Изобретение относится к технической кибернетике и предназначено для регулирования режима работы жидкостного ракетного двигателя (ЖРД) с помощью вычислительных устройств.
Известен способ управления ЖРД с использованием ЭВМ [1].
Также известен способ регулирования режима работы ЖРД, заключающийся в изменении проходного сечения регулирующего органа в зависимости от величины измеренных давлений на входе [2], наиболее близкий к предлагаемому. Регулирование ЖРД по известному способу ограничивает скорость увеличения проходного сечения регулирующего органа и от падения давления на входе в двигатель при его форсировании по сигналу от системы управления ракеты.
При применении известного способа величина кавитационного запаса не контролируется и не поддерживается, что не исключает снижение кавитационного запаса ниже допустимого и приводит к возникновению аварийной ситуации, связанной с возгоранием двигателя при кавитационном срыве насоса. С целью исключения указанного выбирают расчетное значение давления в баках ракеты таким, чтобы обеспечить наличие достаточного резерва по давлению кавитационного срыва на всех режимах эксплуатации двигателя. Это приводит к неоправданным дополнительным энергетическим затратам, связанным с увеличением прочности и веса баков и газа наддува. Кроме того, наличие резерва давления в баках не исключает возникновения аварийной ситуации при различного рода неисправных состояниях системы питания и системы термостатирования, что приводит к потере работоспособности двигателя.
Задачей данного изобретения является исключение указанных недостатков, повышение энергетических характеристик за счет снижения величины давления в баках ракеты и обеспечение работоспособности двигателя при неисправности системы питания и термостатирования.
Эта задача решается за счет того, что измеряют дополнительно расходы и температуры компонентов топлива на входе в двигатель и обороты вала турбонасосного агрегата, определяют и фиксируют значение кавитационного запаса давления, сравнивают его с допустимой для данного режима величиной и при снижении кавитационного запаса ниже допустимого изменения проходного сечения регулирующего органа двигателя ведут до режима, обеспечивающего потребную величину кавитационного запаса.
Положительный эффект при использовании предлагаемого способа достигается тем, что при недопустимом снижении давления в баках или повышении температуры топлива двигатель переводят на режим, при котором его работоспособность сохраняется.
Сущность изобретения поясняется чертежом, где представлена функциональная схема устройства, осуществляющая предлагаемый способ.
Сущность предлагаемого способа заключается в следующей последовательности операций.
После выхода двигателя на режим главной ступени тяги постоянно измеряют давления, температуры и расходы компонентов топлива на входе в двигатель и обороты вала турбонасосного агрегата (ТНА). По зависимости (1) определяют значение кавитационного запаса давления
где ΔPкав - кавитационный запас давления;
Pвх.изм. - измеренное значение давления на входе в двигатель; относительная величина критического кавитационного запаса, соответствующего началу кавитационного срыва насоса по срывной кавитационной характеристике, полученной при модельных проливках.
относительная величина критического кавитационного запаса, соответствующего началу кавитационного срыва насоса по срывной кавитационной характеристике, полученной при модельных проливках.
nизм - измеренное значение оборотов вала турбонасосного агрегата;
ρ - плотность топлива;
Pn - давление пара в кавитационной каверне;
Cвх - скорость потока на входе в насос.
Для каждого момента времени сравнивают полученное значение кавитационного запаса с допустимой величиной. При снижении величины кавитационного запаса ниже допустимой величины регулируют проходное сечение регулирующего органа, переводя двигатель на режим, при котором давление, соответствующее началу кавитационного срыва насоса, снижается, и кавитационный запас двигателя возрастает.
Величина изменения режима и его знак будут зависеть от режима работы двигателя и вида кавитационной характеристики насоса, которая описывается зависимостью
где Q - объем расхода через насос;
a0, a1, a2 - коэффициенты апроксимации кавитационной характеристики.
При работе на восходящей ветки кавитационной характеристики, по режиму Q/n изменение режима работы ведут в сторону дросселирования, т.е. уменьшения проходного сечения регулирующего органа газогенератора, обеспечивая таким образом снижение интенсивности кавитационных образований на входе в насос и обеспечивая работоспособность двигателя.
Применение способа позволяет таким образом снизить величину давления в баках за счет резерва и обеспечить работоспособность двигателя при неисправностях системы питания.
В процессе эксплуатации ракеты в результате взаимодействия системы испытания и двигателя при определенных условиях возникают продольные или кавитационные автоколебания, которые могут привести к разрушению ракеты и невыполнению задачи полета. Изменение режима работы двигателя или кавитационного запаса давления перед насосами изменяет динамические характеристики контура и позволяет обеспечить затухание автоколебаний.
Для повышения устойчивости двигателя к продольным и кавитационным колебаниям дополнительно анализируют частоту и амплитуду колебаний давления на входе в двигатель и в случае развития (увеличение амплитуды) колебаний изменения проходного сечения регулирующего органа ведут в сторону установления режима работы, обеспечивающего затухание автоколебаний.
