ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к электротехнике, а именно к вращающимся электрическим машинам со встроенным датчиком углового положения, и может быть использовано в составе электроприводов, работающих в двигательном и генераторном режимах, например, в робототехнических и мехатронных системах, мобильных платформах, а также в промышленной автоматике.
ОПИСАНИЕ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ
Тенденции унификации, облегчения, миниатюризации и удешевления компонентной базы робототехнических и мехатронных систем обуславливают стремление разработчиков и производителей электрических машин искать способы интеграции в электрические машины датчиков углового положения вала ротора. Такие датчики необходимы для управления синхронными электродвигателями с постоянными магнитами, а именно, для определения угла поворота вектора магнитного потока ротора. Показания датчиков углового положения также могут использоваться в качестве сигналов обратной связи в контурах управления выходной координатой электропривода. Таким образом, требования, предъявляемые к названным датчикам положения, определяются как способом управления синхронной электрической машиной, так и требованиями к показателям качества всего электропривода.
На практике широкое распространение получили электрические машины со встроенными дискретными или аналоговыми датчиками Холла. В патентной заявке US2015/0200576A1 описана бесколлекторная электрическая машина, содержащая в своем составе печатную плату с двумя электрическими схемами и установленными на ней датчиками положения ротора. Первая электрическая схема образует соединения для подключения датчиков положения ротора, например, на основе эффекта Холла, вторая электрическая схема соединяет в заданной последовательности катушки статора. Датчики Холла установлены на печатной плате таким образом, что они обращены внутрь статора и попадают в пазы между его зубцами. Выводы датчиков Холла паяются в отверстия. Подключение проводов, питающих фазы двигателя также осуществляется пайкой в отверстия на печатной плате.
К достоинствам данного изобретения следует отнести малые осевые габариты электрической машины, обусловленные применением печатной платы, которая используется одновременно для удержания и соединения датчиков Холла, а также для соединения между собой катушек обмотки статора.
К недостаткам рассматриваемого изобретения можно отнести то, что датчики Холла определяют абсолютный угол только в пределах одного электрического оборота вала электрической машины. Ввиду того, что электрический и механический углы поворота вала электрической машины связаны через число пар полюсов ротора, датчики Холла не позволяют определять абсолютное положения вала ротора. Другим недостатком дискретных датчиков Холла является их низкая точность, составляющая для трех датчиков Холла, сдвинутых друг относительно друга под 120 электрических градусов, всего ±30 электрических градусов. Низкая точность дискретных датчиков Холла ведет к снижению КПД и увеличению пульсации электромагнитного момента электрической машины.
В заявке на патент US20120176006A1 описана электрическая машина, имеющая в своем составе датчик углового положения в виде синусно-косинусного вращающегося трансформатора (СКВТ; в англоязычной литературе принято название resolver). Датчик углового положения расположен на оси электрической машины.
К недостаткам данного изобретения можно отнести то, что используемый в нем датчик углового положения по сути является самостоятельным устройством, встроенным в единый корпус с электрической машиной. Такая конструкция имеет низкую степень интеграции и, как следствие, увеличенные осевые габариты.
В связи с развитием микроэлектроники, технологии печатных плат, компьютерных методов расчета и моделирования сложных электромагнитных систем, получили дальнейшее развитие индукционные датчики положения, относящиеся к типу индуктосинов. Будем условно разделять индуктосины на два класса устройств в соответствии с принципом функционирования: вихретокового и индукционного типов. В индуктосинах вихретокового типа взаимная индуктивность обмотки возбуждения статора с приемными обмотками статора зависит от положения ротора, в котором возникают вихревые токи. В индуктосинах индукционного типа обмоткой возбуждения статора в обмотке ротора индуцируется ток, создающий магнитный поток, воздействующий на приемные обмотки статора.
Индуктосины являются прецизионными датчиками углового положения, точность которых может достигать 22 разрядов на оборот для устройств индукционного типа и обычно до 14 разрядов на оборот для устройств вихретокового типа.
