Изобретение относится к автомобильному приборостроению, в частности к устройствам для измерения безопасной дистанции между транспортными средствами, и может быть использовано на любом наземном транспортном средстве с целью обеспечения безопасности движения.
Устройства для контроля безопасной дистанции между транспортными средствами известны. Например, известно устройство для контроля интервала между автомобилями в потоке, которое содержит индуктивный детектор, дифференцирующее звено, две цепи выдержки времени, решающий блок в виде двух схем совпадения и сигнализатор [1]. Устройство определяет интервал между транспортными средствами на основе отсчета времени между моментами прохождения транспортными средствами, следующими друг за другом, над петлей индуктивного детектора, размещенного под полотном дороги. С целью устранения влияния скорости движения транспортных средств на ошибки определения безопасного расстояния в устройстве для контроля безопасной дистанции между транспортными средствами [2] , содержащем индуктивный контур, размещенный под полотном дороги и соединенный с входом детектора решающий блок, вход которого соединен с входом сигнализатора, введены формирователь импульсов, управляемые генераторы, логический блок, счетчики, вход формирователя импульсов соединен с входом детектора, первый выход формирователя импульсов соединен через первый управляемый генератор с первым входом логического блока, второй выход формирователя импульсов через второй управляемый генератор соединен со вторым входом логического блока и входом первого счетчика, вход которого соединен с первым входом решающего блока, вход логического блока через второй счетчик соединен со вторым входом решающего блока.
Устройство для контроля безопасной дистанции между транспортными средствами [2] является наиболее близким по технической сущности к заявляемому и может быть выбрано в качестве прототипа. Общими недостатками известных устройств являются, во-первых, возможность работы устройства только при наличии индуктивной петли под полотном дороги; во-вторых, необходимость постоянной связи между автомобилем и индуктивной петлей; в-третьих, точность работы устройства ухудшается в случае разгона или торможения одного из транспортных средств, расстояние между которыми контролируется, за пределами индуктивной петли.
Цель данного изобретения состоит в обеспечении возможности измерения безопасной дистанции между транспортными средствами на любом участке дороги, а также повышении точности измерения этой дистанции в условиях плохой видимости.
Поставленная цель достигается тем, что в устройстве, расположенном на автомобиле, введены два объектива, оптические оси которых ориентированы по направлению движения автомобиля. В задней плоскости каждого объектива расположен детектор, выполненный в виде светочувствительного линейного прибора с зарядовой связью. Выходы детекторов через соответствующие формирователи импульсов, счетчики и регистры памяти подключены к решающему блоку. К соответствующим входам регистров памяти подключен делитель частоты. Сигнал на выходе каждого формирователя импульсов появляется только в случае наличия в поле зрения объективов транспортного средства. При появлении сигнала соответствующий счетчик определяет порядковый номер ячейки линейного прибора с зарядовой связью, зарегистрировавшей этот сигнал. Каждому номеру поставлено в соответствие значение угла между направлением прихода излучения и линейным прибором с зарядовой связью Решающий блок по известному базовому расстоянию и полученным номерам светочувствительных ячеек линейного прибора с зарядовой связью определяет искомую дистанцию между транспортными средствами.
Устройство содержит объективы 1 и 2, предназначенные для фокусировки излучения фар впереди идущего автомобиля, оптические оси которых ориентированы параллельно направлению движения автомобиля-носителя аппаратуры и разнесены на базовое расстояние L. В задней фокальной плоскости каждого из объективов 1 и 2 расположен линейный прибор с зарядовой связью 3 и 4 соответственно. Линейные приборы с зарядовой связью 3 и 4 расположены на одной линии. Каждый линейный прибор с зарядовой связью 3 и 4 состоит из n числа светочувствительных ячеек, ориентированных вдоль одной линии. К управляющему входу линейного прибора с зарядовой связью 3 и 4 подключен генератор 5, предназначенный для считывания информации с линейного прибора с зарядовой связью 3, 4 и для синхронизации устройства в целом. Выход каждого линейного прибора с зарядовой связью 3 и 4 через соответствующий формирователь сигналов 6 и 7 подключен к информационному входу соответствующего счетчика 8 и 9. Счетный вход каждого счетчика 8 и 9 подключен к выходу генератора 5. Выход каждого счетчика 8 и 9 соединен с информационным входом соответствующего регистра памяти 10 и 11. Управляющий вход каждого регистра памяти 10 и 11 подключен через делитель частоты 12 к выходу генератора 5. Выход каждого регистра памяти 10 и 11 подключен к отдельному входу решающего блока 13, выходом соединенного с входом сигнализатора 14. Сигнализатор 14 выполняет функцию связующего звена между устройством и водителем и может быть выполнен, например, в виде светового табло.
