Изобретение относиться к гидроавтоматике и может быть использован для управления исполнительными гидравлическими механизмами различных машин.
Известен электрогидравлический усилитель, который содержит два коммутатора, генератор колебаний, электронный ключ, по два электронных усилителя и пьезокерамических электромеханических преобразователя, распределительный механизм типа "сопло-заслонка", состоящего из двух сопел и разделяющих их заслонки, силового элемента в виде обоймы с запрессованным по периметру в ней пьезокерамическим стержнем [1].
Известное устройство имеет сложную структуру исполнительного механического механизма, что ведет к снижению точности и быстродействия преобразования, технологичности, надежности, повторяемости выходных рабочих характеристик, к увеличению стоимости изготовления. Так, например, на точность преобразования сильное влияние оказывает линейная длина рычаговой заслонки дифференциальных сопел из-за наличия вибрационной составляющей погрешности, которая однозначно возрастает с увеличением ее длины. Это усугубляется еще и тем, что данный узел работает в шаговом режиме, дискретно перемещая заслонки между соплами по сигналам электронного блока управления устройства. Кроме того, влияние температуры окружающей среды, наличие вибраций промышленной частоты (100-120 Гц) увеличивает погрешности преобразования исполнительного механического узла из-за наличия кинематических соединений, имеющих, как известно люфт [1].
Быстродействие данного устройства также недостаточно, т.к. перемещение осуществляется дискретно и зависит от частоты и амплитуды управляемого сигнала, что несомненно ниже, чем в аналогичных устройствах с прямым аналоговым управлением, а не через возбуждение продольных колебаний в носителе, как имеет место в [1]. Выполнение исполнительных элементов из пьезокерамики снижает устойчивость к механическим импульсам (ударам), требует применения высоковольтных источников вторичного питания (U > 2,5 кВ) и должной диэлектрической защиты элементов конструкции.
Наиболее близким по технической сущности к заявляемому устройству является электрогидравлический преобразователь, выбранный в качестве прототипа [2] . Он содержит две винтовые цилиндрические пружины из пьезокерамического материала, поворотную заслонку, расположенную между двух сопел, два постоянных дросселя, золотник и электрическую цепь для подключения источника переменных сигналов (колебаний).
При всей своей технической простоте построения и технологичности известное устройство имеет недостаточные точность и быстродействие преобразования. Это объясняется следующим. Предложенная конструкция электромеханического преобразователя содержит дифференциальные исполнительные пружины из пьезокерамического материала, которые упираются в поворотную заслонку, имеющую ось вращения. Такая конструкция имеет люфт, снижающий точность и чувствительность устройства. Этому способствует радиальное перемещение рычаговой заслонки между дифференциальными соплами, ее линейная длина. С другой стороны, частотное управление пьезокерамическими дифференциальными пружинами снимает быстродействие устройства в целом. Кроме того, использование в данном устройстве элементов из пьезокерамики снижает его устойчивость к механическим ударам, вибрациям, нуждается в применении высоковольтных источников вторичного питания [см., например, Джагупов Р.Г., Ерофеев А.А. Пьезокерамические элементы в приборостроении и автоматике. - Л.: Машиностроение, 1986. - 256 с.], что по мнению авторов можно отнести к недостаткам или особенностям пьезокерамических исполнительных устройств.
Техническим результатом предлагаемого изобретения является повышение точности и быстродействия преобразования сигнала.
Это достигается тем, что в магнитострикционный электрогидравлический усилитель, содержащий источник рабочей жидкости, подключенный к дифференциальным соплам через первую и вторую линии подвода рабочей жидкости с постоянными дросселями, и блок управления, состоящий из двух частей, введена гильза, разделенная перегородкой на две равные части, поверх которой неподвижно установлены первая и вторая управляющие обмотки, закрепленные по ее оси на торцевых поверхностях, введены первый и второй магнитострикционные исполнительные элементы, смежные концы которых жестко соединены с перегородкой гильзы, а противоположные - с первой и второй заслонками, выполненные в форме стакана, соответственно.
Кроме того, в магнитострикционный электрогидравлический усилитель дополнительно введен элемент подмагничивания в виде постоянного магнита, состоящего из двух паритетных частей и закрепленного соосно с первой и второй управляющими обмоток по всей их длине.
