не более Vmin = 3,33 м/с = 12 км/ч.
Для разгона устройства до минимальной скорости начала автомодельного режима аппарат должен иметь с приводом от двигателя независимый движитель, например, свободный воздушный винт или винт в нерегулируемом или регулируемом кольце. Минимальная мощность Nmin кВт, отдаваемая таким движителем потоку, будет равна ,
,
а для устройства с  ; Rk = 7,5 м; Vmin = 3,33 м/с составит
; Rk = 7,5 м; Vmin = 3,33 м/с составит
3. Даже небольшое превышение величины относительной тяги устройства на близких к предельным скоростям полета дает очень большую избыточную мощность движителя устройства. Величина избыточной мощности кВт на скорости полета м/с будет равна
Для того же условного устройства на скорости полета = 180 м/с (648 км/ч и величины = 0,01) избыточная мощность будет равна
При этом можно найти полезное промышленное применение в полете какой-то части избыточной мощности, если "ввести" ее внутрь устройства.
Об одном из возможных полезных промышленных применений избыточной мощности и способе введения ее внутрь устройства будет приведено ниже.
Приведенное отношение  , как было отмечено, представляет собой простой итог общего эффекта обтекания потоком корпуса и охватывающего его головную часть конусного аэродинамического кольца без учета возможного взаимовлияния их на определяющие характеристики обеих элементов. Реальный итог такой комбинации может быть как много хуже, так и лучше простого итога.
, как было отмечено, представляет собой простой итог общего эффекта обтекания потоком корпуса и охватывающего его головную часть конусного аэродинамического кольца без учета возможного взаимовлияния их на определяющие характеристики обеих элементов. Реальный итог такой комбинации может быть как много хуже, так и лучше простого итога.
Действительно, при очень малых зазорах между кольцом и корпусом подъемная сила (следовательно, и тяга кольца) может быть близкой или даже равной нулю, а при очень больших зазорах, при которых не происходит формирования безотрывного обтекания внутренней поверхности кольца, подъемная сила, как было отмечено, будет направлена внутрь кольца и будет увеличивать сопротивление корпуса.
С другой стороны, поверхность головной части корпуса по отношению к кольцу является своеобразным движущимся экраном, взаимодействие которого с кольцом при оптимальных зазорах приводит к некоторому снижению сопротивления из-за появления так называемой "подсасывающей силы" за счет возникновения дополнительного разрежения вблизи передней кромки профиля. Общее разрежение перед головной частью корпуса должно несколько уменьшить и Cx. Кроме того, сила тяги T кольца должна иметь максимум при определенных оптимальных соотношениях, входящих в T-параметров:  и (α+β) и определенной форме головной части корпуса.
и (α+β) и определенной форме головной части корпуса.
Поиск оптимальной формы и соотношений параметров для такой сложной задачи возможен только экспериментально при продувках моделей головной части или всего устройства в аэродинамической трубе.
Сопротивление движению X подводного судна складывается из сопротивления трения Xт корпуса о воду, величина которого может достигать 75% полного сопротивления, вихревого или сопротивления формы Xф, которое на обычных подводных скоростях до 10 узлов составляет менее 4 - 6% полного сопротивления и сопротивления выступающих частей Xв.ч., состоящее в свою очередь из сопротивления трения и формы выступающих частей и составляющее до 50% сопротивления "голого" корпуса.
При плавании в подводном положении на значительной глубине волновое сопротивление отсутствует.
Сопротивление трению Xт кг(с) определяется по выражению
X = (ζт+Δζк+Δζш),
здесь  - коэффициент сопротивления трению технически гладкой пластины при турбулентном обтекании;
- коэффициент сопротивления трению технически гладкой пластины при турбулентном обтекании;
Δζк и Δζш - надбавки на кривизну и шероховатость поверхности корпуса судна соответственно.
Для условного подводного судна примера можно принять
Δζк< 0,1ζт и Δζш= 0,5•10-3:
Ω м2 - площадь поверхности судна, смачиваемая водой;
L - длина судна, м;
ν = 1,57 • 10-5 - коэффициент кинематической вязкости воды.
