Изобретение относится к автоматике и может быть использовано в резервированных системах управления различными инерционными объектами, например поворотными платформами, промышленными роботами, летательными аппаратами.
Известен релейный регулятор [1], содержащий последовательно соединенные шину сигнала позиционного отклонения, первое сравнивающее устройство, усилитель с ограничением, сумматор, интегратор, второе сравнивающее устройство, первый релейный элемент и формирователь релейного сигнала с задержкой на выключение и последовательно соединенные второй релейный элемент и второй интегратор с ограничением, выход которого подключен к инвертирующему входу второго сравнивающего устройства.
Недостаток этого регулятора состоит в том, что он не обеспечивает требуемого быстродействия и заданных энергозатрат (расходов рабочего тела) в переходных режимах.
Наиболее близким техническим решением к предлагаемому является релейный регулятор [2], содержащий устройство формирования оптимального смещения линий переключения регулятора и последовательно соединенные шину сигнала позиционного отклонения, первое сравнивающее устройство, усилитель с ограничением, сумматор, интегратор, второе сравнивающее устройство, первый релейный элемент и формирователь релейного сигнала с задержкой на выключение, и последовательно соединенные второй релейный элемент и интегратор с ограничением, выход которого подключен к инвертирующему входу второго сравнивающего устройства, выход которого соединен с входом второго релейного элемента, при этом выход интегратора соединен с инвертирующим входом первого сравнивающего устройства и первым входом устройства формирования оптимального смещения линий переключения регулятора, второй вход которого соединен с шиной сигнала скорости изменения позиционного отклонения и вторым неинвертирующим входом сумматора, а выход устройства формирования оптимального смещения линий переключения регулятора соединен со вторым неинвертирующим входом второго сравнивающего устройства.
Недостаток этого устройства состоит в том, что оно не обеспечивает заданной надежности функционирования, так как при любом единичном отказе это устройство перестает выполнять свои функции.
Задача изобретения - повышение надежности.
Эта задача решается тем, что в релейный регулятор, содержащий устройство формирования оптимального смещения линий переключения регулятора и последовательно соединенные шину сигнала позиционного отклонения, первое сравнивающее устройство, усилитель с ограничением, сумматор, интегратор, второе сравнивающее устройство, первый релейный элемент и формирователь релейного сигнала с задержкой на выключение и последовательно соединенные второй релейный элемент и интегратор с ограничением, выход которого подключен к инвертирующему входу второго сравнивающего устройства, выход которого соединен с входом второго релейного элемента, при этом выход интегратора соединен с инвертирующим входом первого сравнивающего устройства и первым входом устройства формирования оптимального смещения линий переключения регулятора, второй вход которого соединен с шиной сигнала скорости изменения позиционного отклонения и вторым неинвертирующим входом сумматора, а выход устройства формирования оптимального смещения линий переключения регулятора соединен со вторым неинвертирующим входом второго сравнивающего устройства, дополнительно введены 2m (m=1, 2, …) аналогичных регуляторов, каждый из которых дополнительно содержит мажоритарное устройство, ключ и схему выделения модуля, при этом выход мажоритарного устройства соединен с шиной выходного сигнала, с третьим входом устройства формирования оптимального смещения линий переключения регулятора и входом схемы выделения модуля, выход которой соединен с управляющим входом ключа, выход которого соединен с инвертирующим входом сумматора, а сигнальный вход ключа соединен с выходом первого релейного элемента, выход формирователя релейного сигнала с задержкой на выключение соединен с первым входом мажоритарного устройства и соответствующими входами мажоритарного устройства других каналов.
