Изобретение относится к области измерительной техники, а именно к комбинированным измерительным преобразователям линейного ускорения и угловой скорости.
Известен мультисенсор, содержащий корпус, установленные в нем два акселерометра, систему возбуждения колебаний акселерометра [1].
Такому мультисенмору присуща громоздкость конструкции, вызванная применением акселерометров пространственной конфигурации.
Наиболее близким по технической сущности является мультисенсор [2], содержащий корпус, первую пластину с двумя параллельными основными поверхностями, соединенные упругими перемычками с несущими элементами два чувствительных элемента с электропроводными площадками в первой пластине, систему возбуждения колебаний чувствительных элементов с генератором с выходным сигналом первой частоты и подключенными к его выходу электростатическими силовыми преобразователями, емкостные преобразователи положения чувствительных элементов, генератор питания емкостных преобразователей с выходным сигналом второй частоты, вторую и третьи пластины с частями общего неподвижного электрода электростатических силовых преобразователей системы возбуждения колебаний и неподвижными электродами емкостных преобразователей положения, два усилителя с первым демодулятором сигнала второй частоты в каждом, два вторых демодулятора сигнала первой частоты, каждый из которых подключен к выходу одного из усилителей; содержащий сумматор и устройство вычитания, причем подвижные электроды электростатических силовых преобразователей системы возбуждения колебаний выполнены в первой пластине, выход каждого емкостного преобразователя положения чувствительного элемента подключен к входу одного из усилителей, выходы усилителей с первым демодулятором сигналов второй частоты подключены к входам сумматоров, выходы вторых демодуляторов сигналов первой частоты подключены к входам устройства вычитания, подвижные и неподвижные электроды электростатических силовых преобразователей системы возбуждения колебаний расположены относительно друг от друга с частичным покрытием контуров подвижных электродов контурами неподвижных электродов.
Недостатком такого мультисенсора является погрешность измерения угловой скорости и линейного ускорения от поперечных связей, вызванная угловыми перемещениями чувствительных элементов по двум взаимно перпендикулярным направлениям.
Техническим результатом изобретения является повышение точности измерения угловой скорости и линейного ускорения.
Указанный результат достигается в мультисенсоре, содержащем корпус, первую пластину с двумя параллельными основными поверхностями, соединенные упругими перемычками с несущими элементами два чувствительных элемента с электропроводными площадками в первой пластине, систему возбуждения колебаний чувствительных элементов с генератором с выходным сигналом первой частоты и подключенными к его выходу электростатическими силовыми преобразователями, емкостные преобразователи положения чувствительных элементов, генератор питания емкостных преобразователей с выходным сигналом второй частоты, вторую и третьи пластины с частями общего неподвижного электрода электростатических силовых преобразователей системы возбуждения колебаний и неподвижными электродами емкостных преобразователей положения, два усилителя с первым демодулятором сигнала второй частоты в каждом, два вторых демодулятора сигнала первой частоты, каждый из которых подключен к выходу одного из усилителей; содержащем сумматор и устройство вычитания, причем подвижные электроды электростатических силовых преобразователей системы возбуждения колебаний выполнены в первой пластине, выход каждого емкостного преобразователя положения чувствительного элемента подключен к входу одного из усилителей, выходы усилителей с первым демодулятором сигналов второй частоты подключены к входам сумматора, выходы вторых демодуляторов сигналов первой частоты подключены к входам устройства вычитания, подвижные и неподвижные электроды электростатических силовых преобразователей системы возбуждения колебаний расположены относительно друг друга с частичным покрытием контуров подвижных электродов контурами неподвижных электродов, тем, что в первой пластине выполнена внешняя рамка и расположенные смежно в ее внутренней части две внутренние рамки с двумя парами внешних образующих у каждой рамки, в одной паре внешние образующие одной внутренней рамки расположены симметрично относительно первой оси, параллельной основным поверхностям первой пластины, во второй паре внешние образующие этой внутренней рамки расположены симметрично относительно второй оси, перпендикулярной первой оси, в одной паре внешние образующие другой внутренней рамки расположены симметрично относительно третьей оси, параллельной первой оси, во второй паре внешние образующие этой внутренней рамки расположены симметрично относительно второй оси, внутренние рамки расположены смежно друг с другом со стороны своих одних близлежащих внешних образующих одной пары и с внешней рамкой со стороны своих других внешних образующих той же пары внешних образующих, внешняя рамка и каждая внутренняя рамка со стороны каждой внешней образующей из своей одной пары внешних образующих, не являющихся смежными с внешними образующими другой внутренней рамки, соединены n (n=1, 2...) растяжками, растяжки для каждой внутренней рамки расположены продольно по направлению соответствующей первой и третьей оси, каждая растяжка выполнена с жесткостью к изгибу по направлению второй оси, меньшей жесткости по направлению оси, перпендикулярной основным поверхностям первой пластины, во внутренней области каждой внутренней рамки выполнен чувствительный элемент, соединенный упругими перемычками с внутренней рамкой, подвижные электроды электростатических силовых преобразователей системы возбуждения колебаний в первой пластине выполнены на частях внутренних рамок, смежных друг с другом, каждая часть общего неподвижного электрода электростатических силовых преобразователей системы возбуждения колебаний на второй и третьей пластинах выполнена в области общей проекции на каждую вторую и третью пластины подвижных электродов на внутренних рамках.
В одном частном случае выполнения мультисенсора каждый чувствительный элемент соединен упругими перемычками с внутренней рамкой с одной стороны, осями деформации упругих перемычек одного чувствительного элемента образована его ось подвеса, расположенная по направлению первой или второй оси, осями деформации упругих перемычек другого чувствительного элемента образована его ось подвеса, расположенная по направлению третьей или второй оси, каждый чувствительный элемент выполнен с расположением его центра масс вне его оси подвеса.
Во втором частном случае выполнения мультисенсора чувствительные элементы выполнены с расположением осей подвеса параллельно второй оси симметрично относительно нее или параллельно и симметрично относительно оси, проходящей между смежными внешними образующими внутренних рамок параллельно им.
В третьем частном случае выполнения мультисенсора образованы два дополнительных электростатических силовых преобразователя системы возбуждения колебаний, подвижные электроды которых выполнены на каждой внутренней рамке в ее части, прилегающей к внешней образующей внутренней рамки, смежной с внешней рамкой, неподвижный электрод каждого дополнительного электростатического силового преобразователя выполнен из двух соединенных между собой электрически частей, одна часть неподвижного электрода расположена на второй пластине, вторая часть неподвижного электрода расположена на третьей пластине, причем обе части одного неподвижного электрода расположены в области проекции на вторую и третью пластины части одной внутренней рамки, прилегающей к ее внешней образующей, противоположной внешней образующей из числа смежных внешних образующих обеих внутренних рамок, обе части другого неподвижного электрода расположены в области проекции на вторую и третью пластины части второй внутренней рамки, прилегающей к ее внешней образующей, противоположной внешней образующей из числа смежных внешних образующих обеих внутренних рамок.
В четвертом частном случае выполнения мультисенсора каждая часть каждого неподвижного электрода дополнительных электростатических силовых преобразователей системы возбуждения колебаний выполнена со смещением ее контура по второй оси в сторону периферийной части второй и третьей пластин по сравнению с контуром подвижного электрода на первой пластине, в генераторе системы возбуждения колебаний в дополнение к первому выходу выполнен второй выход с фазой сигнала, отличающейся на 180o от фазы сигнала первого выхода, второй выход соединен с дополнительным электростатическими силовыми преобразователями системы возбуждения колебаний.
В пятом частном случае выполнения мультисенсора в нем для каждого чувствительного элемента выполнен дифференциальный электростатический силовой преобразователь системы силовой компенсации с неподвижными электродами на второй и третьей пластинах в области проекции чувствительного элемента на вторую и третью пластины, дифференциальный электростатический силовой преобразователь системы силовой компенсации каждого чувствительного элемента подключен к выходу того усилителя, вход которого соединен с выходом емкостного преобразователя положения этого чувствительного элемента.
В шестом частном случае выполнения мультисенсора в качестве неподвижных электродов дифференциальных электростатических силовых преобразователей системы силовой компенсации включены неподвижные электроды емкостного преобразователя положения чувствительного элемента.
В седьмом частном случае выполнения мультисенсора первая пластина выполнена из монокристаллического материала, например кремния.
