Предлагаемое изобретение относится к области измерительной техники и может быть использовано для высокоточных измерений угловых перемещений различных поворотных устройств.
Известны вращающиеся трансформаторы (ВТ) - электрические машины переменного тока, преобразующие угол поворота ротора θ в напряжение, пропорциональное этому углу θ или его функциям sin θ, cos θ и др. (Брускин Д.Э., Зорохович А.Е., Хвостов B.C. Электрические машины и микромашины - М.: Высшая школа, 1981. 432 с., стр. 212-224).
На статоре и роторе размещают по две одинаковые однофазные распределенные обмотки, сдвинутые между собой в пространстве на 90°, магнитопроводы статора и ротора изготавливают из листов электротехнической стали, изолированных друг от друга. Одну из обмоток статора (или обе) присоединяют к сети переменного тока. При вращении ротора с обмоток ротора, начала и концы которых выведены на контактные кольца или спиральные пружины токосъема, получают напряжение, пропорциональное углу θ, sin θ или cos θ. Аналоговые ВТ получили наиболее широкое распространение на различных технических объектах с поворотными устройствами.
Недостатком аналоговых ВТ является наличие магнитопроводов статора и ротора, обуславливающих существенные габариты и массу аналоговых ВТ, а также низкая точность измерения угла поворота.
Известен емкостной преобразователь угловых перемещений (патент RU 67705 U1, опубл. 27.10.2007), содержащий неподвижную пластину статора и подвижную пластину ротора, выполненные в виде дисков из диэлектрического материала, на которых расположены токопроводящие дорожки и обкладки шкал грубого и точного отсчета. На пластине статора преобразователя расположены четыре секционированные дорожки точного отсчета и четыре обкладки грубого отсчета. На пластине ротора преобразователя, установленной по отношению к пластине статора в параллельной плоскости и с возможностью перемещения в направлении изменения площади взаимного перекрытия обкладок, расположена дорожка грубого отсчета и секционированная дорожка точного отсчета. В преобразователе угловых перемещений выходы всех дорожек соединены с преобразователем емкость-код, интерфейсный выход преобразователя является цифровым выходом датчика угла и обеспечивается повышение точности измерения угла поворота.
Недостатком указанного преобразователя является последовательный опрос текущих значений кодов точного и грубого отсчета, что ограничивает допустимую скорость вращения вала, а также то, что интерфейсный выход преобразователя емкость-код не является взаимозаменяемым с входными напряжениями и выходными сигналами аналоговых ВТ, стоящих на эксплуатируемых объектах, что не позволяет повысить точность аппаратуры эксплуатируемых объектов путем модернизации ранее выпущенных объектов в полевых условиях простой заменой аналогового ВТ и требует дополнительной доработки внутренней аппаратуры эксплуатируемых объектов в заводских условиях.
Известен емкостной преобразователь угловых перемещений (патент RU №2724150 С1, опубл. 22.06.2020). Емкостной преобразователь угловых перемещений содержит выполненные из диэлектрического материала две кольцевые пластины статора и расположенную соосно между ними кольцевую пластину ротора, на которых расположены токопроводящие дорожки и обкладки шкал грубого и точного отсчета, причем пластина ротора жестко закреплена на валу преобразователя, соединенного с перемещающимся объектом, также генератор переменного напряжения, к которому подключена выполненная в виде кольца обкладка одной из пластин статора и электронный блок преобразования и обработки сигналов, к которому подключены приемные обкладки шкал точного и грубого отсчета, расположенные на другой пластине статора. Электронный блок преобразования и обработки сигналов содержит блок буферных усилителей, коммутатор, блок детектирования, блок аналогово-цифрового преобразования и обработки сигналов. Сигналы, снимаемые с приемных обкладок шкалы грубого отсчета, через блок буферных усилителей, коммутатор и блок детектирования подаются на компараторы, на выходе которых формируется цифровой код, соответствующий текущему абсолютному углу поворота ротора. В блоке аналого-цифровой обработки сигналов осуществляется декодирование псевдослучайной последовательности, считываемой с канала грубого отсчета, с последующей «сшивкой» кода со значением, формируемым каналом точного отсчета. Кодовый принцип построения абсолютной шкалы преобразователя позволяет повысить его потенциальную точность.