Конструкция и принцип работы индуктосинов индукционного типа описаны, например, в заявке US20110025349A1, где они называются индуктивными датчиками положения, что не меняет сути. Равно как и СКВТ, индуктосины относятся к информационным электрическим машинам, выходные сигналы которых представляют собой несущую частоту, промодулированную синусом и косинусом угла поворота ротора. Основные отличия индуктосинов от СКВТ носят конструктивный характер: у индуктосинов как правило нет магнитопровода, магнитный поток индуктосинов аксиальный, обмотки индуктосинов обычно выполняются планарными в виде рисунка на печатных платах, рабочая частота индуктосинов существенно выше, чем у СКВТ. В результате, индуктосины часто оказываются легче и компактнее, чем сопоставимые по точности СКВТ.
В патентной заявке US20210234447A1, которая является наиболее близкой к рассматриваемому изобретению и поэтому принята за прототип, описана электрическая машина со встроенным индукционным датчиком углового положения, статор которого выполнен в виде печатной платы с нанесенными синусной и косинусной обмотками. Ротор представляет собой пластину предопределенной конфигурации, в которой протекают вихревые токи. Таким образом, описание датчика соответствует индуктосину вихретокового типа.
Недостатком данного изобретения является низкая степень интеграции электродвигателя и датчика углового положения, которые представляют собой два самостоятельных устройства в одном корпусе, что влечет за собой увеличенные осевые габариты устройства и низкую точность определения углового положения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Технический результат данного изобретения заключается в увеличении точности определения углового положения, сокращении осевого габарита и массы электродвигателя со встроенным датчиком углового положения за счет использования в качестве встроенного датчика индукционного датчика углового положения, относящегося к типу индуктосинов.
Достижение заявленного технического результата осуществляется за счет интеграции в конструкцию электрической машины индукционного датчика углового положения, относящегося к индуктосинам вихретокового или индукционного типов, предпочтительно, индукционного типа. При этом, бескорпусная синхронная вращающаяся электрическая машина и датчик положения представляют собой единое устройство, а не совокупность устройств в одном корпусе или иное объединение двух независимых устройств.
Предлагаемая бескорпусная синхронная вращающаяся электрическая машина состоит из печатной платы статора с количеством проводящих слоев от 1 до 32, содержащей минимум две электрические схемы, первая для формирования рисунка обмоток статора индуктосина, вторая для соединения катушек или катушечных групп статора в соответствии с принципиальной электрической схемой статора. Третья и последующие электрические схемы, входящие в состав названной печатной платы, могут быть использованы для включения датчиков температуры, датчиков затекания воды и др., которые могут устанавливаться в статор. Печатная плата статора фиксируется на залитых теплопроводным компаундом катушках статора при помощи клея или компаунда, а также пайкой к выводным проводникам катушек или катушечных групп. На печатную плату статора устанавливается печатная плата контроллера индуктосина, которая электрически соединена с обмотками статора индуктосина и осуществляет функции возбуждения и преобразования его сигналов. Ротор электрической машины механически связан с ротором индуктосина, расположенным на небольшом осевом расстоянии от печатной платы статора. Ротор индуктосина состоит из печатной платы ротора индуктосина и корпуса. Печатная плата ротора индуктосина несет электрическую схему обмотки ротора.
Статор индуктосина, являющийся, как отмечено выше, неотъемлемой частью электрической машины, может иметь только обмотки точного отсчета, только обмотки грубого отсчета или те и другие обмотки одновременно. В последнем случае говорят о двухотсчетном индуктосине, который по сравнению с одноотсчетным имеет ряд преимуществ, таких как повышенную точность и абсолютную шкалу в пределах поворота ротора на 360 механических градусов. Вариант исполнения электрической схемы статора двухотсчетного индуктосина может иметь обмотку возбуждения, синусную и косинусную обмотки грубого отсчета, а также синусную и косинусную обмотки точного отсчета. Вихретоковые индуктосины как правило являются одноотсчетными и имеют меньшую точность по сравнению с индукционными.
Печатная плата ротора индуктосина, и печатная плата контроллера индуктосина могут быть заключены в корпуса для защиты от внешних воздействующих факторов.
