Предлагаемое техническое решение относится к области космической техники, а конкретнее к устройствам, предназначенным для стыковки космических аппаратов в условиях невесомости.
Известно стыковочное устройство космического корабля "Союз" (Сыромятников B. C. Стыковочные устройства космических аппаратов, Москва, Машиностроение, 1994, с. 18, рис. 1.7 и с. 20, рис. 1.8), которое содержит корпус, выдвижной элемент в виде головки, направляющие в виде больших винтов, механизм тарированных моментов, электропривод (механизм тарированных моментов, электропривод на рис. не показаны). Такое стыковочное устройство создает большие усилия при стыковке на конструкции космических кораблей.
Ближайшим из аналогов является стыковочное устройство АПАС-75 для "Союза"-"Аполлона" (Сыромятников B. C. Стыковочные устройства космических аппаратов, Москва, Машиностроение, 1994, с. 39, рис. 1.28), кинематическая схема которого приведена на рисунке и содержит дифференциальный механизм (названный дифференциалом связи штанг), своим входом кинематически соединенный с направляющими, в качестве каждой из которых используется винт с шариковинтовым преобразователем, и через них - с выдвижным элементом - кольцом с выступами. Выход этого дифференциального механизма кинематически соединен с механизмом тарированных моментов, в качестве которого используется фрикционный самонастраивающийся тормоз, и через него - с электроприводом. Таким образом это стыковочное устройство имеет один механизм тарированных моментов, который служит как для поглощения основной части энергии соударения стягиваемых объектов, так и для тарирования подтягивающей силы, которая велика из-за значительных инерционных масс стягивании стягиваемых объектов, обжатия резиновых уплотнений, преодоления сил пружинных элементов, что вызывает большие нагрузки на конструкцию, особенно существенно это для многозвенной космической долговременной станции (КДС).
Техническим решением предлагаемого изобретения является уменьшение нагрузок на конструкцию космической долговременной станции.
Техническое решение достигается тем, что в стыковочное устройство, содержащее корпус, установленный на нем первый дифференциальный механизм, входы которого через направляющие связаны с выдвижным элементом, а также электропривод, выход которого связан с входом первого механизма тарированных моментов, отличающееся тем, что в него введены второй механизм тарированных моментов и второй дифференциальный механизм, один вход которого кинематически соединен с выходом первого механизма тарированных моментов, а второй кинематически - со входом второго механизма тарированных моментов, выход которого жестко соединен с корпусом, а на входе установлен управляемый переключающий механизм, при этом выход первого дифференциального механизма кинематически соединен c выходом второго дифференциального механизма.
Применение двух механизмов тарированных моментов позволит разделить функции таким образом, что один механизм будет использоваться в режиме амортизации, а второй - в режиме стягивания, благодаря чему появится возможность выбирать требуемое значение силы при амортизации в обе стороны: при просадке и при отдаче. Таким же образом можно менять силу режима стягивания.
Сущность изобретения поясняется чертежом, на котором приведена схема предлагаемого устройства.
Стыковочное устройство состоит из корпуса 1, установленного на нем первого дифференциального механизма 2, через направляющие 3 связанного с выдвижным элементом, на котором выполнены выступы 4; выход первого дифференциального механизма цилиндрической передачей 5 связан с выходом второго дифференциального механизма 6. При этом дифференциальный механизм 2 связан с выдвижным элементом своими входами с коническими передачами 7, первый вход второго дифференциального механизма 6 связан с корпусом первого механизма тарированных моментов 8, вход которого через шлицевое соединение кинематически соединен с выходом электропривода 9. Второй вход второго дифференциального механизма 6 связан с входом второго механизма тарированных моментов 10 через управляемый переключающий механизм 11, выход второго механизма тарированных моментов 10 жестко связан с корпусом 1.
