Изобретение относится к космической технике, в частности к стыковочным устройствам космических аппаратов (КА).
Известен периферийный стыковочный механизм (СтМ) АПАС (первый аналог), описанный в книге B.C. Сыромятников. Стыковочные устройства космических аппаратов. - М.: Машиностроение, 1984. - 216 с. и в патенте RU №2131829 «Андрогинный периферийный агрегат стыковки (АПАС) и демпфер амортизационно-приводной системы для него». В каждой из шести штанг, связывающих стыковочное кольцо с основанием механизма, шток поступательного шарнира представляет собой винт, поступательное и угловое перемещение которого относительно корпуса штанги преобразуется во вращение гайки шарико-винтового преобразователя (ШВП), установленного с возможностью вращения на этом корпусе. Винт в ШВП может совершать и поступательное и вращательное движение, а гайка только вращательное. Поэтому ШВП имеет три степени подвижности и является дифференциальным механизмом. Шесть штанг СтМ делятся на пары, в каждой из которых винты связаны шестерней, а гайки - редукторами с общим валом. Вращение пар винтов пропорционально разности длин штанг, а вращении пар гаек пропорционально изменению их средней длины. С шестернями и редукторами, объединяющими соответственно вращение винтов и вращения гаек в парах штанг, связаны пружинные механизмы и электромагнитные демпферы. Валы редукторов, связывающих вращение гаек в паре штанг, соединены с тремя валами блока дифференциалов, который представляет собой три связанных между собой планетарных механизма. Этот блок обеспечивает перераспределение движения между валами пар штанг в направлении наименьшего сопротивления, то есть разворот стыковочного кольца под действием приложенной к кольцу внешней контактной силы, улучшая условия сцепки при угловых рассогласованиях продольных осей активного и пассивного стыковочных агрегатов. С шестернями, объединяющими вращения винтов пар штанг и валами блока дифференциалов, соединенных с парами штанг, связаны управляемые фиксаторы, включение которых блокирует вращении этих шестерен и валов и обеспечивает согласованное изменения длин штоков штанг. Угол поворота четвертого вала блока дифференциалов пропорционален среднему углу поворота трех других ее валов, то есть углу поворота гаек в трех парах штанг и соответственно продольному осевому движению центра стыковочного кольца. С этим валом связан фрикционный тормоз для поглощения энергии сближения активного КА и электропривод для выдвижения или втягивания штоков всех штанг СтМ.
Электропривод СтМ может переводить его в три различных положения -полностью втянутое положение, исходное перед стыковкой положение, и полностью выдвинутое положение. В полностью втянутом положении штоки всех штанг полностью втянуты, а плоскость стыковочного кольца находится ниже стыковочной плоскости агрегата. В полностью выдвинутом положении СтМ штоки всех штанг полностью выдвинуты, а стыковочное кольцо находится на максимальном удалении от стыковочной плоскости агрегата. Исходное перед стыковкой положение СтМ является промежуточным между полностью втянутым и полностью выдвинутым. Длина выдвинутых штоков всех штанг в этом положении составляет примерно 60-80% от максимальной (полностью выдвинутой) и выбирается исходя из начальных условий стыковки и энергоемкости демпфирующих элементов, которые должны поглотить энергию сближения активного КА. Выдвижение из полностью втянутого положения в исходное перед стыковкой положение с помощью электропривода необходимо потому, что пружинные механизмы СтМ связаны с дифференциальными механизмами, они накапливают энергию только при боковых и угловых отклонениях стыковочного кольца от продольной оси и поэтому в полностью втянутом и исходном перед стыковкой положениях не деформированы. Перевод в полностью выдвинутое положение при стыковке необходим для выравнивания длин всех штанг и соответственно выравнивания СтМ относительно своей продольной оси.
