Изобретение относится к системам автоматического регулирования и может быть использовано в системах управления различными инерционными объектами, для стабилизации фазовых координат различных динамических объектов с помощью релейных регуляторов.
Основное применение релейного регулятора - использование в системах управления космическими аппаратами (КА) в режимах их ориентации и угловой стабилизации, требующих высокоточного поддержания регулируемых параметров (позиционного отклонения и скорости изменения позиционного отклонения), например в режимах сближения (стыковка, подлеты, облеты и т.д.).
Релейные регуляторы, предназначенные для указанных выше применений, имеют, как правило, заданные законы управления, зоны нечувствительности (или пороги срабатывания) по каждой регулируемой фазовой координате.
Известен релейный регулятор [1], содержащий сумматор, релейный элемент, охваченный интегрирующей отрицательной обратной связи, формирователь импульсов, а также схема изменения порогов зоны нечувствительности в соответствии с ошибкой управления определенной фазовой координаты. В частности, при выходе скорости изменения ошибки управления за заданные пределы зона нечувствительности релейного регулятора настраивается на допустимое значение по данному параметру.
Недостатком указанного устройства является его относительная сложность, а также ограниченный рабочий диапазон, определяемый линейной (информационной) зоной датчика позиционного отклонения.
Наиболее близким аналогом к предлагаемому решению является релейный регулятор [2], содержащий последовательно соединенные шину входного сигнала по ошибке управления, сравнивающее устройство, усилитель с ограничением, сумматор и интегратор, релейный элемент и формирователь релейного сигнала с задержкой на выключение. Выход интегратора соединен с инвертирующим входом сравнивающего устройства, а выход релейного элемента - с инвертирующим входом сумматора.
Недостатком указанного устройства является невысокое быстродействие при отработке быстрых изменений сигналов позиционного отклонения, что приводит к значительным перерегулированиям в системах управления, использующих устройство, при воздействии на объект управления внешних возмущений.
Задача предлагаемого изобретения - увеличение быстродействия релейного регулятора при отработке быстрых изменений сигналов позиционного отклонения, возникающих при воздействии внешних возмущений на объект управления, и увеличение быстродействия при отработке начальных рассогласований по регулируемым параметрам.
Сущность предлагаемого изобретения состоит в том, что релейный регулятор, содержащий последовательно соединенные шину входного сигнала по ошибке управления, сравнивающее устройство, усилитель с ограничением, сумматор, второй вход которого соединен с шиной входного сигнала по скорости ошибки управления, и интегратор, охваченный цепью отрицательной обратной связи через сравнивающее устройство, а также последовательно соединенные трехпозиционный релейный элемент, выход которого соединен с инвертирующим входом сумматора, и формирователь релейного сигнала с задержкой на выключение, дополнительно содержит второй сумматор, включенный между выходом интегратора и входом трехпозиционного релейного элемента, звено "усилитель с зоной нечувствительности", вход которого соединен с шиной входного сигнала по скорости ошибки управления, а выход соединен с четвертым входом сумматора, трехпозиционный гистерезисный релейный элемент, вход которого соединен с входом звена "усилитель с зоной нечувствительности", двухпозиционный релейный элемент, вход которого соединен с шиной входного сигнала по ошибке управления, и логическую схему И, входы которой соединены с выходами двухпозиционного и гистерезисного трехпозиционного релейных элементов, а ее выход соединен со вторым входом второго сумматора.
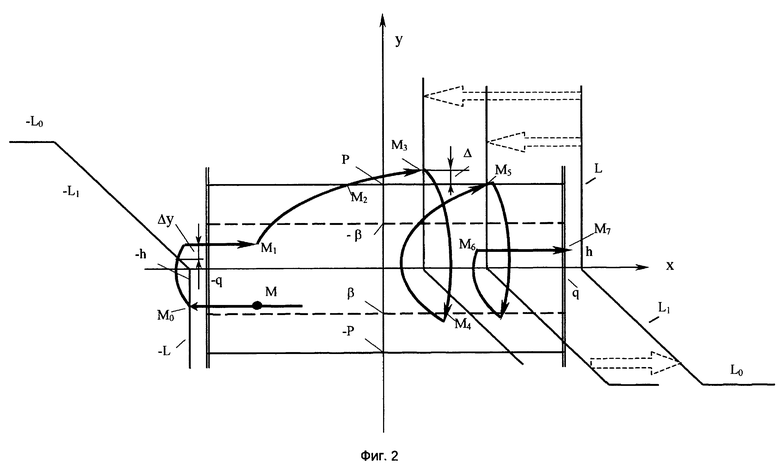
На фиг. 1 представлена структурная схема системы управления, в состав которой входит заявляемый релейный регулятор. На фиг. 2 показан пример фазового портрета системы управления (фиг. 1).