В восьмом частном случае выполнения мультисенсора вторая и третья пластины выполнены из того же монокристаллического материала, что и первая пластина.
Путем выполнения в первой пластине внешней рамки и расположенных смежно в ее внутренней части двух внутренних рамок, соединения каждой из двух противоположных сторон каждой внутренней рамки с внешней рамкой n (n=1, 2 .. . ) растяжками, расположения растяжек продольно по одной из лежащих в основной поверхности первой пластины оси, выполнения жесткости к изгибу каждой растяжки в направлении, перпендикулярном оси расположения растяжки, меньшей, чем жесткость к изгибу в направлении, перпендикулярном основным поверхностям первой пластины, выполнения во внутренней области каждой внутренней рамки чувствительного элемента, соединенного упругими перемычками с внутренней рамкой, выполнения подвижных электродов электростатических силовых преобразователей на смежных частях внутренних рамок, выполнения каждой части неподвижного электрода электростатических силовых преобразователей на второй и третьей пластинах в области общей проекции на них подвижных электродов достигается поступательное перемещение чувствительных элементов в двух взаимно перпендикулярных направлениях, в результате чего устраняются перекрестные связи, устраняются погрешности измерения угловой скорости и линейного ускорения из-за перекрестных связей, повышается точность измерения угловой скорости и линейного ускорения.
При выполнении чувствительных элементов с расположением осей подвеса параллельно второй оси симметрично относительно нее или параллельно и симметрично относительно оси, проходящей между смежными образующими внутренних рамок параллельно им, достигается компенсация погрешностей измерения линейного ускорения вследствие перекрестных связей, возникающих при угловых перемещениях чувствительных элементов при измерении линейного ускорения. В результате повышается точность измерений мультисенсора.
Путем выполнения дополнительных электростатических силовых преобразователей системы возбуждения колебаний обеспечивается увеличение возбуждающей силы в системе возбуждения колебаний, увеличивается амплитуда перемещения внутренних рамок вместе с чувствительными элементами, увеличивается величина поворотного ускорения при наличии угловой скорости. В результате повышается разрешающая способность и точность измерения угловой скорости.
Путем выполнения каждой части каждого неподвижного электрода дополнительных электростатических силовых преобразователей системы возбуждения колебаний со смещением контура части неподвижного электрода по второй оси в сторону периферийной части второй и третьей пластин по сравнению с контуром подвижного электрода на первой пластине, образования в генераторе системы возбуждения колебаний второго выхода с фазой сигнала, отличающейся на 180o от фазы сигнала с первого выхода, подключения к второму выходу генератора дополнительных электростатических силовых преобразователей обеспечивается создание воздействующих на внутренние рамки двух сил, направленных в противоположные стороны и действующих попеременно. Поэтому достигается постоянство амплитуды поступательного перемещения внутренних рамок, что приводит к повышению стабильности величины поворотного ускорения и повышению точности измерения угловой скорости.
Посредством выполнения для каждого чувствительного элемента дифференциального электростатического силового преобразователя системы силовой компенсации с неподвижными электродами на второй и третьей пластинах, подключения электростатического силового преобразователя системы силовой компенсации каждого чувствительного элемента к усилителю, на вход которого подключен емкостной преобразователь положения данного чувствительного элемента, обеспечивается силовая компенсация действующих на чувствительные элементы сил, вызванных линейным и поворотным ускорениями. В результате уменьшаются угловые перемещения чувствительных элементов при измерении угловой скорости и линейного ускорения и уменьшаются погрешности от перекрестных связей, уменьшается нелинейность преобразования вследствие линеаризации функций преобразования элементов в цепи прямого преобразования мультисенсора и, следовательно, повышается точность измерения угловой скорости и линейного ускорения.
При выполнении пластин из монокристаллического материала типа кремния улучшается стабильность измерений мультисенсора вследствие высокой стабильности упругих свойств кремния, уменьшается температурная погрешность вследствие уменьшения температурных деформаций при применении в конструкции мультисенсора соединяемых узлов из однородного материала, поэтому повышается точность измерения угловой скорости и линейного ускорения.
На фиг. 1 приведен общий вид предлагаемого мультисенсора; на фиг. 2 показано выполнение первой пластины; на фиг. 3 - один из частных случаев выполнения первой пластины; на фиг. 4 - второй из частных случаев выполнения первой пластины; на фиг. 5 - вид второй пластины; на фиг. 6 - вид третьей пластины; на фиг. 7 - один из частных случаев выполнения второй пластины; на фиг. 8 - вид третьей пластины в соответствии с выполнением второй пластины на фиг. 7; на фиг. 9 - один из частных случаев выполнения первого чувствительного элемента; на фиг. 10 - вид частного случая выполнения второго чувствительного элемента, соответствующего выполнению первого чувствительного элемента на фиг. 9; на фиг. 11 - электрическая схема мультисенсора; на фиг. 12 - электрическая схема одного из частных случаев выполнения мультисенсора; на фиг. 13 - электрическая схема другого частного случая выполнения мультисенсора.
Мультисенсор (фиг. 1) содержит корпус 1 со стойкой 2, на которой установлены первая пластина 3, вторая пластина 4, третья пластина 5. Первая пластина 3 имеет две параллельные друг другу основные поверхности 6, 7 и утолщенные периферийные части 8', 8'', поверхности которых отстоят от основных поверхностей 6, 7 на расстоянии d. Мультисенсор закрыт крышкой 9.
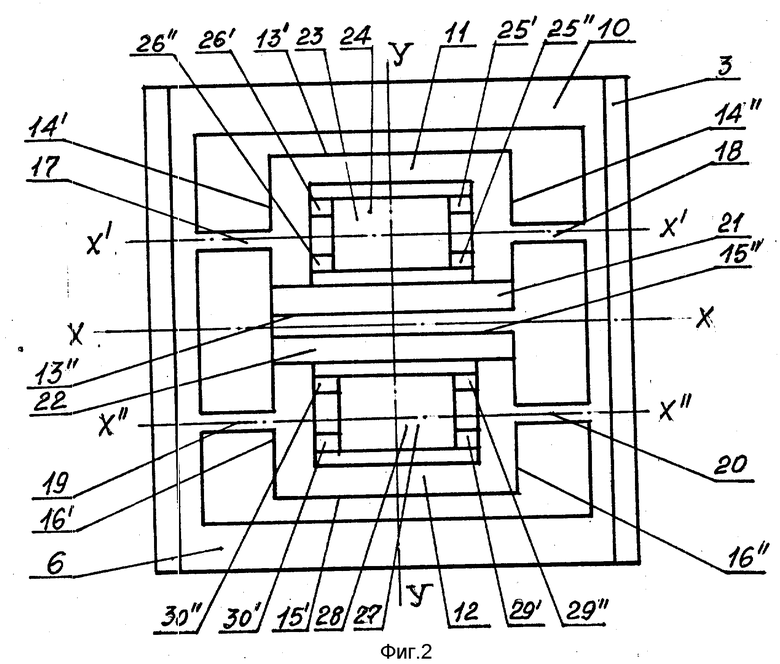
В первой пластине 3 с осью симметрии x-x (фиг. 2) выполнены внешняя рамка 10 и расположенные смежно в ее внутренней части внутренние рамки 11, 12. Внутренняя рамка 11 имеет одну пару внешних образующих 13', 13'', расположенных симметрично относительно первой оси x'-x', параллельной оси x-x и основным поверхностям 6, 7. Во второй паре внешних образующих внешние образующие 14', 14'' внутренней рамки 11 расположены симметрично относительно второй оси y-y, перпендикулярной первой оси x'-x'.
У внутренней рамки 12 выполнена одна пара внешних образующих 15', 15'', в которой внешние образующие 15', 15'' расположены симметрично относительно третьей оси x''-x'', параллельной первой оси x'-x'. Во второй паре внешние образующие 16', 16'' расположены симметрично относительно второй оси y-y.
Внутренние рамки 11, 12 расположены смежно друг с другом своими близлежащими внешними образующими 13'' и 15'' и с внешней рамкой 10 своими внешними образующими 13' и 15' из одной пары внешних образующих каждой внутренней рамки.