При этом в качестве первого 8 и второго 10 механизма тарированных моментов можно использовать предохранительную фрикционную муфту со стабилизирующим устройством (см. Поляков B.C., Барбаш И.Д., Ряховский О.А. Справочник по муфтам, Ленинград, Машиностроение, 1974, с. 292, рис. VII.26). Первый и второй дифференциальные механизмы могут быть выполнены по схеме (см. Кудрявцев В. Н. Планетарные передачи. 1966, с. II, рис. 7.в), при этом выходом в каждом из этих механизмов являются водила "Н", входами являются оси шестерен "а" и "в". Выполнение корпуса 1 см. Сыромятников B.C. Стыковочные устройства космических аппаратов, Москва, Машиностроение, 1994, с. 77, рис. 3.2. Направляющие 3 могут быть выполнены в виде винтов с шариковинтовыми преобразователями (см. рис. 3.13 и рис. 3.16, с.с. 94 и 102, Сыромятников B.C.), выдвижной элемент с выступами может быть выполнен в виде кольца с выступами (см. там же рис. 1.25, с. 36). Управляемый переключающий механизм можно выполнить в виде электромагнитной порошковой муфты (см. Поляков B.C., Барбаш И. Д., Ряховский О.А. Справочник по муфтам, Ленинград, Машиностроение, 1974, с. 196, рис. V. 15, вариант 2 и рис. V. 14, однокатушечная схема с неподвижной катушкой).
Перед началом стыковки космических объектов выдвижной элемент 4 перемещается в исходное положение электроприводом 9, движение которого передается через первый механизм тарированных моментов 8, второй дифференциальный механизм 6, цилиндрическую передачу 5, первый дифференциальный механизм 2, конические передачи 7 и направляющие 3, так как ведомый малоинерционный элемент управляемого переключающего механизма 11 удерживается электромагнитным полем неподвижной катушки моментом большим чем момент первого механизма тарированных моментов. После выхода в исходное положение выдвижного элемента неподвижная катушка управляемого переключающего механизма 11 и электропривод 9 обесточиваются.
В процессе стыковки двух объектов энергия соударения через выдвижной элемент с выступами 4, направляющими 3, конические передачи 7, первый дифференциальный механизм 2, цилиндрическую передачу 5, второй дифференциальный механизм 6 направляется через молоинерционный элемент управляемого переключающего механизма 11 на второй механизм тарированных моментов. При этом первый механизм тарированных моментов 8 настроен на больший чем второй механизм тарированных моментов 10, поэтому он остается неподвижным и энергии не поглощает. Возникающие реактивные силы при этом передаются через корпуса стыковочных устройств 1 на корпуса объектов, а часть энергии соударения преобразуется в тепло во втором механизме тарированных моментов 10.
После поглощения энергии соударения и успокоения объектов включаются неподвижная катушка управляемого переключающего механизма 11 и электропривод 9, движение от привода 9 передается через первый механизм тарированных моментов 8, второй дифференциальный механизм 6, цилиндрическую передачу 5, первый дифференциальный механизм 2, конические передачи 7, направляющие 3 на выдвижной элемент 4. Происходит стягивание объектов до соприкосновения стыков с возникновением реактивных сил, ограниченных настройкой первого механизма тарированных моментов 8 и действующих только на корпуса стыковочных устройств.
Список литературы
1. Сыромятников B.C. Стыковочные устройства космических аппаратов. - М.: Машиностроение, 1994, с. 18, рис. 1.7 и с. 20, рис. 1.8.
2. Там же, 1994, с. 39, рис. 1.28.