Недостатками данного преобразователя являются высокая сложность повышения разрешающей способности, а также то, что цифровой код интерфейсного выхода не является взаимозаменяемым с выходными напряжениями ВТ, стоящих на эксплуатируемых объектах, что не позволяет повысить точность аппаратуры эксплуатируемых объектов путем модернизации ранее выпущенных объектов в полевых условиях простой заменой аналогового ВТ и требует дополнительной доработки внутренней аппаратуры эксплуатируемых объектов в заводских условиях.
Наиболее близким по технической сущности является датчик положения ротора (патент RU 2689787 С2, опубл. 29.05.2019), содержащий обмотки статора и ротора, выполненные на печатных платах и сдвинутые между собой в пространстве. Датчик положения ротора преобразует угол поворота ротора в напряжение, пропорциональное функции угла поворота ротора. Напряжение для питания обмотки статора генерируется микроконтроллером, цифровое значение угла поворота ротора определяется с повышенной точностью при помощи электронной схемы обработки, построенной на основе компаратора и микроконтроллера. Выход компаратора подключен к входу микроконтроллера, таймер микроконтроллера начинает отсчет импульсов от поступления на вход логической единицы, т.е. от начала формирования одного положительного полупериода, и прекращает отсчет импульсов при начале формирования микроконтроллером другого положительного полупериода напряжения. Число импульсов, полученное на выходе таймера микроконтроллера, пропорционально угловому положению ротора. Датчик положения ротора передает информацию об угле поворота по цифровому интерфейсу после преобразования ее в десятичный формат.
Недостатком этого устройства является формат цифрового кода интерфейсного выхода, который не является взаимозаменяемым с входными напряжениями и выходными сигналами аналоговых ВТ, стоящих на эксплуатируемых объектах, что не позволяет повысить точность аппаратуры эксплуатируемых объектов путем модернизации ранее выпущенных объектов в полевых условиях простой заменой аналогового ВТ и требует дополнительной доработки внутренней аппаратуры эксплуатируемых объектов в заводских условиях.
Задачей настоящего изобретения является повышение точности аппаратуры эксплуатируемых объектов, обеспечение взаимозаменяемости датчика положения ротора с аналоговым ВТ, обеспечение возможности модернизации ранее выпущенных объектов в полевых условиях заменой аналогового ВТ без дополнительной доработки внутренней аппаратуры эксплуатируемых объектов в заводских условиях.
Технический результат, обусловленный поставленной задачей, достигается тем, что датчик положения ротора, содержащий обмотки статора и ротора, выполненные на печатных платах, микроконтроллер и компаратор, в отличие от известного, содержит цифровой приемник, цифровой передатчик, два двухканальных четырехквадрантных цифро-аналоговых преобразователя, два фильтра низких частот, трансформатор, блок питания, а также дополнительно содержит компаратор и микроконтроллер, при этом выполняются следующие соотношения:

где: Usin, Ucos - выходные сигналы датчика положения ротора, подаваемые на аналоговый вход объекта применения по линии приема от аналогового вращающегося трансформатора;
Um - максимальная амплитуда разрядного числа четырехквадрантных цифро-аналоговых преобразователей;
α - угол поворота ротора;
ω=2π⋅f (f - частота напряжения возбуждения, подаваемого от объекта применения по линии питания аналогового вращающегося трансформатора);
Т - период частоты дискретизации четырехквадрантных цифро-аналоговых преобразователей;
i - дискретные значения времени.
Такой датчик положения ротора обеспечивает взаимозаменяемость датчика положения ротора с аналоговым ВТ, возможность модернизации ранее выпущенных объектов заменой аналогового ВТ без дополнительной доработки внутренней аппаратуры эксплуатируемых объектов с сохранением повышенной точности измерения угла положения ротора.
