Изобретение относится к контрольно-измерительной технике и может быть использовано в системах автоматического управления и контроля, например в производстве интегральных и больших интегральных схем, в робототехнике и т. д.
Известен электростатический преобразователь угловых перемещений (см. В. Г. Домрачев "Схемотехника цифровых преобразователей перемещений", М. , "Энергоатомиздат", 1987 г. , стр. 65), представляющий собой емкостный фазовращатель, принцип действия которого основан на эффекте периодического изменения емкости в зависимости от угловых перемещений. Данный преобразователь содержит n одинаковых электростатических генераторов, причем n ≥2, в каждом из которых на смежных, обращенных друг к другу поверхностях соосных цилиндров нарезано одинаковое число зубцов и впадин или электропроводные участки чередуются с участками из диэлектрика. Роторы всех n генераторов конструктивно объединены между собой и электрически соединены с корпусом преобразователя, а к каждому из статоров через резистор подведено постоянное напряжение. Ротор и статор каждого генератора разделены воздушным промежутком и образуют конденсатор, емкость которого зависит от взаимного расположения зубцов или электропроводных участков.
При перемещении роторов происходит периодическое изменение емкости преобразователя в соответствии с законом амплитудной модуляции перемещением с последующим преобразованием в электрический сигнал. Амплитуда этих изменений составляет, как правило, несколько пикофарад (10-20 пФ). Один из генераторов, ротор которого неподвижен, служит для формирования сигнала опорной фазы. Роторы остальных (n-1) генераторов являются подвижными. В этом случае при повороте подвижного статора на некоторый угол относительно неподвижного происходит сдвиг фазы напряжения. Пространственный сдвиг фаз статоров отражается в фазовом сдвиге двух или нескольких синусоидальных напряжений. Конструктивно данный электростатический преобразователь может быть выполнен не только цилиндрическим, но и плоским. В случае плоской конструкции пластины статора расположены в одной плоскости. Число их и их соединения аналогичны цилиндрическому исполнению конструкции. Ротор каждого из генераторов выполнен в виде фигурной пластины и расположен соосно и параллельно статору. Профиль ротора выполнен фигурным для соблюдения закона изменения емкости.
Недостатком таких электростатических преобразователей являются большое входное сопротивление, необходимость в жесткой герметизации корпуса, трудность исключения влияния паразитных емкостей.
Наиболее близким аналогом по технической сущности является индукционный датчик угловых перемещений (см. Л.Н.Сафонов "Прецизионные датчики угла", М., Машиностроение, 1977 г.).
Известный индукционный датчик угловых перемещений содержит ротор и статор в виде дисков, выполненных из диэлектрического материала, расположенных соосно, плоскопараллельно и с воздушным зазором относительно друг друга. На поверхностях дисков, обращенных друг к другу, размещены печатные обмотки в виде индуктосина. При подключении обмотки статора к источнику переменного напряжения в пространстве, окружающем обмотку, возникает переменное электромагнитное поле и в каждом витке обмотки ротора индуктируется ЭДС в зависимости от угла поворота ротора относительно статора.
Основными недостатками индукционного датчика угловых перемещений являются следующие:
- низкий уровень выходной ЭДС, что не позволяет обеспечить высокую точность измерений и, как следствие, необходимость повышенных мер помехозащиты;
- недостаточное быстродействие вследствие конструктивных ограничений, низких частот питающих напряжений;
- наличие дискретных (периодических) контактов объема выходных сигналов с вращающегося ротора, что не обеспечивает достоверности измерений в каждый момент изменения угла вращения. Наличие контакта с вращающимся элементом датчика - ротором значительно снижает надежность работы.
В настоящее время актуальной задачей является обеспечение измерения углового перемещения в каждый момент времени или в реальном моменте времени изменения угла поворота объекта вращения. В рамках поставленной задачи был разработан быстродействующий датчик угловых перемещений.
Технический результат, достигнутый при осуществлении заявляемого датчика угловых перемещений, - повышение точности, быстродействия и достоверности измерения в момент углового перемещения объекта, а также повышение надежности работы датчика за счет обеспечения бесконтактного съема выходного параметра с вращающегося ротора.
