Изобретение относится к измерительной технике и предназначено для измерения и контроля линейных и угловых ускорений в системах автоматического управления технологического оборудования.
Известен струйный датчик линейных ускорений, содержащий корпус, в котором установлены два штуцера для подвода рабочей среды (газа), два сопла для расхода среды из измерительных камер, две мембраны с инерционными поршнями, помещенными в цилиндрические головки с дренажными отверстиями, две параллельные перегородки, образующие полость, в которую помещен подпружиненный индикаторный золотник, разделяющий ее на надзолотниковую и подзолотниковую полости, каждая из которых сообщается через отверстия с соответствующей измерительной камерой, стабилизационную камеру с регулятором давления [1].
Недостаток известного устройства - низкая его чувствительность.
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому является акселерометр, содержащий шарообразную заслонку, расположенную в корпусе во взвешенном состоянии между соплами, подключенными к линии подвода рабочей среды через постоянные дроссели, измерительные камеры сопел соединены с соответствующими линиями выходного сигнала [2].
Недостаток известного устройства заключается в низкой чувствительности и точности измерений.
Техническим результатом предлагаемого изобретения является повышение чувствительности и точности измерения линейных и угловых ускорений объекта.
Поставленная цель достигается тем, что в измерительный преобразователь ускорений типа "сопло-заслонка", содержащий корпус, в котором между соосно закрепленными первым и вторым соплами размещена с возможностью перемещения заслонка, сопла подключены через первый и второй постоянные дроссели к линии подвода рабочей среды, измерительные камеры сопел соединены с первой и второй линиями управляющего сигнала, а корпус соединен с линией отвода среды, введены исполнительный элемент, подключенный к первой и второй линии управляющего сигнала, первый и второй магниты, соосно закрепленные на корпусе на одинаковом расстоянии от его геометрического центра, и третий и четвертый магниты, соосно закрепленные на концах заслонки с возможностью ее удержания во взвешенном состоянии на оси корпуса, при этом силы взаимодействия магнитов направлены в сторону геометрического центра корпуса.
Измерительный преобразователь ускорений типа "сопло-заслонка" (см. чертеж) содержит корпус 1, заслонку 2, первое и второе сопла 3 и 4, первый, второй и третий, четвертый магниты 5, 6 и 7, 8, первый и второй постоянные дроссели 9 и 10, линии подвода 11 и отвода 12 рабочей среды, первую и вторую линии управляющего сигнала 13 и 14 и исполнительный элемент 15.
В корпусе 1 измерительного преобразователя типа "сопло-заслонка" между соосно закрепленными первым и вторым соплами 3 и 4, подключенными через первый и второй постоянные дроссели 9 и 10 к линии подвода рабочей среды 11, установлена заслонка 2. При этом первый и второй магниты 5 и 6 соосно закреплены на корпусе 1 на одинаковом расстоянии от его геометрического центра, а третий и четвертый магниты 7 и 8 соосно закреплены на концах заслонки 2, удерживаемой на оси чувствительности, при этом силы взаимодействия магнитов направлены в сторону геометрического центра корпуса 1. Измерительные камеры первого и второго сопел 3 и 4 подключены через первую и вторую линии управляющего сигнала 13 и 14 к входам исполнительного элемента 15. Линия отвода рабочей среды 12 подключена к корпусу 1.
Измерительный преобразователь ускорений типа "сопло-заслонка" работает следующим образом.
В исходном положении на преобразователь не действуют инерционные силы. Рабочая среда подается под давлением P из линии подвода 11 через первый и второй постоянные дроссели 9 и 10 в измерительные камеры первого и второго сопел 3 и 4, из которых истекает в рабочее пространство корпуса 1. Заслонка 2 занимает симметричное положение в центре корпуса 1 под действием упругих сил, образованных парами магнитов 5, 7 и 6, 8, и создает одинаковые сопротивления истечению рабочей среды из сопел 3 и 4, что обуславливает равенство давлений в измерительных камерах P1 = P2. Из рабочего пространства корпуса 1 среда отводится через линию отвода 12.
При возникновении линейного ускорения ax объекта, направленного вдоль оси чувствительности, например вправо, под действием силы инерции Fи заслонка 2 перемещается влево на величину, пропорциональную ускорению. Сопротивление истечению рабочей среды из сопла 3 увеличивается, а из сопла 4 уменьшается, что приводит к соответствующему изменению давлений в измерительных камерах P1>P2 и линиях 13 и 14 управляющего сигнала. Возникающая разность давлений ΔP = P1 - P2 на входах исполнительного элемента 15 приводит его в действие. Последний формирует результирующий сигнал, несущий информацию о величине ускорения объекта.
Для формирования выходного сигнала исполнительный элемент 15 в предлагаемом преобразователе выполнен в виде четырехщелевого золотникового распределителя с пружинным центрированием. Под действием разности давлений ΔP, подводимых по линиям 13 и 14 под торцы золотника, последний смещается в своем корпусе, изменяя проходные сечения соответствующих щелей и, тем самым, формируя результирующий сигнал, который используется для регистрации ускорения или управления технологическим оборудованием.
Вместе с тем, предлагаемый измерительный преобразователь ускорений типа "сопло-заслонка" может быть использован для измерения угловых ускорений aw. В этом случае ось вращения объекта, перпендикулярная оси чувствительности должна находиться на некотором расстоянии слева или справа от геометрического центра корпуса 1 преобразователя. При этом работа преобразователя не отличается от рассмотренной выше.