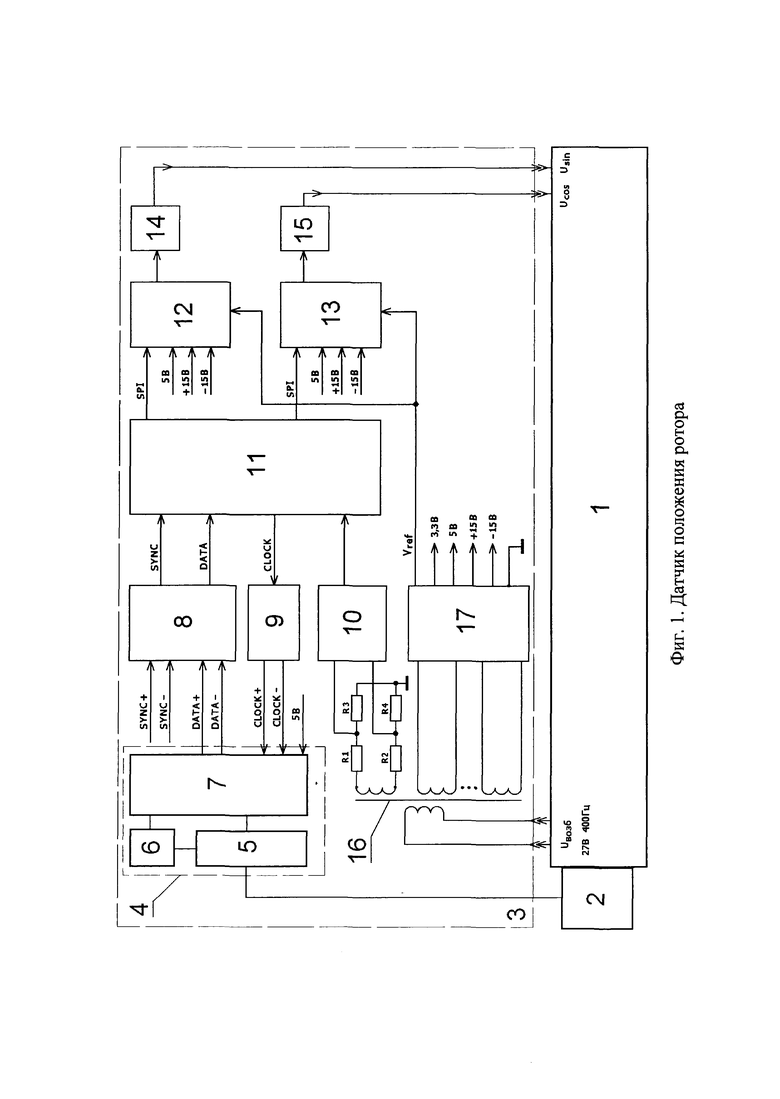
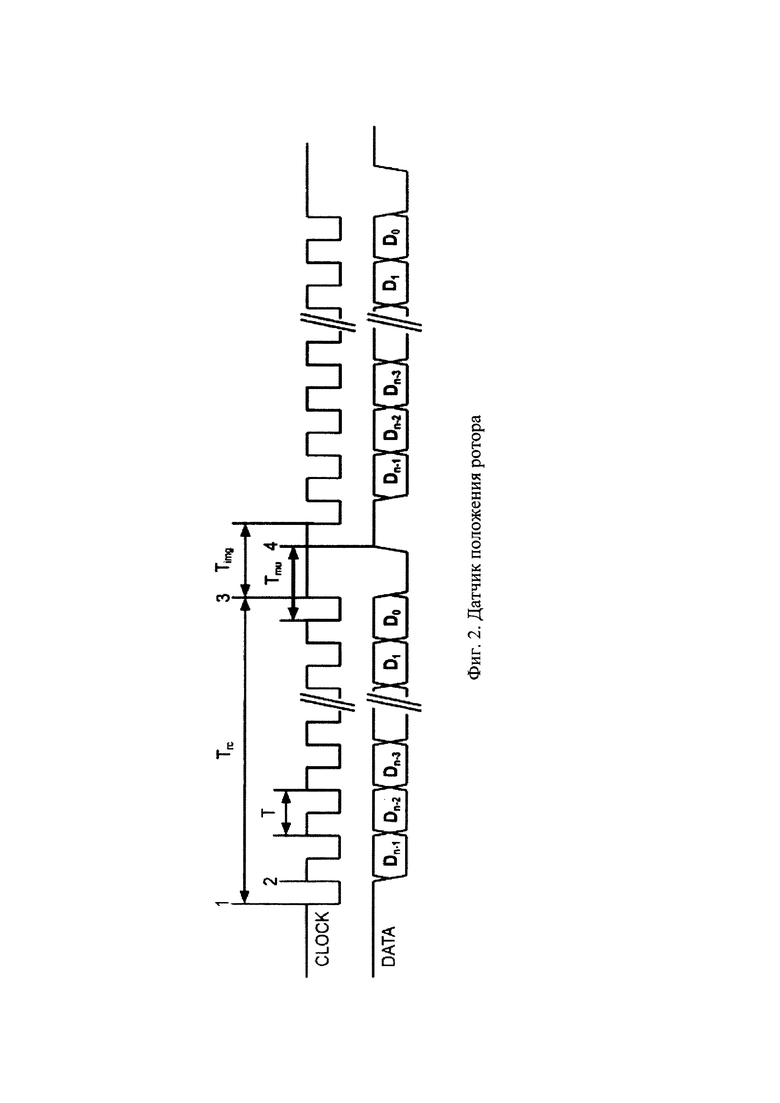
Схема датчика положения ротора и рабочая диаграмма приведены на фигурах 1 и 2.
