Настоящее изобретение относится к области измерительной техники, а именно к преобразователям линейного ускорения с частотным выходным сигналом.
Известен акселерометр, содержащий подвижный элемент консольной конструкции, преобразователь инерционной силы в напряжение деформации, преобразователь напряжения деформации в электрический сигнал, автогенератор частоты, опорный генератор частоты, смеситель [1].
Недостатком этого акселерометра является наличие погрешности от перекрестной связи, когда при измерении ускорения по измерительной оси вследствие углового перемещения подвижного элемента появляется составляющая сигнала акселерометра, вызванная ускорением по оси, направленной вдоль консоли подвижного элемента.
Наиболее близким по технической сущности является акселерометр [2], содержащий корпус, два подвижных элемента консольной конструкции с противоположным расположением свободных концов консолей относительно друг друга, два преобразователя инерционной силы в механическую величину, каждый из которых связан с одним из подвижных элементов, два автогенератора частоты, смеситель частот.
Такой акселерометр обладает большим объемом конструкции вследствие необходимости выполнения подвижных элементов с большой массой для создания достаточных усилий с целью получения значительного напряжения в жестких преобразователях инерционной силы в напряжение деформации.
Техническим результатом изобретения является миниатюризация конструкции акселерометра и снижение трудоемкости его производства.
Указанный технический результат достигается в акселерометре, содержащем корпус, два подвижных элемента консольной конструкции с противоположным расположением свободных концов консолей относительно друг друга, два преобразователя инерционной силы в механическую величину, каждый из которых связан с одним из подвижных элементов, два автогенератора частоты, смеситель частот, тем, что подвижные элементы выполнены в пластине из монокристаллического материала, например кремния, вместе с неподвижной рамкой и упругим подвесом, соединяющим каждый подвижный элемент и неподвижную рамку, введены первая статорная пластина и вторая статорная пластина, поверхности каждой стороны каждого подвижного элемента выполнены электропроводными, выполнен дифференциальный емкостный преобразователь перемещения обоих подвижных элементов с одним неподвижным электродом на первой статорной пластине в области проекции обоих подвижных элементов на эту пластину и со вторым неподвижным электродом на второй статорной пластине в области проекции на нее обоих подвижных элементов, подвижный электрод дифференциального емкостного преобразователя перемещения образован электропроводными поверхностями подвижных элементов, неподвижная рамка расположена между первой и второй статорными пластинами с образованием зазора между каждым подвижным элементом и каждым неподвижным электродом на первой и второй статорных пластинах, в качестве преобразователя инерционной силы в перемещение подвижного элемента выполнен упругий подвес каждого подвижного элемента с жесткостью ξ в направлении, перпендикулярном поверхностям подвижных элементов, определяемой соотношением:
где m - масса подвижного элемента;
aв - верхний предел диапазона измеряемых ускорений;
d - зазор между подвижным и неподвижным электродом;
каждый автогенератор частоты выполнен как RC-генератор или LС-генератор, одна часть дифференциального емкостного преобразователя перемещения с одним неподвижным электродом и подвижным электродом включена в цепь одного RC-генератора или LC-генератора в качестве определяющего частоту генерации элемента, вторая часть дифференциального емкостного преобразователя перемещения с другим неподвижным электродом и тем же подвижным электродом включена в цепь второго RC-генератора или LC-генератора в качестве определяющего частоту генерации элемента.
В одном частном случае выполнения акселерометра каждый подвижный элемент выполнен в пластине из монокристаллического материала с расположением его электропроводной поверхности на глубине d от ближайшей параллельной ей поверхности неподвижной рамки, составляющей зазор между подвижным и неподвижным электродами дифференциального емкостного преобразователя перемещения.
В другом частном случае выполнения акселерометра первая и вторая пластины выполнены из монокристаллического материала, например кремния.
Путем выполнения подвижных элементов в пластине из монокристаллического материала, например кремния, вместе с неподвижной рамкой и упругим подвесом, введения первой и второй статорных пластин, выполнения неподвижных электродов дифференциального емкостного преобразователя на первой и второй статорных пластинах и подвижного электрода как электропроводной поверхности подвижных элементов, выполнения в качестве преобразователя инерционной силы в перемещение подвижного элемента упругого подвеса с жесткостью, определяемой расчетным соотношением, включения частей дифференциального емкостного преобразователя перемещений в цепи RC-генератора или LC-генератора позволяет выполнить основные элементы акселерометра по планарной групповой интегральной технологии, чем обеспечивается миниатюризация конструкции акселерометра и снижение трудоемкости его производства.
На фиг. 1 представлен общий вид акселерометра, на фиг. 2 - пластина с подвижными элементами, на фиг. 3 - одна из статорных пластин, на фиг. 4 - частный случай выполнения пластины с подвижными элементами, на фиг. 5 - электрическая схема акселерометра.
