Предлагаемое устройство относится к космической технике и применяется для изменения или стабилизации параметров орбиты и углового положения космического аппарата (КА). Особенно целесообразно применение устройства на высоких орбитах и, в частности, на геостационарной орбите.
Известны устройства, использующие два или более электроракетных двигателей (ЭРД), для одновременного управления параметрами орбиты геостационарного КА и его ориентации при помощи электростатического изменения направления вектора тяги [1].
Недостатками устройства являются: необходимость в режиме ориентации кратковременной, импульсной работы ЭРД, при котором значительно снижаются тяговые характеристики двигателя; необходимость компенсации не только знакопостоянных, но и знакопеременных возмущающих моментов; взаимовлияние операций управления параметрами ориентации и параметрами орбиты.
Также известны устройства управления движением в отдельности вокруг центра масс и центра масс КА [2, 3, 4, 5].
Наиболее близким по технической сущности к предлагаемому изобретению является устройство, состоящее из двух или более ЭРД, управляющих движением центра масс КА, и системы, управляющей движением вокруг центра масс КА, которая в каждом из каналов стабилизации содержит: формирователь сигнала углового отклонения КА, блок управления КА, блок управления исполнительным органом и исполнительный орган в виде электрического двигателя-маховика (ДМ) с исполнительным органом разгрузки (ИОР) кинетического момента этого ДМ [2].
Недостатком устройства является наличие отдельного блока ИОР, что снижает надежность работы и увеличивает массу устройства.
Целью изобретения исключение из состава блока ИОР.
Сущность изобретения состоит в том, что в предлагаемом устройстве функции ЭРД и ИОР совмещены и их выполняет один или более ЭРД с управляемой по направлению тягой. Управление тягой при помощи электромагнитного воздействия на процесс ускорения проще реализуется в плазменном ускорителе (ПУ) с замкнутым дрейфом электронов [6, 7, 8].
При расположении одного или более ЭРД на КА так, чтобы обеспечивалась возможность прохождения векторов тяг по меньшей мере в одной из ориентации векторов, вне центра масс КА это новое качество обеспечивает одновременное создание тяги и управляемого разгрузочного момента для ДМ, или более обобщенно для гидросилового стабилизатора. При этом исключается необходимость в импульсной работе ЭРД, интегрируются возмущающие моменты и снимается взаимовлияние операций управления параметрами ориентации и параметрами орбиты.
Технический результат, который достигается в предлагаемом устройстве, - это снижение массы за счет высокого удельного импульса тяги ЭРД, работающего в длительном режиме, и повышение надежности работы за счет исключения из состава устройства блока ИОР.
Указанный результат достигается тем, что в устройство управления движением космического аппарата, содержащее исполнительные органы в виде двигателей-маховиков, блок управления двигателями-маховиками с измерителями векторов их угловой скорости, а также один или более электроракетных двигателей с управляемой по направлению тягой, при этом электроракетные двигатели установлены с обеспечением возможности прохождения линий действия их тяг вне центра масс космического аппарата включен блок управления направлением тяги электроракетных двигателей, причем измеритель угловой скорости вращения каждого двигателя-маховика (ДМ) соединен с блоком управления направлением тяги (БУНТ) электроракетных двигателей.
Также устройство отличается тем, что в нем электроракетный двигатель выполнен в виде плазменного ускорителя (ПУ) с замкнутым дрейфом электронов, в котором по меньшей мере один источник магнитодвижущей силы в виде управляющей катушки намагничивания подключен к блоку управления направлением тяги.
Новым также является то, что в магнитную цепь плазменного ускорителя по меньшей мере к одному источнику магнитодвижущей силы добавлены одна или несколько управляющих катушек намагничивания, установленных у управляющего полюса.
Также отличительная особенность предлагаемого устройства состоит в том, что между по меньшей мере одной управляющей катушкой намагничивания и одной или несколькими дополнительными электромагнитными управляющими катушками установлен по меньшей мере один дополнительный управляющий полюс.
Сравнение заявляемого решения не только с прототипом, но и с другими близкими техническими решениями в космической технике не позволило выявить в них признаки, отличающие, в совокупности, заявляемое решение от прототипа, что позволяет сделать вывод о соответствии критерию "существенные отличия".
