Изобретение относится к ракетно-космической технике, а именно к способам выведения космического аппарата (КА) на траектории полета к небесным телам.
Прямые полеты к удаленным небесным телам при разгоне с околоземной орбиты требуют больших скоростей отлета, весьма значительных затрат массы аппарата и отличаются большой длительностью их достижения, сравнимой с продолжительностью жизни человека. Эти обстоятельства заставляют искать иные пути их осуществления. Одним из таких путей является использование гравитационных полей планет, в частности, непосредственно поля тяготения Земли.
Существующие аналоги способа выведения на межпланетную траекторию полета для организации пролета Земли предполагают использование дополнительных гравитационных маневров в полях тяготения планет посредников [1, стр.405, рис.151]. Так США при осуществлении проектов "Галилей" и "Кассини" для организации гравманевра в поле тяготения Земли использовали гравитационное воздействие на траекторию полета КА планеты Венера. Недостатки этого способа также связаны с большой продолжительностью его осуществления (полет от Земли до Земли продолжается примерно два года), реализация этого способа возможна не каждый год, так требует определенного взаимного расположения трех небесных тел Солнечной системы: Земли, Венеры и небесного тела цели полета, а также трудности, связанные управлением многократного пролета аппаратом небесных тел.
Наиболее близким к предлагаемому способу выведения является способ выведения КА на межпланетную траекторию полета [1, стр.406 - прототип, рис.152], включающий его вывод на гелиоцентрическую траекторию, возврат к Земле с приращением скорости и разгон полем тяготения Земли. Этот способ предполагает вывод аппарата на гелиоцентрическую орбиту с апогелием, расположенным за орбитой планеты Марс, где осуществляют его торможение для организации встречи с Землей и получения приращения скорости аппарата при ее пролете.
Недостаток этого способа заключается в большой продолжительности осуществления полета КА от Земли до Земли, примерно 2-3 года, что напрямую увеличивает время полета до цели.
Целью изобретения является сокращение времени организации гравманевра в поле тяготения Земли при выводе космического аппарата на межпланетную траекторию полета к цели.
Цель изобретения достигается тем, что способ выведения космического аппарата на межпланетную траекторию полета, включающий его вывод на гелиоцентрическую траекторию с удалением аппарата от Солнца и последующим его приближением к Солнцу, возврат к Земле с приращением скорости и увеличение гелиоцентрической скорости космического аппарата в результате гравитационного маневра у Земли, что после пересечения космическим аппаратом орбиты Земли на участке его приближения к Солнцу и до входа аппарата в грависферу Земли осуществляют разгон аппарата с помощью маршевых реактивных двигателей, обеспечивая равенство угловых движений Земли и космического аппарата относительно Солнца на момент пролета Земли.
Сущность предлагаемого способа иллюстрируется фиг.1, на которой показан гелиоцентрический участок траектории полета Земля-Земля.
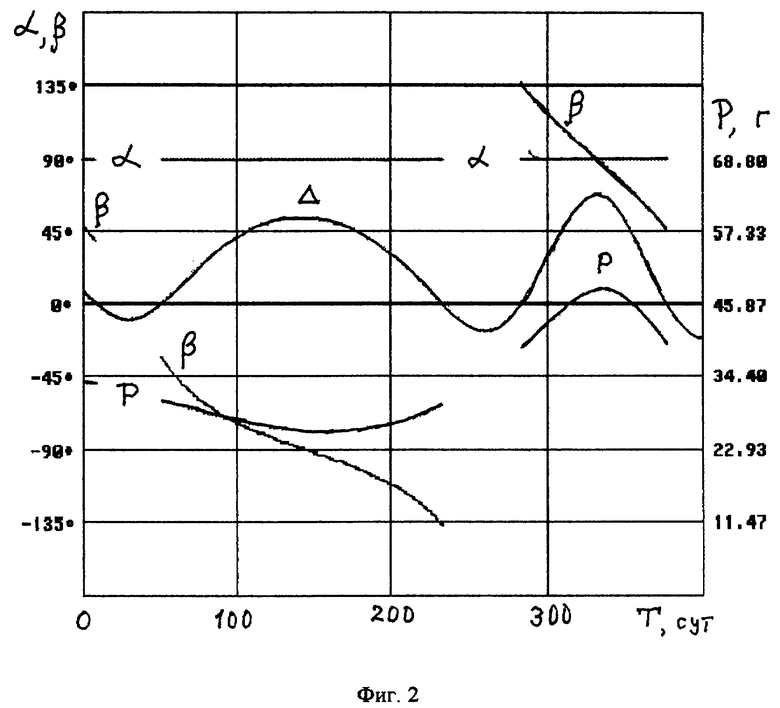
На фиг.2 для данной траектории представлен закон управления вектором реактивной тяги на участке полета Земля-Земля.