В корпусе 1 акселерометра (фиг. 1) установлена пластина 2 из монокристаллического материала, например кремния, в которой образованы неподвижная рамка 3 и два подвижных элемента 4', 4'' с электропроводными поверхностями 5. Пластина 2 установлена между первой статорной пластиной 6 с неподвижным электродом 7 и второй статорной пластиной 8 с неподвижным электродом 9 на платиках 10, 11 так, что между неподвижным электродом 7 и ближайшей поверхностью 5 подвижных элементов 4', 4'' образован зазор d. Аналогичный зазор образован между неподвижным электродом 9 и ближайшей поверхностью 5 подвижных элементов 4', 4''.
Электропроводные поверхности 5 на подвижных элементах 4', 4'' выполнены путем легирования кремния бором.
Корпус 1 закрыт крышкой 12.
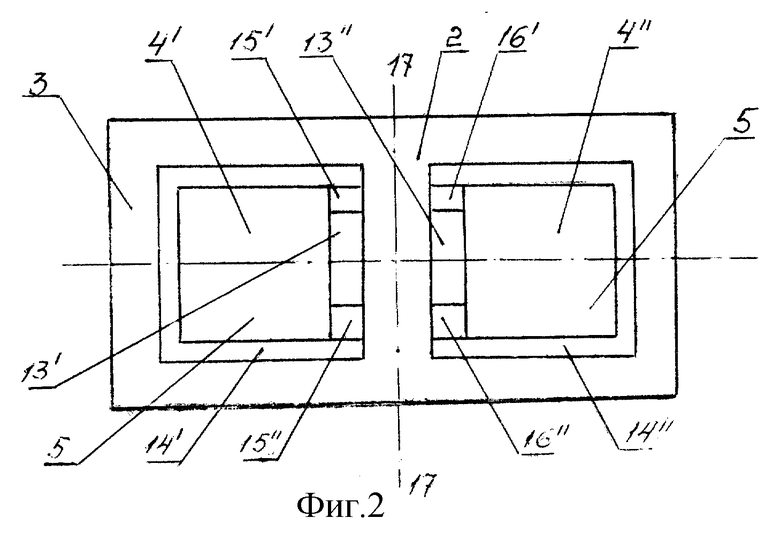
Подвижные элементы 4', 4'' (фиг. 2) выполнены в пластине 2 путем анизотропного травления кремния с образованием окон 13', 13'', промежутков 14', 14'', отделяющих подвижные элементы 4', 4'' от неподвижной рамки 3, и упругих перемычек 15', 15'', 16', 16'', соединяющих подвижные элементы 4', 4'' с неподвижной рамкой 3. Упругие перемычки 15', 15'', 16', 16'' образуют упругий подвес подвижных элементов 4', 4'' и являются преобразователями инерционной силы в перемещение подвижных элементов. Для этого упругие перемычки 15', 15'' выполнены с суммарной жесткостью ξ в направлении, перпендикулярном поверхности 5 подвижного элемента 4', определяемой соотношением:
где m - масса подвижного элемента 4;
aв - верхний предел диапазона измеряемых ускорений;
d - зазор между подвижным элементом 4 и каждым из неподвижных электродов 7, 9.
Аналогично выполнена суммарная жесткость упругих перемычек 16', 16''.
Подвижные элементы 4', 4'' имеют консольную конструкцию, свободные концы их консолей расположены по разные стороны от оси симметрии 17 - 17 пластины 2.
Неподвижный электрод 7 (фиг. 3) на первой статорной пластине 6 образован напылением электропроводного материала, например алюминия, его контур 18 совпадает с проекцией обоих подвижных элементов 4', 4'' на первую статорную пластину 6. Аналогично выполнен неподвижный электрод 9 на второй пластине 8.
В частном случае выполнения акселерометра (фиг. 4) путем травления кремния пластины 2 поверхности 5 подвижных элементов 4', 4'' выполнены с их расположением в пластине 2 на глубине d от ближайших поверхностей 19, 20 неподвижной рамки 3. Расстояние d равно зазору между неподвижным и подвижным электродами.
Дифференциальный емкостный датчик перемещения (фиг. 5) выполнен из неподвижного электрода 7 на первой статорной пластине 6, неподвижного электрода 9 на второй статорной пластине 8 и подвижного электрода, которым является электропроводная поверхность 5 подвижных элементов 4', 4''.
Неподвижный электрод 7 и электропроводная поверхность 5 образуют конденсатор C1, неподвижный электрод 9 и электропроводная поверхность 5 образуют конденсатор C2.
Выполнение автогенераторов дано на примере RC-генератора.
Конденсатор C1 соединен последовательно с резистором R1 и включен в качестве времязадающего конденсатора в цепь первого RC-генератора 21. Конденсатор C2 соединен последовательно с резистором R2 и включен в качестве времязадающего конденсатора в цепь второго RC-генератора 22. Выходы RC-генераторов 21, 22 подключены к смесителю частот 23 с фильтром.