Достижение результата обеспечивается за счет того, что датчик угловых перемещений содержит ротор и статор в виде дисков, выполненных из диэлектрического материала, расположенных соосно, плоскопараллельно и с воздушным зазором относительно друг друга. На поверхностях дисков, обращенных друг к другу, размещены микрополосковые линии связи в виде равномерно распределенных и радиально расположенных конфигураций. Микрополосковые линии связи давно используются в различных микроэлектронных устройствах. Однако до сих пор микрополосковые линии связи представляли собой жесткую механическую конструкцию с фиксированными электродинамическими параметрами (неизменяющимися в процессе работы). Выполнение связанных микрополосковых линий на двух механических частях, одна из которых подвижна (ротор), а другая неподвижна (статор), позволяет обеспечить возможность модуляции электродинамических параметров микрополосковых линий связи.
Статор содержит обмотки двух видов: в виде разомкнутого индуктосина U-образной формы, имеющего выводы для подключения питающего(их) генератора(ов) и регистрирующего устройства и образующего канал точного отсчета (ТО), и в виде разорванного(ых) кольца(колец), также имеющего(их) выводы для подключения питающего(их) генератора(ов) и регистрирующего устройства и образующего канал грубово отсчета (ГО). Ротор также имеет обмотки двух видов: в виде замкнутого(ых) индуктосина(ов) U-образной формы и в виде разорванного(ых) кольца(колец). Ротор соединен соосно и жестко с валом вращения, соединенным с объектом измерения. Каждая из конфигураций обмоток ротора и статора представляет собой связанную микрополосковую линию передач. Необходимое количество обмоток ротора и статора выбирается исходя из требований, предъявляемых к точности и быстродействию датчика угловых перемещений. На обратной стороне дисков ротора и статора сформированы металлизированные плоские экраны.
В сравнении с ближайшим аналогом-прототипом предлагаемое изобретение характеризуется следующими отличительными признаками:
- конфигурации обмоток статора и ротора представляют собой связанные микрополосковые линии передач, выполненные на двух механических частях, одна из которых подвижна (ротор), а другая неподвижна (статор);
- статор содержит обмотки двух видов: в виде разомкнутого индуктосина U-образной формы, имеющего выводы для подключения питающего(их) генератора(ов) и регистрирующего устройства, и в виде разорванного(ых) кольца(колец), также имеющего(их) выводы для подключения питающего(их) генератора(ов) и регистрирующего устройства;
- ротор также имеет обмотки двух видов: в виде замкнутого(ых) индуктосина(ов) U-образной формы и в виде разорванного(ых) кольца(колец);
- необходимое количество обмоток ротора и статора выбирается исходя из требований, предъявляемых к точности и быстродействию датчика угловых перемещений;
- на оборотной стороне каждого из дисков ротора и статора сформированы металлизированные плоские экраны.
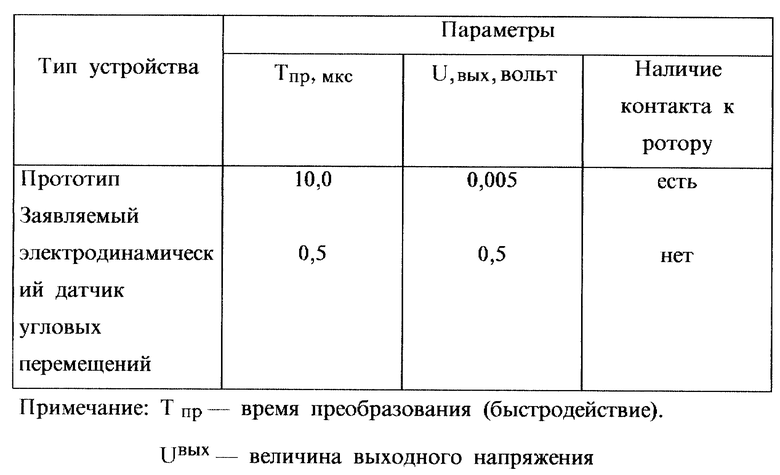
Использование связанных микрополосковых линий передач в качестве обмоток, размещенных на поверхностях статора и ротора датчика, позволяет использовать электродинамический принцип действия, что обеспечивает возможность модуляции электродинамических параметров микрополосковых линий передач в зависимости от угла поворота ротора относительно статора. Кроме того, достигается существенное увеличение электромагнитной связи между ротором и статором, что позволяет увеличить выходное напряжение, а соответственно и точность измерения более чем в 100 раз, а возможность использования более высокой рабочей частоты увеличивает быстродействие более чем в 10 раз.