Перед осуществлением выведения аппарата на траекторию полета к небесному телу для конкретного состава и заданных значений проектных параметров КА определяют программу его полета, обеспечивающую равенство угловых движений Земли и аппарата на момент ее пролета; определяют дату старта; высоту и скорость пролета Земли; момент прилета к цели; времена воздействия на КА реактивной силы и ее ориентацию в пространстве. На момент пролета Земли угловые дальности космического аппарата и Земли могут отличаться только на целое число оборотов относительно Солнца. В данном случае рассматриваются траектории с одинаковым числом оборотов КА и Земли относительно Солнца. Для этого решают задачу оптимизации по нахождению закона управления вектором реактивной тяги маршевых двигателей, удовлетворяющего требуемым условиям. Математический аппарат, используемый для определения закона управления вектором реактивной тяги, параметров схемы полета и алгоритмы вычислений приведены в работах [2, 3].
Рассмотрим последовательность операций предлагаемого способа выведения на межпланетную траекторию. Сначала КА с поверхности Земли выводят на околоземную орбиту. Далее на аппарат воздействуют реактивной силой, сообщают ему импульс скорости и выводят на гелиоцентричекую траекторию полета. В процессе полета в поле тяготения Солнца в соответствии с заданным законом управления на КА воздействуют реактивной силой, формируют траекторию его возврата в грависферу Земли с приращением скорости. Во время полета в сфере действия Земли на аппарат воздействует гравитационное поле Земли, за счет чего происходит увеличение гелиоцентрической скорости КА и формируется межпланетная траектория полета к цели.
Рассмотрим возможное устройство ракетно-космического блока для реализации этого способа выведения. Он может включать КА, снабженный для полета необходимыми системами, в том числе двигательной установкой на химическом топливе или двигательной установкой с электроракетным двигателем, разгонный блок, многоступенчатый ракетоноситель.
Приведем конкретный пример выведения КА на траекторию полета к планете Юпитер и некоторые его характеризующие цифры. С помощью ракетоносителя на околоземную орбиту выводится начальная масса 8120 кг, состоящая из химического разгонного блока (РБ) и КА с солнечной электроракетной двигательной установкой (величина удельная тяга 1800 с, величина номинальной реактивной тяги 34.4 г). РБ стартует 30.07.2011 года с околоземной орбиты и осуществляет вывод космического аппарата из гравитационного поля Земли на гелиоцентрическую траекторию полета со скоростью отлета от Земли ≈1.74 км/с и отделяется. После отделения РБ масса аппарата равна ≈2230 кг. В данном случае гелиоцентрическая траектория полета длительностью 400 суток (см. фиг.1) состоит из трех активных и трех пассивных участков. Ось х указывает направление на точку весеннего равноденствия. Орбита Земли изображена тонкой линией, активные участки представлены жирными линиями, пассивные - точками. Символом α показан апогелий земной орбиты. Радиусами отмечены положения КА на момент старта с околоземной орбиты Тс и на момент его входа в грависферу Земли Тз, совпадающие с положениями Земли на своей орбите в соответствующие моменты.