Выдвижение из полностью втянутого положения в исходное перед стыковкой положение выполняется приводом по команде блока управления. При достижении исходного перед стыковкой положения контактное устройство на приводе формирует сигнал, по которому блок управления выключает привод на выдвижение. При стыковке сцепка, то есть срабатывание трех защелок, производится за счет кинетической энергии сближения активного КА. При этом кольцо СтМ отклоняется и разворачивается относительно продольной оси СтМ, подстраиваясь под положение пассивного агрегата за счет закрутки валов пружинных механизмов. Состояние сцепки фиксируется в блоке управления при одновременном наличии сигналов от трех датчиков совмещения колец (ДСК), расположенных на плоскости кольца рядом с направляющими выступами. После сцепки энергия осевого сближения активного КА рассеивается на фрикционном тормозе СтМ в течение нескольких секунд. Блок управления через фиксированный интервал времени после достижения сцепки включает также на фиксированный интервал времени электромагнитные демпферы, которые рассеивают энергию боковых и угловых движений активного КА относительно пассивного. После завершения поглощения энергии сближения активного КА СтМ не возвращается в свое исходное положение из-за необратимой просадки фрикционного тормоза. Кроме того, он может остаться в не выровненном положении относительно своей продольной оси из-за трения в редукторах или из-за больших моментов инерции стыкуемых объектов. Поэтому блок управления выдает команду на привод для перевода СтМ в полностью выдвинутое положение. При достижении этого положени контактное устройство привода формирует сигнал, по которому блок управления выключает привод на выдвижение, подает команду на включение управляемых фиксаторов, а после этого - команду приводу на втягивание СтМ. При втягивании включенные фиксаторы препятствуют рассогласованию длин штоков штанг, заставляя СтМ и стыковочное кольцо перемещаться только вдоль своей продольной оси. После того, как стыковочное кольцо втянуто за стыковочную плоскость, оно обжимает три датчика конечного положения (ДКП), установленные на корпусе агрегата. При наличии сигналов со всех трех ДКП блок управления выключает привод на втягивание.
Конструкции этого стыковочного механизма имеет следующие недостатки.
Выдвижение с большой скоростью кольца вперед из исходного перед стыковкой положения для улучшения условий сцепки невозможно, так как в конструкции используется один электропривод, который должен создавать большую силу стягивания для соединения электро- и гидроразъемов, обжатия резинового уплотнения на стыковочной плоскости агрегата; необходимая величина этой силы обеспечивается большим коэффициентом редукции, который обуславливает малую скорость выдвижения и стягивания.
Угловые развороты кольца стыковочного механизма осуществляются блоком дифференциалов только на основе заранее согласованного и конструктивно реализованного соотношения между движениями пар штанг без адаптации к реальному относительному положению стыковочных агрегатов, что не всегда способствует сцепке.
Применение дифференциальных механизмов значительно усложняет конструкцию и увеличивает инерционность стыковочного механизма, которая ухудшает условия сцепки.
Применяемые электромагнитные демпферы эффективны только при больших скоростях вращения их валов. Поэтому они связаны с движением штанг через многоступенчатые редукторы с большими передаточными отношениями. В результате еще больше усложняется конструкция стыковочного механизма, а вклад демпферов в приведенную инерцию его кольца растет значительно быстрее (в квадрате), чем противодействующий момент магнитов.
Известен периферийный СтМ (второй аналог), описанный в патенте US 20150266595. Его стыковочное кольцо связано с корпусом шестью штангами, штоки которых движутся независимо. На каждом штоке, на его конце, входящем в корпус штанги, установлен шарико-винтовой преобразователь (ШВП), а внутри корпуса штанги, со стороны его основания, связанного вращательным шарниром с корпусом агрегата, установлен винт с возможностью вращения относительно продольной оси корпуса. Один конец винта входит в соосное зацепление с ШВП подвижного штока, а другой через редуктор и предохранительную фрикционную муфту связан с выходным валом электропривода, а также с управляемым тормозом, блокирующим вращение при отсутствии напряжения, подаваемого на электропривод.
В полностью втянутом положении СтМ редукторы всех штанг заблокированы управляемыми тормозами, штоки и стыковочное кольцо неподвижны. Выдвижение в исходное перед стыковкой положение выполняется по команде блока управления на приводы всех штанг. Моменты, создаваемые приводами, вращают ШВП и выдвигают штоки штанг и стыковочное кольцо. Удержание СтМ в исходном перед стыковкой положении обеспечивается включением управляемых тормозов.
В процессе стыковки по команде блока управления выключаются управляемые тормозы, включаются электроприводы всех штанг и стыковочное кольцо, выдвигаемое штоками, движется вперед вдоль продольной оси СтМ. Силы, возникающие при контактном взаимодействии стыковочного кольца с пассивным КА, препятствуют этому выдвижению. Электропривод каждой штанги создает момент в соответствии со своей нагрузочной характеристикой и либо преодолевает это сопротивление, либо переходит в генераторный режим. В результате этого кольцо может смещаться, подстраиваясь под действующую контактную нагрузку и улучшая условия для сцепки. После сцепки моменты сопротивления, создаваемые электроприводами, инерцией их роторов и предохранительными фрикционными муфтами обеспечивают поглощение энергии сближения активного КА. Вследствие отсутствия пружин в конструкции СтМ его выравнивание и последующее втягивание выполняется приводами по командам блока управления.
Конструкции этого стыковочного механизма имеет следующие недостатки.
Большое число электродвигателей (12 при дублировании) и большая потребляемая мощность.