На фигуре 1 показаны объект применения 1, поворотное устройство 2 объекта применения 1, датчик положения ротора 3, цифровой преобразователь угла 4 со статором и ротором 5, компаратором 6 и микроконтроллером 7, цифровой приемник 8, цифровой передатчик 9, компаратор 10, микроконтроллер 11, четырехквадрантные умножающие цифро-аналоговые преобразователи 12 и 13, фильтры низких частот 14 и 15, трансформатор 16 и блок питания 17. На фигуре 2 показана импульсная диаграмма, формируемая цифровым преобразователем угла, с обозначениями: Т - период импульсов по линии CLOCK; Trc - Real Cycle time, определяется как (n⋅Т)+(0,5⋅Т); Tmu - Message Update time, время после последнего отрицательного фронта тактирования до момента обновления данных о положении; Timg - Intermessage Gap time; n - количество бит в сообщении.
Принцип действия датчика положения ротора заключается в следующем. Объект применения 1 с поворотным устройством 2, использующий ВТ, содержит интерфейсное соединение, вырабатывающее напряжение возбуждения (Uвозб) для аналогового синусно-косинусного ВТ и принимающее аналоговые сигналы (Ucos, Usin) от синусно-косинусного ВТ. Типичным представителем аналогового ВТ является тип «2,5ВТ ЛШО.301.014ТУ» с погрешностью, равной 1'40'' для класса точности 0,05.
Повышение точности измерения угла поворота достигается заменой обмоток и магнитопроводов аналогового ВТ на обмотки статора и ротора 5, выполненные на печатных платах и сдвинутые между собой в пространстве, а цифровое значение угла поворота ротора определяется с повышенной точностью при помощи электронной схемы обработки, построенной на основе компаратора 6 и микроконтроллера 7, имеющего на выходе формат цифрового кода. Однако, такой цифровой преобразователь угла 4 не является взаимозаменяемым с входными напряжениями и выходными сигналами аналогового ВТ на объекте применения 1, что не позволяет модернизировать ранее выпущенные объекты 1 в полевых условиях простой заменой аналогового ВТ и требует дополнительной доработки внутренней аппаратуры объекта применения 1 в заводских условиях.
Обеспечение взаимозаменяемости с аналоговым ВТ и с сохранением повышенной точности измерения угла обеспечивается датчиком положения ротора 3, в котором осуществляется преобразование кода угла поворота цифрового преобразователя угла 4 в аналоговые сигналы, аналогичные сигналам синусно-косинусного ВТ, например, типа 2,5ВТ, и соответствующие текущему углу поворотного устройства 2 и ротора 5.
Вариант цифрового преобразователя угла 4 может быть применен в виде индуктосина типа MF75, параметры которого приведены в таблице 1 (электронный ресурс: www.kubomc.com).