На гелиоцентрическом участке полета управление движением осуществляют с помощью маршевых двигателей в соответствии с заданным законом управления вектором реактивной тяги (см. фиг.2) и формируют траекторию возврата КА в грависферу Земли с заданным приращением скорости, для данной траектории представлен закон управления вектором реактивной тяги, и введены обозначения: Р - величина реактивной тяги; α - угол между вектором тяги и нормалью к мгновенной плоскости траектории полета; β - угол между проекцией вектора тяги на мгновенную плоскость траектории полета аппарата и радиус-вектором Солнце-КА; Δ - функция включения-выключения двигателя (если Δ>0, то двигатель включен; если Δ<0, то двигатель выключен).
Вначале гелиоцентрического участка продолжается разгон КА, затем следует участок пассивного полета, а далее тормозной участок полета. На этом участке аппарат продолжает удаляться от Солнца, но, постепенно теряя скорость, начинает приближаться к Солнцу и после выключения двигателя пересекает орбиту Земли.
Затем двигатели снова включаются на разгон, аппарат постепенно начинает приближаться к Земле и входит в ее грависферу, осуществляя пролет над поверхностью Земли на высоте 800 км со скоростью 9.1 км/с. На этот момент времени масса аппарата составляет примерно ≈1800 кг. В результате гравманевра в поле тяготения Земли величина гелиоцентрической скорости аппарата увеличивается на 5.57 км/с. Спустя 1020 суток после гравитационного маневра в поле тяготения Земли КА входит в грависферу Юпитера. Время полета, начиная со старта с околоземной орбиты до входа в грависферу Юпитера, примерно равно 1420 суток, а масса аппарата на входе в грависферу Юпитера составляет ≈1580 кг. Использование в составе аппарата солнечных электроракетных двигателей позволяет использовать их и на участке полета Земля-Юпитер.
Предлагаемый способ выведения КА на межпланетную траекторию при полете к Юпитеру позволяет на два года сократить время достижения Юпитера по сравнению со способом, реализованным США в проекте "Галилей" (старт 18 октября 1989 г., встреча с Юпитером 7 декабря 1995 г.). В данном проекте для вывода КА на траекторию полета к Юпитеру был осуществлен один маневр в поле тяготения Венеры и два маневра в поле тяготения Земли. Сравнивать массовые характеристики обоих способов выведения аппарата на межпланетную траекторию здесь не совсем корректно, так использовались разные разгонные блоки и космические аппараты разного состава. Однако заметим, что массы аппаратов на входе в грависферу Юпитера отличны всего на 860 кг, хотя в проекте "Галилей" с околоземной орбиты стартовал аппарат с начальной массой более 17 тонн.
Использование маршевых двигателей для организации гравманевра у Земли значительно расширяет возможности по обеспечению необходимого приращения скорости пролета Земли при заданном времени ее пролета. Применение в качестве маршевых - двигателей, обладающих большим удельным импульсом, - электроракетных двигателей, позволяет значительно сократить расход массы аппарата, а небольшое удаление КА от земной орбиты весьма благоприятно для использования в качестве источника их питания солнечной энергии. Важным достоинством является ежегодная повторяемость данной схемы полета, а возможность регулирования времени возврата аппарата к Земле и скорости ее пролета позволяет значительно расширить окна старта КА с околоземной орбиты.
Технический результат - повышение эффективности полетов к удаленным небесным телам. Характеризуется следующими моментами: сокращение времени полета до цели, увеличение транспортных возможностей КА, возможностью ежегодной реализации предлагаемой схемы полета, удешевлением и упрощением организационно-технического обеспечения полетов к удаленным небесным телам наземными средствами управления и универсальностью последовательности действий при полете к конкретному небесному телу.
ЛИТЕРАТУРА
1. В.И.Левантовский. "Механика космического полета в элементарном изложении", 3-е издание, дополненное и переработанное. - М.: Наука, 1980, 512 с.