Внутренняя рамка 11 со стороны внешней образующей 14' пары внешних образующих 14', 14'', не являющихся смежными с внешними образующими 15', 15'' внутренней рамки 12, соединена растяжкой 17 с внешней рамкой 10. Внутренняя рамка 11 со стороны внешней образующей 14'' соединена растяжкой 18 с внешней рамкой 10.
Растяжки 17, 18 расположены продольно по направлению первой оси x'-x'.
Внутренняя рамка 12 со стороны внешней образующей 16' одной пары внешних образующих 16', 16'', не являющихся смежными с внешними образующими 13', 13'' внутренней рамки 11, соединена с внешней рамкой 10 растяжкой 19. Со стороны внешней образующей 16'' внутренняя рамка 12 соединена с внешней рамкой 10 растяжкой 20.
Растяжки 19, 20 расположены продольно по направлению третьей оси x''-x''.
Каждая из растяжек 17 ... 20 выполнена с жесткостью к изгибу по направлению второй оси y-y меньшей, чем жесткость к изгибу по направлению оси, перпендикулярной основным поверхностям 6, 7 первой пластины 3.
На внутренней рамке 11 выполнен подвижный электрод 21 одного электростатического силового преобразователя системы возбуждения колебаний.
На внутренней рамке 12 выполнен подвижный электрод 22 второго электростатического силового преобразователя системы возбуждения колебаний. Подвижные электроды 21, 22 расположены на частях внутренних рамок 11, 12, являющихся смежными друг с другом своими внешними образующими 13'' и 15''.
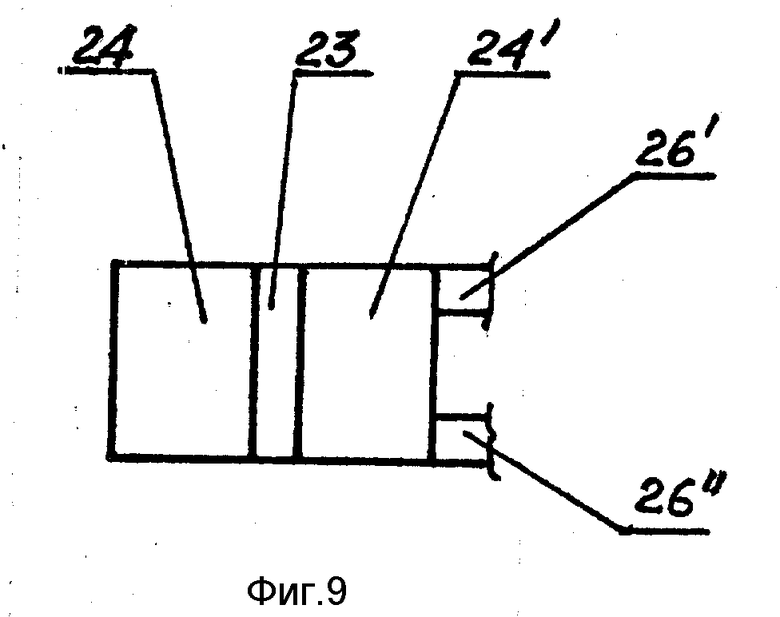
Во внутренней области внутренней рамки 11 расположен чувствительный элемент 23 с электропроводной площадкой 24, соединенный с внутренней рамкой 11 упругими перемычками 25', 25'' с одной стороны и упругими перемычками 26' и 26'' с другой стороны.
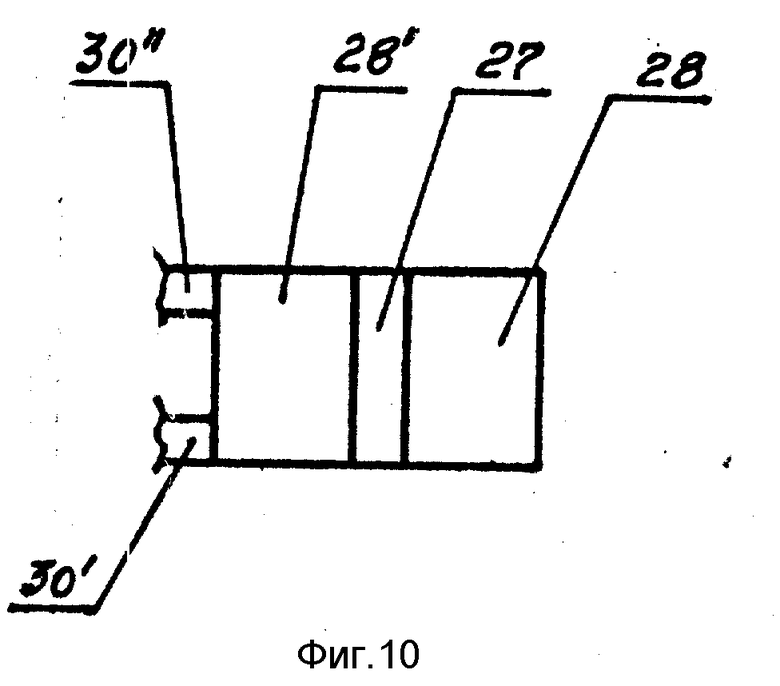
Во внутренней области внутренней рамки 12 выполнен чувствительный элемент 27 с электропроводной площадкой 28, соединенный с внутренней рамкой 12 упругими перемычками 29', 29'' с одной стороны и упругими перемычками 30', 30'' с другой стороны.
Подвижные электроды 21, 22 и электропроводные площадки выполнены с их расположением на каждой стороне каждой внутренней рамки и каждого чувствительного элемента.
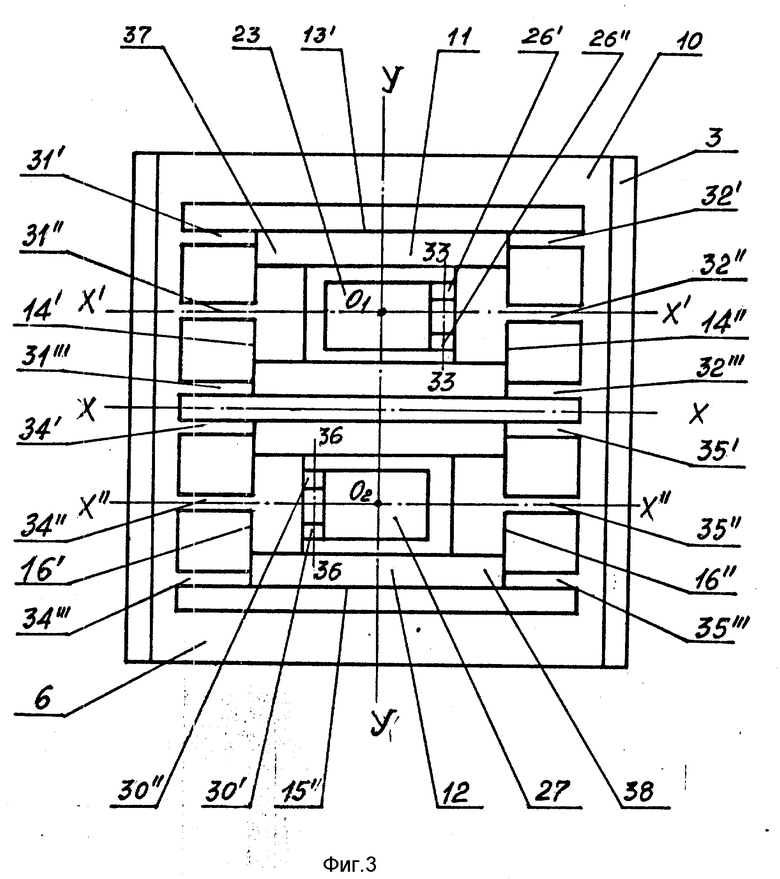
В одном частном случае выполнения мультисенсора в первой пластине 3 (фиг. 3) внутренняя рамка 11 соединена с внешней рамкой 10 со стороны внешней образующей 14' тремя растяжками 31', 31'', 31'''. Со стороны внешней образующей 14'' внутренняя рамка 11 соединена с внешней рамкой 10 растяжками 32', 32'', 32'''. Растяжки 31'', 32'' расположены по первой оси x'-x', растяжки 31', 31''', 32', 32''' - симметрично относительно первой оси x'-x'.