Излучение задних источников излучения автомобиля (габаритных огней, стоп-сигналов), расположенных впереди автомобиля-носителя аппаратуры, с помощью объективов 1, 2 проецируется на соответствующий линейный прибор с зарядовой связью 3, 4. Считывание информации производится путем подачи на линейный прибор с зарядовой связью 3, 4 сдвиговых импульсов с генератора 5. С момента начала считывания информации с линейного прибора с зарядовой связью 3, 4 соответствующий счетчик 8, 9 начинает отсчет числа импульсов, сформированных генератором 5, до подачи управляющего сигнала. Изображение автомобиля состоит из двух составляющих: во-первых, изображения заднего вида автомобиля, сформированного за счет внешних источников света, во-вторых, изображения собственных источников (габаритные огни, стоп-сигналы). При этом в темное время суток или в тумане яркость первых источников намного меньше вторых. Этим обуславливается форма зафиксированного на линейном приборе с зарядовой связью 3, 4 сигнала. Максимумы полученного сигнала соответствуют излучению собственных источников впереди идущего автомобиля. С линейного прибора с зарядовой связью 3, 4 информация поступает на соответствующий формирователь сигналов 6, 7, который формирует управляющий сигнал, определяемый превышением интенсивности сигнала над пороговым значением, и подает его на соответствующий счетчик 8, 9, вследствие чего отсчет импульсов прекращается. Количество импульсов, сформированных генератором 5 до отключения счетчика 8, 9, соответствует номеру светочувствительной ячейки i, j соответствующего линейного прибора с зарядовой связью 3, 4, зарегистрировавшей перепад интенсивности излучения. Для определения дистанции используется излучение правого габаритного огня впереди идущего автомобиля, для чего информация с линейного прибора с зарядовой связью 3, 4 считывается начиная с крайней левой относительно оптической оси объектива 1, 2 светочувствительной ячейки. Использование правого габаритного огня обусловлено тем, что это позволяет исключить случайное определение дистанции до встречного автомобиля по свету фар, как это могло быть в случае использования для определения расстояния излучения левого габаритного огня. Информация со счетчика 8, 9 поступает в соответствующий регистр памяти 10, 11, где она хранится до подачи управляющего сигнала с делителя частоты 12. Делитель частоты 12 начинает отсчет одновременно со счетчиками 8, 9 и подает управляющий сигнал на регистр памяти 10, 11 после отсчета числа импульсов генератора 5, соответствующих количеству светочувствительных ячеек в линейном приборе с зарядовой связью 3, 4. После этого информация с регистра памяти 10, 11 подается на отдельные информационные входы решающего блока 13, где осуществляется расчет дистанции до впереди идущего автомобиля. Вычисления производятся по известному базовому расстоянию L между оптическими осями объективов 1, 2 и значениям α1(i), α2(j) углов между направлением прихода излучения и линейным прибором с зарядовой связью 3, 4. Значение угла α1(i) мы получаем за счет того, что каждой светочувствительной ячейке с номером i линейного прибора с зарядовой связью 3 соответствует значение угла падения светового пучка от правого габаритного огня впереди идущего автомобиля на заднюю фокальную плоскость объектива 1. Аналогично светочувствительной ячейке с номером j линейного прибора с зарядовой связью 4 соответствует значение угла падения светового пучка на заднюю фокальную плоскость объектива 2, что позволяет определить угол α2(j). В итоге решающий блок 13 производит расчет дистанции до впереди идущего автомобиля по номерам i, j светочувствительных ячеек линейного прибора с зарядовой связью 3, 4 и фиксированному базовому расстоянию L. При изменении положения впереди идущего автомобиля относительно автомобиля-носителя аппаратуры значение базового расстояния L остается неизменным, значение углов α1(i), α2(j) и соответственно номеров ячеек i, j меняется. Вследствие этого меняется результат расчета решающего блока 13. Полученный результат вычисления с решающего блока 13 подается на сигнализатор 14, который выполняет функцию связующего звена между устройством и водителем автомобиля-носителя аппаратуры и выводит полученное значение дистанции на панель приборов.