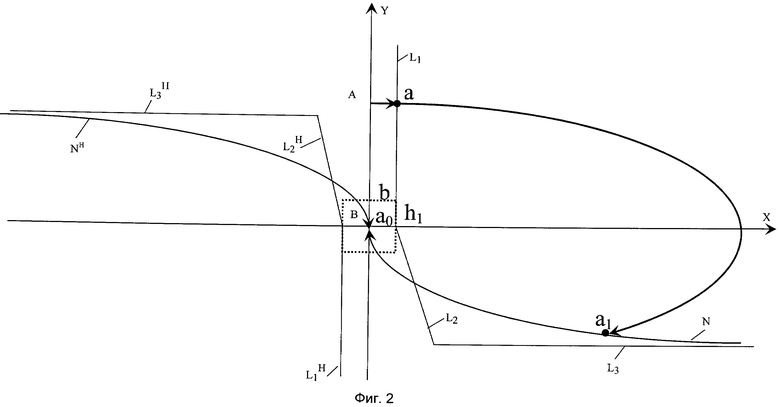
На фиг.1 приведена блок-схема релейного регулятора, на фиг.2 приведены фазовые траектории системы.
На схеме фиг.1: 1 - первое сравнивающее устройство, 2 - усилитель с ограничением, 3 - сумматор, 4 - интегратор, 5 - первый релейный элемент, 6 - формирователь релейного сигнала с задержкой на выключение, 7 - второе сравнивающее устройство, 8 - второй релейный элемент, 9 - интегратор с ограничением, 10 - шина сигнала позиционного отклонения, 11 - шина сигнала скорости изменения позиционного отклонения, 12 - объект управления (в состав регулятора не входит; он показан для полноты описания технического результата от применения заявленного устройства), 13 - устройство формирования оптимального смещения линий переключения регулятора, 14 - ключ, 15 - мажоритарное устройство, 16 - шина выходного сигнала, 17 - схема выделения модуля, 18 - первый канал, 19 - второй канал, 20 - (2m+1)-й канал.
На фиг.2: L, LH, L1, L2, L3, LH 1, LH 2, LH 3 - линии переключения, N, NH - фазовые траектории, A, a1, a0 - изображающие точки фазовой траектории.
В релейном регуляторе (фиг.1) в каждом канале последовательно соединены шина сигнала позиционного отклонения 10, первое сравнивающее устройство 1, усилитель с ограничением 2, сумматор 3, интегратор 4, второе сравнивающее устройство 7, первый релейный элемент 5 и формирователь релейного сигнала с задержкой на выключение 6, выход которого соединен с входом мажоритарного устройства 15 и с соответствующими входами мажоритарного устройства 15 других каналов, выход мажоритарного устройства 15 соединен с шиной выходного сигнала 16, с третьим входом устройства формирования оптимального смещения линий переключения регулятора 13 и входом схемы выделения модуля 17, выход которой соединен с входом управления ключа 14. Выход второго релейного элемента 8 соединен с входом интегратора с ограничением 9, выход которого подключен к инвертирующему входу второго сравнивающего устройства 7. Выход интегратора 4 соединен с инвертирующим входом первого сравнивающего устройства 1 и первым входом устройства формирования оптимального смещения линий переключения регулятора 13. Выход первого релейного элемента 5 соединен с сигнальным входом ключа 14, выход которого соединен с инвертирующим входом сумматора 3. Выход второго сравнивающего устройства 7 соединен с входом второго релейного элемента 8. Шина сигнала скорости изменения позиционного отклонения 11 соединена со вторым неинвертирующим входом сумматора 3 и вторым входом устройства формирования оптимального смещения линий переключения регулятора 13, выход которого соединен со вторым неинвертирующим входом второго сравнивающего устройства 7.
Рассмотрим работу релейного регулятора на примере управления ориентацией космического аппарата. Пусть на вход релейного регулятора каждого канала поступают сигнал Х (шина 10) углового (позиционного) отклонения космического аппарата и сигнал Y (шина 11) скорости изменения углового отклонения (угловой скорости). Задача релейного регулятора - так формировать выходной сигнал My (выходной сигнал мажоритарного устройства 15), чтобы свести сигналы Х и Y в область устойчивого состояния В=>Х∈(-h, +h), Y∈(-b, b), где значения ±h определяют зону нечувствительности релейного регулятора, значения ±b определяют допустимые значения угловой скорости в установившемся состоянии (зону нечувствительности релейного регулятора по угловой скорости), см. фиг.2.
Релейный регулятор в системе управления описывается следующими соотношениями


