Изобретение относится к измерительной технике и предназначено для измерения и контроля линейных и угловых ускорений в системах автоматического управления технологическим оборудованием.
При оптимальном автоматическом управлении процессами обработки на металлообрабатывающих станках для достижения наилучших технико-экономических показателей требуется обеспечить как заданную траекторию относительного движения инструмента и заготовки, так и непрерывное управление параметрами режима в зависимости от изменяющихся условий. Эта задача может быть решена за счет оснащения технологического оборудования адаптивными системами, автоматически реагирующими на изменение условий обработки. Наибольшее распространение получили адаптивные системы функционального регулирования, в которых управляющее воздействие является функцией какого-либо параметра (Тверской М.М. Автоматическое управление режимами обработки деталей на станках. - М.: Машиностроение, 1982).
Известен акселерометр, содержащий шарообразную заслонку, расположенную в корпусе во взвешенном состоянии между соплами, подключенными к линии подвода рабочей среды через постоянные дроссели, измерительные камеры сопл соединены с соответствующими линиями выходного сигнала [1].
Недостатками известного устройства являются низкие чувствительность и точность измерений, недостаточный диапазон изменения измеряемого ускорения.
В качестве прототипа по технической сущности и достигаемому эффекту к предлагаемому выбран измерительный преобразователь ускорений типа «сопло-заслонка», содержащий корпус, в котором между соосно расположенными первым и вторым соплами размещена с возможностью перемещения заслонка, сопла подключены через первый и второй постоянные дроссели к линии подвода рабочей среды, измерительные камеры сопл соединены с первой и второй линиями управляющего сигнала, а корпус соединен с линией отвода среды, исполнительный элемент подключен к первой и второй линиям управляющего сигнала, первый и второй магниты соосно размещены на корпусе на одинаковом расстоянии от его геометрического центра, третий и четвертый магниты соосно закреплены на концах заслонки с возможностью ее удержания во взвешенном состоянии на оси корпуса, при этом силы взаимодействия магнитов направлены в сторону геометрического центра корпуса [2].
Недостатками известного устройства являются низкие чувствительность и недостаточный диапазон измеряемого ускорения, обусловленные постоянной жесткостью магнитного подвеса, независящего от нагрузки, действующей на объект.
Техническим результатом предлагаемого изобретения является повышение чувствительности и расширение диапазона измеряемых ускорений.
Поставленная цель достигается тем, что в измерительный преобразователь ускорений типа «сопло-заслонка», содержащий корпус, в котором между соосно расположенными первым и вторым соплами размещена с возможностью перемещения заслонка, сопла подключены через первый и второй постоянные дроссели к линии подвода рабочей среды, измерительные камеры сопл соединены с первой и второй линиями управляющего сигнала, а корпус соединен с линией отвода среды, исполнительный элемент подключен к первой и второй линиям управляющего сигнала, первый и второй магниты соосно размещены на корпусе на одинаковом расстоянии от его геометрического центра, третий и четвертый магниты соосно закреплены на концах заслонки с возможностью ее удержания во взвешенном состоянии на оси корпуса, при этом силы взаимодействия магнитов направлены в сторону геометрического центра корпуса, введены второй цилиндр, третья линия управляющего сигнала, объединяющая через регулируемый дроссель второй цилиндр и исполнительный элемент, упругий элемент механически соединен с первым и вторым магнитами, обеспечивая возможность их дифференциального перемещения вдоль оси первого цилиндра.
Конструктивная схема измерительного преобразователя ускорений типа «сопло-заслонка» приведена на чертеже.
Адаптивный измерительный преобразователь ускорений типа «сопло-заслонка», содержит первый цилиндр 1, второй цилиндр 2, заслонку 3, первое и второе сопла 4, 5, первый, второй, третий, четвертый магниты 6, 7 и 8, 9, упругий элемент 10, первый и второй постоянные дроссели 11, 12, линии подвода 13 и отвода 14 рабочей среды, первую, вторую и третью линии управляющего сигнала 15, 16, 18, исполнительный элемент 17 и регулируемый дроссель 19.