Соединение цепей бескорпусной вращающейся электрической машины, включая фазные цепи, цепи датчиков температуры и индукционного датчиков положения, с внешней по отношению к ней системой управления или контроллером, предпочтительно, осуществляется посредством пайки соединительных проводов на штырьковые лепестки, установленные на печатной плате статора. Количество штырьковых лепестков, предпочтительно, соответствует количеству электрических цепей, необходимых для подключения бескорпусной вращающейся электрической машины к контроллеру или системе управления.
Указанные штырьковые лепестки устанавливаются на печатную плату статора методом запрессовки или пайки. Альтернативный вариант установки состоит в запрессовке штырьковых лепестков на печатную плату с последующей пайкой. Для увеличения надежности соединения возможна накрутка соединительных проводов на штырьковые лепестки с последующей пайкой.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Признаки и преимущества, а также техническое и промышленное назначение типовых вариантов осуществления настоящего изобретения описаны ниже со ссылками на прилагаемые чертежи.
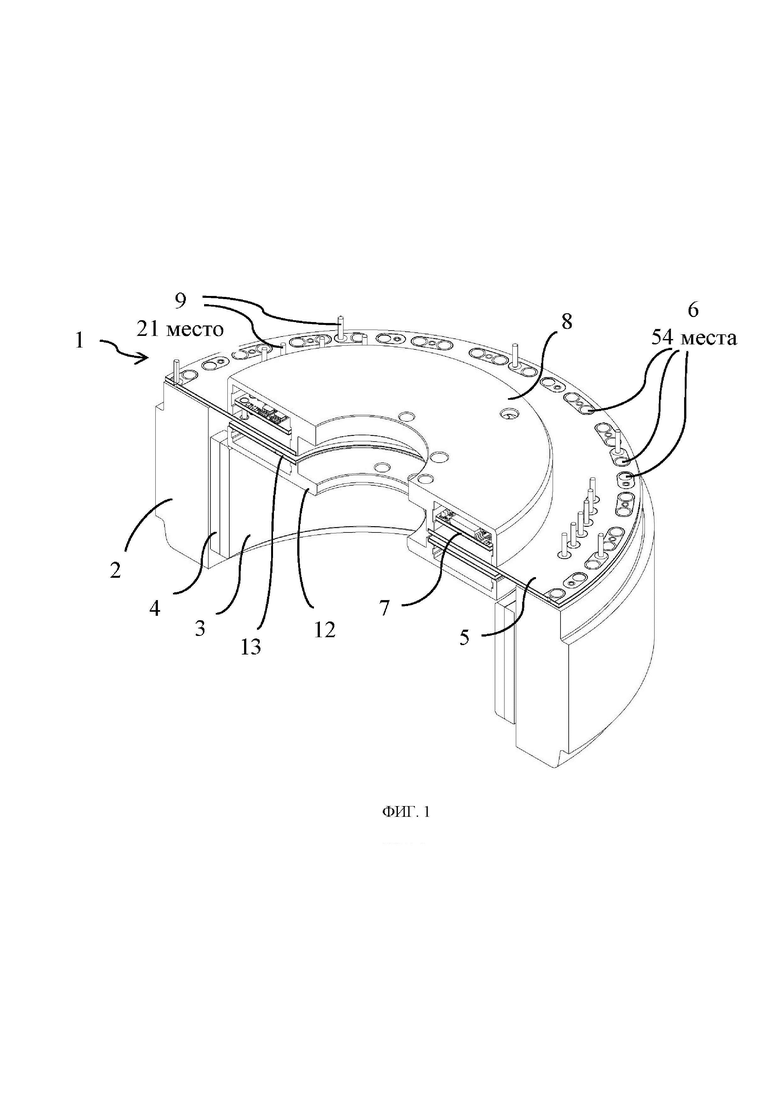
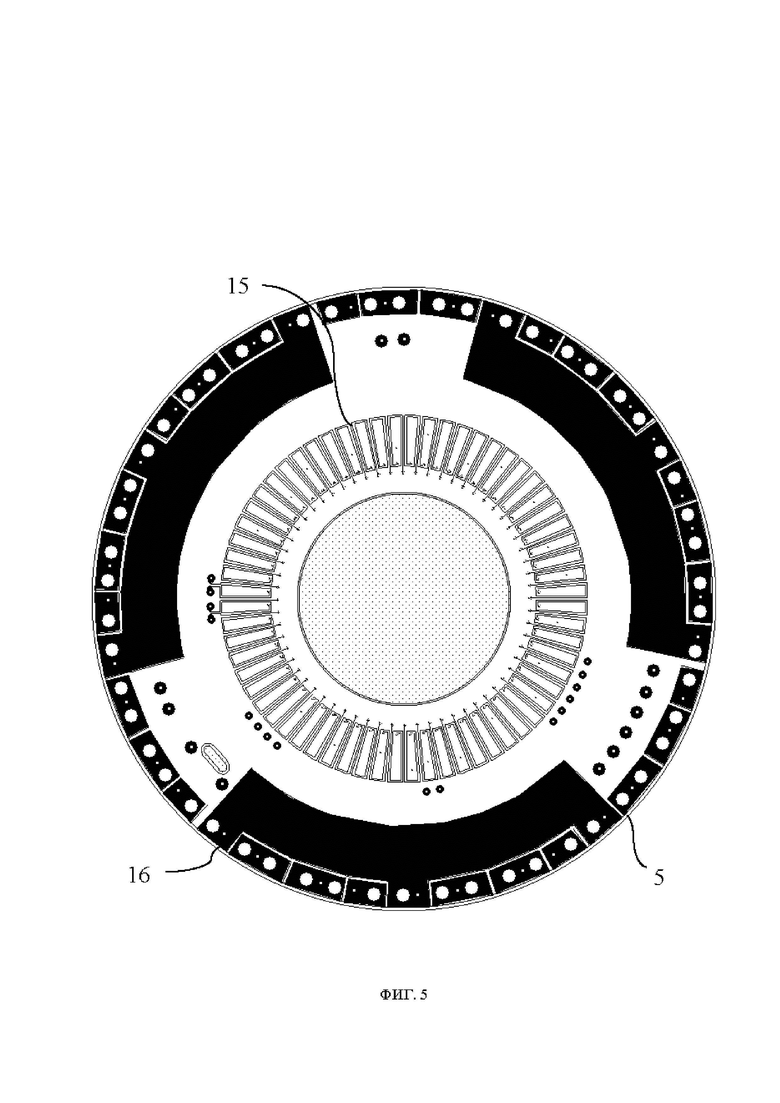
Фиг. 1 представляет собой вид, на котором показан разрез бескорпусной синхронной вращающейся электрической машины с индукционным датчиком положения.
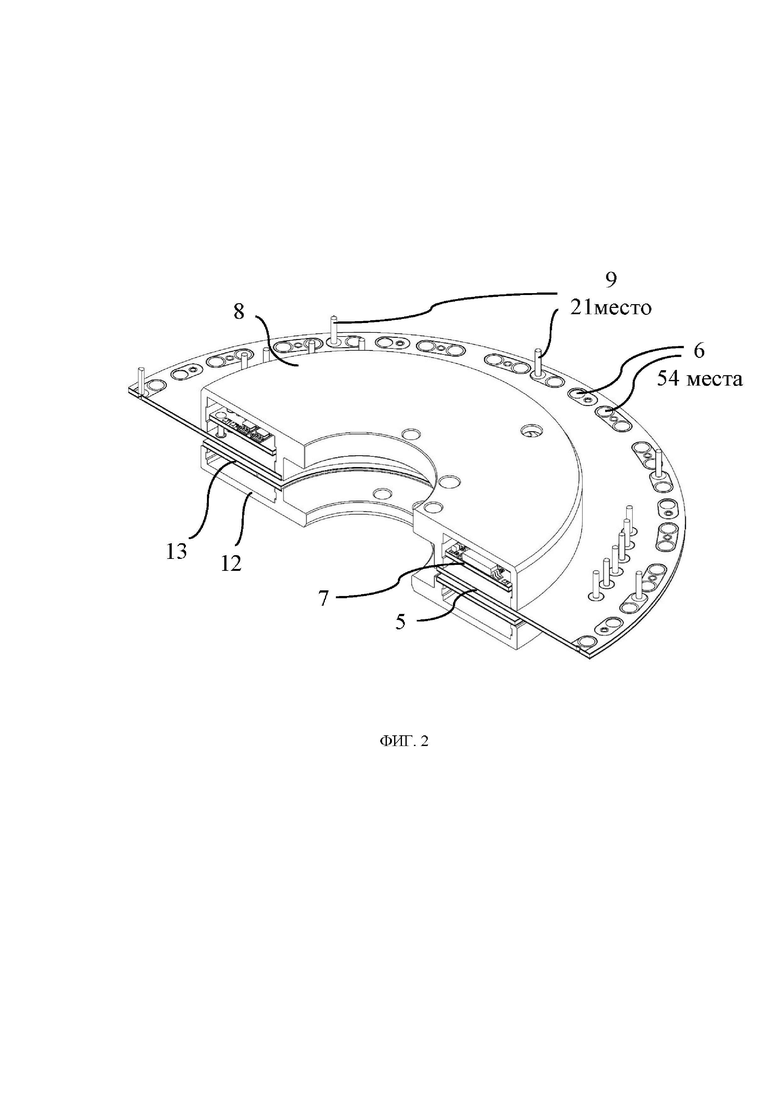
Фиг. 2 представляет собой вид, на котором укрупненно показан разрез узла, состоящего из ротора индуктосина, печатной платы статора, контроллера индуктосина и сопутствующих корпусных деталей.
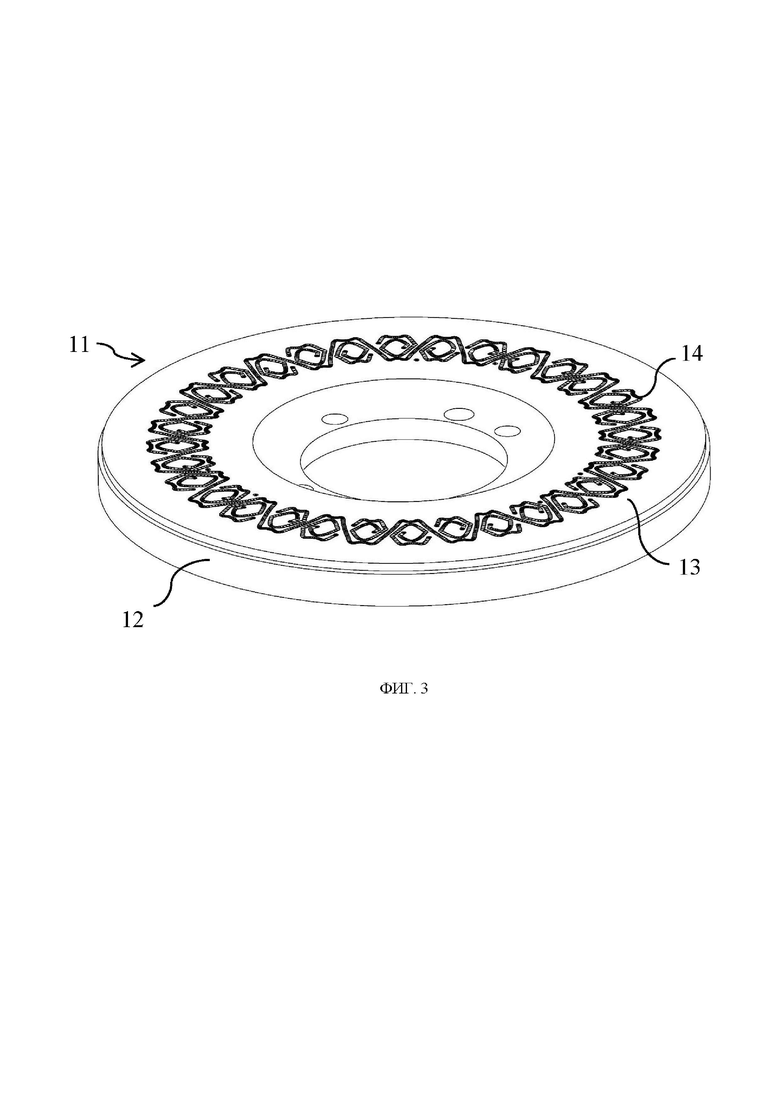
Фиг. 3 представляет собой вид, на котором показан ротор индуктосина.