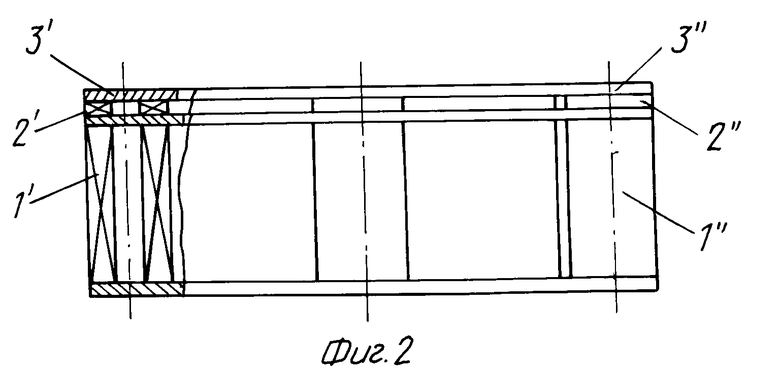
Для пояснения изобретения на фиг. 1 представлена функциональная схема соединений блоков и устройства, а на фиг. 2 - конструктивная схема ПУ с замкнутым дрейфом электронов и с отклоняемым вектором тяги.
Функциональная блок-схема устройства управления движением КА для одного из каналов стабилизации углового положения и одного из направлений движения центра масс КА (фиг. 1) содержит последовательно соединенные блоки: исполнительный орган в виде ДМ1 с блоком управления ДМ и измерителем вектора его угловой скорости 2. Выход измерителя вектора угловой скорости 2 соединен со входом управления направлением тяги 3, который, в свою очередь, соединен с ЭРД 4' и 4''.
Устройство (фиг. 1) работает следующим образом.
При накоплении ДМ1 предельной угловой скорости, о чем информирует БКНТ пороговый уровень сигнала, поступающего от измерителя 2, в блоке БУНТ 3 формируется информация о необходимом направлении отклонения вектора тяги для создания разгрузочного момента по этой оси. Блок 3 формирует команду на включение управляющих катушек намагничивания ЭРД 4' и 4'', управляющих направлением вектора тяги.
Сигнал на действие разгрузочного момента из блока 2 поступает в блок 3 до тех пор, пока кинетический момент ДМ1 не снизится до уровня нечувствительности измерителя 2.
Согласно изобретению ЭРД может быть выполнен в виде ПУ (фиг. 2), в котором имеются внешние источники магнитодвижущей силы, выполненные в виде электромагнитных катушек намагничивания 1', 1'' и управляющих катушек намагничивания 2', 2'' с дополнительными управляющими полюсами 3' и 3''.
Работа устройства (фиг. 2)
Отклонение вектора тяги ПУ в какой-либо плоскости производится путем снижения токов, текущих в управляющие катушки намагничивания 1', расположенные по одну сторону от оси ПУ в этой плоскости и увеличения токов в управляющих катушках намагничивания 1'', находящихся по другую сторону в этой плоскости. При этом вектор тяги отклоняется в сторону управляющих катушек намагничивания 1', в которых снижается ток, благодаря "перекосу" магнитного поля в эту сторону.
Ту же роль играют катушки намагничивания 2' и 2''. Катушки 2' снижают магнитное поле совместно с катушками 1' с одной стороны ПУ и увеличивают его с другой стороны совместно с катушками 1''.
Дополнительные управляющие полюсы 3' и 3'' способствуют "перекосу" полей в рабочей зоне ускорения.
Источники информации
1. Kanlan Marschall AJAA Pap., 1975, N 376, 1-12.
Вопросы проектирования и анализа функционирования систем управления с нулевым кинематическим моментом для геостационарных ИСЗ. Экспресс-информация. A и P N 38/75, ВНИИТИ.
2. Ануприенко Г. Е. Устройство для управления движением космического аппарата вокруг центра масс.
SU 1819 A1, B 64 G 1/24 от 31.07.90, Бюл. N 21, 07.06.93
Ануприенко Г. Е. Способ управления ориентацией космического объекта. SU 1811500 A3, B 64 G 1/28, 31.07.90, Бюл. N 15, 23.04.93.
4. Арцимович Л.А., Андронов И.М., Рылов Ю.П. и др.
Разработка стационарного плазменного двигателя (СПД) и его испытания на ИСЗ "МЕТЕОР". Космические исследования. т. X11, вып. 3., 1974. С. 451-468.