Источники информации
1. Устройство для контроля безопасной дистанции между транспортными средствами. Авторское свидетельство СССР 1244696, кл. G 08 G 1/09, 1986 г.
2. Устройство для контроля безопасной дистанции между транспортными средствами. Авторское свидетельство СССР 613360, кл. G 08 G 1/09, 1978 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬ СКОРОСТИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2170437C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ТИПА ТРАНСПОРТНОГО СРЕДСТВА | 1999 |
|
RU2159961C1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ДЕЙСТВИЙ И СОСТОЯНИЯ НАБЛЮДАЕМОГО ЧЕЛОВЕКА | 2000 |
|
RU2197309C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДЕЙСТВИЙ СПОРТСМЕНА НА ДИСТАНЦИИ | 2000 |
|
RU2181611C2 |
| ДЕТЕКТОР ПРЕПЯТСТВИЙ ДЛЯ ЛЮДЕЙ С ОСЛАБЛЕННЫМ ЗРЕНИЕМ | 2001 |
|
RU2212871C2 |
| ИНФРАКРАСНЫЙ ЛОКАТОР ДЛЯ ЛЮДЕЙ С ОСЛАБЛЕННЫМ ЗРЕНИЕМ | 2000 |
|
RU2185640C2 |
| АНАЛИЗАТОР СПЕКТРА ПО ФУНКЦИЯМ УОЛША | 1999 |
|
RU2160926C1 |
| ВЫСОТОМЕР ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2253880C1 |
| УСТРОЙСТВО ДЛЯ УСПОКОЕНИЯ КОЛЕБАНИЙ УПРУГОГО ЭЛЕМЕНТА ПЕРЕМЕННОЙ ЖЕСТКОСТИ | 2001 |
|
RU2192662C1 |
| АЭРОФОТОАППАРАТ | 2000 |
|
RU2180449C2 |
Устройство для контроля безопасной дистанции между транспортными средствами содержит последовательно соединенные детектор и формирователь импульсов, генератор, два счетчика, решающий блок, выход, соединенный с входом сигнализатора, два объектива, второй детектор, делитель частоты, два регистра памяти, второй формирователь импульсов, причем каждый детектор выполнен в виде линейного прибора с зарядовой связью, состоящего из n числа светочувствительных ячеек, ориентированных вдоль одной линии, и размещен в задней фокальной плоскости соответственно объектива, оптические оси которых разнесены на базовое расстояние L и ориентированы параллельно направлению движения автомобиля-носителя аппаратуры, а выход каждого линейного прибора с зарядовой связью через соответствующий формирователь импульсов подключен к входу управления счетом соответствующего счетчика, выходом соединенного с соответствующим входом решающего блока через соответствующий регистр памяти, информационный вход каждого из которых через делитель частоты подключен к выходу генератора параллельно с управляющим входом