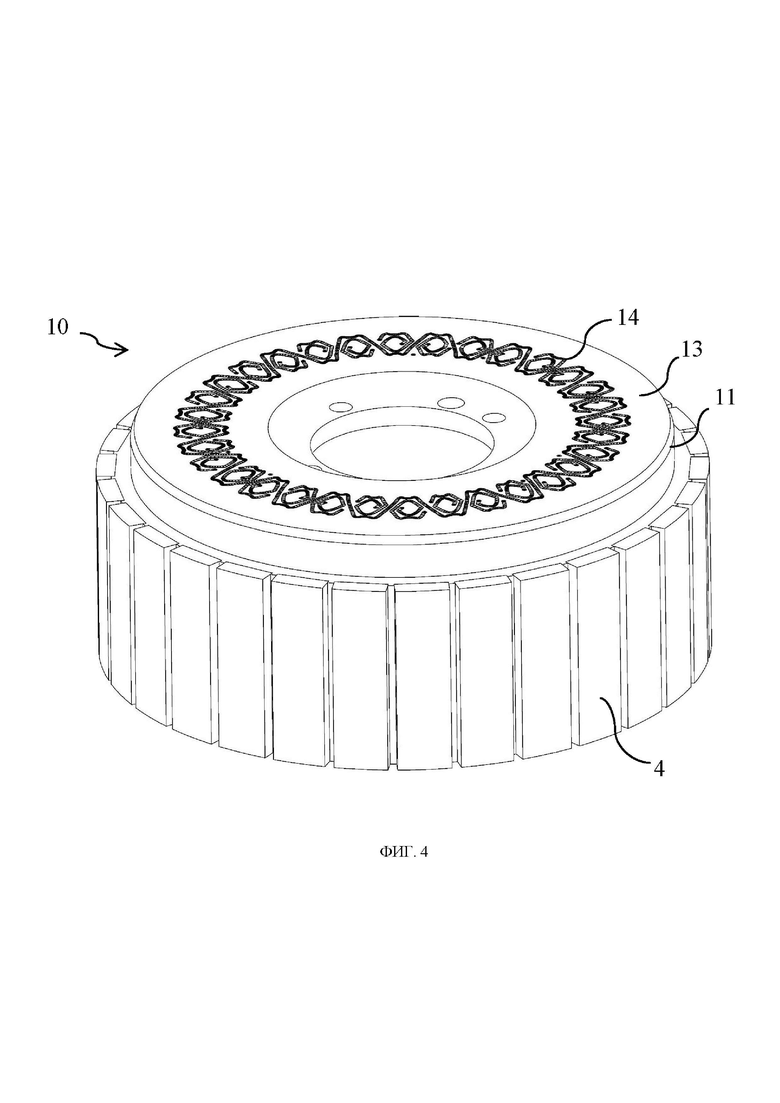
Фиг. 4 представляет собой вид, на котором показан ротор электрической машины с установленным на нем ротором индуктосина.
На Фиг. 5 показан внешний вид печатной платы статора бескорпусной синхронной вращающейся электрической машины с индукционным датчиком положения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Типовые варианты осуществления настоящего изобретения описаны подробно со ссылкой на прилагаемые чертежи. В приведенном ниже описании приведена конструкция синхронной вращающейся электрической машины с индукционным датчиком углового положения для промышленной автоматики, робототехнических и мехатронных систем, однако, это всего лишь пример для описания. Одинаковые элементы обозначены одинаковыми ссылочными позициями, а избыточные элементы опущены.
Форма, количество зубцов статора, количество магнитов ротора, количество штырьковых лепестков, количество датчиков температуры, количество слоев печатной платы статора, конфигурация обмоток статора и ротора индуктосина являются лишь примером для описания и могут быть соответствующим образом модифицированы, чтобы соответствовать характеристикам бескорпусной синхронной вращающейся электрической машины с индукционным датчиком углового положения.