Во втором цилиндре 2, выполняющим роль корпуса, адаптивного измерительного преобразователя типа «сопло-заслонка» размещен первый цилиндр 1, в котором между соосно расположенными первым и вторым соплами 4, 5, подключенными через первый и второй постоянные дроссели 11, 12 к линии подвода рабочей среды 13, установлена заслонка 3. При этом первый и второй магниты 6, 7 соосно размещены на первом цилиндре 1 на одинаковом расстоянии от его геометрического центра, а третий и четвертый магниты 8, 9 соосно закреплены на концах заслонки 3, удерживаемой на оси чувствительности Х-Х, при этом силы взаимодействия магнитов направлены в сторону геометрического центра первого цилиндра 1. Измерительные камеры первого и второго сопл 4, 5 подключены через первую 15 и вторую 1 6 линии управляющего сигнала к входам исполнительного элемента 17. Линия отвода рабочей среды 14 подключена к первому 1 и второму 2 цилиндрам. Упругий элемент 10, представляющий собой пружину, закрепленную посередине в центре первого цилиндра 1, соединен с первым и вторым магнитами 6, 7 с возможностью их дифференциального перемещения вдоль оси первого цилиндра 1 с сохранением одинакового расстояния от его геометрического центра. Второй цилиндр 2 подключен через третью линию 18 управляющего сигнала и регулируемый дроссель 19 к исполнительному элементу 17.
Адаптивный измерительный преобразователь ускорений типа «сопло-заслонка» работает следующим образом.
В исходном положении на преобразователь не действуют инерционные силы. Рабочая среда подается под давлением Р из линии подвода 13 через первый и второй постоянные дроссели 11 и 12 в измерительные камеры первого и второго сопл 4 и 5, из которых истекает в рабочее пространство первого цилиндра 1 и по первой и второй линиям 15 и 16 управляющего сигнала подводится к исполнительному элементу 17. Заслонка 3 занимает симметричное положение в центре первого цилиндра 1 под действием упругих сил, образованных парами магнитов 6, 8 и 7, 9 (магнитный подвес) и создает одинаковые сопротивления истечению рабочей среды из сопл 4 и 5. Это обусловливает равенство давлений Р1 и Р2 в измерительных камерах. Из рабочего пространства первого цилиндра 1 среда отводится через линию 14 отвода. Рабочая среда от исполнительного элемента 17 через третью линию 18 управляющего сигнала и регулируемый дроссель 19 подается во второй цилиндр 2 и воздействует на магниты 6 и 7. Упругий элемент 10, выполненный в виде пружины, механически соединен с магнитами 6, 7 и закреплен посередине первого цилиндра 1. При этом силы, действующие на магниты 6 и 7, вызванные давлением среды, уравновешиваются силой, создаваемой упругим элементом 10.
При возникновении линейного ускорения ах объекта, на котором расположен адаптивный преобразователь, направленного вдоль оси чувствительности Х-Х (например, вправо, тогда под действием силы инерции Fu заслонка 3 перемещается влево на величину, пропорциональную ускорению аx). Сопротивление истечению рабочей среды из сопла 4 увеличивается, а из сопла 5 уменьшается. Это приводит к соответствующему изменению давлений (Р1 больше Р2) в измерительных камерах и в линиях 15 и 16 управляющего сигнала. Возникающая разность давлений ΔР=P1-Р2 на входах исполнительного элемента 17 заставляет его перемещаться. Последний формирует результирующий сигнал о величине ускорения объекта.
Для формирования выходного сигнала исполнительный элемент 17 в предлагаемом преобразователе выполнен, например, в виде четырехщелевого золотникового распределителя с пружинным центрированием. Под действием разности давлений ΔР среды, подводимой по линиям 15 и 16 под торцы золотника, он смещается в своем корпусе, изменяя проходные сечения соответствующих щелей, тем самым формируя результирующий сигнал, который используется для регистрации ускорения или управления технологическим оборудованием.