Изменение величины кавитационного запаса приводит к изменению объема кавитационных каверн на входе в насос, что изменяет частоту низкочастотных колебаний. Поэтому при возникновении автоколебаний в контуре системы питания - двигатель изменение режима работы двигателя способствует затуханию амплитуды и колебаний, повышению устойчивости системы. Различные низкочастотные колебания возникают, как правило, на коротких участках полета. При достаточной с точки зрения работоспособности двигателя величине кавитационного запаса форсирование двигателя и снижение кавитационного запаса приводит к снижению частоты колебаний.
Изменение режима работы двигателя по предлагаемому способу исключает возможность регулирования для управления полетом, однако возмущения, которые возникают при этом, компенсируются на участках полета с достаточным кавитационным запасам.
Рассмотрим пример реализации способа.
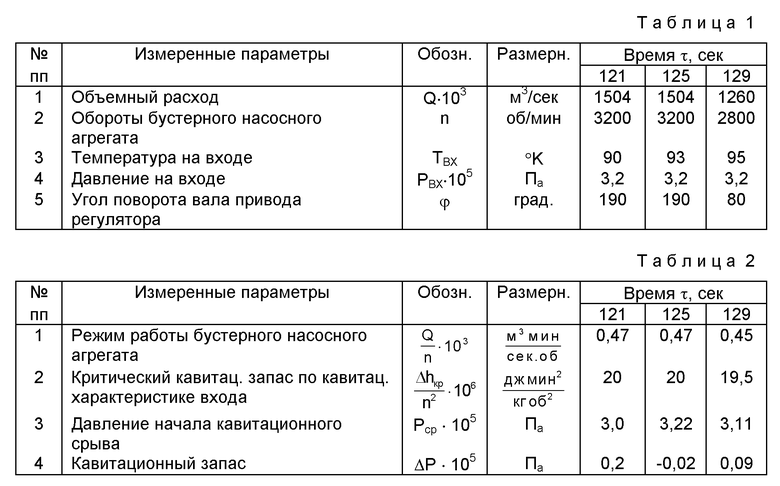
В процессе огневого стендового испытания зарегистрированные параметры двигателя по линии окислителя (жидкий кислород), приведены в табл. 1.
По измеренным параметрам в каждый момент времени определялось значение давления кавитационного срыва насоса с использованием кавитационной характеристики (Δhкр/n2) , полученной при модельных испытаниях насоса для режима работы (Q/n), зарегистрированного при испытании. Вычисленные параметры приведены в таблице 2.
По результатам измерений и вычислениям по ним фиксировалось значение кавитационного запаса давления, которое сравнивалось с допустимой величиной (для обеспечения работоспособности двигателя кавитационный запас должен быть положительным).
В процессе испытания (начиная с 121 сек.) вследствие отказа системы питания началось нерасчетное повышение температуры окислителя на входе в двигатель, которое привело к снижению кавитационного запаса к 125 сек. ниже допустимого. Дальнейшее повышение температуры, в случае отсутствия регулирования, привело бы к кавитационному срыву напора насоса и возгорания двигателя. Поэтому на 125 сек. была подана команда на дросселирование двигателя, по которой привод регулятора газогенератора двигателя обеспечил перекрытие площади регулирующего органа на перевод двигателя на режим ≈ 80% номинального. Это позволило снизить потребное давление на входе в двигатель, обеспечить необходимый кавитационный запас, работоспособность двигателя и выполнить программу испытания.
Реализация предлагаемого способа устройством осуществляется следующим образом (см. чертеж). В процессе полета ракеты осуществляется измерение параметров ЖРД 1 с помощью измерительного устройства 2. Измерительное устройство 2 обеспечивает измерение давлений и температур окислителя и горючего на входе в двигатель (Pовх, Pгвх, Tовх, Tгвх), оборотов вала ТНА (n). Измеренные параметры передаются в вычислительное устройство 3 для вычисления кавитационных запасов давления по линии окислителя и горючего (ΔPкав). В корректирующем устройстве 4 осуществляется сравнение полученных значений ΔPкав с допустимым значением ΔP
Источники информации
1. Б. Ф. Гликман. "Автоматическое регулирование жидкостных ракетных двигателей". М.: Машиностроение, 1989, с. 272.
