Настоящее изобретение относится к измерительной техникe, а точнее к преобразователям линейного ускорения с прямым преобразованием.
Существует измеритель линейного ускорения [l] с коррекцией выходного сигнала по сигналам нескольких преобразователей, содержащий два акселерометра и схему коррекции.
В таком измерителе линейного ускорения выходной сигнал представлен в аналоговой форме, что затрудняет его применение в устройствах с цифровыми сигналами.
Наиболее близким по технической сущности является измеритель линейного ускорения [2] с цифровым выходным сигналом, содержащий генератор образцовой частоты, первый двоичный счетчик и акселерометр с частотным выходом, включающий чувствительный элемент с электропроводной поверхностью, емкостный преобразователь и электронный автогенератор.
Недостатком этого измерителя линейного ускорения является ограничение возможностей корректировки выходного сигнала измерителя вследствие низких возможностей средств корректировки.
Техническим результатом изобретения является расширение возможностей корректировки выходного сигнала измерителя линейного ускорения, повышение точности его измерений и надежности.
Данный технический результат достигается в измерителе линейного ускорения, содержащем генератор образцовой частоты, первый двоичный счетчик и акселерометр с частотным выходом, включающий чувствительный элемент с электропроводной поверхностью, емкостный преобразователь и электронный автогенератор, тем, что в него дополнительно введены n-1 (n = 3, 4...) акселерометров, аналогичных упомянутому, n двоичных счетчиков, n+1 регистр, дешифратор, постоянное запоминающее устройство, перепрограммируемое постоянное запоминающее устройство, таймер и устройство управления в виде процессора, включающего оперативное запоминающее устройство. Электронный автогенератор каждого акселерометра выполнен с RC-цепью в качестве времязадающего элемента, конденсатором которого является емкостный преобразователь, а генератор образцовой частоты выполнен в виде электронного автогенератора, аналогичного электронному автогенератору акселерометра, конденсатор RC - цепи которого выполнен с емкостью, равной номинальной емкости емкостного преобразователя акселерометра, при этом выход генератора образцовой частоты подключен к входу первого двоичного счетчика, выходы акселерометров подключены к входам соответствующих введенных двоичных счетчиков, выходы каждого двоичного счетчика соединены с входами соответствующего регистра, процессор, постоянное запоминающее устройство, перепрограммируемое постоянное запоминающее устройство и выходы регистров соединены шиной данных, процессор, постоянное запоминающее устройство, перепрограммируемое постоянное запоминающее устройство и дешифратор соединены шиной адреса, процессор по шине управления соединен с входом управления дешифратора, один из выходов которого соединен с входом выбора кристалла (CS) перепрограммируемого постоянного запоминающего устройства, а другие выходы соединены соответственно с входами включения выходов регистров, выход тактовой частоты процессора соединен с входом таймера, выход которого соединен с входом сброса каждого счетчика, с входом записи каждого регистра и с входом запроса прерывания процессора.
В частном случае исполнения измерителя линейного ускорения чувствительный элемент акселерометра выполнен из монокристаллического материала, например кремния.
Путем введения дополнительно к акселерометру с частотным выходом, включающему емкостный преобразователь и электронный автогенератор, n-1 аналогичных акселерометров, n двоичных счетчиков, n+1 регистров, дешифратора, постоянного запоминающего устройства, перепрограммируемого постоянного запоминающего устройства, таймера, устройства управления в виде процессора с оперативным запоминающим устройством, выполнения электронного автогенератора каждого акселерометра с RC-цепью в качестве времязадающего элемента, конденсатором которого является емкостный преобразователь, выполнения генератора образцовой частоты в виде электронного автогенератора, аналогичного электронному автогенератору акселерометра, конденсатор RC-цепи которого выполнен с емкостью, равной номинальной емкости емкостного преобразователя акселерометра, обеспечивается коррекция выходного сигнала измерителя, линейного ускорения, учитывающая изменения, температуры окружающей среды и напряжения, а также выдача выходного сигнала измерителя линейного ускорения по мажоритарной выборке. Этим обеспечивается повышение точности и надежности измерения линейного ускорения посредством измерителя линейного ускорения.