Одновременно рабочая среда под давлением, пропорциональным ускорению объекта, поступает от исполнительного элемента 17 через третью линию 18 управляющего сигнала и регулируемый дроссель 19 во второй цилиндр 2 и воздействует на первый и второй магниты 6, 7. В результате чего они дифференциально перемещаются в сторону геометрического центра первого цилиндра 1, увеличивая жесткость магнитного подвеса, изменяя диапазон измеряемых ускорений. Повышение жесткости магнитного подвеса позволяет обеспечить требуемую чувствительность при более высокой скорости движения объекта и наоборот. Введение регулируемого дросселя 19 дает возможность задавать задержку регулирования жесткости магнитного подвеса.
При уменьшении ускорения объекта первый и второй магниты 6 и 7 под действием силы упругого элемента 10 дифференциально перемещаются от геометрического центра первого цилиндра 1. Это приводит к уменьшению сил магнитного взаимодействия и повышению чувствительности преобразователя.
Вместе с тем, предлагаемый адаптивный измерительный преобразователь ускорений типа «сопло-заслонка» может быть использован для измерения угловых ускорений аω. В этом случае ось вращения объекта (перпендикулярная оси чувствительности Х-Х) должна находиться на некотором расстоянии слева или справа от геометрического центра первого цилиндра 1 преобразователя. При этом работа преобразователя не отличается от рассмотренной выше.
Повышение чувствительности и расширение диапазона изменения ускорений измерительного преобразователя обеспечивается за счет возможности автоматического регулирования требуемой величины магнитных сил удержания (жесткости магнитного подвеса) заслонки 3 путем изменения расстояния между магнитами 6 и 7 в зависимости от действующего ускорения. Это расширяет область технического использования предлагаемого преобразователя и существенно отличает его от выбранного прототипа.
Техническая реализация: элементы 1, 2, 3, 4, 5 выполнены из немагнитного материала (сплав БрА9ЖЗЛ); элементы 6, 7, 8, 9 - ферромагнит марки ЮНДК25А.
Источники информации
1. Залманзон Л.А. Аэрогидродинамические методы измерения входных параметров автоматических систем. - М.: Наука, 1973, с.307-309, рис.7.15, а.
2. Патент РФ №2150116, G 01 P 15/00, 2000.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УСКОРЕНИЙ ТИПА "СОПЛО-ЗАСЛОНКА" | 1998 |
|
RU2150116C1 |
| МАГНИТОСТРИКЦИОННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 2000 |
|
RU2171921C1 |
| МАГНИТОСТРИКЦИОННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 1999 |
|
RU2170370C1 |
| Активная подвеска корпуса транспортного средства | 1978 |
|
SU783060A1 |
| МАГНИТОСТРИКЦИОННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 2005 |
|
RU2293888C1 |