На фиг. 1 показано:
1 - релейный регулятор, в состав которого входят:
2 - шина входного сигнала по ошибке управления (далее по тексту - шина 2):
3 - шина входного сигнала по скорости ошибки управления (далее по тексту - шина 3);
4 - сравнивающее устройство;
5 - усилитель с ограничением (далее по тексту - усилитель 5);
6, 8 - сумматоры (далее по тексту - сумматор 6, сумматор 8):
7 - интегратор;
9 - трехпозиционный релейный элемент (РЭ 9):
10 - формирователь релейного сигнала с задержкой на выключение (далее по тексту - формирователь 10):
11 - выходная шина;
12 - звено "усилитель с зоной нечувствительности" (звено 12);
13 - трехпозиционный гистерезисный релейный элемент (РЭ 13);
14 - двухпозиционный релейный элемент (РЭ 14);
15 - логическая схема И;
16 - объект управления;
17 - измеритель ошибки управления (далее по тексту "измеритель 17");
18 - измеритель скорости ошибки управления (далее по тексту "измеритель 18").
Релейный регулятор выполнен следующим образом.
Блоки 4-10 соединены последовательно, при этом неинвертирующий вход сравнивающего устройства 4 соединен с шиной 2 (вход устройства по ошибке управления), а выход формирователя 10 является выходом релейного регулятора (шина 11). Блоки 5 - 7 охвачены цепью отрицательной обратной связи за счет соединения выхода интегратора 7 с инвертирующим входом блока 4. Блоки 7 - 9 охвачены цепью отрицательной обратной связи путем соединения выхода релейного элемента 9 с инвертирующим входом сумматора 6, с двумя неинвертирующими входами которого соединены шина 3 и выход звена 12. Со вторым входом сумматора 8 соединены через схему И 15 выходы РЭ 13 и РЭ 14, входы которых соответственно соединены с шинами 3 и 2. Шина 3 также соединена с входом звена 12.
Выходы измерителей 17 и 18 фазовых координат объекта управления 16 соединены соответственно с шинами 2 и 3 релейного регулятора 1.
Ниже приводится описание работы заявляемого устройства в предположении, что объект управления описывается выражением (1). Указанное выражение соответствует, в частности, движению космического аппарата вокруг или вдоль одной его оси.
где x и y - измеряемые фазовые координаты, z, zB - сигналы управления и возмущения, действующие на объект управления.
Регулятор 1 описывается следующим образом.
s = s1+kd•d (2)
где a, m, s, s1, d, Up, а также b, с, d в выражениях (6), (7), (8) - сигналы в соответствии со структурной схемой (фиг. 1) релейного регулятора, kd - коэффициент передачи сигнала d, k - коэффициент обратной связи по сигналу Up.
N = x-s1,
N0 - граница линейной зоны (по абсолютной величине) усилителя 5,
mmax - уровень ограничения (по абсолютной величине) усилителя 5,
p - границы зон нечувствительности (по абсолютной величине) блоков 12 и 13,
ka - коэффициент передачи звена 12 в линейной части его характеристики,
β - значение гистерезиса РЭ 13,
q - граница зоны нечувствительности (абсолютное значение) РЭ 14, d = b& c, (8)
h - граница зоны нечувствительности (абсолютное значение) РЭ 14,
z = Φ(τ)•Up (10)
(что означает преобразование релейного сигнала Up длительности tUp в релейный сигнал z длительности tz).
Рассмотрим функционирование релейного регулятора 1 в системе управления (фиг. 1), используя пример ее фазового портрета (фиг.2).