При этом также обеспечивается коррекция выходного сигнала измерителя линейного ускорения, учитывающая нелинейность выходной характеристики в соответствии с математической моделью измерителя линейного ускорения в функции от измеряемого ускорения. Тем самым достигается расширение функциональных возможностей коррекции выходного сигнала и повышение точности измерения линейного ускорения с помощью измерителя линейного ускорения.
На фиг. 1 представлен общий вид акселерометра; на фиг.2 - схема акселерометра; на фиг. 3 - схема генератора образцовой частоты; на фиг. 4 - схема измерителя линейного ускорения.
Акселерометр (фиг. 1) содержит корпус 1, в котором установлена пластина 2 с образованным в ней чувствительным элементом 3 на упругом подвесе 4. В корпусе 1 также установлена статорная пластина 5 с неподвижным электродом 6. Пластина 2 отделена от корпуса 1 и статорной пластины 5 посредством прокладок 7', 7''. Между ближайшей поверхностью чувствительного элемента 3 и неподвижным электродом 6 образован зазор d.
Корпус 1 закрыт крышкой 8.
Пластина 2 выполнена из электропроводного материала, и ее электропроводной поверхностью вместе с неподвижным электродом 6 образован емкостный преобразователь акселерометра.
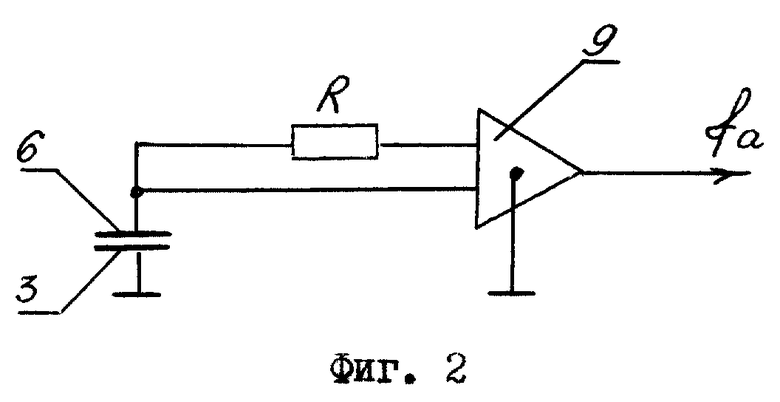
В состав акселерометра (фиг. 2) входит электронный автогенератор с RC-цепью в качестве времязадающего элемента.
Электронный автогенератор содержит электронную часть 9, например в виде релаксационного RC-генератора или RC-таймера, и RC-цепь, резистор R которой одним своим выводом подключен к электронной части 9. Второй вывод резистора R соединен с неподвижным электродом 6 емкостного преобразователя акселерометра. Неподвижный электрод 6 и электропроводная поверхность чувствительного элемента 3 акселерометра образуют конденсатор RC-цепи электронного автогенератора.
Выходной сигнал с частотой fa электронного автогенератора является и выходным сигналом акселерометра.
Генератор образцовой частоты (фиг. 3) построен по такой же схеме, как и электронный автогенератор акселерометра, с таким же резистором R. Только в качестве конденсатора RC-цепи включен конденсатор постоянной емкости С. Емкость конденсатора С выполнена равной номинальной емкости емкостного преобразователя акселерометра в исходном положении чувствительного элемента 3 относительно неподвижного электрода 6. Генератор образцовой частоты выдает сигнал с частотой fo.