каждого линейного прибора с зарядовой связью и информационным входом каждого счетчика, при этом генератор выполнен в виде генератора сдвиговых импульсов, а решающий блок выполнен в виде блока вычисления дистанции на основе данных о направлении прихода фиксируемого излучения. Технический результат заключается в обеспечении возможности измерения на любом участке дороги, повышения точности измерения в условиях плохой видимости. 1 ил.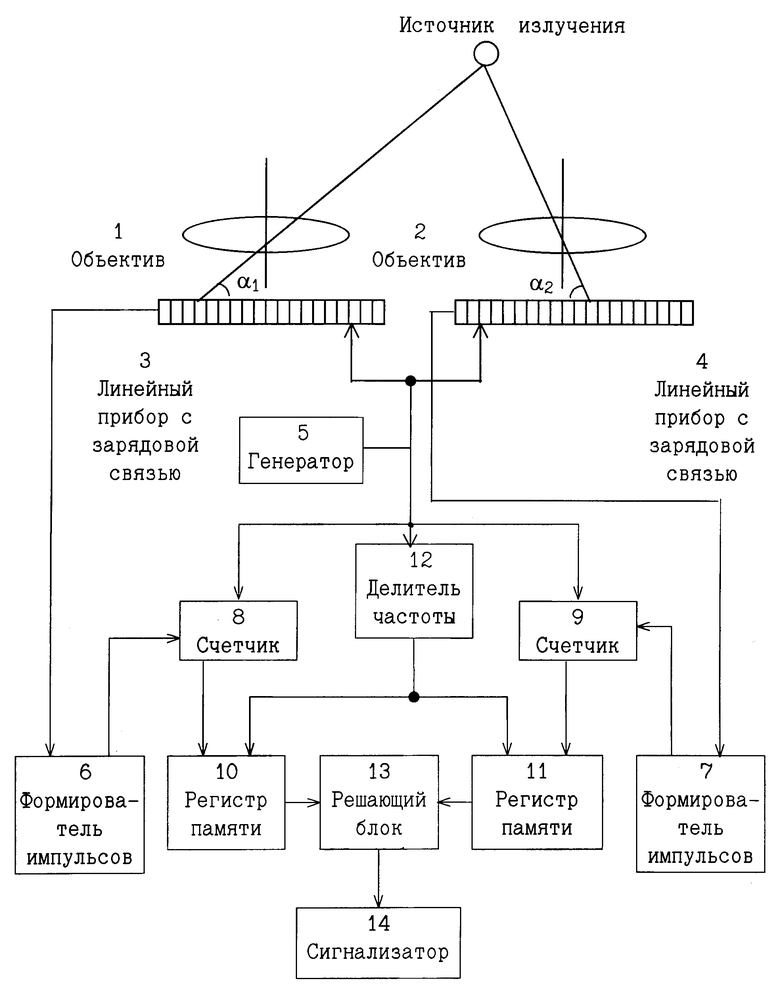
Устройство для контроля безопасной дистанции между транспортными средствами, содержащее последовательно соединенные детектор и формирователь импульсов, генератор, два счетчика, решающий блок, выходом соединенный с входом сигнализатора, отличающееся тем, что дополнительно введены два объектива, второй детектор, делитель частоты, два регистра памяти и второй формирователь импульсов, причем каждый детектор выполнен в виде линейного прибора с зарядовой связью, состоящего из n числа светочувствительных ячеек, ориентированных вдоль одной линии, и размещен в задней фокальной плоскости соответственно объектива, оптические оси которых разнесены на базовое расстояние L и ориентированы параллельно направлению движения автомобиля-носителя аппаратуры, а выход каждого линейного прибора с зарядовой связью через соответствующий формирователь импульсов подключен к входу управления счетом соответствующего счетчика, выходом соединенного с соответствующим входом решающего блока через соответствующий регистр памяти, информационный вход каждого из которых через делитель частоты подключен к выходу генератора параллельно с управляющим входом каждого линейного прибора с зарядовой связью и информационным входом каждого счетчика, при этом генератор выполнен в виде генератора сдвиговых импульсов, а решающий блок выполнен в виде блока вычисления дистанции на основе данных о направлении прихода фиксируемого излучения.
| В.М.КОМАРОВ и др | |||
| Технические средства обеспечения безопасности дорожного движения | |||
| - М., Транспорт, 1990, с.322 - 328 | |||
| Устройство для контроля безопасной дистанции между транспортными средствами | 1984 |
|
SU1244696A1 |
| Устройство для контроля безопасной дистанции между транспортными средствами | 1977 |
|
SU613360A1 |
| US 3859660, 17.01.1975 | |||
| US 4121210, 17.10.1978. | |||