Для того чтобы штоки штанг могли двигаться в диапазоне скоростей, заданном допустимыми начальными условиями сближения активного КА, коэффициент редукции ШВП должен быть снижен, что соответственно снижает силы, в которые преобразуются моменты, создаваемые электроприводами. Увеличение мощности привода увеличивает его габариты и усложняет его установку на корпусе штанги. То есть для эффективной реализации такого способа демпфирования и управления необходимо использовать электродвигатели с уникальными характеристиками -малогабаритные, высокооборотные, мощные и желательно с малым энергопотреблением.
Известен периферийный СтМ (прототип) американского космического корабля «Аполлон», описанный в книге B.C. Сыромятников. Стыковочные устройства космических аппаратов. - М.: Машиностроение, 1984. - 216 с, в котором стыковочное кольцо с направляющими выступами и установленными на них корпусами механизмов защелок для сцепки; связано с корпусом стыковочного агрегата шестью штангами, установленными с возможностью движения независимо друг от друга, при этом шток каждой штанги первым своим концом связан вращательным шарниром со стыковочным кольцом, а вторым своим концом входит с возможностью поступательного перемещения вдоль продольной оси в корпус штанги, основание которого связано вращательным шарниром с корпусом стыковочного агрегата. Движению штока относительно корпуса штанги противодействуют две пружины сжатия и гидравлический демпфер. Положение СтМ может быть изменено с помощью электропривода вращения барабана намотки тросов, при этом каждый трос через направляющий ролик и пружину компенсации разности длин тросов соединен с корпусом механизма защелок на одном из направляющих выступов стыковочного кольца.
В нерабочем состоянии стыковочный механизм находится во втянутом положении, то есть все штоки полностью втянуты, пружины всех его штанг максимально сжаты, а плоскость стыковочного кольца находится несколько ниже стыковочной плоскости агрегата. Втягивание СтМ в это положение производится тремя тросами, которые наматываются на барабан, который вращается электроприводом, расположенным на корпусе агрегата. Каждый из трех тросов соединяется пружиной Бельвиля, компенсирующей разность длин тросов, с корпусом защелки, установленной на одном из направляющих выступов стыковочного кольца и подается на барабан через устройство выравнивания кольца при стягивании, расположенное на самом кольце под его направляющим выступом, через устройство выравнивания кольца при стягивании и через направляющий ролик, расположенные на корпусе агрегата под направляющим выступом кольца. В полностью втянутом положении СтМ силы растяжения тросов уравновешивают силы реакции сжатых пружин и кольцо остается неподвижным.
Перед стыковкой по команде блока управления СтМ переводится в выдвинутое положение, в котором штанги, их пружины и тросы имеют максимальную длину, а стыковочное кольцо максимально удалено от стыковочной плоскости стыковочного агрегата. Для этого блок управления подает команду на вращение электропривода в направлении увеличения свободной длины тросов. В результате под действием сжатых пружин штанг все штоки выдвигаются из корпусов штанг и кольцо движется вперед вдоль продольной оси СтМ
В начальной фазе стыковки при контактном взаимодействии стыковочного кольца с агрегатом пассивного КА СтМ смещается относительно своего полностью выдвинутого положения, при этом штоки входят в корпуса штанг и пружины временно сжимаются. После завершения демпфирования энергии сближения активного КА силы сжатия пружин штанг постепенно возвращают штоки и СтМ в полностью выдвинутое положение. Далее по команде блока управления электропривод начинает вращать барабан в направлении уменьшения длины свободных тросов и переводит СтМ в полностью втянутое положение.
Недостатками конструкции являются использование поступательных пружин и гидравлических демпферов; невозможность быстрого выдвижения кольца вперед для улучшения условий сцепки.
Поступательные пружины, выравнивающие СтМ относительно его продольной оси, имеют большие габариты, а гидравлические поступательные демпферы плохо приспособлены для эксплуатации в условиях космического вакуума, так как подвержены протечкам жидкости через уплотнители. Быстрое выдвижение кольца вперед из некоторого промежуточного невозможно из-за того, что переднее положение кольца уже соответствует максимально выдвинутым штокам штанг.
Техническим результатом предлагаемого изобретения является упрощение конструкции периферийного стыковочного механизма и улучшение условий для сцепки за счет уменьшения его инерционности.