Фиг. 1 представляет собой изображение разреза бескорпусной синхронной вращающейся электрической машины с индукционным датчиком положения 1, состоящей из статора 2, ротора в форме цилиндра 3 с магнитами 4, который расположен на заранее заданном расстоянии в радиальном направлении от статора. На статоре 2 расположена печатная плата статора 5, несущая электрическую схему обмоток статора индуктосина и электрическую схему соединения катушечных групп статора. Пайка катушечных групп статора в печатную плату статора осуществляется посредством металлизированных отверстий 6, расположенных на внешнем радиусе печатной платы статора.
Кроме того, на печатной плате статора 5 методом пайки закреплена печатная плата контроллера индукционного датчика 7, а также корпус 8 и совокупность штырьковых лепестков 9, служащих для соединения рассматриваемой электрической машины с внешней системой управления.
На роторе 10 электрической машины размещен ротор 11 индукционного датчика положения, состоящий из корпуса 12 и печатной платы 13.
На Фиг. 2 для большей наглядности показан увеличенный вид части разреза бескорпусной синхронной вращающейся электрической машины с индукционным датчиком положения.
На Фиг. 3 отдельно показан вариант исполнения ротора 11 индукционного датчика положения, состоящего из корпуса 12 и печатной платы ротора 13. Печатная плата ротора несет электрическую схему обмоток ротора 14, конфигурация которых может различаться в зависимости от точности, числа пар полюсов, наличия двух или одного отсчетов и других характеристик датчика.
На Фиг. 4 отдельно показан вид ротора 10 электрической машины.
На Фиг. 5 показан вид печатной платы статора 5, на котором изображен вариант исполнения электрических схем печатной платы статора, в т.ч. электрическая схема обмоток статора индукционного датчика 15, и электрическая схема соединения катушечных групп статора 16.
| название | год | авторы | номер документа |
|---|---|---|---|
| Бескорпусная синхронная вращающаяся электрическая машина | 2018 |
|
RU2710902C1 |
| Интегрируемая электрическая машина со съемной системой контроля параметров | 2024 |
|
RU2840962C1 |
| ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА СО ВСТРОЕННЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2018 |
|
RU2689380C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА СО ВСТРОЕННЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2017 |
|
RU2656866C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С ВСТРОЕННЫМИ ДАТЧИКАМИ СКОРОСТИ И УГЛОВОГО ПОЛОЖЕНИЯ РОТОРА | 2001 |
|
RU2188494C1 |
| ТЯГОВЫЙ МЕХАТРОННЫЙ МОДУЛЬ | 2007 |
|
RU2330371C1 |
| Вентильный электродвигатель с встроенными датчиками углового положения ротора | 2018 |
|
RU2681302C1 |
| ТЯГОВЫЙ МЕХАТРОННЫЙ МОДУЛЬ | 2003 |
|
RU2250548C1 |
| Датчик положения ротора | 2023 |
|
RU2816167C1 |
| ВЕНТИЛЬНО-ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С ПЕРЕКЛЮЧАЕМЫМИ ФАЗНЫМИ ОБМОТКАМИ | 2018 |
|
RU2698464C1 |
Изобретение относится к электротехнике, а именно к вращающимся электрическим машинам со встроенным датчиком углового положения, и может быть использовано в составе электроприводов, работающих в двигательном и генераторном режимах, например, в робототехнических и мехатронных системах, мобильных платформах, а также в промышленной автоматике. Технический результат заключается в увеличении точности определения углового положения, сокращении осевого габарита и массы электродвигателя со встроенным датчиком углового положения. Достижение заявленного технического