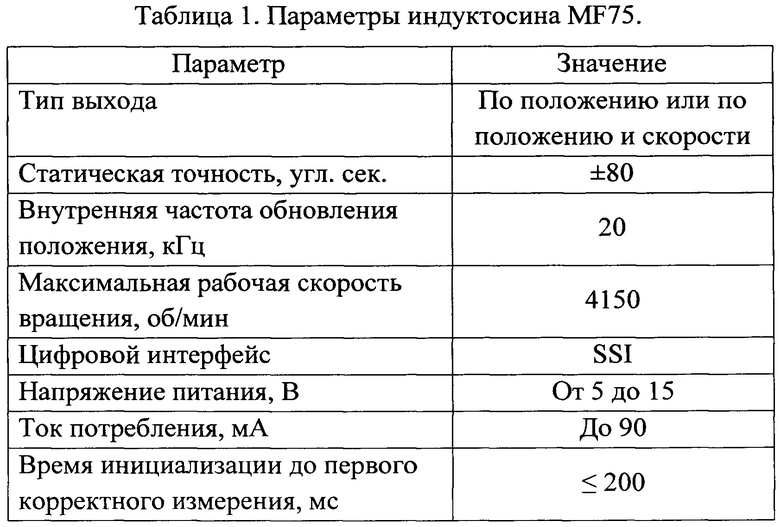
Цифровой преобразователь угла 4 (индуктосин MF75) выдает сигналы SYNC+, SYNC-, DATA+, DATA- на цифровой приемник 8 с интерфейсом RS422 (например, типа 5559ИН17Т), преобразующий дифференциальные сигналы интерфейса SSI в однополярные, которые поступают на выводы входного порта микроконтроллера 11 (например типа 1921ВК035). От микроконтроллера 11 сигнал CLOCK поступает на цифровой передатчик 9 с интерфейсом RS422 (например, типа 5559ИН18Т), затем двуполярный сигнал CLOCK+и CLOCK- подается на цифровой преобразователь угла 4. На линии SYNC цифровой преобразователь угла 4 формирует импульсы с частотой 20 кГц, передний фронт которых соответствует моментам «защелкивания» текущего положения цифрового преобразователя угла 4. Микроконтроллер 11 по фронту сигналов начинает формировать импульсы CLOCK, по фронту которых цифровой преобразователь угла 4 выдает 32 бита данных DATA (фигура 2).
Микроконтроллер 11 преобразует 32-х разрядный последовательный код в 17-ти разрядный параллельный код угла поворота.
От объекта применения 1 напряжение возбуждения Uвозб, предназначенное для ранее применяемого ВТ, поступает на трансформатор 16 с частотой f=400 Гц. Трансформатор 16 выдает переменные выходные напряжения, необходимые для работы блока питания 17 и компаратора 10. Резисторы R1-R4 служат для согласования напряжения срабатывания компаратора 10. Компаратор 10 сравнивает Uвозб с нулевым уровнем, т.е. определяет момент перехода сигнала через 0 В. Блок питания 17 формирует необходимые напряжения питания микросхем и опорное напряжение Vref для двух 16-ти разрядных четырехквадрантных цифроаналоговых преобразователей 12 и 13. Оба четырехквадрантных цифроаналоговых преобразователя 12 и 13 могут быть реализованы на микросхеме типа 1273НА03А4 (изготовитель НИИЭТ).
Микроконтроллер 11 по принятому углу поворота от цифрового преобразователя угла 4 вычисляет значение Sin и Cos с привязкой к фронту напряжения возбуждения Uвозб и выдает с частотой дискредитации последовательный код SPI в оба канала четырехквадрантных цифроаналоговых преобразователей 12 и 13. Далее аналоговые напряжения четырехквадрантных цифроаналоговых преобразователей 12 и 13 подаются на фильтры низких частот 14 и 15, фильтрующие частоту дискретизации.
Частота дискретизации четырехквадрантных цифроаналоговых преобразователей 12 и 13 выбирается равной частоте выдачи цифрового преобразователя угла 4 (например, 20 кГц для индуктосина типа MF75). За период 400 Гц умещается 50 периодов частоты 20 кГц, поэтому целесообразно усреднять 50 значений угла индуктосина 4. При переходе синуса через ноль выполняется расчет амплитуды сигнала синусной и косинусной составляющей по формулам:
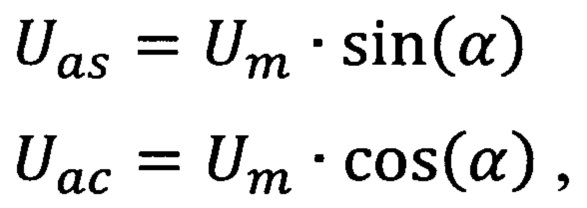
где: Um - максимальная амплитуда 16-ти разрядного числа (Um=65535);
α - угол поворота ротора 5 цифрового преобразователя угла 4.