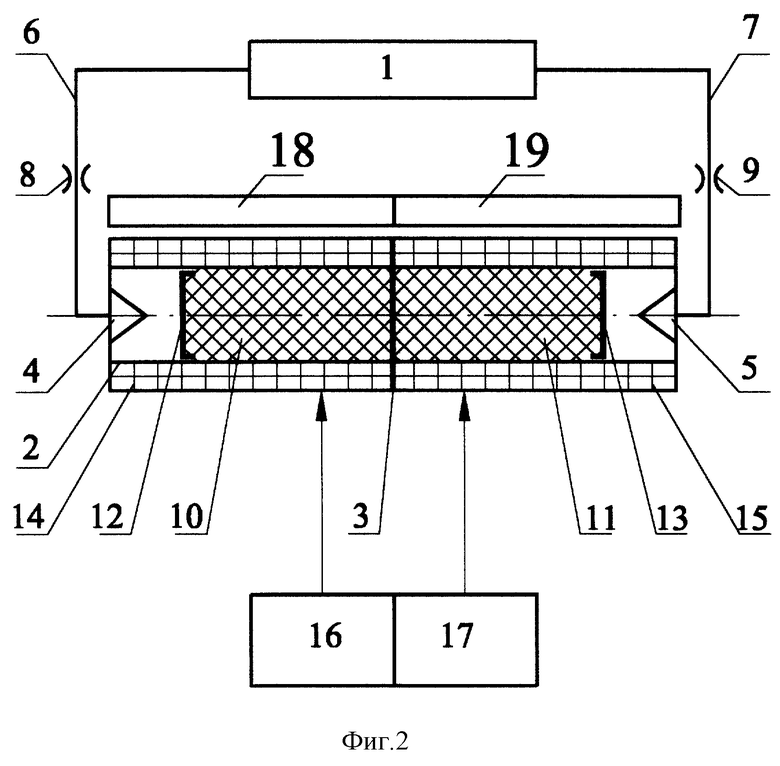
Структурные схемы магнитострикционного электрогидравлического усилителя приведены на фиг. 1 и 2.
Магнитострикционный электрогидравлический усилитель содержит источник 1 рабочей жидкости, цилиндрическую гильзу 2 из немагнитного материала с разделительной перегородкой 3, дифференциальные сопла 4, 5 с линиями 6, 7 подвода рабочей жидкости и постоянными дросселями 8, 9, два паритетных прямолинейных магнитострикционных элемента 10, 11 с заслонками 12, 13 в форме стакана и управляющими обмотками 14, 15, и блок управления, представленный двумя частями 16, 17.
Источник 1 рабочей жидкости через первую и вторую линии 6, 7 подвода рабочей жидкости с постоянными дросселями 8, 9 подключен к дифференциальным соплам 4, 5. Они жестко закреплены по геометрическому центру цилиндрической гильзы 2 из немагнитного материала с разделительной перегородкой 3 на ее торцевых плоскостях. В рабочей плоскости гильзы 2 между дифференциальными соплами 4, 5 установлены паритетные прямолинейные магнитострикционные исполнительные элементы 10, 11, одни концы которых жестко закреплены с разделительной перегородкой 3, а на других - однотипные заслонки 12, 13, выполненные в форме стакана. Поверх цилиндрической гильзы 2 от ее разделительной перегородки 3 по всей рабочей длине закреплены первая и вторая управляющие обмотки 14, 15, имеющие соединения с выводами одноименных частей 16, 17 блока управления усилителя и работающих в противофазе.
Кроме того, в магнитострикционный электрогидравлический усилитель дополнительно введен элемент подмагничивания, состоящий из двух радиальных магнитов 18, 19, закрепленных соосно с первой и второй управляющими обмотками 14, 15.
Магнитострикционный электрогидравлический усилитель работает следующим образом.
В исходном состоянии заслонки 12, 13 усилителя (фиг. 1) находятся в состоянии равновесия и занимают оптимальное положение, при котором сопротивления дифференциальных сопел 4, 5 уравниваются. При подаче токового сигнала управления, который может быть промодулирован высокочастотной составляющей, на одну из управляющих обмоток 14 или 15 с соответствующей части 16 или 17 блока управления устройства, последняя наведет продольное магнитное поле, которое через стенку гильзы 2 воздействует на одноименный прямолинейный (стержневой) магнитострикционный исполнительный элемент 10 или 11, вызывая изменение его первоначальных размеров (эф. Джоуля).