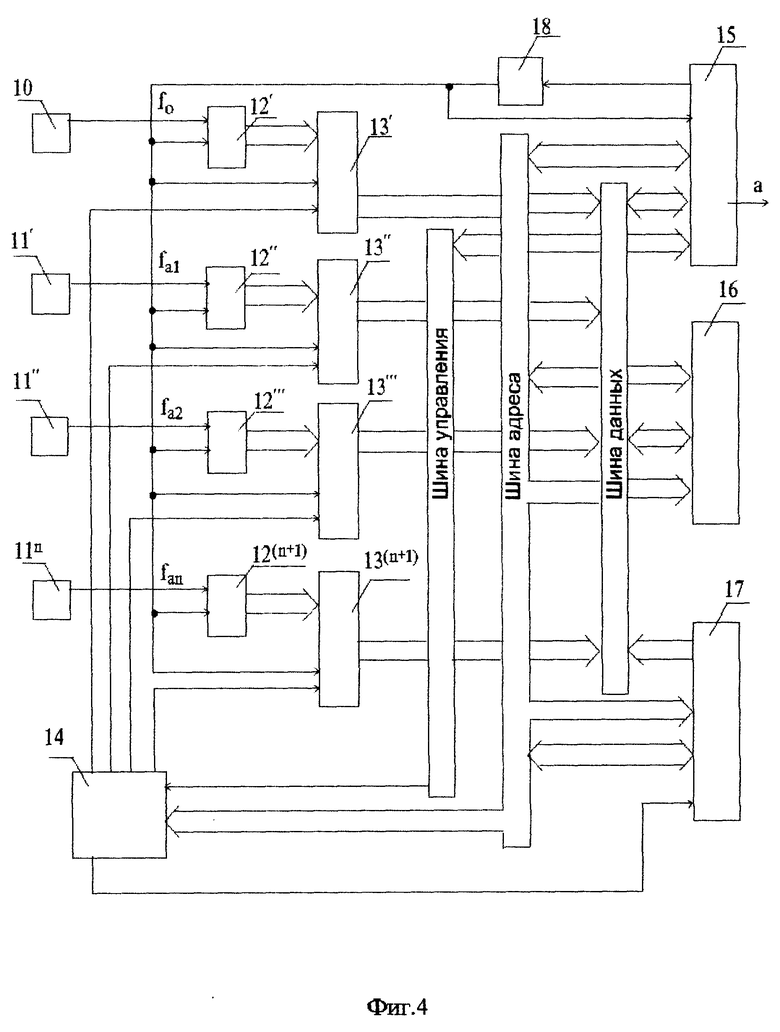
Измеритель линейного ускорения (фиг. 4) содержит генератор образцовой частоты 10 в соответствии со схемой фиг. 3, n (n = 3,4...) акселерометров 11', 11". . . 11(n) в соответствии с конструкцией фиг. 1 и схемой фиг. 2, первый двоичный счетчик 12', n введенных дополнительно двоичных счетчиков 12'', 12'''... 12(n+1), (n+1) регистр 13', 13'',... 13(n+1), дешифратор 14, процессор 15 с оперативным запоминающим устройством (ОЗУ), постоянное запоминающее устройство (ПЗУ) 16, перепрограммируемое постоянное запоминающее устройство (ППЗУ) 17, таймер 18.
Выход генератора образцовой частоты 10 соединен с входом первого двоичного счетчика 12'. Выход каждого из акселерометров 11', 11''... 11(n) соединен с входом одного из введенных дополнительно двоичных счетчиков 12'', 12'''. . . 12(n+1). Выход каждого из двоичных счетчиков 12', 12''...12(n+1) соединен с информационным входом одного из регистров 13', 13''... 13(n+1).