Чувствительный элемент 23 соединен с внутренней рамкой 11 упругими перемычками 26', 26'' с одной стороны. Осями изгиба упругих перемычек 26', 26'' образована ось подвеса 33-33. Центр масс O1 чувствительного элемента 23 расположен по оси x'-x' вне оси подвеса 33-33.
Внутренняя рамка 12 соединена с внешней рамкой 10 со стороны внешней образующей 16' растяжками 34', 34'', 34''', а со стороны внешней образующей 16'' - растяжками 35', 35'', 35'''. Растяжки 34'', 35'' расположены по третьей оси x''-x'', а растяжки 34', 34''', 35', 35''' - симметрично относительно оси x''-x''.
Чувствительный элемент 27 соединен с одной стороны с внутренней рамкой 12 упругими перемычками 30', 30'', осями изгиба которых образована ось подвеса 36-36. Центр масс O2 чувствительного элемента 27 расположен по оси x''-x'' вне оси подвеса 36-36.
Оси подвеса 33-33 и 36-36 расположены по направлению второй оси y-y, параллельны второй оси y-y и расположены симметрично относительно нее.
На части внутренней рамки 11 со стороны ее внешней образующей 13', смежной с внешней рамкой 10, выполнен подвижный электрод 37 первого дополнительного электростатического силового преобразователя системы возбуждения колебаний. На части внутренней рамки 12 со стороны ее внешней образующей 15', смежной с внешней рамкой 10, выполнен подвижный электрод 38 второго дополнительного электростатического силового преобразователя системы возбуждения колебаний.
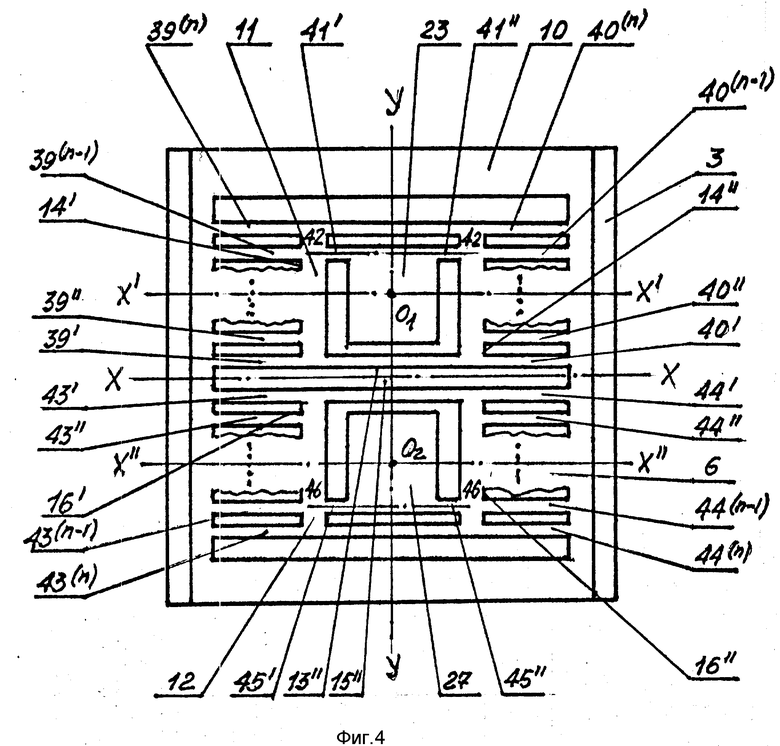
В общем случае выполнения n растяжек с каждой стороны каждой внутренней рамки (фиг. 4) растяжками 39', 39'' ... 39(n) соединена внешняя образующая 14' внутренней рамки 11 с внешней рамкой 10, растяжками 40', 40'' ... 40(n) соединена внешняя образующая 14'' внутренней рамки 11 с внешней рамкой 10.
С одной стороны чувствительного элемента 23 по разные стороны от оси y-y выполнены упругие перемычки 41', 41'', работающие на кручение. Осями кручения упругих перемычек 41', 41'' образована ось подвеса 42-42 чувствительного элемента 23.
Внутренняя рамка 12 соединена с внешней рамкой 10 со стороны внешней образующей 16' растяжками 43', 43'' ... 43(n) и растяжками 44', 44'' ... 44(n) со стороны внешней образующей 16''.
Чувствительный элемент 27 с одной своей стороны соединен с внутренней рамкой 12 упругими перемычками 45', 45'', осями кручения которых образована ось подвеса 46-46 чувствительного элемента 27.
Ось подвеса 42-42 расположена по направлению первой оси x'-x', ось подвеса 46-46 расположена по направлению третьей оси x''-x''. Оси подвеса 42-42 и 46-46 расположены параллельно и симметрично относительно оси симметрии x-x первой пластины 3, проходящей между внешней образующей 13'' внутренней рамки 11 и внешней образующей 15'' внутренней рамки 12, являющимися смежными.
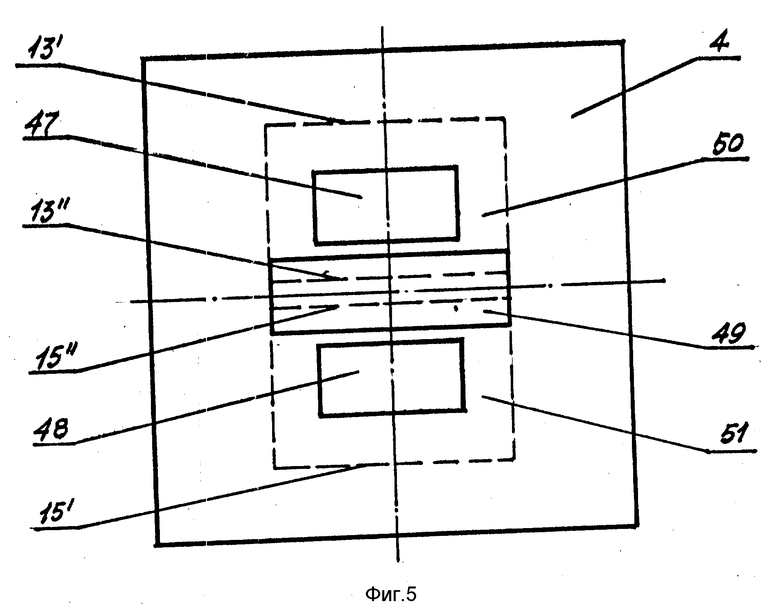
На второй пластине 4 (фиг. 5) выполнены первый неподвижный электрод 47 емкостного преобразователя положения первого чувствительного элемента 23, первый неподвижный электрод 48 емкостного преобразователя положения второго чувствительного элемента 27 и первая часть 49 общего неподвижного электрода электростатических силовых преобразователей системы возбуждения колебаний. Первая часть 49 общего неподвижного электрода расположена в области проекции 50, 51 на вторую пластину 4 внутренних рамок 11, 12 в тех их общих частях, принадлежащих областям внутренних рамок 11, 12, которые расположены смежно по своим внешним образующим 13'', 15''.
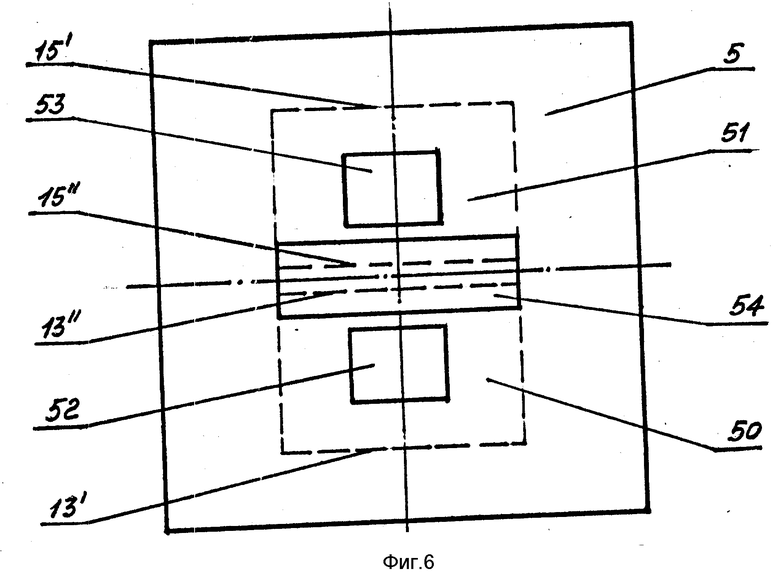
На третьей пластине 5 (фиг. 6) выполнены второй неподвижный электрод 52 емкостного преобразователя положения первого чувствительного элемента 23, второй неподвижный электрод 53 емкостного преобразователя положения второго чувствительного элемента 27 и вторая часть 54 общего неподвижного электрода электростатических силовых преобразователей системы возбуждения колебаний. Вторая часть 54 общего неподвижного электрода расположена в области проекции 50, 51 на третью пластину 5 внутренних рамок 11, 12 в тех их частях, принадлежащих областям внутренних рамок 11, 12, которые расположены смежно по своим внешним образующим 13'', 15''.