Технический результат достигается тем, что в периферийном стыковочном механизме (СтМ), содержащем стыковочное кольцо с направляющими выступами и установленными на них корпусами механизмов защелок для сцепки; штанги, установленные с возможностью движения независимо друг от друга, в которых штоки, первым своим концом связанные вращательными шарнирами со стыковочным кольцом, установлены с возможностью поступательного перемещения вдоль продольных осей корпусов штанг, основания которых связаны вращательными шарнирами с корпусом стыковочного агрегата; а также электропривод вращения барабана намотки тросов, при этом каждый трос через направляющий ролик и пружину компенсации разности длин тросов соединен с корпусом механизма защелок на одном из направляющих выступов стыковочного кольца, в отличие от прототипа, на втором конце каждого штока, входящем в корпус штанги, установлен шарико-винтовой преобразователь, а внутри корпуса штанги, со стороны его основания, связанного вращательным шарниром с корпусом агрегата, установлен винт с возможностью вращения относительно продольной оси корпуса штанги, который с одной стороны образует соосное зацепление с шарико-винтовым преобразователем подвижного штока, а с другой стороны связан через паразитную шестерню с валом, по меньшей мере, одного пружинного механизма кручения, установленного снаружи корпуса штанги соосно с входным валом храпового механизма, выходной вал храпового механизма соединен соосно с электромагнитной фрикционной муфтой и через понижающий редуктор с входным валом устройства контактного.
Сущность изобретения поясняется следующими чертежами:
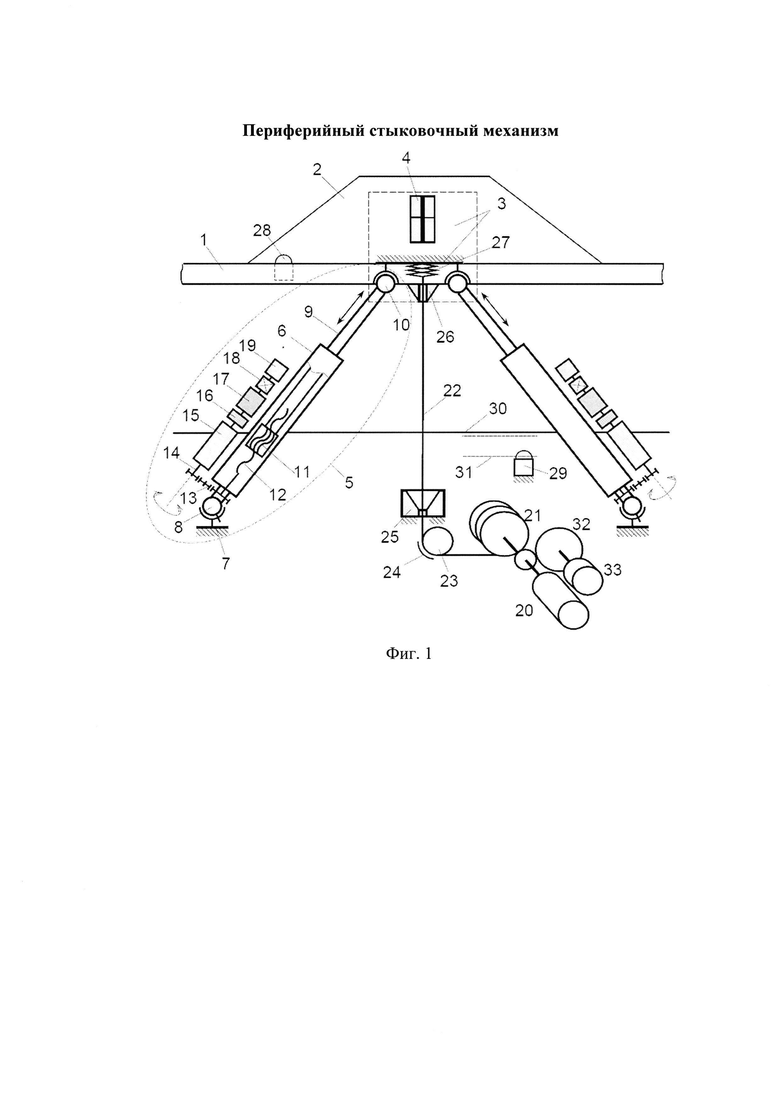
фиг. 1 - упрощенная кинематическая схема пары штанг стыковочного механизма;
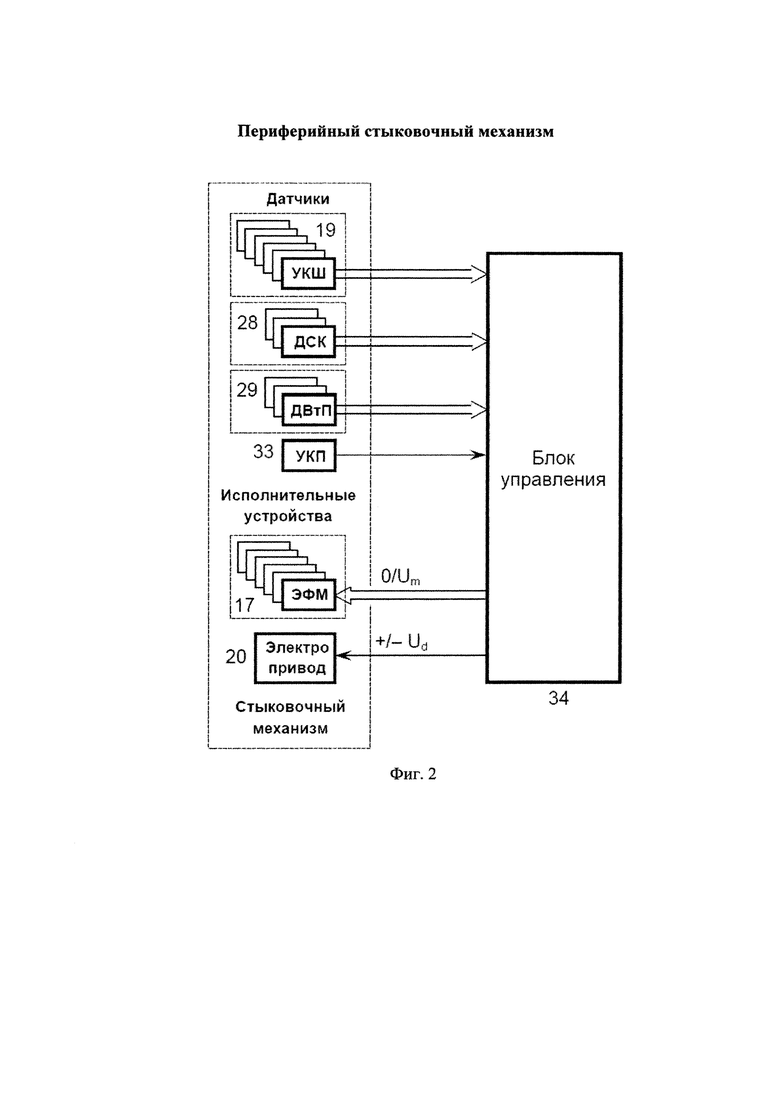
фиг. 2 - обобщенная схема системы управления стыковочным механизмом;
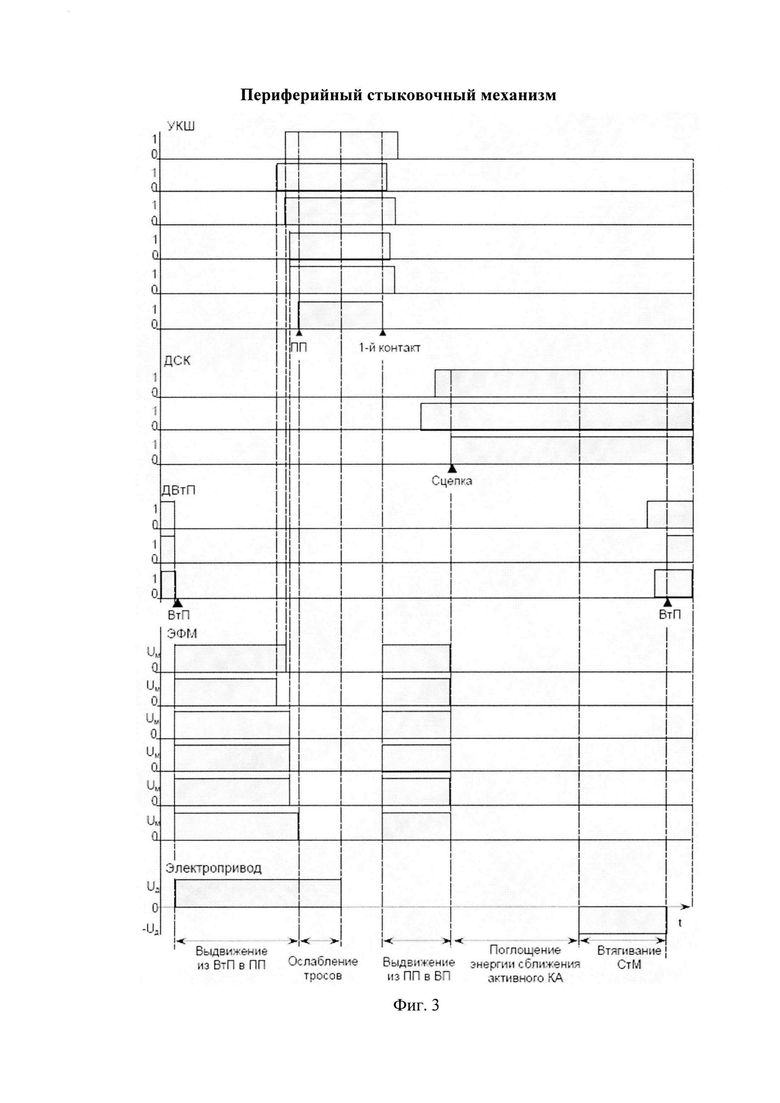
фиг. 3 - циклограмма работы стыковочного механизма.