Измерение изменения электродинамических параметров, например волнового сопротивления, позволяет осуществлять съем выходного сигнала с вывода обмотки статора, что позволяет фиксировать изменение углового перемещения в каждый момент времени, что обеспечивает повышение достоверности измерения. Кроме того, обеспечение бесконтактного съема выходного сигнала с вращающегося ротора датчика повышает надежность его работы.
Таким образом, вышеперечисленные отличительные признаки в совокупности с известными признаками позволяют устранить недостатки, присущие прототипу, и обеспечить повышение быстродействия и достоверности измерения, а также повышение надежности работы датчика.
Представленный на чертеже двухотсчетный(двухобмоточный) датчик угловых перемещений содержит статор А и ротор В в виде двух дисков, выполненных из диэлектрического материала 1, расположенных соосно, плоскопараллельно и с воздушным зазором относительно друг друга. На поверхностях дисков, обращенных друг к другу, размещены обмотки 2 и 5 в виде равномерно распределенных и радиально расположенных конфигураций, которые представляют собой связанные микрополосковые линии передач. Обмотки 2 статора образуют канал точного отсчета (ТО), а обмотки 5 статора - канал грубого отсчета (ГО). Обмотка 2 статора выполнена в форме разомкнутых индуктосинов U-образной формы, содержит два вывода, один из них 9 служит для подключения питающего генератора переменного напряжения (входа электромагнитной волны), другой 6 - для подключения к регистрирующему устройству. Обмотка 5 статора содержит два вывода: один из них 7 служит для подключения питающего генератора переменного напряжения (входа электромагнитной волны), другой 8 - для подключения к регистрирующему устройству. Ротор также имеет две обмотки. Обмотка ротора 2 представляет собой замкнутую микрополосковую линию связи в виде индуктосина U-образной формы, а обмотка 5 выполнена в виде разорванного кольца. Ротор через отверстие 4 в диске соединен соосно и жестко с валом вращения. На оборотной стороне дисков статора A и ротора B сформированы металлизированные плоские экраны 3.
Датчик угловых перемещений работает следующим образом.
При подключении питающего генератора к выводу 9 обмотки 2 на статор А поступает переменное напряжение. При повороте ротора В относительно статора А изменяется взаимное расположение связанных микрополосковых линий, расположенных на роторе и статоре, что вызывает изменение их электродинамических параметров (волновое сопротивление, коэффициент отражения и др.). Электромагнитная волна, подаваемая в обмотки 2 и 5 статора А через один из выводов 9, связанных микрополосковой линией от внешнего генератора, изменяет свою амплитуду и фазу в зависимости от электродинамических параметров связанных микрополосковых линий, т.е. от угла поворота ротора В относительно статора А. Изменения амплитуды и фазы электромагнитной волны, прошедшей через датчик, затем измеряются и обрабатываются внешним устройством, подключаемым к выводу 6. Т.е. производится отсчет угла поворота ротора относительно статора.
Предлагаемый датчик угловых перемещений реализован следующим образом (пример конкретного выполнения).
В круглых ситалловых пластинах (ротор и статор) механическим способом формируются осевые отверстия под вал в роторе В и отверстие большего диаметра, чем диаметр вала в статоре А. На обе стороны ситалловых пластин статора и ротора наносятся, например, методом трафаретной печати толстопленочные проводящие слои. На одной из сторон ситалловых пластин статора А и ротора В с нанесенными проводящими слоями трафаретом формируются рисунки соответственно статора А и ротора В (см. чертеж). Пластина ротора В со сплошным слоем 3 металлизации на одной стороне и микрополосковой линией связи в виде индуктосина U-образной формы на другой стороне жестко крепится на вал (плоскость поверхности пластины перпендикулярна оси вала). Пластина статора А со сплошным слоем 3 металлизации на одной стороне и конфигурацией в форме индуктосина 2 на другой жестко крепится внутрь цилиндрического стакана корпуса на дно (сплошной слой обращен в сторону дна цилиндра), по оси которого запрессован концевой подшипник под вал ротора. Производится распайка контактных площадок статора А коаксиальным кабелем, который собирается в жгут и выводится наружу через отверстие в дне стакана корпуса. Вал ротора запресовывается в подшипник крышки стакана корпуса, установленный по его оси. Другой конец вала ротора опускается внутрь цилиндра корпуса и крепится в концевом подшипнике, укрепленном в дне стакана корпуса. Поверхности пластин статора и ротора обращены друг к другу металлизированными обмотками. Крыша корпуса жестко крепится к цилиндрическому стакану. В результате проведенных технологических операций получаем предлагаемое устройство.