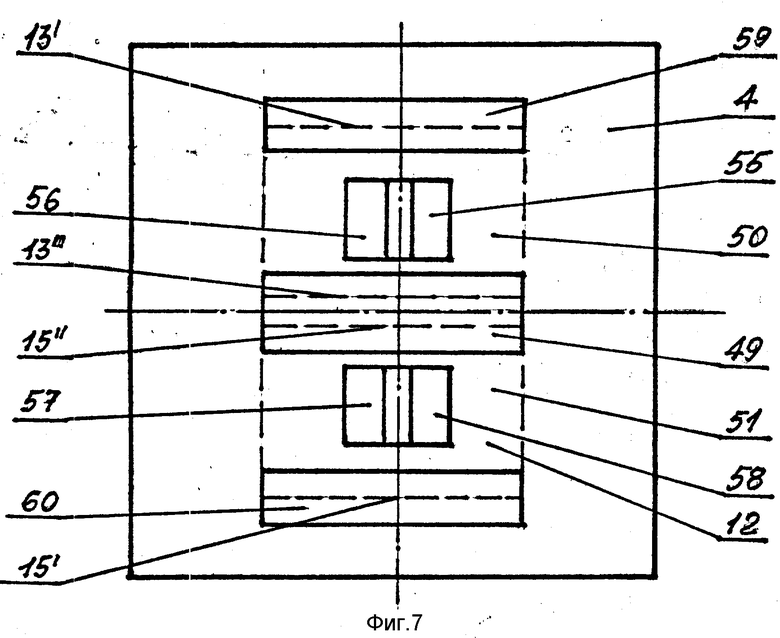
В частном случае выполнения мультисенсора (фиг. 7), соединенного с частным случаем в соответствии с фиг. 3, на второй пластине 4 в области проекции на нее первого чувствительного элемента 23 выполнены неподвижный электрод 55 емкостного преобразователя положения чувствительного элемента 23 и неподвижный электрод 56 дифференциального электростатического силового преобразователя системы силовой компенсации. В области проекции на вторую пластину 4 второго чувствительного элемента 27 выполнены неподвижный электрод 57 емкостного преобразователя положения чувствительного элемента 27 и неподвижный электрод 58 дифференциального электростатического силового преобразователя системы силовой компенсации.
В области проекции 50 на вторую пластину 4 внутренней рамки 11 в той ее части, которая прилегает к внешней образующей 13', смежной с внешней рамкой 10, выполнена первая часть 59 первого неподвижного электрода дополнительных электростатических силовых преобразователей системы возбуждения колебаний. В области проекции 51 в той же ее части, которая прилегает к внешней образующей 15', смежной с внешней рамкой 10, расположена первая часть 60 второго неподвижного электрода дополнительных электростатических силовых преобразователей.
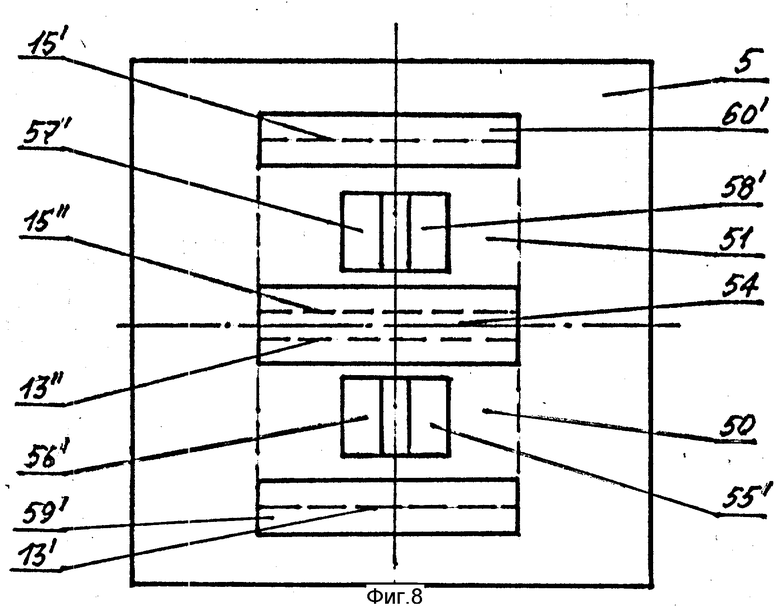
На третьей пластине 5 (фиг. 8) аналогично с предыдущим частным случаем выполнения расположены неподвижный электрод 55' емкостного преобразователя положения чувствительного элемента 23, неподвижный электрод 57' емкостного преобразователя положения чувствительного элемента 27, неподвижные электроды 56', 58' дифференциальных электростатических силовых преобразователей системы силовой компенсации, а также вторая часть 59' первого неподвижного электрода дополнительных электростатических силовых преобразователей системы возбуждения колебаний и вторая часть 60' второго неподвижного электрода дополнительных электростатических силовых преобразователей.
Подвижные электроды 21, 22 расположены относительно неподвижных электродов 49, 54 электростатических силовых преобразователей системы возбуждения колебаний так, что контур каждого из неподвижных электродов 49, 54 частично покрывает общий контур подвижных электродов 21, 22. Подвижные электроды 36, 37 расположены относительно частей неподвижных электродов 59, 59', 60, 60' дополнительных электростатических силовых преобразователей системы возбуждения колебаний так, что контуры частей 59, 59' одного неподвижного электрода частично покрывают контур подвижного электрода 37, контуры частей 60, 60' другого неподвижного электрода частично покрывают контур подвижного электрода 38. При этом в одном частном выполнении мультисенсора (фиг. 3, 7, 8) контуры частей 59, 59' одного неподвижного электрода смещены относительно контура подвижного электрода 37 в сторону одной периферийной части второй 4 и третьей 5 пластин, контуры частей 60, 60' второго неподвижного электрода смещены относительно контура подвижного электрода 38 в сторону другой периферийной части второй 4 и третьей 5 пластин.
В случае выполнения мультисенсора в соответствии с фиг. 7, 8 на первом чувствительном элементе 23 в дополнение к электропроводной площадке 24 образована электропроводная площадка 24' (фиг. 9). На втором чувствительном элементе 27 дополнительно выполнена электропроводная площадка 28' (фиг. 10).
При выполнении первой пластины 3 из электропроводного материала роль подвижных электродов 21, 22, 37, 38 и электропроводных площадок 24, 28 чувствительных элементов 23, 27 выполняет электропроводная поверхность первой пластины 3. При изготовлении второй 4 и третьей 5 пластин из электроизоляционного материала части 49, 54, 59, 59', 60, 60' неподвижных электродов электростатических силовых преобразователей системы возбуждения колебаний неподвижные электроды 47, 48, 52, 53, 55, 55', 57, 57' емкостных преобразователей положения чувствительных элементов 23, 27, неподвижные электроды 56, 56', 58, 58' дифференциальных электростатических силовых преобразователей системы силовой компенсации могут быть выполнены путем напыления электропроводного материала, например алюминия.
Если в качестве материала первой пластины 3 используется монокристаллический кремний, то внешняя рамка 10, внутренние рамки 11, 12, чувствительные элементы 23, 27, растяжки 39', 39' ... 39(n), 40', 40'' ... 40(n), 43', 43'' . .. 43(n), 44', 44'' ... 44(n), упругие перемычки 25, 25'', 26, 26'', 29, 29'', 30, 30'', 41', 42'', 45', 45'' образуются путем анизотропного травления кремния. При этом подвижные электроды 21, 22, 37, 38, электропроводные площадки 24, 28 чувствительных элементов 23, 27 могут быть выполнены в виде электропроводных поверхностей 6, 7 первой пластины 3 путем легирования кремния, например, бором или могут быть образованы путем напыления электропроводного материала, например алюминия, на окисленную поверхность кремниевой первой пластины 3. Аналогично путем напыления могут быть выполнены неподвижные электроды на второй 4 и третьей 5 пластинах при изготовлении их из кремния.