Процессор 15, ПЗУ 16, ППЗУ 17 и выходы регистров 13', 13''.. 13(n+1) соединены шиной данных. Процессор 15, ПЗУ 16, ППЗУ 17 и дешифратор 14 соединены шиной адреса. По шине управления процессор 15 соединен с входом управления дешифратора 14. Вход включения выходов каждого из регистров 13', 13''. . . 13(n+1) соединен с одним из выходов дешифратора 14. Один из других выходов дешифратора 14 соединен с входом выбора кристалла (CS) ППЗУ 17. Выход тактовой частоты процессора 15 соединен с входом таймера 18. Выход таймера 18 соединен с входом сброса каждого из двоичных счетчиков 12', 12''... 12(n+1), с входом записи каждого из регистров 13', 13''... 13(n+1), а также с входом запроса прерывания процессора 15.
Измеритель линейного ускорения работает следующим образом. При наличии измеряемого линейного ускорения, вектор которого направлен перпендикулярно электропроводной поверхности чувствительного элемента 3, под действием инерционной силы в каждом из n акселерометров происходит угловое перемещение чувствительного элемента 3 относительно оси упругого шарнира в упругих перемычках 4. При этом изменяется зазор между неподвижным электродом 6 и чувствительным элементом 3, изменяется емкость емкостного преобразователя акселерометра, изменяется частота электронного автогенератора. Тогда c выходов акселерометров 11', 11''... 11(n) поступают сигналы с частотой fa1, fa2... fan на входы соответствующих счетчиков 12'', 12'''... 12n+1) (фиг. 4). С выхода генератора образцовой частоты 10 на вход первого двоичного счетчика 12' поступает сигнал с частотой fo.
Коды частот f01, fa1, fa2, ...fan с выходов двоичных счетчиков 12', 12''. . . 12(n+1) поступают на входы регистров 13', 13''... 13(n+1) соответственно. По сигналу с выхода дешифратора 14 на вход включения выходов регистров с выходов регистров 13', 13''... 13(n+1) коды частот по шине данных подаются в процессор 15.
В ППЗУ 16 записана первая математическая модель - зависимость выходной частоты каждого из n акселерометров при отсутствии ускорения от частоты генератора образцовой частоты 10. В ППЗУ 16 также записана вторая математическая модель - зависимость ускорения в диапазоне измерения от выходной частоты каждого из акселерометров 11', 11''... 11(n). В процессоре 15 по значению в данный момент частоты foi генератора образцовой частоты 10 по первой математической модели вычисляется нулевая частота faoi каждого из акселерометров 11', 11''... 11(n) при действующих в данный момент внешних условиях (например, температура окружающей среды, напряжение питания и т.д.).
По второй математической модели в процессоре 15 вычисляется изменение частоты fai - faoi и затем измеряемое каждым из акселерометров 11', 11''... 11(n) ускорение. Затем из n вычисленных значений ускорений путем мажоритарного выбора исключаются значения, отличающиеся на установленную величину, например на 25%, оставшиеся значения усредняются, и код усредненного значения ускорения используется как выходной сигнал измерителя, линейного ускорения по линии связи a.
Работа измерителя линейного ускорения осуществляется по программе, записанной в ПЗУ 16.
Передача информации от генератора образцовой частоты 10, акселерометров 11', 11''... 11(n) в процессор 15 производится по сигналам с выхода таймера 18 на вход запроса прерывания процессора 15, входы записи регистров 13', 13''. . . 13(n+1), входы сброса двоичных счетчиков 12', 12''... 12(n+1). При этом по сигналам с таймера 18 информация с двоичных счетчиков 12', 12''... 12(n+1) переписывается в регистры 13', 13''... 13(n+1), а затем двоичные счетчики 12', 12''... 12(n+1) обнуляются.
Процессор 15, получив запрос прерывания, по программе, записанной в ПЗУ 16, считывает информацию с выходов регистров 13', 13''... 13(n+1), подавая сигнал с выхода дешифратора 14 на входы включения выходов регистров 13', 13''. .. 13(n+1), производит обработку поступившей информации в соответствии с первой и второй математическими моделями.
В результате вышеописанного процесса обработки информации акселерометров с использованием мажоритарного выбора повышается надежность измерителя линейного ускорения и повышается точность его измерений.