Угол α (радиан) может быть рассчитан по формуле:
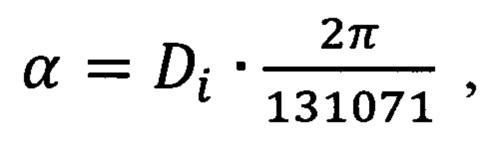
где: Di - усредненное значение кода угла от цифрового преобразователя угла 4;
131071 - соответствует 17-ти разрядам цифрового преобразователя угла 4 для индуктосина MF75.
Выходные значения синусной и косинусной составляющей, аналогичные значениям, вырабатываемым аналоговым ВТ, в течение периода 400 Гц в дискретные времена могут рассчитываться по формулам:
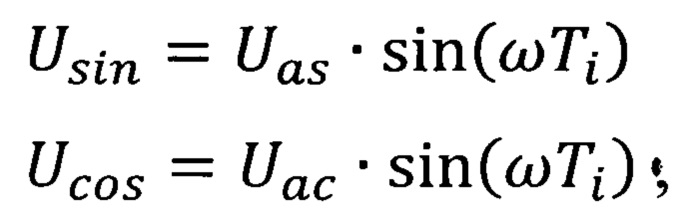
где: ω=2π⋅f (f=400 Гц);
Т-период частоты 20 кГц (1/20000=5⋅10-5);
i - дискретные значения времени (0…49).
Значения sin(ωTi) могу быть заранее рассчитаны и занесены в таблицу программы микроконтроллера 11, а итоговые вычисления осуществлены по следующим соотношениям:
Выполнение этих соотношений позволяет обеспечить взаимозаменяемость датчика положения ротора 3 с каналами подключения аналоговых ВТ и сохранить повышенную точность цифрового измерения угла положения поворотного устройства 2 и ротора 5, улучшая характеристики объекта применения 1, так как статическая точность цифрового преобразователя 4, например, типа «индуктосин MF75», составляет 1'20'' (см. табл. 1), что на 20'' выше точности, достигаемой ВТ, например, типа «2,5ВТ ЛШО.301.014ТУ» (погрешность 2,5ВТ равна 1'40'' для класса точности 0,05).
Также возможно повышение точности более, чем в ~2 раза, за счет калибровки датчика положения ротора 3, так как обмотки статора и ротора 5 выполнены на немагнитных печатных платах и имею жесткую привязку по геометрии обмоток. В этом случае ошибки геометрии обмоток возможно компенсировать калибровкой, что недостижимо для аналоговых ВТ, содержащих распределенные обмотки и магнитопроводы статора и ротора. Практические измерения, проведенные на образцах датчика положения ротора 3, показали, что после проведения первой же калибровки датчика достигнута точность измерения угла порядка ~40''.