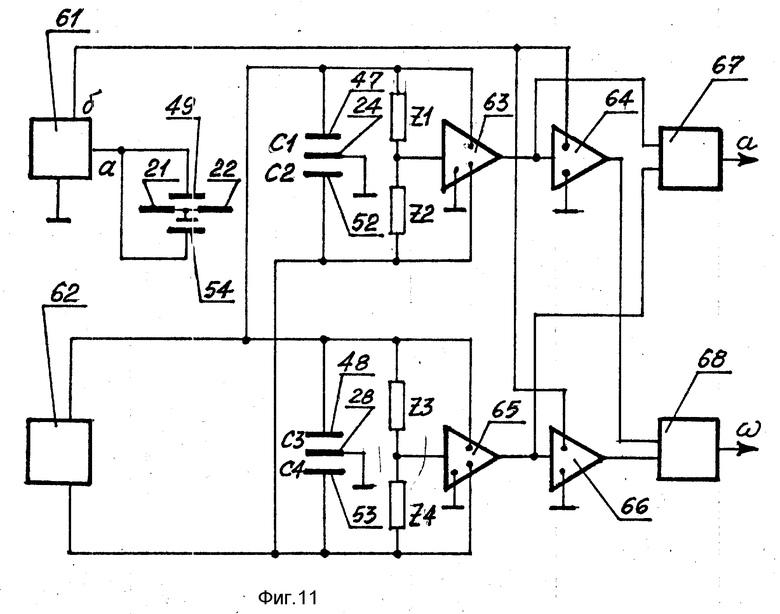
К выходу "а" генератора 61 (фиг. 11) с выходным сигналом первой частоты f1 подключены первая часть 49 и вторая часть 54 общего неподвижного электрода электростатических силовых преобразователей системы возбуждения колебаний. К общей цепи генератора 61 подключены подвижный электрод 21 первого электростатического силового преобразователя и подвижный электрод 22 второго электростатического силового преобразователя. С выхода "а" генератора 61 поступают однополярные сигналы с частотой следования f1.
К выходу генератора питания 62 с выходным сигналом второй частоты f2 подключен емкостный преобразователь положения первого чувствительного элемента 23, содержащий конденсаторы C1, C2 и комплексные сопротивления Z1, Z2. Конденсатор C1 образован неподвижным электродом 47 и электропроводной площадкой 24 чувствительного элемента 23, конденсатор C2 образован неподвижным электродом 52 и электропроводной площадкой 24.
Выход емкостного преобразователя положения первого чувствительного элемента 23 соединен с входом усилителя 63 с первым демодулятором сигнала второй частоты. К выходу усилителя 63 подключен вход второго демодулятора 64 сигнала первой частоты.
Емкостный преобразователь положения чувствительного элемента 27, содержащий конденсаторы C3, C4 и комплексные сопротивления Z3, Z4, подключен к выходу генератора питания 62. Конденсатор C3 образован неподвижным электродом 48 и электропроводной площадкой 28 чувствительного элемента 27, конденсатор C4 образован неподвижным электродом 53 и электропроводной площадкой 28. К выходу емкостного преобразователя положения чувствительного элемента 27 подсоединен вход усилителя 65 с первым демодулятором сигнала второй частоты, выход которого соединен с входом второго демодулятора 66 сигнала первой частоты.
Выходы усилителей 63, 65 с первыми демодуляторами сигналов второй частоты подключены к входам сумматора 67. Выход одного из вторых демодуляторов 64, 66 сигналов первой частоты подключен к прямому входу устройства вычитания 68, выход другого из вторых демодуляторов 64, 66 подключен к инверсному входу устройства вычитания 68.
В генераторе 61 предусмотрен выход "б", обеспечивающий поступление опорного разнополярного сигнала с частотой f1 на демодуляторы 64, 66. Опорное напряжение от генератора питания 62 с частотой f2 подается на демодуляторы усилителей 63, 65.
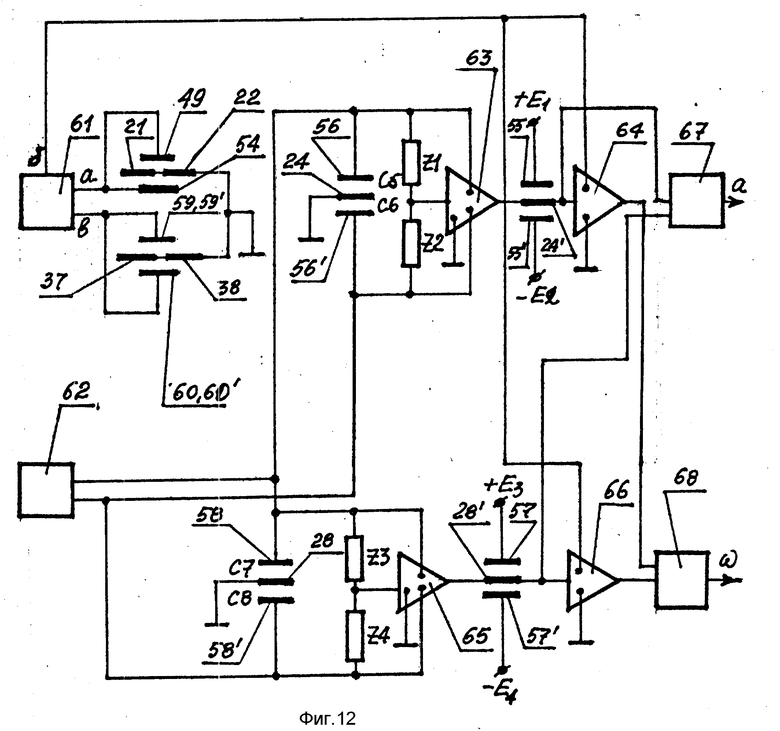
В частном случае выполнения мультисенсора (фиг. 12) в генераторе 61 образован второй выход "в" для питания системы возбуждения колебаний, к которому подключены дополнительные силовые преобразователи системы возбуждения колебаний. Выход "в" подключен к соединенным вместе частям 59, 59' первого неподвижного электрода и соединенным вместе частям 60, 60' второго неподвижного электрода. Общая цепь выхода генератора 61 подключена к соединенным вместе подвижным электродом 37 первого дополнительного электростатического силового преобразователя и подвижным электродом 38 второго дополнительного электростатического силового преобразователя.
С выхода "в" генератора 61 поступают однополярные сигналы с частотой f1 с фазой, отличающейся на 180o от фазы сигналов с выхода "а".
В емкостный преобразователь положения первого чувствительного элемента 23 включены конденсатор C5, образованный неподвижным электродом 56 и электропроводной площадкой 24, и конденсатор C6, образованный неподвижным электродом 56' и электропроводной площадкой 24.
К выходу усилителя 63 подключен первый дифференциальный электростатический силовой преобразователь системы силовой компенсации, состоящий из электропроводной площадки 24' на первом чувствительном элементе 23 и неподвижных электродов 55, 55'. К неподвижному электроду 55 подключен плюсовый выход источника питания E1 постоянного тока, к неподвижному электроду 55' подключен минусовый выход источника E2 постоянного тока.
В емкостный преобразователь положения второго чувствительного элемента 27 включены конденсатор C7, образованный неподвижным электродом 58 и электропроводной площадкой 28, а также конденсатор C8, образованный неподвижным электродом 58' и электропроводной площадкой 28.
К выходу усилителя 65 подключен второй дифференциальный электростатический силовой преобразователь системы силовой компенсации, состоящий из электропроводной площадки 28' на втором чувствительном элементе 27 и неподвижных электродов 57, 57'. К неподвижному электроду 57 подключен плюсовый выход источника питания E3 постоянного тока, к неподвижному электроду 57' подключен минусовый выход источника питания E4 постоянного тока.