Результаты измерений электрических параметров и конструктивные характеристики предлагаемого датчика угловых перемещений в сравнении с прототипом представлены в таблице.
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик положения ротора | 2023 |
|
RU2816167C1 |
| Датчик углового положения | 1979 |
|
SU887921A1 |
| Индуктосин | 1975 |
|
SU555516A1 |
| МАГНИТОЭЛЕКТРИЧЕСКИЙ ГЕНЕРАТОР КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ | 2008 |
|
RU2368056C1 |
| Устройство для двухканальной дистанционнойпЕРЕдАчи углА | 1979 |
|
SU851672A1 |
| Двухфазный емкостной преобразователь угла | 1981 |
|
SU1030825A1 |
| Датчик положения - многоотсчетныйиНдуКТОКОР | 1977 |
|
SU817892A1 |
| ТРАНСФОРМАТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2011 |
|
RU2480710C2 |
| СИСТЕМА БЕСПЕРЕБОЙНОГО И ГАРАНТИРОВАННОГО ЭЛЕКТРОСНАБЖЕНИЯ ДЛЯ НАИБОЛЕЕ ОТВЕТСТВЕННЫХ ПОТРЕБИТЕЛЕЙ ЭЛЕКТРОЭНЕРГИИ | 2012 |
|
RU2518907C1 |
| Бескорпусная синхронная вращающаяся электрическая машина с индукционным датчиком углового положения | 2022 |
|
RU2779627C1 |
Изобретение относится к измерительной технике и предназначено для использования в системах автоматического управления и контроля. Датчик содержит расположенные соосно, плоскопараллельно и с воздушным зазором статор и ротор, выполненные в виде диэлектрических дисков. На обращенных друг к другу поверхностях дисков сформированы конфигурации из плоских проводников, причем на статоре - в виде разомкнутой обмотки с проводниками U-образной формы и разорванного(ых) кольца (колец), выводы которых подключены к соответствующим питающим генераторам и узлам регистрации, а на роторе - в виде замкнутой(ых) обмотки (обмоток) с проводниками U-образной формы и разорванного(ых) кольца (колец). Отличие предложенного датчика от известных заключается в том, что конфигурации обмоток статора и ротора представляют собой связанные микроволновые линии передачи с электродинамическими параметрами, зависящими от величины угла поворота ротора относительно статора. При этом на оборотных сторонах дисков статора и ротора выполнены металлизированные плоские экраны. Датчик характеризуется повышенными быстродействием и достоверностью измерения. 1 табл. 1 ил.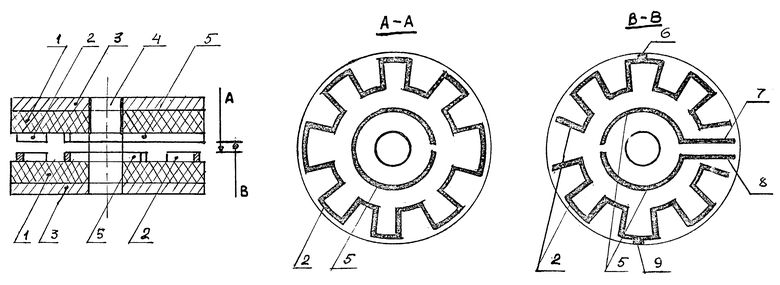
Датчик угловых перемещений, содержащий ротор и статор, представляющие собой диски, выполненные из диэлектрического материала, расположенные соосно, плоскопараллельно и с воздушным зазором между ними, на поверхностях дисков, обращенных друг к другу, сформированы рисунки из плоских проводников, отличающийся тем, что, с целью повышения быстродействия, величины выходного сигнала, обеспечения бесконтактного съема выходного сигнала с вращающегося ротора за счет увеличения электродинамической связи и высокой рабочей частоты устройства, в нем на основе плоских проводников ротора и статора сформированы связанные микрополосковые линии передачи, электродинамические параметры которых зависят от величины угла поворота ротора относительно статора.
| Сафонов Л.Н | |||
| и др | |||
| Прецизионные датчики угла с печатными обмотками | |||
| - М.: Машиностроение, 1977, с.7-15 | |||
| Индукционный датчик угловых перемещений | 1990 |
|
SU1744442A1 |
| Индукционный преобразователь угловых перемещений | 1985 |
|
SU1272102A1 |