где My, MB - управляющий и возмущающий моменты соответственно.
Далее по тексту: Ui (i=1, 2, ….) - переменные состояния релейного регулятора (выходные сигналы функциональных блоков с позиционным обозначением i).


где Ui m - фиксированные значения переменных Ui (m - любой индекс). Здесь и далее по тексту: Ki - коэффициенты передачи переменных Ui.
В частности, U2 + и U2 - - значения уровней ограничения усилителя 2. Указанные значения определяют положение линий выключения L3 и LH 3 на фазовой плоскости фиг.2. Значение K2 определяет наклон линий выключения L2 и LH 2.




Здесь и далее по тексту: hi, b, τ - параметры регулятора.





(что означает преобразование релейного сигнала U5 длительностью t5 в релейный сигнал U6 длительностью t6).

где функция MU означает мажоритарный выбор значения большинства (m+1) функций U6 из возможного числа значений (2m+1).
Применительно к воздействию на объект управления 12 выходной сигнал мажоритарного устройства 15 [4] U15 является управляющим моментом My. Законы формирования выходного сигнала My релейного регулятора, позволяющие привести в область устойчивого состояния В координаты Х и Y, определяются выражениями (3)-(14).
Остановимся на характеристиках некоторых элементов блок-схемы. Интегратор с ограничением 9 имеет выходной сигнал U9, ограниченный величиной ±h2 (|h2+h1|=h соответствует зоне нечувствительности релейного регулятора). Уровень срабатывания первого релейного элемента 5±h1 выбирается значительно меньше величины ±h, что позволяет существенно снизить динамические ошибки при действии возмущающих моментов. Уровень выходного сигнала второго релейного элемента 8 выбирается равным ±b (соответствует допустимому значению угловой скорости в установившемся состоянии).
Рассмотрим работу релейного регулятора, предполагая вначале, что выходной сигнал устройства формирования оптимального смещения линий переключения регулятора 13 U13=0. Пусть сигнал Х увеличивается от нуля со скоростью Y<b. В этом случае выходной сигнал U4 интегратора 4 равен сигналу X, что обеспечивается структурой контура, образованного первым сравнивающим устройством 1, усилителем с ограничением 2, сумматором 3 и интегратором 4, а выходной сигнал U7 второго сравнивающего устройства 7 равен нулю, так как выходной сигнал U8 второго релейного элемента 8 обеспечивает точное слежение выходного сигнала U9 интегратора с ограничением 9 за выходным сигналом U4 интегратора 4 в соответствии с равенствами


где U0 соответствует U7=0.
В рассматриваемом случае в соответствии с (16) сигнал U7=0 и первый релейный элемент 5 выключен, то есть условия (16) соответствуют режиму установившегося состояния, для которого координаты X, Y∈В.
Пусть теперь сигнал Х увеличивается от нуля со скоростью Y>b. В этом случае условия (16) не выполняются, сигнал U7≠0 и при достижении сигналом U7 значения h1 включается первый релейный элемент 5, формируя выходной сигнал U5, который поступает на вход формирователя 6 и через ключ 14 на инвертирующий вход сумматора 3. Выходной сигнал формирователя 6 подается на вход мажоритарного устройства 16, выходной сигнал My которого является выходным сигналом регулятора и используется для включения исполнительных двигателей. В исправно работающем регуляторе (исправны все каналы) включение первого релейного элемента 5 всех каналов происходит практически одновременно, и можно считать, что в соответствии с (5) и (14) сигнал U14=U5. Формирователь 6 представляет собой релейный элемент с задержкой на выключение: срабатывание формирователя 6 происходит одновременно со срабатыванием первого релейного элемента 5, а выключение - через время τ после выключения первого релейного элемента 5. С момента срабатывания первого релейного элемента 5 в контуре первое сравнивающее устройство 1, усилитель с ограничением 2, сумматор 3, интегратор 4, второе сравнивающее устройство 7, первый релейный элемент 5 возникает "скользящий режим" [3], для которого характерно переключение первого релейного элемента 5 с частотой fp, определяемой скоростью изменения сигнала Х (угловой скоростью Y). Если fp.>1/τ, то выходной сигнал My регулятора непрерывен. Если fp.<1/τ, то выходной сигнал My регулятора - релейно-импульсный, частоты fp и длительности τ. Включение формирователя 6 и мажоритарного устройства 15 обеспечивает приведение координат X, Y в область устойчивого состояния В. Выбором наклона и ограничения выходной характеристики усилителя 2 достигаются требуемые параметры линий переключения релейного регулятора, аналогичные параметрам известного решения
[2]. Уравнения линий переключения (фиг.2) имеют вид:



Рассмотрим работу релейного регулятора при U13≠0. Пусть, например, U13=UK. В этом случае релейный регулятор будет формировать сигнал My таким образом, чтобы свести к нулю сигнал U7. Тогда сигнал Х будет равен -UK, что соответствует смещению оси Y и всех линий переключения на фазовой плоскости фиг.3 на величину -UK.
Устройство формирования оптимального смещения линий переключения регулятора [2] формирует выходной сигнал U13 в соответствии с выражениями (20)-(24)




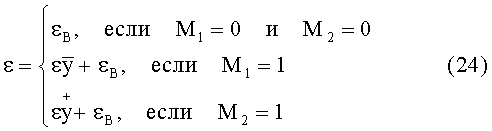
где εB - угловое ускорение от возмущающего момента MB, ε+ y - угловое ускорение при включении двигателя My=U+=1, и ε- y - угловое ускорение при включении двигателя My=U-=-1.
Рассмотрим работу релейного регулятора в этом случае. В соответствии со схемой фиг.1 сигнал смещения U13 формируется при нахождении изображающей точки А (фиг.2) во втором или четвертом квадрантах, а при нахождении изображающей точки в первом или в третьем квадрантах сигнал U13=0 [2]. Как следует из приведенного выше описания, сигнал U13 производит смещение линий переключения (18) в направлении оси Х на величину -U13. Если изображающая точка А при своем движении по фазовой траектории пересекает линии N (NH), например, в точке a1 с координатами (X1, Y1), то в этой точке выходной сигнал устройства формирования оптимального смещения линий переключения регулятора 13 U13=-X1. Линии N и NH имеют вид