Таким образом, в предлагаемом устройстве обеспечивается возможность модернизации ранее выпущенных объектов в полевых условиях заменой аналогового ВТ без дополнительной доработки внутренней аппаратуры эксплуатируемых объектов в заводских условиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК ПОЛОЖЕНИЯ | 2017 |
|
RU2654371C1 |
| Устройство для преобразования перемещения в код | 1981 |
|
SU978174A1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2014 |
|
RU2550379C1 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ В КОД | 1991 |
|
RU2007027C1 |
| ЦИФРОВОЙ ДАТЧИК УГЛА С ЦИФРОВОЙ КОРРЕКЦИЕЙ ПОГРЕШНОСТИ | 2014 |
|
RU2554561C1 |
| Преобразователь "Угол-Код" индукционного датчика угла | 2016 |
|
RU2649033C1 |
| СИСТЕМА МОНИТОРИНГА АВТОМАТИЧЕСКИХ РЕГУЛЯТОРОВ ВОЗБУЖДЕНИЯ И СИСТЕМ ВОЗБУЖДЕНИЯ ГЕНЕРАТОРОВ ЭЛЕКТРОСТАНЦИИ | 2013 |
|
RU2509333C1 |
| Устройство для функционального преобразования | 1978 |
|
SU734712A1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2013 |
|
RU2541856C2 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В ЭЛЕКТРИЧЕСКИЙ ИНФОРМАЦИОННЫЙ СИГНАЛ | 2007 |
|
RU2327222C1 |
Изобретение относится к электротехнике, а именно к измерительной технике, и может быть использовано для высокоточных измерений угловых перемещений различных поворотных устройств. Технический результат заключается в обеспечении взаимозаменяемости датчика положения ротора с каналами подключения аналоговых вращающихся трансформаторов и сохранении повышенной точности цифрового измерения угла положения ротора, улучшая характеристики объекта применения. Для этого датчик положения ротора содержит обмотки статора и ротора, выполненные на печатных платах, микроконтроллер, компаратор, цифровой приемник, цифровой передатчик, два двухканальных четырехквадрантных цифроаналоговых преобразователя, два фильтра низких частот, трансформатор, блок питания, а также дополнительно содержит компаратор и микроконтроллер. А также выполняются соотношения для выходных сигналов датчика положения ротора, подаваемых на аналоговый вход объекта применения по линии приема от аналогового вращающегося трансформатора. 2 ил., 1 табл.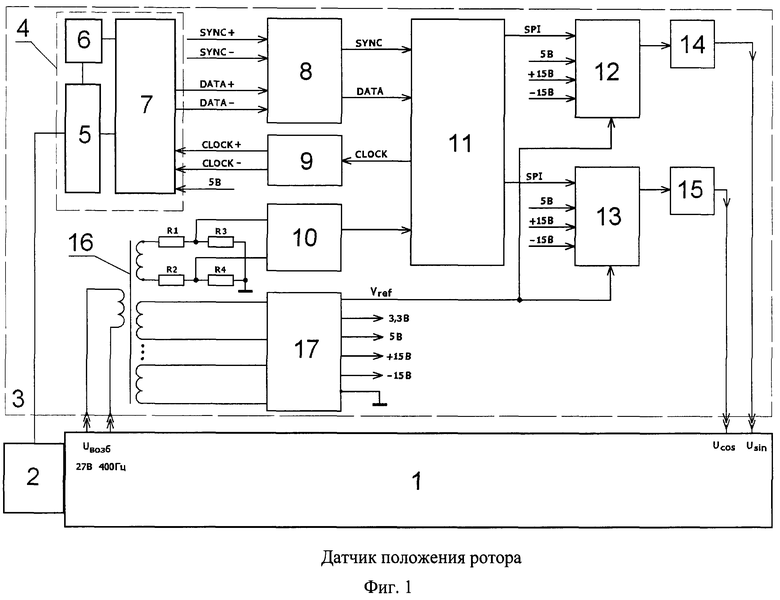
Датчик положения ротора, содержащий обмотки статора и ротора, выполненные на печатных платах, микроконтроллер и компаратор, отличающийся тем, что он содержит цифровой приемник, цифровой передатчик, два двухканальных четырехквадрантных цифроаналоговых преобразователя, два фильтра низких частот, трансформатор, блок питания, а также дополнительно содержит компаратор и микроконтроллер, при этом выполняются следующие соотношения:
где Usin, Ucos - выходные сигналы датчика положения ротора, подаваемые на аналоговый вход объекта применения по линии приема от аналогового вращающегося трансформатора;
Um - максимальная амплитуда разрядного числа четырехквадрантных цифроаналоговых преобразователей;
α - угол поворота ротора;
ω=2π⋅f (f - частота напряжения возбуждения, подаваемого от объекта применения по линии питания аналогового вращающегося трансформатора);
Т - период частоты дискретизации четырехквадрантных цифроаналоговых преобразователей;
i - дискретные значения времени.
| Датчик положения ротора (варианты) | 2017 |
|
RU2689787C2 |
| ИНДУКЦИОННЫЙ ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ | 2014 |
|
RU2570232C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДИНАМИЧЕСКОГО МОМЕНТА УПРАВЛЯЮЩЕГО ДВИГАТЕЛЯ-МАХОВИКА | 2020 |
|
RU2736411C1 |
| CN 107134955 A, 05.09.2017 | |||
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2004 |
|
RU2291552C2 |
| DE 19527983 A1, 06.02.1997. | |||