Пусть в некоторый момент изображающая точка М (с текущими координатами x и y, измеряемыми, соответственно, измерителями 17 и 18) попадает на линию включения - L (точка М0), положение которой на фазовом портрете определяет значение h границы зоны нечувствительности РЭ 9. (Это следует из выражений 1, б и 3 и из условий того, что если а=0, d=0, а сигнал N находится в линейной зоне усилителя 5, то:  и, следовательно, s1=x.). При s1 ≥ h включается РЭ 9, одновременно срабатывает формирователь 10, выходной сигнал z которого является выходом релейного регулятора. (Формирователь 10 представляет собой релейный элемент с задержкой на выключение: срабатывание формирователя 10 происходит одновременно со срабатыванием РЭ 9, а выключение - через время τ после выключения РЭ 9. Подробное функционирование формирователя 10 дано в описании прототипа). Выключению РЭ 9 соответствует точка пересечения линии выключения -L-1, после чего через время τ сигнал z становится равным нулю. Фактическое приращение скорости за счет действия Δy = τz
и, следовательно, s1=x.). При s1 ≥ h включается РЭ 9, одновременно срабатывает формирователь 10, выходной сигнал z которого является выходом релейного регулятора. (Формирователь 10 представляет собой релейный элемент с задержкой на выключение: срабатывание формирователя 10 происходит одновременно со срабатыванием РЭ 9, а выключение - через время τ после выключения РЭ 9. Подробное функционирование формирователя 10 дано в описании прототипа). Выключению РЭ 9 соответствует точка пересечения линии выключения -L-1, после чего через время τ сигнал z становится равным нулю. Фактическое приращение скорости за счет действия Δy = τz
Если на объект управления начинает действовать внешнее возмущение zB (точка M1), то, в соответствии с (1), сигнал y в некоторый момент становится больше значения p границ зон нечувствительности блоков 12 и 13 (точка М2 на линии p). Если изображающая точка М находится в пределах - q < x < q, т.е. в области включения РЭ 14 (как это показано на фиг.2), то при совместном действии ненулевых сигналов b и C на выходе схемы И 15 появляется сигнал d, соответствующий сигналу b. (Блок 15 в простейшем случае представляет собой ключ, на управляющий вход которого подается сигнал C, а на сигнальный вход подается сигнал b, сигнал d является выходом ключа). В этом случае РЭ 9 включается при s1 ≥ h - kd • d, что означает "смещение" линии включения L, например, в положение L2 (точка М3). Если в процессе управления изображающая точка пересекает границу β (участок М3 - М4), что соответствует: а) уменьшению сигнала y до уровня -p < y < β, б) приведению в исходное состояние РЭ 13 и в) установке в исходное состояние линии включения L.
Далее процесс может повторяться, если действует внешнее возмущение, или быть иным, если, например, в т. M6 возмущение исчезает. В последнем случае изображающая точка стремится к начальной линии включения L через границу q (точка М7).
Параметры структурных элементов регулятора 1 связаны с его динамическими характеристиками и характеристиками системы управления в целом следующим образом (т. к. положение линий переключения симметрично началу координат фазового портрета, рассматривается только его правая полуплоскость).
Начальные положения линий включения соответствуют зоне нечувствительности РЭ 9, т.е. (фиг. 2).
L: x = h.
Линии выключения определяются параметрами усилителя 5 и, как следует из выражений (2) - (5) при а=0 и d=0
s = s1.
При попадании изображающей точки в область выключения в регуляторе возникает скользящий режим [3], для которого характерно переключение РЭ 9 с частотой, намного превышающей частоты процесса управления динамического объекта. В скользящем режиме  , s = h. В процессе движения от линии L до линии L1 или L0 среднее значение "Up" сигнала Up от 1 до 0. Условие Up=0 означает переход линии выключения L1 или L0.
, s = h. В процессе движения от линии L до линии L1 или L0 среднее значение "Up" сигнала Up от 1 до 0. Условие Up=0 означает переход линии выключения L1 или L0.
Исходя из указанного
L1: y=Km(h-x),
L0: y=-mmax
Параметры p и β определяют значение сигналов у при которых возникает и устраняется эффект смещения линий переключения. От значения гистерезиса β в значительной степени зависит характер установившегося процесса в системе управления при действии внешних возмущений: с увеличением гистерезиса увеличивается амплитуда колебаний (например, участок М3-М4-М5), но при этом уменьшается или становится нулевым среднее значение координаты y. Расчеты и моделирование показывают, что значение гистерезиса при действии внешних возмущений, составляющих 5 - 50% от управляющего воздействия, предпочтительно выбирать в пределах 1.8p > β > p. При этом во всех случаях, если необходимо избегать перерегулирований по координате у, должно выполняться условие β > 2p-τz.
Выбором наклона характеристики (ka) звена 12 достигаются требуемые значения начального перерегулирования Δ (фиг.2). Характерные значения -2 < ka < 10. При других значениях влияние наклона характеристики звена 12 малозначительно.
Рассматриваемая схема релейного регулятора позволяет расширить его быстродействие за счет увеличения влияния скоростной компоненты ошибки управления, что достигается введением группы элементов (12-15): звено "усилитель с зоной нечувствительности", трехпозиционный гистерезисный релейный элемент, двухпозиционный релейный элемент, логическая схема И, через которые указанный скоростной сигнал корректирует зону нечувствительности по сигналу ошибки управления отклонения.
Предлагаемая совокупность признаков в рассмотренных автором решениях не встречалась и не следует явным образом из уровня техники, что позволяет сделать вывод о соответствии технического решения критериям "новизна" и "изобретательский уровень".