2. "Основы теории автоматического управления ракетными двигательными установками". /А.И. Бабкин, С.В. Белов, Н.Б.Рутовский, Е.В.Соловьев/ М.: Машиностроение, 1985, с. 25.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ РЕЖИМА РАБОТЫ ЖИДКОСТНОЙ РАКЕТНОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКИ | 2000 |
|
RU2180705C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ РЕЖИМА РАБОТЫ ЖИДКОСТНОЙ РАКЕТНОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКИ | 2000 |
|
RU2180704C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ РЕЖИМА РАБОТЫ ЖИДКОСТНОЙ РАКЕТНОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКИ | 2010 |
|
RU2418188C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ РЕЖИМА РАБОТЫ ЖИДКОСТНОЙ РАКЕТНОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКИ | 2012 |
|
RU2499906C1 |
| СПОСОБ ЗАПУСКА КИСЛОРОДНО-УГЛЕВОДОРОДНОГО ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ С ДОЖИГАНИЕМ | 2001 |
|
RU2204733C2 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ | 2006 |
|
RU2315194C1 |
| СИСТЕМА ПОДАЧИ ЖИДКОГО КИСЛОРОДА И СПОСОБ ЕГО ПОДАЧИ ИЗ БАКА ПОТРЕБИТЕЛЮ | 2014 |
|
RU2547353C1 |
| СПОСОБ РАБОТЫ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ ЗАКРЫТОГО ЦИКЛА С ДОЖИГАНИЕМ ОКИСЛИТЕЛЬНОГО И ВОССТАНОВИТЕЛЬНОГО ГЕНЕРАТОРНЫХ ГАЗОВ БЕЗ ПОЛНОЙ ГАЗИФИКАЦИИ И ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ | 2022 |
|
RU2801019C1 |
| СПОСОБ ЭКСПЕРИМЕНТАЛЬНОГО ПОДТВЕРЖДЕНИЯ АМПЛИТУДНО-ФАЗОВЫХ ЧАСТОТНЫХ ХАРАКТЕРИСТИК ЖИДКОСТНЫХ РАКЕТНЫХ ДВИГАТЕЛЕЙ И ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ (ВАРИАНТЫ) | 2009 |
|
RU2406858C2 |
| УСТРОЙСТВО ДЛЯ РЕГЕНЕРАТИВНОГО ОХЛАЖДЕНИЯ СВЕРХЗВУКОВОЙ ЧАСТИ СОПЛА ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ | 2012 |
|
RU2514570C1 |
Изобретение относится к технической кибернетике и предназначено для регулирования режима работы жидкостного ракетного двигателя с помощью вычислительных устройств. Технический результат заключается в повышении энергетических характеристик за счет снижения величины давления в баках ракеты и в обеспечении работоспособности двигателя при неисправностях системы питания и термостатирования. Технический результат достигается за счет того, что после выхода двигателя на режим главной ступени тяги постоянно измеряют давления, температуры и расходы компонентов топлива на входе в двигатель и обороты вала турбонасосного агрегата. Определяют значение кавитационного запаса давления. Для каждого момента времени сравнивают полученное значение с допустимой величиной. При снижении величины кавитационного запаса ниже допустимой величины регулируют проходное сечение регулирующего органа, переводя двигатель на режим, при котором давление, соответствующее началу кавитационного срыва насоса, снижается, а кавитационный запас двигателя возрастает. Для повышения устойчивости двигателя к продольным и кавитационным колебаниям дополнительно анализируют частоту и амплитуду колебаний давления на входе в двигатель и в случае развития (увеличения амплитуды) колебаний изменения проходного сечения регулирующего органа ведут в сторону установления режима работы, обеспечивающего затухание автоколебаний. 1 з.п.ф-лы, 1 ил., 2 табл.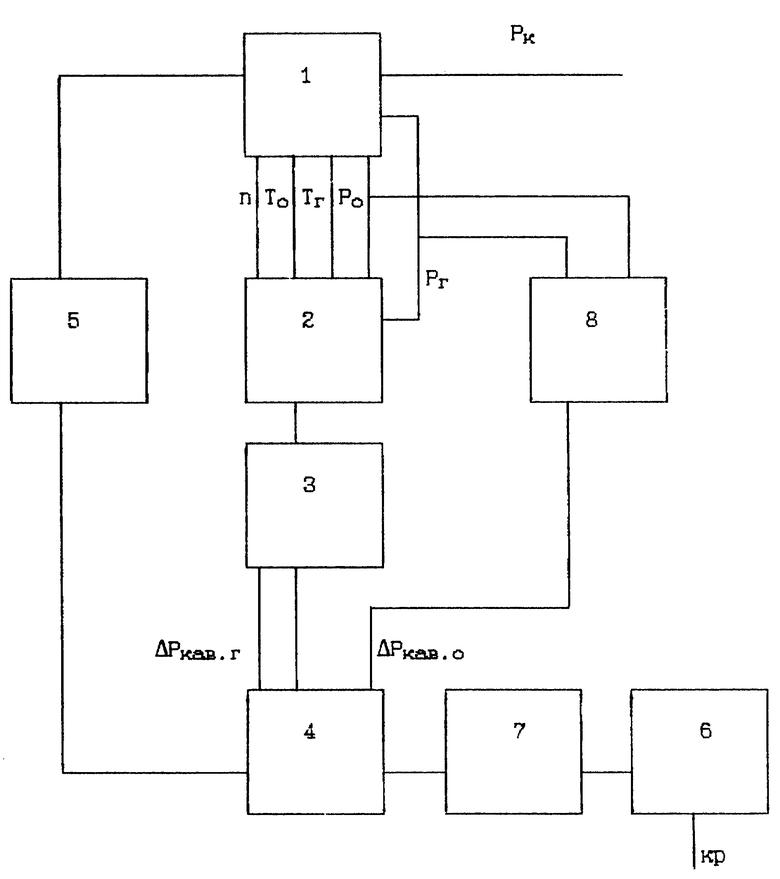
| Бабкин А.И., Белов С.В | |||
| и др | |||
| Основы теории автоматического управления ракетными двигательными установками | |||
| - М.: Машиностроение, 1986, с.25. |