Источники информации
1. Авторское свидетельство СССР N 1451602, кл. G 01 P 15/09. Пьезоэлектрический преобразователь ускорений. 1989 г.
2. Авторское свидетельство СССР N 1597734 A1, кл. G 01 P 15/08. Способ измерения ускорения. 1990 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ МЕХАНИЧЕСКИХ ВЕЛИЧИН | 2001 |
|
RU2210744C1 |
| ФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ КОДА УГЛА В СИНУСНО-КОСИНУСНЫЕ НАПРЯЖЕНИЯ | 2001 |
|
RU2196383C1 |
| АКСЕЛЕРОМЕТР | 1998 |
|
RU2136004C1 |
| АКСЕЛЕРОМЕТР | 1992 |
|
RU2018132C1 |
| АКСЕЛЕРОМЕТР | 1998 |
|
RU2148831C1 |
| АКСЕЛЕРОМЕТР НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 1992 |
|
RU2018131C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1998 |
|
RU2137141C1 |
| СХЕМА ОБРАБОТКИ СИГНАЛА С ТЕНЗОДАТЧИКА В ПОСЛЕДОВАТЕЛЬНЫЙ КОД | 2001 |
|
RU2223507C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНЫХ ПОЛЕЙ | 1997 |
|
RU2118831C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1998 |
|
RU2140652C1 |

Изобретение предназначено для использования в измерительной технике. Измеритель содержит генератор образцовой частоты, первый двоичный счетчик, n акселерометров с частотным выходом, n двоичных счетчиков, n + 1 регистров, дешифратор, постоянное запоминающее устройство, перепрограммируемое запоминающее устройство, таймер, устройство управления в виде процессора. Электронный автогенератор каждого акселерометра выполнен с RC-цепью в качестве времязадающего элемента. Генератор образцовой частоты выполнен в виде электронного автогенератора. Обеспечивается расширение возможностей корректировки выходного сигнала измерителя, повышение точности и надежности. 1 з.п. ф-лы, 4 ил.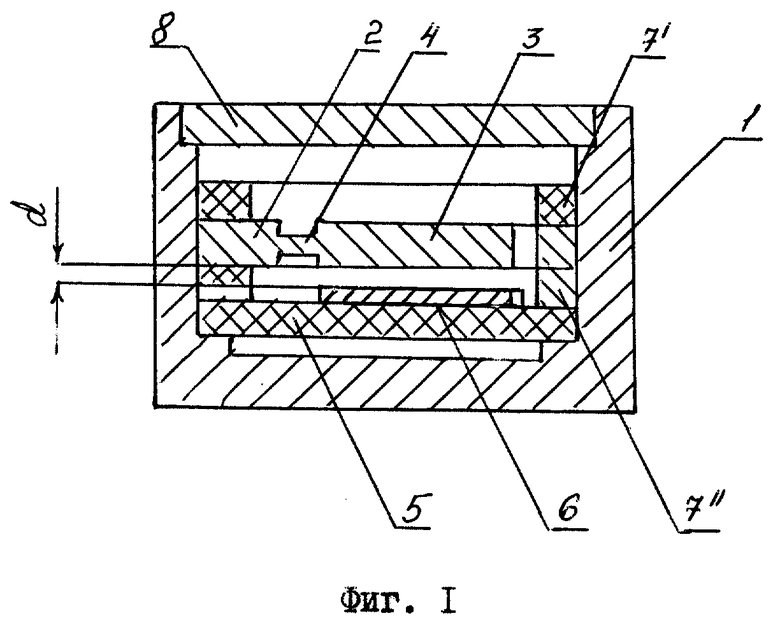
| Способ определения ускорения | 1988 |
|
SU1597734A1 |
| Цифровой измеритель параметров движения | 1986 |
|
SU1476388A1 |
| US 5616844 A, 01.04.1997 | |||
| Автоматический огнетушитель | 0 |
|
SU92A1 |