Следует пояснить, что величина и направление (сжатие, растяжение) этих изменений определяется типом магнитострикционного ферромагнетика, т.е. его константами. Например, если ферромагнетик имеет положительный коэффициент магнитострикции +λ, он увеличивает свои размеры на величину этой константы +λ под воздействием магнитного поля H, и наоборот. При снятии поля H - восстанавливает свои размеры. Скорость (быстродействие) подобных изменений физических размеров определяется структурой магнетика, и соизмерима со скоростью Vпр продольной магнитострикционной волны в его среде. Так, для большинства ферромагнетиков инварной и элинварной групп эта величина составляет Vпр = (4,8 ÷ 5,0)•103 м/с. В предлагаемом устройстве элементы 10, 11 выполнены с использованием сплава 49КФ2 ( λ = +70 • 10-6) и композитного материала на основе опилок сплава 49КФ2 с эластичным наполнителем ( λ*≈ +15•10-3 ) - резиной.
В результате одноименная заслонка 12 или 13 изменяет свое равновесное состояние под воздействием магнитострикционного исполнительного элемента 10 или 11, и меняет сопротивление соответствующего сопла 4 или 5. Возникает диагональный перекос давления в мостовой схеме усилителя, что позволяет управлять золотниковым распределителем устройства (на фиг. 1 не показано) с заданными точностью и быстродействием. При снятии управляющего сигнала магнитострикционный исполнительный элемент 10 или 11 восстанавливает свои первоначальные размеры со скоростью магнитной волны.
Формирование противофазных сигналов частями 16, 17 блока управления позволяет управлять мостовой схемой усилителя с требуемой точностью и быстродействием по заданному алгоритму. А использование модулированных по высокой частоте управляющих сигналов - устранить эффект облитерации в процессе работы устройства, стабилизировав его технические параметры во времени. Для уменьшения взаимовлияния магнитных полей управляющие обмотки 14, 15 имеют торцевое экранирование в зоне перегородки 3 усилителя.
Основным недостатком магнитострикционного электрогидравлического усилителя по фиг. 1 является недостаточная эффективность его дифференциального привода (10 - 15), обусловленная нелинейностью начального участка кривой намагничивания ферромагнетиков (10, 11) [см., например С.В. Вонсовский. Магнетизм. - М.: Наука, 1984. - с. 147, рис. 75]. Для установления рабочей точки магнитострикционных исполнительных элементов 10, 11 на линейном участке кривой намагничивания магнитострикционный электрогидравлический усилитель (фиг. 2) дополнительно снабжен элементом подмагничивания, представленный двумя частями 18 и 19 радиального постоянного магнита для удобства индивидуальной настройки каждого магнита из приводов усилителя. Эти части 18, 19 постоянного магнита закреплены на гильзе 2 усилителя соосно и поверх управляющих обмоток 14, 15. В целом работа усилителя на фиг. 2 не отличается от работы усилителя по фиг. 1.
Таким образом, использование прямого управления псевдоподвижных прямолинейных магнитострикционных исполнительных элементов 10, 11, включенных дифференциально по геометрической оси сопел 4, 5, позволяет линеаризовать рабочую характеристику предлагаемого усилителя, сделав его высокоточным и чувствительным регулирующим прибором. Выполнение его с псевдоподвижными элементами (10, 11, 12, 13) позволяет исключить составляющую погрешность механического люфта. Другая составляющая погрешности - температурная, может быть сведена практически к нулю, если формировать управляющие сигналы (блоки 16, 17) по закону изменения температуры окружающей среды, например по значениям датчика температуры. Быстродействие магнитострикционного электрогидравлического усилителя определяется скорость перемагничивания (скорость магнитной волны) его исполнительных элементов 10, 11. Кроме того, простота конструкции устройства повышает надежность, технологичность, снижает стоимость изготовления. Это существенно отличает его от прототипа и обеспечивает достижение положительного эффекта.
Техническая реализация: элементы 1 - типовой элемент гидрокопировальных металлорежущих станков и станков с ЧПУ; элементы 2, 3, 4, 5, 8, 9 - бронза Бр 2; исполнительные элементы 10, 11 - сплав 49КФ2 диаметром 8 мм, длиной 200 мм; композитный материал на базе опилок 49КФ2 с резиновым наполнителем; элементы 12, 13 - дюраль Д16; элементы 14, 15 - катушки индуктивности; элементы 16, 17 - управляемые источники тока (КТС 613, КТ 315, КТ 817, КС 133А, RC - элементы); элементы 18, 19 - пакет кольцевых магнитов из феррита ЮДНК24Б.