Повышение чувствительности измерительного преобразователя ускорений типа "сопло-заслонка" обеспечивается за счет уменьшения трения заслонки 2 в корпусе 1 в результате ее радиального магнитного подвеса и возможности устанавливать требуемую величину магнитных сил удержания путем регулирования расстояния между магнитами 5 и 6.
Конструктивная схема измерительного преобразователя ускорений типа "сопло-заслонка" приведена на чертеже.
Применение магнитного подвеса заслонки в предлагаемом преобразователе и возможность производить измерения линейных и угловых ускорений объекта делает его энергоэкономичным и расширяет функциональные возможности, позволяя использовать в различных технических системах. Это существенно отличает его от известных устройств данного типа.
Источники информации
1. Авторское свидетельство СССР N 836594, G 01 P 15/02, 1981.
2. Залманзон Л.А. Аэрогидродинамические методы измерения входных параметров автоматических систем. - М.: Наука, 1973, с. 307 - 309, рис. 7.15а.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УСКОРЕНИЙ ТИПА "СОПЛО-ЗАСЛОНКА" | 2005 |
|
RU2293994C1 |
| МАГНИТОСТРИКЦИОННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 2000 |
|
RU2171921C1 |
| МАГНИТОСТРИКЦИОННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 1999 |
|
RU2170370C1 |
| МАГНИТОСТРИКЦИОННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 2005 |
|
RU2293888C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ-ПРЕОБРАЗОВАТЕЛЬ | 2006 |
|
RU2330191C2 |
| Способ бесконтактного определения направления вращения и измерения скорости вращения объекта | 2024 |
|
RU2831667C1 |
| МАГНИТОСТРИКЦИОННЫЙ ДИФФЕРЕНЦИАЛЬНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 2000 |
|
RU2176753C1 |
| Устройство для определения направления и скорости вращения вала | 2024 |
|
RU2832123C1 |
| ЖИДКОСТНО-ГАЗОВЫЙ ЭЖЕКТОР | 1994 |
|
RU2072454C1 |
| МАГНИТНЫЙ ГАЗОАНАЛИЗАТОР | 2001 |
|
RU2204828C1 |
Преобразователь предназначен для измерения и контроля линейных и угловых ускорений объекта. Преобразователь состоит из немагнитных корпуса, инерционной заслонки и двух сопл, двух пар постоянных магнитов, двух постоянных дросселей, линий подвода и отвода рабочей среды, двух линий управляющего сигнала и исполнительного элемента. Обеспечивается повышение чувствительности, точности измерений ускорений, энергоэкономичности и расширение функциональных возможностей. 1 ил.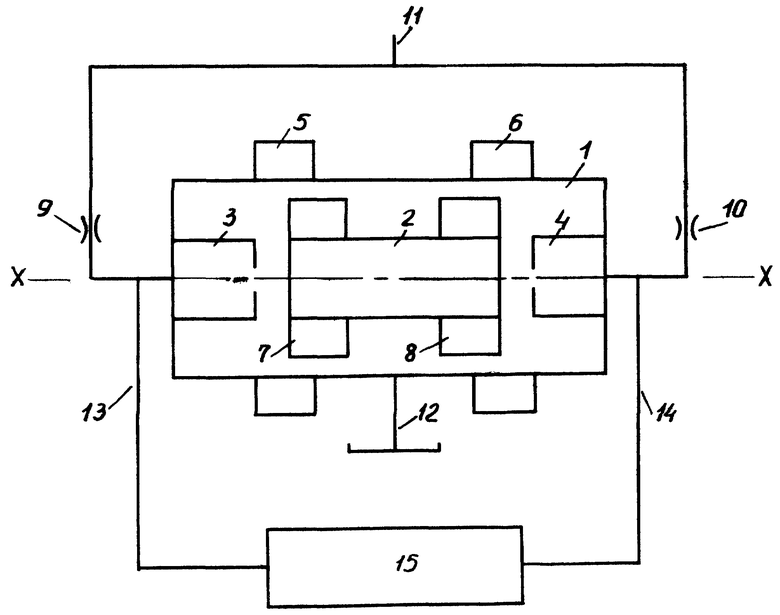
Измерительный преобразователь ускорений типа сопло-заслонка, содержащий корпус, в котором между соосно закрепленными первым и вторым соплами размещена с возможностью перемещения заслонка, сопла подключены через первый и второй постоянные дроссели к линии подвода рабочей среды, измерительные камеры сопл соединены с первой и второй линиями управляющего сигнала, а корпус соединен с линией отвода среды, отличающийся тем, что в него введены исполнительный элемент, подключенный к первой и второй линиям управляющего сигнала, первый и второй магниты, соосно закрепленные на корпусе на одинаковом расстоянии от его геометрического центра, и третий и четвертый магниты, соосно закрепленные на концах заслонки с возможностью ее удержания во взвешенном состоянии на оси корпуса, при этом силы взаимодействия магнитов направлены в сторону геометрического центра корпуса.
| Залманзон Л.А | |||
| Аэрогидродинамические методы измерения входных параметров автоматических систем | |||
| - М.: Наука, 1973, с.307 - 309 | |||
| US 3244011 A, 05.04.66 | |||
| Пневматический дифференциальный датчик модуля линейного ускорения | 1983 |
|
SU1182405A1 |
| US 3152485 A, 13.10.64 | |||
| ЗВУКОИЗОЛИРУЮЩЕЕ ОКНО | 2002 |
|
RU2222679C1 |