5. Разыграев А. П. Основы управления полетом космических аппаратов и кораблей., М.: Машиностроение, 1977.
6. Morozov B. and al. Demande de Brevet d'invention. Moteur a plasma a derive fermee d'electrons.
FR N de pullication 2693770, 21.01.94.
7. Egorov V. and al. Plasma accelerator with closed eltctron drift. U.S. Patent N 5, 218, 271, Jun. 8. 1993.
8. Беляев Н.М., Белик Н.П., Уваров Е.И., Реактивные системы управления космических летательных аппаратов. М.: Машиностроение 1979 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА | 2018 |
|
RU2706293C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СЕРВИСНОГО КОСМИЧЕСКОГО АППАРАТА | 2019 |
|
RU2714475C1 |
| УСКОРИТЕЛЬ ПЛАЗМЫ С ЗАМКНУТЫМ ДРЕЙФОМ ЭЛЕКТРОНОВ | 1995 |
|
RU2079984C1 |
| Прямоточный релятивистский двигатель | 2020 |
|
RU2776324C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ВЕКТОРА ТЯГИ ЭЛЕКТРОРАКЕТНОГО ДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2196396C2 |
| СПОСОБ ВЫВЕДЕНИЯ КОСМИЧЕСКОГО АППАРАТА С ГЕОПЕРЕХОДНОЙ ОРБИТЫ НА ГЕОСТАЦИОНАРНУЮ ОРБИТУ | 2009 |
|
RU2408506C1 |
| СПОСОБ НЕЙТРАЛИЗАЦИИ ОБЪЕМНОГО ЗАРЯДА ИОННОГО ПОТОКА | 2012 |
|
RU2520270C2 |
| СПОСОБ МЕЖОРБИТАЛЬНОЙ ТРАНСПОРТИРОВКИ ПОЛЕЗНЫХ ГРУЗОВ | 2009 |
|
RU2404091C1 |
| РЕАКТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА | 1999 |
|
RU2149805C1 |
| ЦИКЛОТРОННЫЙ ПЛАЗМЕННЫЙ ДВИГАТЕЛЬ | 2012 |
|
RU2517004C2 |
Изобретение относится к космической технике и может быть использовано для изменения или стабилизации параметров орбиты и ориентации космического аппарата (КА). Предлагаемое устройство содержит системы управления движением вокруг центра масс КА и движением центра масс КА, причем исполнительными органами обеих систем являются одни и те же электроракетные двигатели (ЭРД) с отклоняемыми векторами тяги. Функциональную развязку между указанными системами осуществляют двигатели-маховики (ДМ), которые также интегрируют возмущающие моменты, а для разгрузки ДМ предусмотрено регулирование, через блок управления, направлений тяг ЭРД, предпочтительно выполненных в виде плазменных ускорителей с замкнутым дрейфом электронов, снабженных подключенными к данному блоку управляющими катушками намагничивания и дополнительными управляющими полюсами. Устройство позволяет снизить массу и повысить надежность двигательной установки КА. 3 з.п.ф-лы, 2 ил.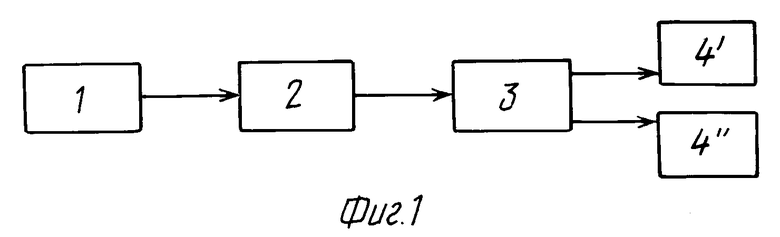
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Kaplan Marshall | |||
| Вопросы проектирования и анализа функционирования сис тем управления с нулевым кинетическим моментом для геостационарных ИС З /Эк спресс-информация | |||
| Астронавтика и ракетодинамика, N 38/75 | |||
| - : В ИНИТИ, 197 5 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Арцимович Л.А., Андронов И.М., Рылов Ю.П | |||
| и др | |||
| Разра ботка стационар ного плазменного двигателя (СПД) и его испытания на ИС З "Метеор" // Космич еские исследования, ч.ХП, вып.3, 1974, с.451-468 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| SU, авторское свидете льство, 1819834, B 64 G 1/24, 07.06.93. | |||