Как следует из приведенных данных, коэффициент сопротивления трения ζт и сила трения с увеличением скорости движения судна уменьшаются. (Этот вывод справедлив и для воздушного судна).
Сопротивление формы Xф кг(с) определяется по выражению ,
,
здесь  - коэффициент сопротивления формы;
- коэффициент сопротивления формы;
Ω м2 - площадь поперечного сечения корпуса судна в миделе;
Lк - длина кормового заострения корпуса, м.
Сопротивление выступающих частей Xв.ч. кг(с) определяется по выражению
Здесь ζвч - коэффициент сопротивления выступающих частей.
Для условного подводного судна примера можно принять
ζвч= 0,2(ζт+Δζк+Δζш+ζф).
Таким образом, общее сопротивление X кг(с) условного судна при движении под водой ориентировочно, будет равно
X = Xт+Xф+Xв.ч= 1,2(1,1ζт+ζф+0,5•10-3)•Ω•ρV2/2.
Так, для условного подводного судна с главными размерениями (м) длина • диаметр, как 100 • 7, площадь поверхности которого равна Ω = 1800 м2, а длина кормового заострения Lк = 60 м при скорости подводного хода V = 10 м/с (19,5 узлов) будем иметь .
.
Общее сопротивление движению такого подводного судна ориентировочно будет равно .
.
Установка на носовую часть гидродинамического конусного кольца с непредельными величинами параметров
даст силу тяги T кг(с), равную
Отношение силы тяги к сопротивлению будет равно
Так как δ = 1,44 > 1 , то это указывает на возможность режима отрицательного сопротивления в автомодельном режиме и для подводного судна при его подводном плавании со всеми вытекающими из этого последствиями:
1. Величину верхнего предела скорости Vmax автомодельного режима в данном случае будет ограничивать явление кавитации, когда скорость обтекания профиля кольца достигнет определенной величины, давление на выпуклой стороне профиля, или на обеих его сторонах за счет динамического разрежения  понизится настолько, что станет равным давлению Pd насыщенных паров воды при данной температуре, в результате вода закипает и из нее выделяются растворенные в ней газы, поэтому дальнейшее увеличение скорости обтекания профиля не влечет за собой увеличения тяги, а только увеличение сопротивления. Учитывая вышеизложенное, условие начала возникновения кавитации в верхней части гидродинамического кольца диаметром d м можно записать
понизится настолько, что станет равным давлению Pd насыщенных паров воды при данной температуре, в результате вода закипает и из нее выделяются растворенные в ней газы, поэтому дальнейшее увеличение скорости обтекания профиля не влечет за собой увеличения тяги, а только увеличение сопротивления. Учитывая вышеизложенное, условие начала возникновения кавитации в верхней части гидродинамического кольца диаметром d м можно записать .
.
Отсюда ,
,
здесь  - абсолютное гидростатическое давление в верхней части кольца на глубине, м;
- абсолютное гидростатическое давление в верхней части кольца на глубине, м;
Pd = 125 кг(с)/м2 - давление насыщенных паров воды при +10oC.
Для условного подводного судна с = 4 м на глубине движения h = 20 м Vmax будет равна
С увеличением глубины движения Vmax = 63,9 м/с (230 км/ч).
Других причин, способных ограничивать Vmax на меньших уровнях, автору не известно.
Обеспечение возможности уменьшения скорости движения на меньших, чем vmax, скоростях аналогично указанному выше для воздушного судна.
2. Минимальная скорость Vmin м/с начала автомодельного режима для подводного судна определяется из того же условия ,
,
отсюда .
.
Минимальная скорость Vmin начала автомодельного режима для подводного судна будет Vmin ≥ 1 м/с (3,6 км/ч).
Для создания начального ускорения и разгона подводного судна до Vmin оно должно иметь с приводом от двигателя независимый движитель, например, свободный водяной винт или винт в нерегулируемом или регулируемом кольце.
