Изобретение относится к системам управления гидрофицированным технологическим оборудованием и может быть использовано для управления исполнительными механизмами электрогидравлических приводов.
Известен электрогидравлический усилитель, содержащий корпус, распределительный элемент, пьезокерамический привод, поршень, связанный с упругим элементом через мультипликатор в виде упругой пластины (RU 2228465 С2, (Штыков В.А. и др.), 10.05.2004).
Предложенная конструкция имеет люфты между поршнями и мультипликатором в пьезокерамическом приводе, что отрицательно сказывается на точности устройства. Применение пьезокерамических исполнительных элементов снижает устойчивость устройства к механическим ударам и требует применения высоковольтных источников вторичного питания.
Известен электрогидравлический усилитель, содержащий корпус, гильзу из немагнитного материала с распределительным золотником, стержень из магнитострикционного материала, электрическую обмотку и вычислитель (SU 1710864 А1, (ПЕНЗЕНСКОЕ ПО «ЭРА»), 07.02.1992).
Одностороннее преобразование не позволяет уменьшить температурную погрешность магнитострикционного привода и имеет ограниченный диапазон перемещений, определяемый линейной длиной привода и магнитострикционной постоянной. Это ограничивает область технического использования устройства.
Наиболее близким по технической сущности к заявляемому устройству является электрогидравлический усилитель, выбранный в качестве прототипа. Он содержит источник рабочей жидкости, гильзу из немагнитного материала, разделительную перегородку, два сопла, две заслонки, линии подвода рабочей жидкости, два постоянных дросселя, два магнитострикционных исполнительных элемента с заслонками в форме стакана, управляющие обмотки и две части блока управления (RU 2171921 С1, (ПЕНЗЕНСКИЙ ГУ), 10.08.2001).
Указанное устройство обладает недостаточной точностью позиционирования заслонок, поскольку геометрия применяемых исполнительных элементов не позволяет уменьшить влияние температурной составляющей погрешности и увеличить диапазон преобразования.
Техническим результатом предлагаемого изобретения является повышение точности и расширение диапазона преобразования.
Это достигается тем, что в магнитострикционный электрогидравлический усилитель, содержащий источник рабочей жидкости, подключенный к золотниковому распределительному устройству через первую и вторую линии подвода рабочей жидкости с постоянными дросселями и соединенный с дифференциальными соплами, введен С-образный магнитострикционный исполнительный элемент с заслонками, закрепленными на его концах и взаимодействующими с дифференциальными соплами через рабочую жидкость, блок управления, подключенный к противофазным управляющим обмоткам, установленным на рабочих участках С-образного магнитострикционного исполнительного элемента.
На чертеже представлена структурная схема магнитострикционного электрогидравлического усилителя.
Магнитострикционный электрогидравлический усилитель содержит источник 1 рабочей жидкости, линии 2, 3 подвода рабочей жидкости, постоянные дроссели 4, 5, распределительное устройство 6, сопла 7, 8, заслонки 9, 10, С-образный магнитострикционный исполнительный элемент 11, управляющие обмотки 12, 13 и 14, 15, блок управления 16, а также линии Р, Т, А, В напора, слива и гидродвигателя, соответственно.
Источник 1 рабочей жидкости через линии 2, 3 подвода жидкости с постоянными дросселями 4, 5 соединен с двумя неподвижными соосными соплами 7, 8. Расход жидкости через сопла и, следовательно, перемещение золотникового распределительного устройства 6 регулируется перемещением заслонок 9, 10, выполненных в форме стакана и установленных на концах С-образного магнитострикционного исполнительного элемента, жестко присоединенного к корпусу в своей средней части. Поверх магнитострикционного элемента установлены две пары управляющих обмоток 12, 13 и 14, 15, включенные в противофазе и соединенные с блоком управления 16.
Магнитострикционный электрогидравлический усилитель работает следующим образом.