В качестве элементов для реализации релейного регулятора используются типовые схемы: релейные элементы, интегратор, сумматоры, нелинейные элементы, формирователь с задержкой на выключение.
Источники информации
1. Авторское свидетельство СССР N 1695263, G 05 В 13/02, 1991 г.
2. Патент РФ N 1798764, G 05 В 11/14, 1992 г. (прототип).
3. Уткин В.И. Скользящие режимы и их применения в системах с переменной структурой. "Наука", 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2403607C2 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2010 |
|
RU2447474C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2010 |
|
RU2441265C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2000 |
|
RU2179736C2 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2396586C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2385480C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ УПРАВЛЯЮЩИХ ВОЗДЕЙСТВИЙ | 1998 |
|
RU2158951C2 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2002 |
|
RU2223528C2 |
| Релейный регулятор | 1989 |
|
SU1695263A1 |
| ПРЕЦИЗИОННЫЙ ЧАСТОТНО-ИМПУЛЬСНЫЙ ИЗМЕРИТЕЛЬ | 2001 |
|
RU2208797C1 |
Изобретение относится к системам автоматического регулирования и может быть использовано в системах управления различными инерционными объектами, для стабилизации фазовых координат различных динамических объектов с помощью релейных регуляторов. Технический результат изобретения заключается в повышении быстродействия релейного регулятора. В основе изобретения лежит изменение зоны нечувствительности основного релейного элемента, формирующего выходной сигнал релейного регулятора, по сигналу ошибки управления. Изменение указанной зоны нечувствительности производится по сигналу скорости ошибки управления вне заданного ее предела. При этом производится форсирование изменения сигнала, включающего основной релейный элемент. Реализация изобретения осуществляется введением группы элементов, анализирующих сигналы ошибки и скорости ошибки управления и обеспечивающих изменение порогов срабатывания основного релейного элемента при действии внешних возмущений. 2 ил.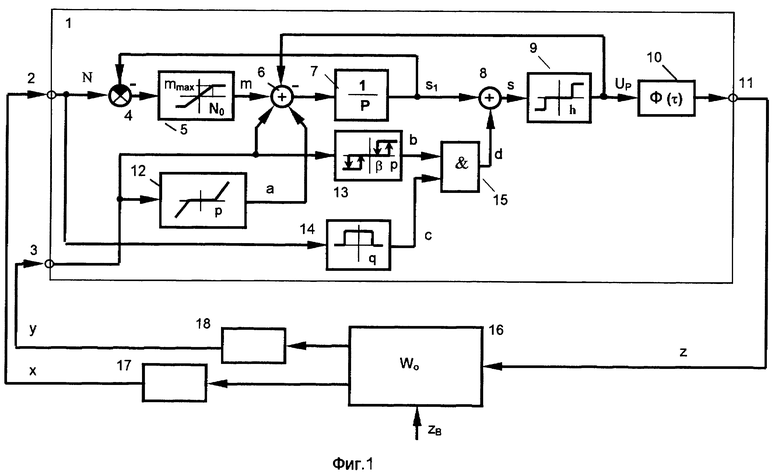
Релейный регулятор, содержащий последовательно соединенные шину входного сигнала по ошибке управления, сравнивающее устройство, усилитель с ограничением, сумматор, второй вход которого соединен с шиной входного сигнала по скорости ошибки управления, и интегратор, охваченный цепью отрицательной обратной связи через сравнивающее устройство, а также последовательно соединенные трехпозиционный релейный элемент, выход которого соединен с инвертирующим входом сумматора, и формирователь релейного сигнала с задержкой на выключение, отличающийся тем, что он дополнительно содержит второй сумматор, включенный между выходом интегратора и входом трехпозиционного релейного элемента, звено "усилитель с зоной нечувствительности", вход которого соединен с шиной входного сигнала по скорости ошибки управления, а выход соединен с четвертым входом сумматора, трехпозиционный гистерезисный релейный элемент, вход которого соединен с входом звена "усилитель с зоной нечувствительности", двухпозиционный релейный элемент, вход которого соединен с шиной входного сигнала по ошибке управления, и логическую схему И, входы которой соединены с выходами двухпозиционного и трехпозиционного гистерезисного релейных элементов, а ее выход соединен со вторым входом второго сумматора.
| Система стабилизации | 1989 |
|
SU1798764A1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1997 |
|
RU2115150C1 |
| Релейный регулятор | 1989 |
|
SU1695263A1 |
| РАЗЖИМНАЯ ОПРАВКА | 1992 |
|
RU2047423C1 |
| Уткин В.И | |||
| скользящие режимы и их применение в системах с переменной структурой | |||
| - М,: Наука, 1974, с | |||
| Крутильный аппарат | 1922 |
|
SU233A1 |