3. Поляков B.C., Барбаш И.Д., Ряховский О.А. Справочник по муфтам. - Л.: Машиностроение, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ СТЫКОВКОЙ | 2000 |
|
RU2167795C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ КОМАНДЫ НА ИСКЛЮЧЕНИЕ АВАРИЙНОЙ СИТУАЦИИ ПРИ УПРАВЛЕНИИ ИСПОЛНИТЕЛЬНЫМИ МЕХАНИЗМАМИ СТЫКОВОЧНОГО АГРЕГАТА | 2000 |
|
RU2167797C1 |
| УСТРОЙСТВО ВЫПУСКА ТРОСА СВЯЗКИ ДВУХ КОСМИЧЕСКИХ АППАРАТОВ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ НЕГО | 1999 |
|
RU2148535C1 |
| СТЫКОВОЧНЫЙ МЕХАНИЗМ КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2662605C2 |
| ПЕРИФЕРИЙНЫЙ СТЫКОВОЧНЫЙ МЕХАНИЗМ | 2017 |
|
RU2657623C1 |
| СТЫКОВОЧНОЕ УСТРОЙСТВО ДЛЯ КОСМИЧЕСКИХ АППАРАТОВ | 2014 |
|
RU2584042C2 |
| МЕХАНИЗМ ГЕРМЕТИЗАЦИИ СТЫКА СТЫКОВОЧНЫХ АГРЕГАТОВ | 2014 |
|
RU2559666C1 |
| СТЫКОВОЧНЫЙ МЕХАНИЗМ КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2706639C2 |
| УСТРОЙСТВО ДЛЯ ВЫДВИЖЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ ИЗ КОСМИЧЕСКОГО АППАРАТА | 2005 |
|
RU2302981C2 |
| УСТРОЙСТВО СТЫКОВКИ КОСМИЧЕСКИХ МОДУЛЕЙ | 2003 |
|
RU2269462C2 |
Изобретение относится к космической технике и предназначено для стыковки космических аппаратов в условиях невесомости. Согласно изобретению устройство содержит корпус и установленные на нем первый и второй дифференциальные механизмы, а также два механизма тарированных моментов. Механизмы кинематически связаны друг с другом и с электроприводом. Один из механизмов тарированных моментов может использоваться в режиме амортизации, а второй - в режиме стягивания, что позволяет выбирать требуемое значение силы при амортизации. Изобретение обеспечивает уменьшение нагрузок на конструкцию долговременной космич. станции при проведении ее обслуживания. 1 ил.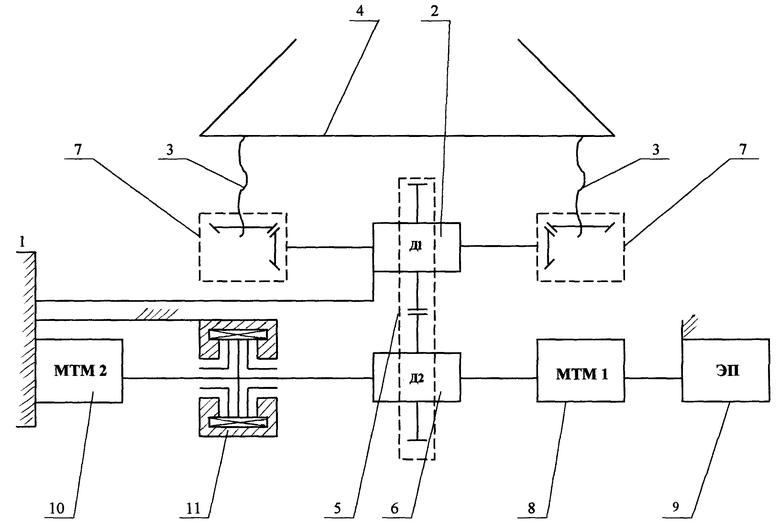
Стыковочное устройство, содержащее корпус, установленный на нем первый дифференциальный механизм, входы которого через направляющие связаны с выдвижным элементом, а также электропривод, выход которого связан с входом первого механизма тарированных моментов, отличающееся тем, что в него введены второй механизм тарированных моментов и второй дифференциальный механизм, один вход которого кинематически соединен с выходом первого механизма тарированных моментов, а другой кинематически соединен с входом второго механизма тарированных моментов, выход которого жестко соединен с корпусом, а на входе установлен управляемый переключающий механизм, при этом выход первого дифференциального механизма кинематически соединен с выходом второго дифференциального механизма.
| Сыромятников В.С | |||
| Стыковочные устройства космических аппаратов | |||
| - М.: Машиностроение, 1994, с.39, рис.1.28 | |||
| US 3820741 A, 1974-06-28 | |||
| DE 3316789 A, 1970-09-01 | |||
| Поляков В.С | |||
| и др | |||
| Справочник по муфтам | |||
| - Л.: Машиностроение, 1974. |