3. Избыточная мощность движителя подводного судна на скорости движения V м/с составит
Для условного судна с  и V = 20 м/с избыточная мощность будет равна
и V = 20 м/с избыточная мощность будет равна
Часть этой мощности может быть "введена" внутрь подводного судна и полезно использована в промышленных целях в процессе движения под водой.
Сопротивление движению X надводного водоизмещающего судна складывается из сопротивления трения Xт, сопротивления формы или вихревого Xф, сопротивления выступающих частей Xв.ч, волнового сопротивления Xв и сопротивления воздуха Xвз.
Сопротивления Xт, Xф, Xвч определяются теми же причинами и вычисляются по тем же выражениям, что и для подводного судна
Для водоизмещающего судна, которое будет рассмотрено в качестве примера можно принять
Величина волнового сопротивления водоизмещающего судна определяется выражением
Здесь ζв - коэффициент волнового сопротивления судна, величина которого в отличии от остальных коэффициентов сопротивления не остается постоянной (ζф), или уменьшающейся величиной (ζт) при увеличении скорости движения, а увеличивается с увеличением скорости движения судна.
Если пренебречь влиянием на величину ζв интерференции носовой и кормовой систем поперечных волн, которая несколько увеличивает при неблагоприятной интерференции и уменьшает его при благоприятной, то можно в первом приближении считать эту зависимость в виде ζв= A•V2.
Для условного водоизмещающего судна примера можно положить A = 0,0175 • 10-3, тогда величина ζe будет равна
ζe= 0,0175•10-3V2.
Таким образом, общее сопротивление воды X условного водоизмещающего судна будет равно
Для условного водоизмещающего судна с главными размерениями,м: длина • ширина • осадка, как 100 • 16 • 6, величина смоченной поверхности корпуса которого Ω = 2080 м2, площадь миделя ω = 89,3 м2 и длина кормового заострения Lк = 30 м, известно, что для движения такого судна с установившейся скоростью 18 узлов (9,25 м/с) требуется тяга-упор движителя XΣ = 57640 кг(с).
Условное судно имеет носовую подводную бульбу с полусферической головной частью, радиус которой Rк = 2 м.
Для такого судна
Общее сопротивление воды движению этого судна будет определяться выражением
Для скорости движения V = 9,25 м/с будет равно
Сопротивление воздуха Xвз движению судна на скорости V = 9,25 м/с будет равно
Xв3= XΣ-X = 57640-53767 = 3873 кг(c).
Если считать, что движение условного судна происходит в штиль, то скорость встречного потока воздуха будет равна скорости движения судна по воде и сопротивление воздуха можно заменить эквивалентным сопротивлением воды.
Из выражения  найдем
найдем .
.
Коэффициент общего сопротивления, пропорциональный квадрату скорости (8,97), надо увеличить на ζэ= 0,87, т.е. принять равным 8,97 + 0,87 = 9,84.
Окончательно выражение для определения общего сопротивления движения условного судна будет равно
Установка на головную часть носовой подводной бульбы гидродинамического конусного кольца с параметрами
обеспечит силу тяги кольца
Отношение  будет равно
будет равно
Для установившегося движения  Отсюда максимальная скорость Vmax установившегося движения условного судна с гидродинамическим кольцом на бульбе будет равна
Отсюда максимальная скорость Vmax установившегося движения условного судна с гидродинамическим кольцом на бульбе будет равна
При движении с меньшей скоростью V <Vmax появляется излишняя мощность движителя, которая может быть "введена" внутрь судна и полезно использована для промышленных целей в процессе движения.
Величина этой мощности равна
Величина избыточной мощности имеет при V = VN максимум, условие которого  :
:
или
3 • 5,84 - 5 • 0,0364 • V2 = 0,
отсюда
Так как  то при V = 93,81 м/с действительно будет максимум, равный
то при V = 93,81 м/с действительно будет максимум, равный
Таким образом, при изменении скорости движения судна от Vmax = 45,6 км/ч до V = 35,3 км/ч можно получить избыточную мощность 0 - 1125 кВт.