| СЛЕДЯЩИЙ ГИДРОПРИВОД СИСТЕМЫ УПРАВЛЕНИЯ САМОЛЕТА | 1984 |
|
SU1228395A1 |
| МАГНИТОСТРИКЦИОННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ С ПРОПОРЦИОНАЛЬНЫМ УПРАВЛЕНИЕМ | 2006 |
|
RU2324844C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ-ПРЕОБРАЗОВАТЕЛЬ | 2006 |
|
RU2330191C2 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1993 |
|
RU2039994C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ И СТЕНД ДЛЯ ИСПЫТАНИЯ ДЫХАТЕЛЬНЫХ АППАРАТОВ | 2003 |
|
RU2256107C1 |
Изобретение относится к измерению и контролю линейных и угловых ускорений объекта. Адаптивный измерительный преобразователь ускорений типа "сопло-заслонка" состоит из немагнитных первого 1 и второго 2 цилиндров, заслонки 3 и двух сопл 4 и 5, двух пар постоянных магнитов 6, 8 и 7, 9, упругого элемента 10, двух постоянных дросселей 11, 12, линий подвода и отвода рабочей среды 13 и 14, трех линий управляющего сигнала 15, 16 и 18, исполнительного элемента 17 и регулируемого дросселя 19. Принцип работы измерительного преобразователя заключается в автоматическом регулировании жесткости магнитного подвеса в зависимости от действующего ускорения объекта. Технический результат: повышение чувствительности и расширение диапазона измеряемых линейных и угловых ускорений объекта, расширение области технического использования. 1 ил.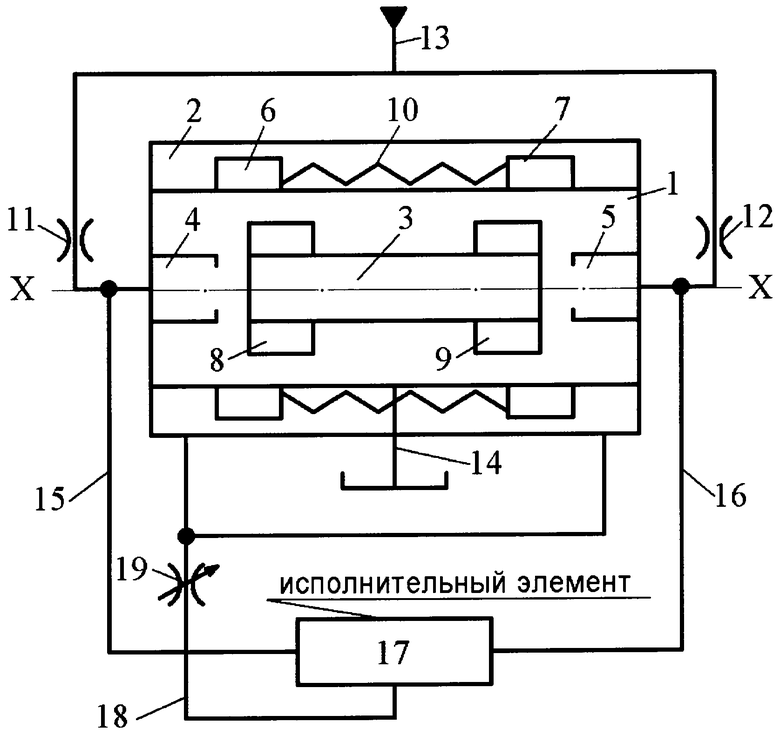
Адаптивный измерительный преобразователь ускорений типа «сопло-заслонка», содержащий цилиндр с соосно закрепленными первым и вторым соплами, подключенными через первый и второй постоянные дроссели к линии подвода рабочей среды, где размещена заслонка с возможностью перемещения, первый и второй магниты, закрепленные соосно на цилиндре на равном расстоянии от его геометрического центра, третий и четвертый магниты, соосно закрепленные на концах заслонки и расположенные между первым и вторым магнитами, исполнительные камеры сопл через первую и вторую линии управляющего сигнала соединены с исполнительным элементом, а цилиндр соединен с линией отвода среды, отличающийся тем, что в него введены второй цилиндр, закрепленный соосно снаружи первого цилиндра, третья линия управляющего сигнала, объединяющая через регулируемый дроссель второй цилиндр и исполнительный элемент, упругий элемент механически соединен с первым и вторым магнитами, обеспечивая возможность их дифференциального перемещения вдоль оси первого цилиндра.
| ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УСКОРЕНИЙ ТИПА "СОПЛО-ЗАСЛОНКА" | 1998 |
|
RU2150116C1 |
| Пневматический дифференциальный датчик модуля линейного ускорения | 1983 |
|
SU1182405A1 |
| Струйный датчик линейных ускорений | 1979 |
|
SU836594A1 |
| US 3152485 A, 13.10.1964 | |||
| ЗВУКОИЗОЛИРУЮЩЕЕ ОКНО | 2002 |
|
RU2222679C1 |