Основными элементами стыковочного механизма (СтМ), которые показаны на фиг. 1 и 2, являются стыковочное кольцо 1 с направляющими выступами 2 и установленными на них корпусами 3 механизмов защелок 4; шесть штанг 5, двигающихся независимо друг от друга, корпуса 6 которых связаны с корпусом 7 стыковочного агрегата вращательным шарнирами 8; в каждой штанге 5 установлен шток 9 с возможностью поступательного перемещения относительно корпуса 6 штанги, первый конец которого связан вращательным шарниром 10 со стыковочным кольцом 1, а на втором его конце, входящем в корпус 6, установлен шарико-винтовой преобразователь (ШВП) 11; винт 12, установленный внутри корпуса 6 с возможностью вращения относительно его продольной оси и с одной стороны образует соосное зацепление с ШВП 11 подвижного штока 9, а с другой связан паразитной шестерней 13 с валом 14 пружинного механизма (ПМ) кручения 15, установленного снаружи корпуса 6 штанги соосно с входным валом храпового механизма 16, выходной вал которого соединен соосно с электромагнитной фрикционной муфтой (ЭФМ) 17 и через понижающий редуктор 18 с входным валом устройства контактного штанги (УКШ) 19; электропривод 20, на выходном валу которого закреплен барабан 21, на который наматываются три троса 22, каждый трос 22 подается с барабана на направляющий ролик 23 с направляющим устройством 24, предотвращающим образование петли, проходит через конические направляющие устройства 25 и 26 для выравнивания стыковочного кольца относительно агрегата, установленные на корпусе 7 агрегата и на кольце 1, и соединяется через пружину компенсации разности длин тросов (например, пружину Белльвилля) 27 с корпусом 3 механизма защелок 4, установленным на направляющем выступе 2 кольца 1; контактные датчики совмещения колец (ДСК) 28, установленные на кольце 1 рядом с его направляющими выступами 2; датчики втянутого положения (ДВтП) 29, установленные на корпусе 7 агрегата ниже его стыковочной плоскости 30, но выше плоскости 31, проходящей через нижнюю кромку кольца 1 во втянутом положении СтМ; устройство контактное электропривода (УКП) 33, соединенное через понижающий редуктор 32 с валом электропривода 20, а также блок управления 34, получающий сигналы с УКШ 19, ДСК 28, ДВтП 29 и УКП 33, и подающий управляющие напряжения Um на ЭФМ 17 и на электропривод 20.
В качестве ПМ кручения 15 может быть использован ПМ одностороннего действия, описанный на стр. 173-174 и рис. 6.5 в книге B.C. Сыромятников. Стыковочные устройства космических аппаратов. - М.: Машиностроение, 1984.
Храповой механизм 16 торцевого типа реализуется по схеме, приведенной на рис. 7, стр. 221 в книге Neil Sclatter. Mechanism and mechanical devices sourcebook. Fifth edition, McGraw Hill, 2011, 546 p.
Электромагнитная фрикционная муфта 17 может быть реализована по схеме, описанной в патенте РФ №116195, опубликованном 20.05.2012 (Деулин К.Н.)
УКШ 19 может быть реализовано аналогично блоку концевых контактов привода, описанному на стр. 100 и рис. 3.15 в B.C. Сыромятников. Стыковочные устройства космических аппаратов. - М.: Машиностроение, 1984.
Блок управления подачей команд на электропривод и электромагнитные фрикционные муфты штанг может переводить СтМ в три различных положения - втянутое положение (ВтП), промежуточное положение (ПП) и выдвинутое положение (ВП). Во втянутом положении все штоки 9 полностью втянуты в корпусы 6 штанг 5, а плоскость стыковочного кольца 1 находится ниже стыковочной плоскости 30 агрегата. В выдвинутом положении СтМ все штоки 9 полностью выдвинуты из корпусов 6 штанг 5, а стыковочное кольцо 1 находится на максимальном удалении от стыковочной плоскости 30 агрегата. В промежуточном положении величина выдвижения штоков 9 из корпусов 6 штанг 5 определяется исходя из способности СтМ демпфировать заданную величину энергии сближения активного КА.
Блок управления 34 реализует логику в соответствии с приведенной на фиг. 3 циклограммой, в которой 1 означает наличие сигнала, а 0 - его отсутствие, и обеспечивает следующую последовательность функционирования СтМ.
