Изобретение относится к космической технике, в частности к реактивной системе управления (РСУ) движением центрам масс космического аппарата (КА) и движением КА относительно его центра масс, может найти применение в системах управления движением (стабилизации, ориентации, маневра, обеспечения условий микрогравитации и др.) космических аппаратов в пространстве.
Известны схемы РСУ, использующие для управления движением центра масс КА электроракетные двигатели (например, электротермические, плазменные или ионные ЭРД), а для управления движением КА относительное его центра масс - поворот этих ЭРД в кардановом подвесе, рассогласование тяги отдельных блоков ЭРД, вспомогательную двигательную установку (например, на горячем газе), а также их комбинации [1].
Недостатками таких РСУ в ряде случаев являются ограниченность располагаемого управляющего момента (например, для заданной компоновочной схемы КА и принципов управления угловым движением) и существенные дополнительные затраты массы рабочего тела или электрической энергии для обеспечения значительных управляющих моментов.
В качестве прототипа выбрана реактивная система управления движением геостационарных КА, включающая в себя корректирующие орбиту ЭРД (например, ионные) и пневматические ракетные двигатели на холодном газе для вспомогательной двигательной установки ориентации и стабилизации (ДОС), управляющей движением КА относительно его центра масс [2]. Эта система управляет движением КА относительно его центра масс посредством выдачи через обратную связь соответствующих команд на включение/отключение расхода холодного газа в пневматические ракетные двигатели ДОС и с помощью корректирующих ЭРД изменяет орбиту КА.
Однако применение в известной РСУ пневматических двигателей без подогрева рабочего тела для ДОС приводит к увеличению расхода дополнительной массы в РСУ, поскольку удельный импульс ДОС (350 Н•с/кг на ксеноне, например) на два порядка ниже, чем удельный импульс самих ионных ЭРД (35000 Н•с/кг, соответственно), и тем самым в целом снижает эффективность РСУ с маршевыми или корректирующими ЭРД.
Этот недостаток проявляется тем в большей степени, чем выше удельный импульс маршевых ЭРД.
При создании изобретения решались задачи повышения эффективности РСУ и использования энергетических возможностей КА для экономии рабочего тела и увеличения срока активного существования КА.
Поставленные задачи решены за счет того, что в известной реактивной системе управления движением космического аппарата, включающей маршевые или корректирующие электроракетные двигатели и ракетные двигатели ориентации и стабилизации, соединенные обратной связью с блоком управления, согласно изобретению в качестве двигателей ориентации и стабилизации используют термические ракетные двигатели, снабженные аккумулятором тепла, а в систему управления дополнительно введен блок регулирования температуры, подключенный к блоку управления и аккумуляторам тепла термических ракетных двигателей.
Дополнительно термические ракетные двигатели могут быть вынесены за пределы корпуса космического аппарата на расстояние до 2...5 его диаметров.
Дополнительно термические ракетные двигатели могут быть сгруппированы в блоки, причем аккумуляторы тепла сгруппированы в единый блок, подключенный к блоку регулирования температуры.
Дополнительно термические ракетные двигатели могут быть объединены по рабочему телу с маршевыми или корректирующими электроракетными двигателями.
Применение в качестве ракетных двигателей ориентации и стабилизации термических ракетных двигателей, снабженных аккумулятором тепла и блоком регулирования его температуры, позволяет повысить эффективность использования энергетических возможностей КА для экономии рабочего тела, увеличить срок его активного существования и надежность РСУ. Вынесение термических ракетных двигателей, снабженных аккумулятором тепла, за пределы корпуса КА, например, на 5 его диаметров, увеличит эффективный удельный импульс РСУ в 7. . . 7,5 раз по сравнению с эффективным удельным импульсом известной РСУ. Объединение указанных двигателей ориентации и стабилизации в блоки, сгруппировывание их аккумуляторов тепла в единый блок, подключенный к блоку регулирования температуры, увеличит эффективность использования каждого термического двигателя ДОС пропорционально массе общего для всех двигателей блока аккумулятора тепла. Объединение термических ракетных двигателей по рабочему телу с маршевыми или корректирующими электроракетными двигателями позволит увеличить суммарную эффективность РСУ за счет полного использования рабочего тела и уменьшения массы арматуры системы хранения и подачи рабочего тела.