Для увеличения величины избыточной мощности и в какой то мере максимальной скорости движения судна на подводной носовой бульбе можно разместить два или несколько соосных кольцевых статических вододвижителя. При этом надо иметь в виду, что на скорости движения V > 15 м/с (54 км/ч) на верхней части гидродинамического кольца из-за малой глубины его погружения могут начаться кавитационные явления со всеми вытекающими из этого последствиями.
Учитывая, что движение водоизмещающего судна при значительном волнении воды часто сопровождается частичным "оголением" движителя, что приводит к снижению эффективности его работы, вспомогательный двигатель такого судна должен иметь существенно большую мощность, чем для воздушного или подводного судна для того, чтобы при движении в таких особо тяжелых условиях сохранить ходкость судна в допустимых пределах за счет совместной работы статического и обычного винтового движителя.
Как уже отмечалось, для создания начального упора и разгона транспортного судна до минимальной скорости начала автомодельного режима, требуется независимый дополнительный движитель с приводом от двигателя. В качестве такого движителя можно использовать воздушный винт для воздушных транспортных средств или водяной винт для подводных и надводных водоизмещающих судов (далее по тексту - винт).
Эти же движители, работающие в двигательном режиме, способны ввести внутрь транспортного средства значительную избыточную, мощность, которая возникает на околопредельных скоростях движения.
Такое двойное использование винта предопределяет необходимость изменения шага винта в процессе движения, т. е. применение винта изменяемого шага (ВИШ). По величине мощности и продолжительности работы основным режимом работы ВИШ будет двигательный. Учитывая, что при переходе от движительного режима к двигательному и обратно должен изменяться на противоположный по знаку угол атаки профиля лопасти и плохую работу плоско-выпуклых профилей с отрицательными углами атаки, основной двигательный режим работы ВИШ должен обеспечиваться положительными углами атаки, либо для такого винта должны применяться близкие к симметричным тонкие профили.
Одна из возможностей полезного промышленного использования во время движения даровой избыточной мощности статического движителя, введенной внутрь судна, - это промышленное электролизное разложение воды на водород и кислород, ожижение продуктов разложения и поддержание их в жидком состоянии до момента выгрузки. Водород и кислород могут составить основу водородно-кислородной энергетики и технологии ближайшего будущего, в частности могут использоваться как топливо и окислитель для экологически наиболее чистых и безопасных двигателей, например, транспортных средств, в том числе и для вспомогательных двигателей привода дополнительных независимых движителей самих энергетических производственно-транспортных судов.
Дополнительное использование на подводном судне произведенных промышленных продуктов разложения воды для жизнеобеспечения пассажиров и экипажа такого судна позволит сделать неограниченным район и продолжительность подводного плавания, а значит и обеспечит возможность эффективного использования подводного судна в гражданских целях для наиболее быстрых и дешевых подводных грузопассажирских перевозок на неограниченные расстояния.
Указанная возможность промышленного использования даровой энергии является наиболее энергоемкой на единицу произведенной продукции и экологически наиболее чистой и безопасной, что, конечно, не исключает и других возможностей использования такой энергии.
Автору ничего не известно о промышленном производстве продуктов электролиза воды на транспортных средствах.
Принудительное формирование направления и скорости потока, обеспечивающее безотрывное с требуемым углом атаки обтекание кольцевого конусного профиля, возможно и другими типами криволинейных поверхностей, требующихся для работы какого-либо устройства с набегающим потоком, если уменьшение создаваемого таким устройством сопротивления будет необходимым или хотя бы полезным.