Источники информации
1. А. с. N 1015128 СССР, МКИ F 15 В 3/00. Электрогидравлический усилитель. БИ 16 - 83.
2. А. с. N 1285220 СССР, МКИ F 15 В 3/00. Электрогидравлический преобразователь. БИ 3 - 87, прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТОСТРИКЦИОННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 2005 |
|
RU2293888C1 |
| МНОГОПЛЕЧЕВОЙ МАГНИТОСТРИКЦИОННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 2007 |
|
RU2335662C1 |
| МАГНИТОСТРИКЦИОННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ С ПРОПОРЦИОНАЛЬНЫМ УПРАВЛЕНИЕМ | 2006 |
|
RU2324844C2 |
| МАГНИТОСТРИКЦИОННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 1999 |
|
RU2170370C1 |
| РЫЧАЖНЫЙ МАГНИТОСТРИКЦИОННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ ПРЯМОГО УПРАВЛЕНИЯ | 2007 |
|
RU2338933C1 |
| МАГНИТОСТРИКЦИОННЫЙ ДИФФЕРЕНЦИАЛЬНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 2000 |
|
RU2176753C1 |
| МАГНИТОСТРИКЦИОННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 2005 |
|
RU2300672C2 |
| РЫЧАЖНЫЙ МАГНИТОСТРИКЦИОННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 2007 |
|
RU2338934C1 |
| МАГНИТОСТРИКЦИОННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 2007 |
|
RU2339851C1 |
| МАГНИТОСТРИКЦИОННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 2007 |
|
RU2339852C1 |
Изобретение предназначено для управления гидравлическими исполнительными механизмами различных машин. Усилитель состоит из источника рабочей жидкости 1, гильзы из немагнитного материала 2, разделительной перегородки 3, двух сопел 4, 5, линий подвода рабочей жидкости 6, 7, постоянных дросселей 8, 9, магнитострикционных исполнительных элементов 10, 11 с заслонками в форме стакана 12, 13, управляющих обмоток 14, 15 и двух частей блока управления 16, 17. Технический результат: повышение точности и надежности. 1 з.п. ф-лы, 2 ил.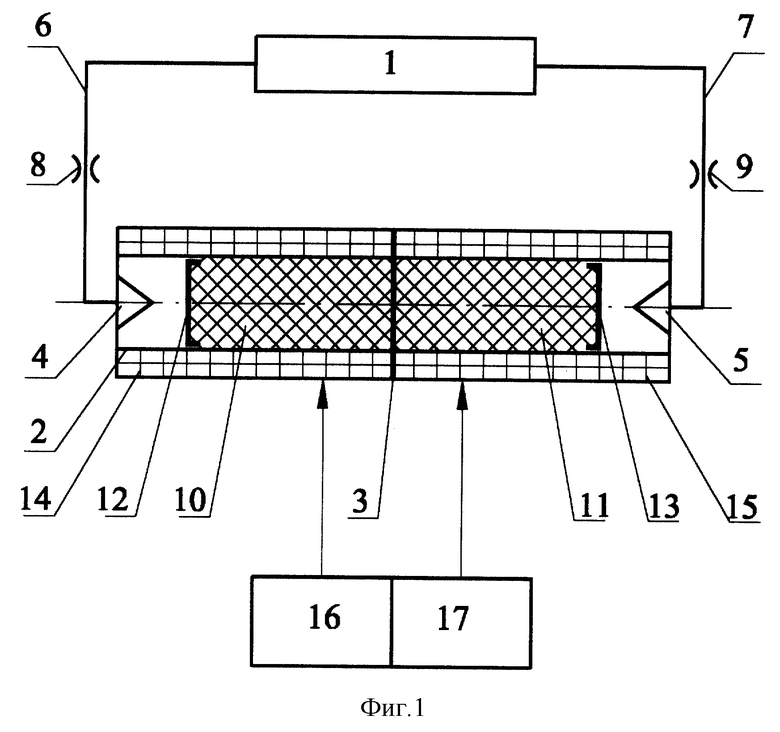
| Электрогидравлический преобразователь | 1985 |
|
SU1285220A1 |
| Электрогидравлический усилитель | 1981 |
|
SU1015128A1 |
| Электрогидравлический усилитель | 1987 |
|
SU1476206A1 |
| Электрогидравлический усилитель | 1990 |
|
SU1710864A1 |
| Электрогидравлический усилитель-пРЕОбРАзОВАТЕль | 1978 |
|
SU821761A1 |