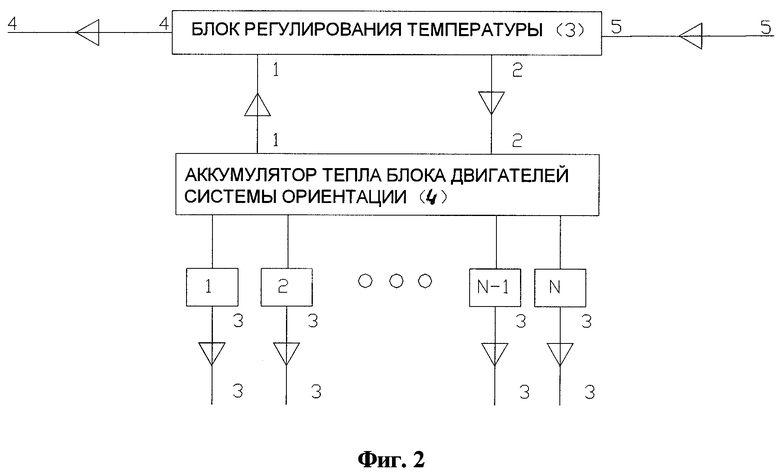
На фиг. 1 приведен пример реализации предлагаемой реактивной системы управления движением космического аппарата. РСУ содержит блок управления 1, ДОС (электротермические ракетные двигатели 2, снабженные аккумулятором тепла 4), блок регулирования температуры 3, маршевые электроракетные двигатели (например, ионные или стационарные плазменные ЭРД) 5, систему хранения и подачи рабочего тела 6, соединенные линиями обратных связей 1-1, 2-2, 3-3, 4-4, 5-5, 6-6, 7-7. В РСУ объединены по рабочему телу маршевые ЭРД 5 и электротермические ракетные двигатели ориентации и стабилизации 2.
На фиг. 2 приведен пример реализации предлагаемой РСУ с сгруппированными в единый блок аккумуляторами тепла термических ракетных двигателей.
Предлагаемая РСУ работает следующим образом.
Бортовая цифровая электронно-вычислительная машина (БЦВМ) (на схеме не показана) блока управления 1 анализирует данные о положении КА на орбите и сопоставляет их с требуемым положением КА, по линиям связи 1-1, 3-3, 4-4, 6-6 снимает тепловые характеристики аккумулятора тепла 3, ДОС 2 и состояние маршевого двигателя 5, определяет по известным методам значение управляющих импульсов для РСУ КА, рассчитывает оптимальную циклограмму работы ДОС, формирует и по линиям обратной связи 5-5, 2-2 и 7-7 подает команды управления блоку регулирования температуры 3 на подачу тепловой мощности к аккумулятору тепла 4 и маршевому двигателю 5, производит их первичную обработку и, после получения ответного сигнала о исполнении предыдущих команд, подает по линии обратной связи 5-5 команду в блок регулирования температуры 3 для перевода аккумуляторов тепла 4 двигателей ориентации и стабилизации 2 и/или, по линии обратной связи 7-7, маршевых двигателей 5 в режим выдачи управляющих воздействий. После получения по линиям связи 3-3 и 6-6 ответного сигнала о состоянии двигателей 2 и 5 в блоке управления 1 формируется и по линии обратной связи 8-8 выдается набор команд оптимальной подачи рабочего тела из объединенной системы хранения и подачи рабочего тела 6 в двигатель системы ориентации 2 через аккумулятор тепла 4, а по линии связи 1-1 производится контроль теплового состояния аккумулятора тепла 4. Рабочее тело, истекая через двигатели 2 и/или 5, создает требуемые управляющие воздействия, изменяющие положение КА на орбите.