Например, в ветроэнергетической установке с винтом в аэродинамической трубе по (1), общее сопротивление для набегающего потока которой X = 4/3•π•R
может обеспечить тягу
Отношение силы тяги к силе сопротивления будет равно
Основой производственно-технологического оборудования любого производства на транспортном средстве является автономная система электроснабжения. Общепринятым наилучшим вариантом такой системы считается система переменного тока стабильной частоты 50 Гц или 400 Гц, которая позволяет использовать большую номенклатуру выпускающихся высоконадежных и долговечных бесконтактных электрических машин и другого общепромышленного на 50 Гц или специального назначения на 400 Гц для воздушных, водных и сухопутных транспортных средств.
Задача получения стабильной частоты (СЧ) легко решается, например, синхронным генератором, если его приводной двигатель по точности поддержания частоты вращения выходного вала полностью отвечает требованиям к точности поддержания частоты переменного тока. Получение стабильной частоты переменного тока при переменной частоте вращения приводного двигателя (СЧПЧ) пока не имеет общепринятого решения, особенно для больших мощностей автономной системы. В (5) автор совместно с инж. Отрепьевой Н.Н. предлагает одно из возможных решений этой задачи. Сущность этого решения в том, что в качестве основного электрического генератора автономной системы электроснабжения применяют асинхронный генератор (АГ) (фиг. 4) для возбуждения и регулирования напряжения которого, а также для стабилизации частоты переменного тока на заданном уровне и обеспечения потребителей реактивной мощностью используют синхронный компенсатор (СК), для стабилизации режима работы которого по частоте вращения применяют дополнительный синхронно-асинхронный двигатель (САД), работающий от стабилизированного по частоте одно- или двухфазного преобразователя (СПЧ). Заданный уровень напряжения поддерживается обычным регулятором напряжения (РН).
Источники информации
1. Глазунов И. М. Способ повышения эффективности использования энергии ветра и ветроэнергетическая установка (ее варианты). -Заявка N 94005785 от 17.02.94 г.
2. Бонд Б. Справочник яхтсмена. Судостроение, 1989.