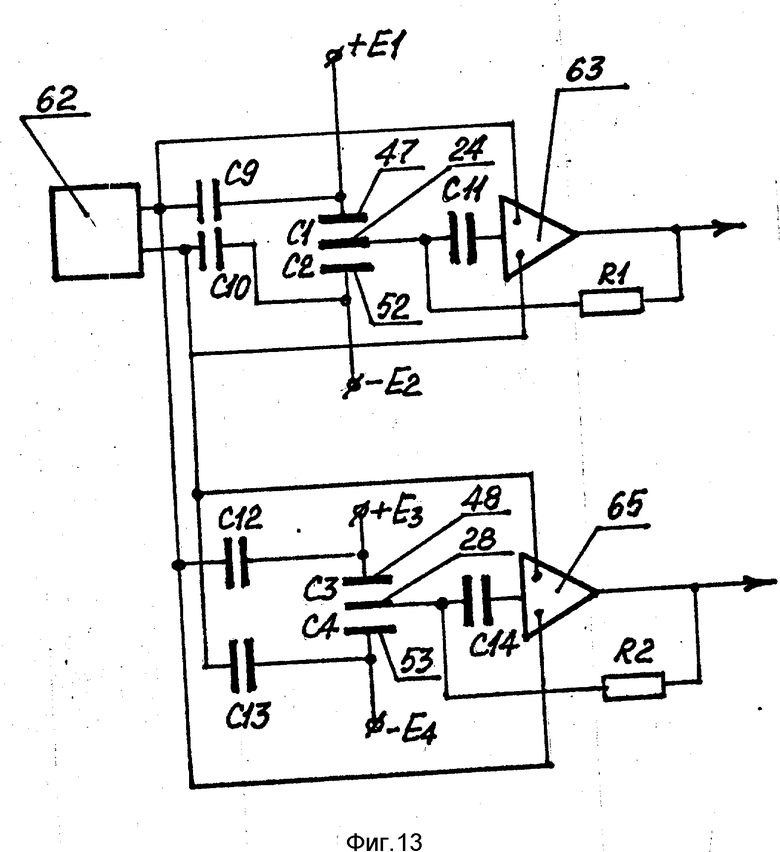
В электрической схеме (фиг. 13) выход генератора питания 62 подключен посредством блокировочного конденсатора C9 к неподвижному электроду 47 емкостного преобразователя положения первого чувствительного элемента 23, а также с помощью блокировочного конденсатора C10 к неподвижному электроду 52. Электропроводная площадка 24 на первом чувствительном элементе 23 подключена к входу усилителя 63 через блокировочный конденсатор C11. Выход усилителя 63 посредством резистора обратной связи R1 подключен к электропроводной площадке 24. Источник питания E1 подключен к неподвижному электроду 47, источник питания E2 - к неподвижному электроду 52.
Выход генератора питания 62 также при помощи блокировочных конденсаторов C12, C13 подключен к неподвижным электродам 48, 53 емкостного преобразователя положения второго чувствительного элемента 27. Электропроводная площадка 28 на втором чувствительном элементе 27 через блокировочный конденсатор C14 подключена к входу усилителя 65, выход которого посредством резистора обратной связи R2 соединен с электропроводной площадкой 28. Источник питания E3 подключен к неподвижному электроду 48, а источник питания E4 - к неподвижному электроду 53.
Мультисенсор работает следующим образом (фиг. 2, 11). При наличии однополярного сигнала на выходе "а" генератора 61 в одном электростатическом силовом преобразователе системы возбуждения колебаний, содержащем неподвижные электроды 49, 54 и подвижный электрод 21 на внутренней рамке 11, создается действующая на внутреннюю рамку 11 сила, которая втягивает внутреннюю рамку 11 под неподвижные электроды 49, 54 по направлению к оси x-x. В другом электростатическом силовом преобразователе, содержащем неподвижные электроды 49, 54 и подвижный электрод 22 на внутренней рамке 12, создается действующая на внутреннюю рамку 12 сила, втягивающая внутреннюю рамку 12 под неподвижные электроды 49, 54 по направлению к оси x-x. Так как внутренние рамки 11, 12 расположены по разные стороны от оси x-x, то за счет изгибных деформаций по направлению оси y-y растяжек 17, 18, 19, 20 обеспечиваются поступательные перемещения внутренних рамок 11, 12 вдоль оси y-y в разных направлениях.
Во время отсутствия выходного сигнала на выходе "а" генератора 61 вследствие действия упругих сил растяжек 17, 18, 19, 20 внутренние рамки 11, 12 возвращаются в исходное положение и по инерции переходят в другие крайние положения, отстоящие от оси x-x в направлении периферийной части первой пластины 3.
Таким образом в системе возбуждения колебаний обеспечиваются колебательные поступательные движения внутренних рамок 11, 12 с частотой f1 с одинаковой скоростью, но с разным направлением вектора скорости внутренних рамок 11, 12 по сравнению друг с другом.
При наличии угловой скорости омега, вектор которой направлен по оси x-x, первый чувствительный элемент 23 приобретает поворотное ускорение an1, второй чувствительный элемент 27 - поворотное ускорение an2. Векторы поворотных ускорений an1, an2 направлены в разные стороны по перпендикулярной основным поверхностям 6, 7 первой пластины 3 оси.
Под действием сил, вызванных поворотными ускорениями an1, an2, происходят перемещения в разных направлениях первого чувствительного элемента 23 и второго чувствительного элемента 27. Пусть направление вектора угловой скорости таково, что для одного момента времени происходит сближение первого чувствительного элемента 23 с неподвижным электродом 47 и сближение второго чувствительного элемента 27 с неподвижным электродом 53. Тогда емкость конденсатора C1 увеличивается, емкость конденсатора C2 уменьшается, с выхода емкостного преобразователя положения первого чувствительного элемента 23 на вход усилителя 63 поступает сигнал такой величины и фазы, которые определяются величиной угловой скорости и направлением вектора угловой скорости. После усиления сигнала в усилителе 63 и преобразования в первом демодуляторе на выходе усилителя 63 получается переменное напряжение первой частоты, так как модуль вектора линейной скорости внутренней рамки 11 изменяется по периодическому закону. После преобразования во втором демодуляторе 64 на его выходе получается напряжение постоянного тока U1, величина и полярность которого зависят от величины угловой скорости и направления ее вектора
U1= K1an1= 2K1vω, (1)
где K1 - коэффициент преобразования мультисенсора по угловой скорости;
v - амплитуда поступательной скорости внутренних рамок 11, 12.
Одновременно емкость конденсатора C3 уменьшается, емкость конденсатора C4 увеличивается, с выхода емкостного преобразователя положения второго чувствительного элемента 27 на вход усилителя 65 поступает сигнал такой величины и фазы, что после его усиления и преобразования в усилителе 65 и втором демодуляторе 66 на выходе второго демодулятора 66 получается выходное напряжение постоянного тока U2
U2= K1an2=-2K1vω, (2)
После вычитания сигналов с выходов вторых демодуляторов 64, 66 в устройстве вычитания 68 получается
Uω= U2- U1= 4K1vω, (3)
где Uω - выходной сигнал мультисенсора по угловой скорости.
Таким образом, выходной сигнал мультисенсора после устройства вычитания 68 пропорционален угловой скорости.
При наличии линейного ускорения по измерительной оси мультисенсора, перпендикулярной основным поверхностям 6, 7 первой пластины 3, под действием инерционных сил, вызванных линейным ускорением, происходит перемещение чувствительных элементов 23, 27 в одном и том же направлении. Если направление вектора ускорения таково, что чувствительные элементы при перемещении сближаются с второй пластиной 4, то емкости конденсаторов C1, C3 увеличиваются, емкости конденсаторов C2, C4 уменьшаются, и с выхода емкостного преобразователя положения чувствительного элемента 23 поступает сигнал на вход усилителя 63, а с выхода емкостного преобразователя положения чувствительного элемента 27 сигнал поступает на вход усилителя 65.
При наличии угловой скорости и линейного ускорения в результате усиления и преобразования входного сигнала усилителя 63 на его выходе получается выходное напряжение U3, которое содержит составляющую постоянного тока, определяемую линейным ускорением, и составляющую переменного тока, определяемую угловой скоростью
U3= K2(a + an1) = K2(a + 2vωsin2πf1t), (4)
где K2 - коэффициент преобразования мультисенсора по ускорению;
a - линейное ускорение;
t - время.