Акселерометр работает следующим образом. При наличии ускорения a по измерительной оси акселерометра, направленной перпендикулярно поверхностям 5 подвижных элементов 4', 4'', на каждый подвижный элемент 4', 4'' действует инерционная сила Fи
Fи = ma. (2)
Под действием инерционной силы происходит перемещение каждого подвижного элемента до тех пор, пока позиционная сила Fп каждой пары упругих перемычек 15', 15'' или 16', 16'' упругого подвеса не уравновесит инерционную силу.
Позиционная сила
Fп = ξδ, (3)
где δ - перемещение подвижного элемента.
При условии равновесия инерционной и позиционной сил
ma = ξδ. (4)
Отсюда
В дифференциальном емкостном преобразователе перемещения перемещение подвижных элементов преобразуется в изменение его емкостей. Пусть измеряемое ускорение таково, что зазор между неподвижным электродом 9 и неподвижным электродом уменьшается.
Тогда емкость C1 конденсатора C1;
где ε - относительная диэлектрическая проницаемость среды между неподвижными электродами 7, 9 и подвижным электродом;
ε0 - абсолютная диэлектрическая проницаемость;
S - площадь поверхности одной электропроводной поверхности обоих элементов 4'; 4''.
Емкость C2 конденсатора C2;
Частота f1 RC-генератора 21:
где r1 - сопротивление резистора R1.
Частота f2 RC-генератора 22:
где r2 - сопротивление резистора R2.
На выходе смесителя частот 23 с фильтром будет разность частот Δf:
Δf = f1-f2 (10)
Пусть
r1 = r2 = r. (11)
Тогда с учетом выражений (11), (8), (9) разность частот:
После подстановки в (12) выражения (5) получается:
Таким образом, разность частот с выхода смесителя частот 23 пропорциональна измеряемому ускорению и разность частот является выходным сигналом акселерометра.
При ускорении, направленном вдоль консолей подвижных элементов 4', 4'', вследствие того, что свободные концы консолей подвижных элементов расположены в противоположные стороны относительно друг друга, перемещение подвижных элементов 4', 4'' происходит в разные стороны, что не вызывает изменения емкостей конденсаторов C1 и C2.
Поэтому не изменяются частоты f1 и f2 RC-генераторов 21, 22 и разность частот Δf на выходе смесителя частот 23 остается неизменной.
Таким образом при наличии ускорения по осям, не совпадающим с измерительной осью акселерометра, выходной сигнал акселерометра остается неизменным.
Чтобы акселерометр мог измерять ускорения на верхнем пределе aв диапазона измеряемых ускорений, нужно выполнить условие:
δ ≤ d (14)
При a = aв из выражений (5) следует:
Источники информации
1. Патент США N 3033043, НКИ 73/517. Цифровой акселерометр, 1962 г.
2. Патент США N 2928668, НКИ 73/517. Акселерометр, 1960 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1998 |
|
RU2149412C1 |
| ИЗМЕРИТЕЛЬ ЛИНЕЙНОГО УСКОРЕНИЯ | 1999 |
|
RU2148829C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1998 |
|
RU2149411C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2000 |
|
RU2184380C1 |
| АКСЕЛЕРОМЕТР | 1999 |
|
RU2148830C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ АКСЕЛЕРОМЕТРА | 2001 |
|
RU2186400C1 |
| МУЛЬТИСЕНСОР | 1996 |
|
RU2104559C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2001 |
|
RU2186401C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1998 |
|
RU2140652C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2003 |
|
RU2246735C1 |



Акселерометр предназначен для использования в области измерительной техники в качестве преобразователя линейного ускорения с частотным выходным сигналом. Акселерометр содержит два подвижных элемента, два преобразователя инерционной силы в механическую величину, два автогенератора частоты, смеситель частот. Подвижные элементы выполнены в пластине из монокристаллического материала. Введены первая и вторая неподвижные пластины. В качестве преобразователя инерционной силы в перемещение используется упругий подвес с жесткостью, определяемой верхним пределом диапазона измеряемых ускорений. Части дифференциального емкостного преобразователя перемещения включены в цепи автогенераторов частоты. Техническим результатом является миниатюризация конструкции акселерометра и снижение трудоемкости его производства. 4 з. п. ф-лы, 5 ил.
| АКСЕЛЕРОМЕТР | 1990 |
|
RU2018852C1 |
| АКСЕЛЕРОМЕТР | 1994 |
|
RU2083989C1 |
| АКСЕЛЕРОМЕТР | 1985 |
|
RU2045761C1 |
| US 5616844 A, 01.04.97 | |||
| Автоматический огнетушитель | 0 |
|
SU92A1 |
| DE 4200293 A1, 13.08.92. | |||