результата осуществляется за счет интеграции в конструкцию электрической машины точного индукционного датчика углового положения, относящегося к индуктосинам вихретокового или индукционного типов, предпочтительно индукционного типа. Бескорпусная синхронная вращающаяся электрическая машина со встроенным индукционным датчиком углового положения содержит статор и ротор. Ротор, несущий магниты и закрепленный с возможностью вращения относительно статора, выполнен в виде магнитопровода из материала с высокой магнитной проницаемостью. Статор имеет в своем составе обмотку, магнитопровод из материала с высокой магнитной проницаемостью и печатную плату статора с двумя электрическими схемами. Первая электрическая схема соединяет катушки статора. Вторая электрическая схема платы статора представляет собой обмотки индукционного датчика углового положения, а на роторе электрической машины расположен ротор индукционного датчика углового положения. 8 з.п. ф-лы, 5 ил.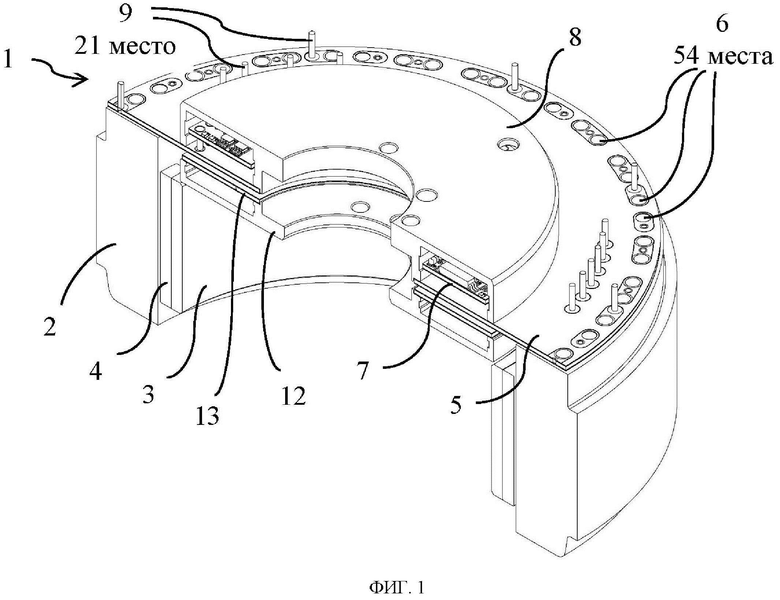
1. Бескорпусная синхронная вращающаяся электрическая машина со встроенным индукционным датчиком углового положения, содержащая статор и ротор, в которой ротор, несущий магниты и закрепленный с возможностью вращения относительно статора, выполнен в виде магнитопровода из материала с высокой магнитной проницаемостью, статор имеет в своем составе обмотку, магнитопровод из материала с высокой магнитной проницаемостью и печатную плату статора с двумя электрическими схемами, причем первая электрическая схема соединяет катушки статора, отличающаяся тем, что вторая электрическая схема платы статора представляет собой обмотки индукционного датчика углового положения, а на роторе электрической машины расположен ротор индукционного датчика углового положения.
2. Бескорпусная синхронная вращающаяся электрическая машина по п.1, отличающаяся тем, что печатная плата статора несет закрепленную на ней печатную плату контроллера индукционного датчика углового положения.
3. Бескорпусная синхронная вращающаяся электрическая машина по п.1, отличающаяся тем, что на печатную плату статора установлен по крайне мере один штырьковый лепесток.
4. Бескорпусная синхронная вращающаяся электрическая машина по п.1, отличающаяся тем, что штырьковые лепестки запрессовываются в отверстия в печатной плате.
5. Бескорпусная синхронная вращающаяся электрическая машина по п.1, отличающаяся тем, что штырьковые лепестки паяются на печатной плате.
6. Бескорпусная синхронная вращающаяся электрическая машина по п.1, отличающаяся тем, что количество слоев печатной платы может быть от 1 до 32.
7. Бескорпусная синхронная вращающаяся электрическая машина по п.1, отличающаяся тем, что обмотка статора выполнена двухрядной концентрированной, при этом катушки статора намотаны через изоляцию, каждая на свой зубец статора.
8. Бескорпусная синхронная вращающаяся электрическая машина по п.1, отличающаяся тем, что катушки статора объединены в последовательно соединенные группы катушек.
9. Бескорпусная синхронная вращающаяся электрическая машина по п.1, отличающаяся тем, что выводы катушек статора или выводы групп катушек статора фиксируются на печатной плате статора методом пайки и соединяются между собой печатным монтажом в соответствии с первой электрической схемой статора.
| US 2021234447 A1, 29.07.2021 | |||
| Бескорпусная синхронная вращающаяся электрическая машина | 2018 |
|
RU2710902C1 |
| US 2011025349 A1, 03.02.2011 | |||
| US 2015200576 A1, 16.07.2015 | |||
| US 2012176006 A1, 12.07.2012. | |||