В исходном состоянии заслонки 9, 10 находятся в среднем положении, на расстоянии Δl от кромок сопел 7, 8. В этом положении сопротивления сопел уравниваются. При подаче токового сигнала блока управления 16 на первую пару управляющих обмоток 12, 13 последние создают продольные магнитные поля, которые воздействуют на магнитострикционный исполнительный элемент и вызывают смещение заслонки 9 влево на величину Δl13, а заслонки 10 влево на величину Δl12, где Δl12, Δl13 - магнитострикционные деформации участков l12, l13 исполнительного элемента под обмотками 12, 13, соответственно. Подавая противофазный сигнал управления на вторую пару обмоток 14, 15, можно вызвать смещение заслонок 9, 10 вправо, в результате магнитострикционных деформаций Δl14 и Δl15 соответствующих участков l14 и l15 исполнительного элемента. Регулируя расход жидкости через сопла 7, 8, можно изменять положение распределительного устройства 6, выполненного в виде четырехщелевого золотника с центрирующими пружинами, а значит и управлять давлением в линиях А, В гидродвигателя.
Управляющие обмотки имеют одинаковую длину l12=l13=l14=l15=l. Если токовый сигнал управления максимален, то они могут вызывать удлинения участков исполнительного элемента

где Δl12max, Δl13max, Δl14max, Δl15max - максимальные значения магнитострикционной деформации на соответствующих участках магнитострикционного элемента. Начальное расстояние ΔlH между соплами 7, 8 и заслонками 9, 10 выбрано равным Δl. Тогда зазор ΔХ7-9 между соплом 7 и заслонкой 9 составит
ΔX7-9=Δl+(l15+Δl15)-(l13+Δl13)=Δl+(Δl15-Δl13).
На обмотки 13 и 15 подается противофазный сигнал. Поэтому, если Δl15=0, то Δl13=Δlmax, и наоборот. Следовательно, разность (Δl15-Δl13) может принимать значения в диапазоне от -Δl до +Δl, а величина ΔХ7-9 находится в пределах от 0 до 2Δl. При этом зазор ΔX8-10 между соплом 8 и заслонкой 10 можно найти по формуле
ΔX8-10=Δl+(l12+Δl12)-(l14+Δl14)=Δl+(Δl12-Δl14).
Причем, если ΔX7-9=2Δl, то ΔX8-10=0, и наоборот.
Таким образом, величина перемещения заслонки будет в два раза больше, чем у прототипа, где использовался прямолинейный магнитострикционный элемент. Это увеличивает диапазон преобразования заявляемого устройства относительно прототипа и расширяет область его применения.
Применение в исполнительном элементе предлагаемого усилителя металлического магнитострикционного материала, характеризующегося высокими временными показателями, магнитными и магнитострикционными характеристиками, позволяет повысить его динамическую точность и надежность, что отличает усилитель от выбранного прототипа.
Предлагаемая С-образная форма магнитострикционного исполнительного элемента 11 позволяет уменьшить влияние температурной составляющей погрешности позиционирования. Действительно, если участок l13 магнитострикционного исполнительного элемента 11 под действием температуры окружающей среды изменяет свои размеры на величину ΔlT, то размеры участка l15 изменются на эту же величину (I):
X7-9=Δl+(l15+Δl15+ΔlT)-(l13+Δl13+ΔlT)=Δl+Δl15-Δl13.