3. Фукельман В.Л. Основы гидромеханики и теории корабля. Судостроение. - Л.: 1971.
4. Юрьев Б.Н. Воздушные винты. -М.: Госмашметиздат, 1933.
5. Глазунов И. М. , Отрепьева Н.Н. Способ получения стабильной частоты переменного тока и устройство для его осуществления. - Заявка N 93053617 от 30.11.93 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТРУЙНО-ЩЕЛЕВАЯ ЛОПАСТЬ ВОЗДУШНОГО ВИНТА | 1993 |
|
RU2081789C1 |
| ДВИЖИТЕЛЬНЫЙ КОМПЛЕКС ДЛЯ ПОДВОДНОГО АППАРАТА | 2002 |
|
RU2222469C1 |
| АСИММЕТРИЧНОЕ СУДНО | 2015 |
|
RU2629637C2 |
| АКТИВНОЕ ПОДВОДНОЕ КРЫЛО | 1999 |
|
RU2176609C2 |
| ЭКРАНОПЛАН С ВОДОМЁТНЫМ ДВИЖИТЕЛЕМ | 2015 |
|
RU2582505C1 |
| УСТРОЙСТВО, ПОВЫШАЮЩЕЕ ПРОПУЛЬСИВНЫЕ ПОКАЗАТЕЛИ ВОДОМЕТНЫХ ДВИЖИТЕЛЕЙ | 2003 |
|
RU2247058C1 |
| МНОГОКОРПУСНОЕ СУДНО | 2022 |
|
RU2781170C1 |
| ВЫСОКОСКОРОСТНОЕ СУДНО С ГИБРИДНЫМ ВОДНЫМ ДВИЖИТЕЛЕМ (ВАРИАНТЫ) | 2019 |
|
RU2703372C1 |
| Самостабилизирующийся лопастной движитель | 2022 |
|
RU2798298C1 |
| Водно-воздушное транспортное средство | 2021 |
|
RU2785913C2 |


Изобретение относится к движителям с использованием энергии течения среды. Движитель выполнен в виде многощелевого конусного кольца, поперечное сечение аэродинамического профиля которого составлено из ряда составляющих профилей, расположенных на расстоянии друг от друга. Хорда последнего составляющего профиля совпадает с хордой профиля поперечного сечения многощелевого конусного кольца, а хорды профилей, расположенных перед последним из составляющих профилей, наклонены к хорде составного многощелевого конусного кольца. Кроме того, представлены варианты размещения движителя на округлой головной части летательного аппарата с легким газом, на бульбе надводного судна и носовой части подводной лодки. 4 с.п.ф-лы, 4 ил.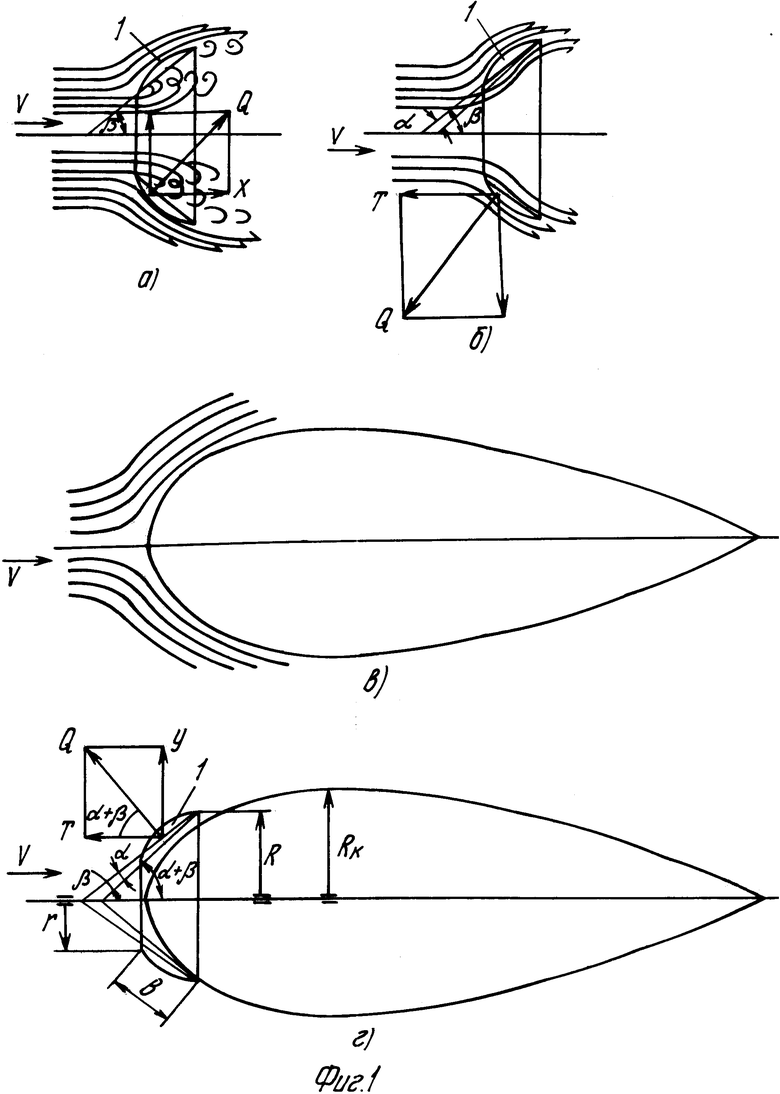
| Юрьев Б.Н | |||
| Воздушные винты | |||
| М.-Л.: Госмашметиздат, 1933, с | |||
| САННЫЙ ВЕЛОСИПЕД С ВЕДУЩИМ КОЛЕСОМ, СНАБЖЕННЫМ ШИПАМИ | 1921 |
|
SU265A1 |
| Катера и яхты, N 4/128, 1987, с | |||
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
| US, патент, 3469802, кл | |||
| Нефтяной конвертер | 1922 |
|
SU64A1 |
| US, патент, 3102504, кл | |||
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| EP, заявка, 0583666, кл | |||
| Нефтяной конвертер | 1922 |
|
SU64A1 |