Порядок работы РСУ в случае группировки аккумуляторов тепла в единый блок аналогичен приведенному выше, при этом управление расходом рабочего тела в двигатели 1...N системы ориентации в блоке управления по линиям 3-3 осуществляется независимо друг от друга, а управление температурой общих блока регулирования температуры 4 и аккумулятора тепла 3 блока двигателей системы ориентации осуществляется по линиям обратной связи 1-1, 4-4, 5-5.
Список источников
1. Гришин С.Д., Захаров Ю.А., Оделевский В.К. Проектирование космических аппаратов с двигателями малой тяги. - М.: Машиностроение, 1990.
2. Smith P., Horton M.A. Advanced propulsion systems for geostatoinary spacecraftstudy results. AJAA paper, 1984, N 84-1230.
Изобретение относится к космической технике, в частности к реактивным средствам управления ориентацией и движением центра масс космических аппаратов. Согласно изобретению система включает в себя маршевые или корректирующие электроракетные двигатели и термические ракетные двигатели ориентации и стабилизации. Последние (например, в виде единого блока) снабжены аккумулятором тепла, а в систему управления дополнительно введен блок регулирования температуры. Эти двигатели могут выноситься на расстояние до 2-5 диаметров корпуса аппарата. Термические двигатели могут быть объединены по рабочему телу с маршевыми или корректирующими двигателями. Изобретение направлено на достижение экономии рабочего тела и увеличение срока активного существования космического аппарата. 3 з.п.ф-лы, 2 ил.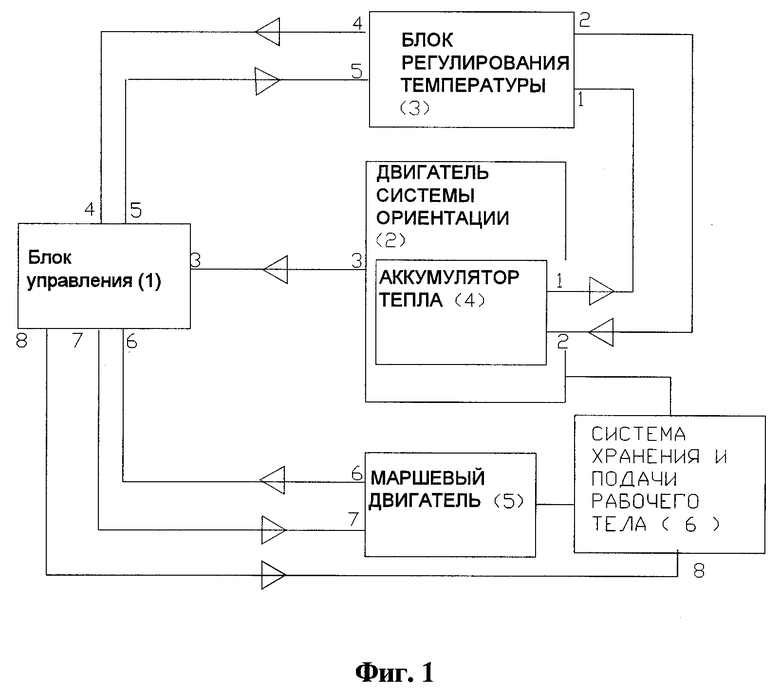
| SMITH P., HORTON M.A | |||
| Advanced Propulsion Systems for Geostationary Spacecraft-Study Results | |||
| AIAA Paper | |||
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
| ГРИШИН С.Д., ЗАХАРОВ Ю.А., ОДЕЛЕВСКИЙ В.К | |||
| Проектирование космических аппаратов с двигателями малой тяги | |||
| - М.: Машиностроение, 1990 | |||
| СПОСОБ ПОВЫШЕНИЯ СЕЙСМОСТОЙКОСТИ КРУПНОПАНЕЛЬНЫХ ЖИЛЫХ ДОМОВ БЕЗ ПРИСТЕННЫХ КОЛОНН | 2017 |
|
RU2664562C1 |
| GB 1591902 A, 01.07.1981. | |||