В этом случае на выходе усилителя 65 получается выходное напряжение U4
U4= K2(a + an2) = K2(a - 2vωsin2πf1t), (5)
После суммирования сигналов с выходов усилителей 63, 65 в сумматоре 67 на его выходе образуется сигнал Ua линейного ускорения, измеряемого мультисенсором
Ua=U3+U4=2K2a (6)
Отсюда следует, что выходной сигнал мультисенсора после сумматора 67 пропорционален линейному ускорению.
Таким образом, с помощью мультисенсора производится измерение угловой скорости и линейного ускорения.
В мультисенсоре в соответствии с фиг. 3, 4, 12 поступательные перемещения внутренних рамок 11, 12 вдоль оси y-y осуществляются за счет изгибных деформаций растяжек 31', 31'', 31''', 32', 32'', 32''', 34', 34'', 34''', 35', 35'', 35''' (фиг. 3) или растяжек 39' ... 39(n), 40' ... 40(n), 43' ... 43(n), 44' ... 44(n). При этом после прекращения сигнала с выхода "а" генератора 61 появляется сдвинутый по фазе на 180o по сравнению с сигналом на выходе "а" однополярный сигнал на втором выходе "в" генератора 61. Тогда подвижные электроды 37, 38 втягиваются под части неподвижных электродов 59, 59', 60, 60', и внутренние рамки 11, 12 поступательно перемещаются в направлении к противоположным периферийным частям первой пластины 3. Таким образом, с помощью основных и дополнительных электростатических силовых преобразователей осуществляется возбуждение колебаний подвижных рамок 11, 12 попеременно в двух противоположных направлениях.
При наличии угловой скорости и линейного ускорения на каждый чувствительный элемент 23, 27 действует сила Fм
Fм=m(a+an), (7)
где m - масса каждого чувствительного элемента 23, 27;
an - поворотное ускорение.
Силы Fм вызывают угловые перемещения чувствительных элементов 23, 27. При этом изменяются емкости C5, C6, с выхода емкостного преобразователя положения первого чувствительного элемента 23 поступает сигнал на вход усилителя 63. После его преобразования в усилителе 63 выходное напряжение U5 усилителя 63 подается на электропроводную площадку 24' на чувствительном элементе 23. В результате на первый чувствительный элемент 23 действуют две противоположно направленные силы Fк1, Fк2
где ε - относительная диэлектрическая проницаемость среды;
ε0 - абсолютная диэлектрическая проницаемость;
S - площадь каждого из неподвижных электродов 55, 55', 57, 57';
E1 - напряжение источника постоянного тока, подключенного к неподвижному электроду 55;
d - расстояние между каждым чувствительным элементом 23, 27 и неподвижными электродами из числа 55, 55', 57, 57';
где E2 - напряжение источника питания, подключенного к неподвижному электроду 55'.
Примем, что
E1=E2=E (10)
Тогда на чувствительный элемент 23 действует результирующая компенсационная сила Fк
С помощью компенсационной силы Fк уравновешивается действие силы Fм, т. е.
Fм=Fк
В результате подстановки в (12) выражений (7), (11) и преобразования получается .
.
Таким образом, выходное напряжение усилителя 63 пропорционально сумме линейного и поворотного ускорений.
Аналогичным образом изменяются емкости C7, C8, с выхода емкостного преобразователя положения второго чувствительного элемента 27 поступает сигнал на вход усилителя 65, выходное напряжение которого подается на электропроводную площадку 28' на втором чувствительном элементе 27. В результате создается электростатическая компенсационная сила, действующая на второй чувствительный элемент 27 и уравновешивающая силу, вызванную линейным и поворотным ускорениями. Выходное напряжение усилителя 65, так же как и в предыдущем случае, пропорционально сумме линейного и поворотного ускорений.
После преобразования выходных напряжений усилителей 63, 65 с помощью вторых демодуляторов 64, 66, сумматора 67 и устройства вычитания 68 получаются выходные сигналы мультисенсора, пропорциональные угловой скорости и линейному ускорению.
В мультисенсоре в соответствии с фиг. 13 сигнал с емкостного преобразователя положения первого чувствительного элемента 23 вследствие изменения емкостей C1, C2 при наличии угловой скорости и линейного ускорения подается на вход усилителя 63. Компенсационная сила создается путем подачи выходного напряжения усилителя 63 на электропроводную площадку 24 на первом чувствительном элементе 23.
Аналогично компенсационная сила для уравновешивания действующей на второй чувствительный элемент 27 силы, создаваемой линейным и поворотным ускорениями, обеспечивается путем подачи выходного сигнала емкостного преобразователя положения на усилитель 65 и выходного сигнала усилителя 65 на электропроводную площадку 28 на втором чувствительном элементе 27.
В мультисенсоре (фиг. 3, 4, 11) при одновременном наличии измеряемого линейного ускорения и боковых ускорений, векторы которых направлены по осям x-x или y-y, угловые перемещения чувствительных элементов 23, 27 при наличии измеряемого ускорения дополняются угловыми перемещениями от боковых ускорений. При этом если направление вектора бокового ускорения таково, что угловое перемещение первого чувствительного элемента 23 увеличивается, то угловое перемещение второго чувствительного элемента 27 уменьшается. В результате выходное напряжение усилителя 63 увеличивается, выходное напряжение усилителя 65 уменьшается, и после суммирования этих выходных напряжений в сумматоре 67 выходной сигнал мультисенсора, определяющий величину измеряемого линейного ускорения, остается неизменным.
Источники информации
1. Патент США N 4744248, кл. G 01 P 9/04, 75/505, 73/510. Мультисенсор с вибрирующими акселерометрами. 1988.
2. Патент США N 4750364, кл. G 01 P 15/08. Датчик угловой скорости и линейного ускорения. 1989 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ПЕРВИЧНОЙ ИНФОРМАЦИИ | 1993 |
|
RU2046350C1 |
| ГРАВИМЕТР | 1996 |
|
RU2096813C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2000 |
|
RU2167426C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2000 |
|
RU2178569C1 |
| ВИБРАЦИОННЫЙ ГИРОСКОП | 1993 |
|
RU2098761C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2002 |
|
RU2216713C2 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1998 |
|
RU2149412C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1998 |
|
RU2149411C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1998 |
|
RU2137141C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1998 |
|
RU2140652C1 |
Использование: в области измерительной техники. Техническим результатом изобретения является повышение точности измерения угловой скорости и линейного ускорения. Сущность изобретения: в мультисенсоре, содержащем корпус, первую, вторую и третью пластины, два чувствительных элемента, систему возбуждения колебаний с электростатическими силовыми преобразователями, емкостные преобразователи положения и генератор их питания, два усилителя с первым демодулятором в каждом, два вторых демодулятора, сумматор и устройство вычитания, в первой пластине выполнена внешняя рамка и две внутренние рамки, внутренние рамки соединены с каждой из двух сторон с внешней рамкой n (n=1, 2 ...) растяжками, чувствительный элемент выполнен в каждой внутренней рамке, подвижные электроды электростатических силовых преобразователей системы возбуждения колебаний в первой пластине выполнены на частях внутренних рамок, смежных друг с другом, неподвижные электроды электростатических силовых преобразователей на второй и третьей пластинах выполнены в области общей проекции на эти пластины подвижных электродов на внутренних рамках. 8 з.п. ф-лы, 13 ил.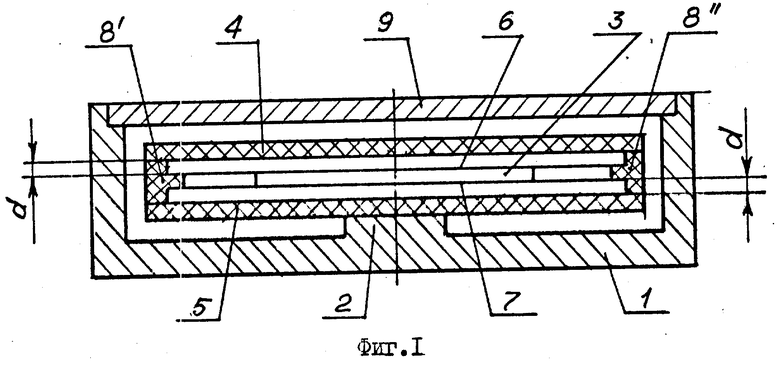
| US, патент, 4744248, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| GB, патент, 2156523, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| RU, патент, 2018133, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US, патент, 4750364, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