Перед стыковкой СтМ находится во втянутом положении. Блок управления выдает сигналы на включение ЭФМ 17 штанг и сигнал на электропривод 20 для вращения барабана 21 в направлении размотки тросов 22 для увеличения их свободных длин между коническими направляющими устройствами 25 и 26 и перевода СтМ из втянутого положения в промежуточное положение. Включенные ЭФМ 17 снимают блокировку вращения выходных валов храповых механизмов 18 и тем самым разрешают вращение валов 14 ПМ 15 в направлении ослабления пружин и выдвижения штоков 9 из корпусов 6 штанг 5. В результате увеличения свободных длин тросов 22 и выдвижения штоков 9 штанг стыковочное кольцо 1 движется вдоль продольной оси СтМ в направлении удаления от стыковочной плоскости 30 агрегата. После начала этого движения значения ДВтП 29 обнуляются. В каждой штанге 5 при достижении длины выдвинутого из корпуса 6 штока 9, соответствующей промежуточному положению, УКШ 19 подает сигнал в блок управления 34, который в ответ выключает ЭФМ 17 этой штанги, блокируя вращение выходного вала храпового механизма 16 и соответственно вала 14 ПМ 15 в направлении ослабления пружины и выдвижения штока 9. После выключения ЭФМ 17 всех штанг блок управления фиксирует достижение промежуточного положения СтМ. При этом электропривод 20 продолжает вращать барабан 21 в направлении размотки тросов 22, увеличивая их свободную длину, то есть ослабляя тросы. При достижении максимально допустимой свободной длины тросов, соответствующей выдвинутому положению СтМ, УКП 33 подает сигнал об этом в блок управления 34, который в ответ выключает электропривод 20.
При стыковке первый контакт между стыковочным кольцом 1 и пассивным агрегатом приводит к уменьшению длины выходящего из корпуса 6 штока 9 хотя бы одной из штанг 5 и к обнулению сигнала в ее УКШ 19. Блок управления при обнулении сигнала хотя бы одного УКШ 19 подает сигналы на включение ЭФМ 17 всех штанг 5, что приводит к разблокировке выходных валов храповых механизмов 16 и вращению валов 14 ПМ 15 в направлении ослабления пружин и к выдвижению штоков 9 из корпусов 6 всех штанг 5 и к выдвижению стыковочного кольца 1.
При получении сигналов от всех (минимум трех) датчиков совмещения колец (ДСК) блок управления запоминает состояние «Сцепка» и выключает ЭФМ 17 всех штанг 5, что приводит к блокировке вращения выходных валов храповых механизмов 16 и блокировке вращения валов 14 ПМ 15 в направлении ослабления пружин и увеличения длин штоков 9, выходящих из корпусов 6 штанг 5. После этого ПМ 15 только поглощают энергию сближения активного КА, противодействуя только уменьшению длин штоков 9, выходящих из корпусов 6 штанг 5.
Через фиксированный интервал времени (не менее 30 сек) после запоминания состояния «Сцепка», достаточный для поглощения основной части энергии сближения активного КА, блок управления 34 подает сигнал на электропривод 20 для вращения барабана 21 в направлении намотки тросов 22. Намотка тросов 22 на барабан 21 приводит к уменьшению их свободной длины и к сближению стыковочного кольца 1 и стыковочной плоскости 30 агрегата 7. При этом стыковочное кольцо 1 через вращательные шарниры 10 давит на штоки 6 штанг 5, заставляя их втягиваться в корпусы 6 и через ШВП 11 вращать винты 12, которые через шестерню 13 передают вращение на валы 14 ПМ 15 и закручивают их пружины, при этом храповые механизмы 16, выходные валы которых зафиксированы выключенными ЭФМ 17, блокируют вращение валов 14 ПМ 15 в направлении ослабления их пружин.