2. Федотов Г.Г. Оптимизация перелетов между орбитами искусственных спутников двух планет при использовании комбинации большой и малой тяги. Космические исследования, 2002, том 40, №6, с.616-625.
3. Федотов Г.Г. Оптимизация траекторий полета КА с ЭРД при использовании гравитационного маневра. Космические исследования, 2004, том 42, №4, с.404-413.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УДАРНОГО ВОЗДЕЙСТВИЯ НА ОПАСНЫЕ КОСМИЧЕСКИЕ ОБЪЕКТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2504503C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО ОБЪЕКТА ПРИ ПЕРЕЛЁТЕ С ОРБИТЫ ЗЕМЛИ НА ОРБИТУ ЛУНЫ | 2018 |
|
RU2709951C1 |
| СПОСОБ УСКОРЕНИЯ ДВИЖЕНИЯ КОСМИЧЕСКИХ АППАРАТОВ | 2001 |
|
RU2250860C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНОЙ КОСМИЧЕСКОЙ СИСТЕМОЙ | 2015 |
|
RU2605463C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНОЙ КОСМИЧЕСКОЙ СИСТЕМОЙ | 2015 |
|
RU2614466C2 |
| СПОСОБ ВЫВЕДЕНИЯ КОСМИЧЕСКОГО АППАРАТА В КОЛЛИНЕАРНЫЕ ТОЧКИ ЛИБРАЦИИ СИСТЕМЫ СОЛНЦЕ - ЗЕМЛЯ | 1989 |
|
SU1840856A1 |
| МНОГОРАЗОВАЯ КОСМИЧЕСКАЯ ТРАНСПОРТНАЯ СИСТЕМА ДЛЯ МАССОВОЙ ДОСТАВКИ С ОКОЛОЗЕМНОЙ ОРБИТЫ НА ОКОЛОЛУННУЮ ОРБИТУ ТУРИСТОВ ИЛИ ПОЛЕЗНЫХ ГРУЗОВ И ПОСЛЕДУЮЩЕГО ВОЗВРАЩЕНИЯ НА ЗЕМЛЮ | 2019 |
|
RU2736657C1 |
| СОЛНЕЧНАЯ ЭНЕРГЕТИЧЕСКАЯ РАКЕТНАЯ ДВИГАТЕЛЬНАЯ УСТАНОВКА ИМПУЛЬСНОГО ДЕЙСТВИЯ | 2001 |
|
RU2215891C2 |
| Космическая система обзора небесной сферы для наблюдения небесных объектов и обнаружения опасных для Земли небесных тел - астероидов и комет | 2015 |
|
RU2610066C1 |
| СПОСОБ ОДНОВРЕМЕННОГО ВЫВЕДЕНИЯ НЕСКОЛЬКИХ СПУТНИКОВ НА НЕ ЯВЛЯЮЩИЕСЯ КОМПЛАНАРНЫМИ ОРБИТЫ С ИСПОЛЬЗОВАНИЕМ СИЛЬНО ЭКСЦЕНТРИЧЕСКИХ ОРБИТ И АТМОСФЕРНОГО ТОРМОЖЕНИЯ | 1997 |
|
RU2220886C2 |
Изобретение относится к межпланетным полетам космических аппаратов (КА) с использованием маршевых реактивных, преимущественно электроракетных, двигателей. Предлагаемый способ включает вывод КА на гелиоцентрическую траекторию с удалением аппарата от Солнца и последующим его приближением к Солнцу. На части данной траектории за орбитой Земли реализуется активное движение КА