Следовательно, заявляемое устройство обладает более высокой точностью и более широким диапазоном преобразования по сравнению с прототипом, что расширяет область его технического применения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОПЛЕЧЕВОЙ МАГНИТОСТРИКЦИОННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 2007 |
|
RU2335662C1 |
| МНОГОПЛЕЧЕВОЙ МАГНИТОСТРИКЦИОННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ ПРЯМОГО УПРАВЛЕНИЯ | 2007 |
|
RU2335663C1 |
| МАГНИТОСТРИКЦИОННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 2007 |
|
RU2339852C1 |
| МАГНИТОСТРИКЦИОННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 2007 |
|
RU2339851C1 |
| РЫЧАЖНЫЙ МАГНИТОСТРИКЦИОННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ ПРЯМОГО УПРАВЛЕНИЯ | 2007 |
|
RU2338933C1 |
| РЫЧАЖНЫЙ МАГНИТОСТРИКЦИОННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 2007 |
|
RU2338934C1 |
| МАГНИТОСТРИКЦИОННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 2005 |
|
RU2300672C2 |
| МАГНИТОСТРИКЦИОННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ С ПРОПОРЦИОНАЛЬНЫМ УПРАВЛЕНИЕМ | 2006 |
|
RU2324844C2 |
| МАГНИТОСТРИКЦИОННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 2000 |
|
RU2171921C1 |
| МАГНИТОСТРИКЦИОННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 1999 |
|
RU2170370C1 |
Усилитель предназначен для управления исполнительными механизмами электрогидравлических приводов. Усилитель содержит источник рабочей жидкости, подключенный к золотниковому распределительному устройству через первую и вторую линии подвода рабочей жидкости с постоянными дросселями и соединенный с дифференциальными соплами, при этом в него введен С-образный магнитострикционный исполнительный элемент с заслонками, закрепленными на его концах и взаимодействующими с дифференциальными соплами через рабочую жидкость, блок управления, подключенный к противофазным управляющим обмоткам, установленным на рабочих участках С-образного магнитострикционного исполнительного элемента. Технический результат: повышение точности и расширение диапазона преобразования. 1 ил.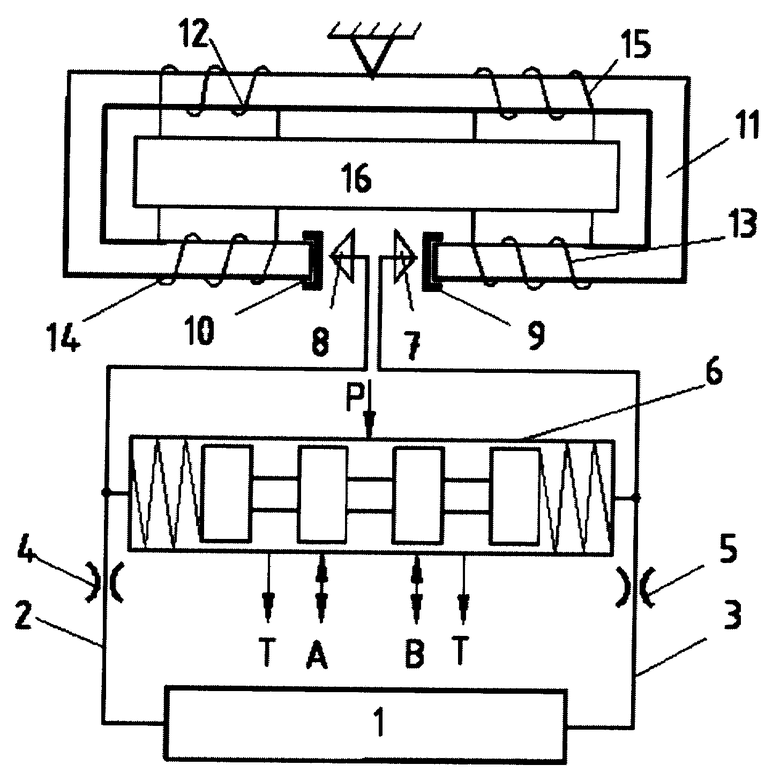
Магнитострикционный электрогидравлический усилитель, содержащий источник рабочей жидкости, подключенный к золотниковому распределительному устройству через первую и вторую линии подвода рабочей жидкости с постоянными дросселями и соединенный с дифференциальными соплами, отличающийся тем, что в него введен С-образный магнитострикционный исполнительный элемент с заслонками, закрепленными на его концах, и взаимодействующими с дифференциальными соплами через рабочую жидкость, блок управления, подключенный к противофазным управляющим обмоткам, установленным на рабочих участках С-образного магнитострикционного исполнительного элемента.
| МАГНИТОСТРИКЦИОННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 2000 |
|
RU2171921C1 |
| Электрогидравлический усилитель | 1990 |
|
SU1710864A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РАСПРЕДЕЛИТЕЛЬ | 2002 |
|
RU2228465C2 |
| DE 3714337 A1, 10.11.1988 | |||
| DE 19547149 A1, 19.06.1997. | |||