При полном втягивании штоков 9 в корпусы 6 всех штанг 5 стыковочное кольцо 1 пересекает стыковочную плоскость 30 агрегата 7 и полностью располагается за ней со стороны шарниров 8. При этом его задняя поверхность обжимает ДВтП 29 на корпусе 7 агрегата. Блок управления 34 после получения сигналов со всех трех ДВтП 29 выключает электропривод 20.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПИРАЛЬНЫЙ ПРУЖИННЫЙ МЕХАНИЗМ | 2017 |
|
RU2682028C1 |
| УСТРОЙСТВО СТЯГИВАНИЯ СТЫКОВОЧНЫХ АГРЕГАТОВ КОСМИЧЕСКИХ АППАРАТОВ | 2018 |
|
RU2706640C1 |
| УСТРОЙСТВО СТЯГИВАНИЯ ПЕРИФЕРИЙНОГО СТЫКОВОЧНОГО МЕХАНИЗМА | 2018 |
|
RU2706741C1 |
| СТЫКОВОЧНЫЙ МЕХАНИЗМ КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2662605C2 |
| СТЫКОВОЧНЫЙ МЕХАНИЗМ КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2706639C2 |
| АКТИВНОЕ УСТРОЙСТВО ФИКСАЦИИ ПОЛЕЗНОГО ГРУЗА ПРЕИМУЩЕСТВЕННО К КОРПУСУ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2014 |
|
RU2583993C2 |
| СТЫКОВОЧНОЕ УСТРОЙСТВО ПРЕИМУЩЕСТВЕННО ДЛЯ КОСМИЧЕСКИХ ОБЪЕКТОВ | 2000 |
|
RU2191149C2 |
| МЕХАНИЗМ ЗАЩЁЛОК | 2020 |
|
RU2762967C1 |
| АНДРОГИННЫЙ ПЕРИФЕРИЙНЫЙ АГРЕГАТ СТЫКОВКИ (АПАС) И ДЕМПФЕР АМОРТИЗАЦИОННО- ПРИВОДНОЙ СИСТЕМЫ ДЛЯ НЕГО | 1998 |
|
RU2131829C1 |
| ОГРАНИЧИТЕЛЬ СКОРОСТИ ОТНОСИТЕЛЬНОГО ДВИЖЕНИЯ | 2020 |
|
RU2739646C1 |
Изобретение относится к космической технике. Периферийный стыковочный механизм (СтМ) содержит стыковочное кольцо с направляющими выступами и корпусами механизмов защелок для сцепки; штанги со штоками, установленными с возможностью поступательного перемещения вдоль продольных осей корпусов штанг; электропривод вращения барабана намотки тросов. Каждый трос через направляющий ролик и пружину компенсации разности длин тросов соединен с корпусом механизма защелок на одном из направляющих выступов стыковочного кольца. Внутри корпуса штанги со стороны его основания установлен винт с возможностью вращения относительно продольной оси корпуса штанги. Винт с одной стороны образует соосное зацепление с шарико-винтовым преобразователем подвижного штока, а с другой - связан через паразитную шестерню с валом, по меньшей мере, одного пружинного механизма кручения, установленного снаружи корпуса штанги соосно с входным валом храпового механизма. Выходной вал храпового механизма соединен соосно с электромагнитной фрикционной муфтой и через понижающий редуктор с входным валом устройства контактного. Техническим результатом изобретения является упрощение конструкции периферийного СтМ и уменьшение его инерционности. 3 ил.
Периферийный стыковочный механизм, содержащий стыковочное кольцо с направляющими выступами и установленными на них корпусами механизмов защелок для сцепки; штанги, установленные с возможностью движения независимо друг от друга, в которых штоки, первым своим концом связанные вращательными шарнирами со стыковочным кольцом, установлены с возможностью поступательного перемещения вдоль продольных осей корпусов штанг, основания которых связаны вращательными шарнирами с корпусом стыковочного агрегата; а также электропривод вращения барабана намотки тросов, при этом каждый трос через направляющий ролик и пружину компенсации разности длин тросов соединен с корпусом механизма защелок на одном из направляющих выступов стыковочного кольца, отличающийся тем, что на втором конце каждого штока, входящем в корпус штанги, установлен шарико-винтовой преобразователь, а внутри корпуса штанги, со стороны его основания, связанного вращательным шарниром с корпусом агрегата, установлен винт с возможностью вращения относительно продольной оси корпуса штанги, который с одной стороны образует соосное зацепление с шарико-винтовым преобразователем подвижного штока, а с другой стороны связан через паразитную шестерню с валом, по меньшей мере, одного пружинного механизма кручения, установленного снаружи корпуса штанги соосно с входным валом храпового механизма, выходной вал храпового механизма соединен соосно с электромагнитной фрикционной муфтой и через понижающий редуктор с входным валом устройства контактного.
| US 9302793 B2, 05.04.2016 | |||
| АНДРОГИННЫЙ ПЕРИФЕРИЙНЫЙ АГРЕГАТ СТЫКОВКИ (АПАС) И ДЕМПФЕР АМОРТИЗАЦИОННО- ПРИВОДНОЙ СИСТЕМЫ ДЛЯ НЕГО | 1998 |
|
RU2131829C1 |
| Стыковочный агрегат летательного аппарата | 1990 |
|
SU1744003A1 |
| АГРЕГАТ СТЫКОВОЧНЫЙ ПАССИВНЫЙ | 2007 |
|
RU2349517C1 |