при работе реактивных двигателей. Затем КА возвращается к Земле с приращением скорости и увеличивает свою гелиоцентрическую скорость в результате гравитационного маневра у Земли. При этом после пересечения КА орбиты Земли на участке его приближения к Солнцу и до входа в грависферу Земли осуществляют разгон КА повторным включением маршевых реактивных двигателей. На момент пролета Земли при осуществлении гравитационного маневра обеспечивают равенство угловых движений Земли и КА относительно Солнца. Во время пролета Земли на КА воздействует ее гравитационное поле, изменяющее вектор гелиоцентрической скорости КА, за счет чего происходит дальнейший разгон КА и формируется межпланетная траектория полета к цели. Техническим результатом изобретения является сокращение времени организации гравитационного маневра в поле тяготения Земли при выводе КА на требуемую межпланетную траекторию. 2 ил.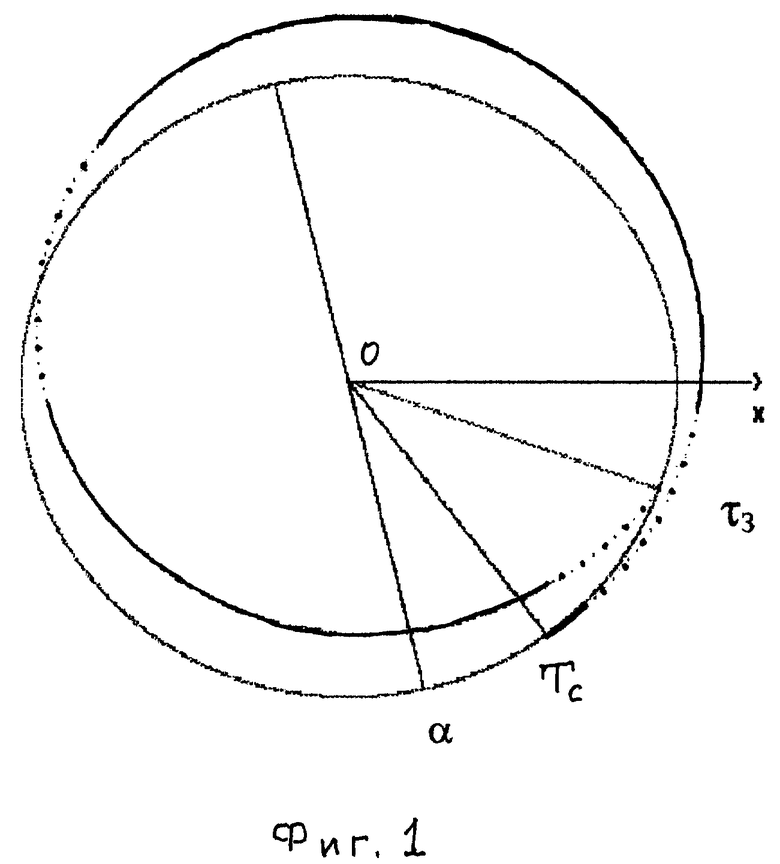
Способ выведения космического аппарата на межпланетную траекторию полета, включающий его вывод на гелиоцентрическую траекторию с удалением аппарата от Солнца и последующим его приближением к Солнцу, возврат к Земле с приращением скорости и увеличение гелиоцентрической скорости космического аппарата в результате гравитационного маневра у Земли, отличающийся тем, что после пересечения космическим аппаратом орбиты Земли на участке его приближения к Солнцу и до входа аппарата в грависферу Земли осуществляют разгон аппарата с помощью маршевых реактивных двигателей, обеспечивая равенство угловых движений Земли и космического аппарата относительно Солнца на момент пролета Земли.
| В.И.ЛЕВАНТОВСКИЙ | |||
| Механика космического полета в элементарном изложении | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| M., Наука, 1980, с.406, рис.152 | |||
| ФЕДОТОВ Г.Г | |||
| Оптимизация траекторий полета КА с ЭРД при использовании гравитационного маневра | |||
| Космические исследования, 2004, том 42, №4, с.404-413 | |||
| СПОСОБ ВЫВЕДЕНИЯ СПУТНИКА НА ГЕОСТАЦИОНАРНУЮ ОРБИТУ | 1999 |
|
RU2164880C1 |
| US 6253124 А, 26.06.2001. | |||