При движении изображающей точки во втором или четвертом квадрантах включение (переключение) исполнительного двигателя будет происходить на линии N или NH [2]. При включении двигателя в точке a1 (фиг.2) сигнал U13 будет изменяться в соответствии с (20), что приводит к непрерывному включению двигателя, и изображающая точка будет двигаться по траектории N в область устойчивого состояния В. Траектория N (NH) является траекторией оптимального движения по быстродействию изображающей точки в область устойчивого состояния В. Устройство формирования оптимального смещения линий переключения регулятора 13 обеспечивает выход изображающей точки на оптимальную траекторию N (NH).
Рассмотрим работу релейного регулятора в случае отказа какого-либо элемента в одном из каналов. Для простоты будем рассматривать троированный релейный регулятор (m=1).
Пусть, например, отказал первый релейный элемент 5 в первом канале 18 таким образом, что порог его срабатывания h1 значительно уменьшился. В этом случае при увеличении сигнала Х от нуля со скоростью Y>b увеличивается и сигнал второго сравнивающего устройства 7 U7, и при достижении сигналом U7 значения h1 включается первый релейный элемент 5 первого канала 18, формируя выходной сигнал U5, который поступает на вход формирователя 6. Выходной сигнал формирователя 6 подается на вход мажоритарного устройства 15, и так как на остальных его входах сигналы равны нулю, то выходной сигнал мажоритарного устройства 15 U15=0. В соответствии с (5) выходной сигнал ключа 14 U14=0 и выходной сигнал интегратора 4 U4 будет увеличиваться вместе с сигналом U7, что приведет непрерывному включению первого релейного элемента 5 и формирователя релейного сигнала 6 первого неисправного канала 18. Это состояние будет сохраняться до тех пор, пока сигнал Х не достигнет порога включения h1 первого релейного элемента 5 исправного канала 19 или 20. В этот момент включается первый релейный элемент 5 второго 19 и третьего 20 каналов, на выходах формирователей 6 этих каналов появляется сигнал U6=1, и в результате на выходе мажоритарного устройства 15 всех каналов появляется сигнал U15=1, который воздействует на объект управления 12, поступает на вход устройства формирования оптимального смещения линий переключения регулятора 13 и управляющий вход ключа 14 и открывает его. В соответствии с (5) выходной сигнал ключа 14 U14=U5 и релейный регулятор формирует управляющее воздействие My. Переключение управляющего воздействия произойдет в точке a1 (фиг.2), сигнал U13 будет изменяться в соответствии с (20), что приводит к непрерывному включению двигателя, и изображающая точка будет двигаться по траектории N в область устойчивого состояния В. Таким образом, формирование управляющего воздействия My на объект управления начинается в момент, когда сигнал Х достигает значения h1, т.е. в точке а фиг.2, определяемой исправным каналом. Траектория движения изображающей точки А представляет собой линию А→а→a1, фиг.2. Переключение управления произойдет в точке a1 пересечения смещенной линии переключения L2 (18) и линии N (25). Далее два исправных канала формируют управляющее воздействие My, обеспечивающее движение изображающей точки по траектории N (25). Иначе говоря, при рассмотренном единичном отказе в первом канале 18 релейный регулятор обеспечивает исправное управление объектом, при этом изображающая точка А движется по оптимальной траектории А→а→a1→а0.
Рассмотрим другой отказ, например отказал любой из элементов 1, 2, 3, 4 или 7 первого канала 18 таким образом, что выходной сигнал второго сравнивающего устройства 7 U7 этого канала остается меньше значения h1. В этом случае первый релейный элемент 5 первого канала 18 остается в выключенном состоянии, и его выходной сигнал U5 и выходной сигнал формирователя релейного сигнала 6 U6 будут равны нулю. При увеличении сигнала Х от нуля со скоростью Y>b увеличивается и сигнал второго сравнивающего устройства 7 U7 исправных каналов 19 и 20, и при достижении сигналом U7 значения h1 включается первый релейный элемент 5 этих каналов, формируя выходной сигнал U5, который поступает на вход формирователя 6. На выходах формирователей 6 этих каналов появляется сигнал U6=1, и в результате на выходе мажоритарного устройства 15 всех каналов появляется сигнал U15=1, который воздействует на объект управления 12, поступает на вход устройства формирования оптимального смещения линий переключения регулятора 13 и управляющий вход ключа 14 и открывает его. В соответствии с (5) выходной сигнал ключа 14 U14=U5 и релейный регулятор формирует управляющее воздействие My, переключение которого происходит в точке пересечения смещенной линии переключения L2 (18) и линии оптимальной траектории N (25). Дальнейшее формирование управляющего воздействия аналогично уже описанному выше. Таким образом, при рассмотренном единичном отказе в первом канале 18 релейный регулятор обеспечивает исправное управление объектом, при этом изображающая точка А движется по оптимальной траектории А→а→a1→а0, определяемой исправными каналами.
При других отказах в любом из каналов формирование управляющего воздействия My аналогично описанному выше процессу. Рассмотренный релейный регулятор обеспечивает исправное функционирование при любом единичном отказе.
Оценим надежность известного [2] и предлагаемого решения. Пусть надежность известного решения [2] равна р1, надежность дополнительно введенных в каждый канал предлагаемого релейного регулятора ключа 14, мажоритарного устройства 15 и схемы выделения модуля 17 равна р2, а надежность каждого канала предлагаемого решения равна р=p1p2. Надежность Рп предлагаемого решения можно оценить в виде

где C2 2m+1 - число сочетаний из (2m+1) по 2, Cm 2m+1 - число сочетаний из (2m+1) по m.
Пусть m=1, p1=0,9, p2=0,99 (сложность известного решения значительно превышает сложность дополнительно введенных в каждый канал трех элементов). В этом случае из (27) имеем Рп=0,967. Таким образом, надежность предлагаемого релейного регулятора Рп=0,967 выше надежности известного релейного регулятора р1=0,9.
Предлагаемая совокупность признаков в рассмотренных авторами решениях не встречалась для решения поставленной задачи и не следует явным образом из уровня техники, что позволяет сделать вывод о соответствии технического решения критериям "новизна" и "изобретательский уровень" В качестве элементов для реализации устройства могут быть использованы стандартные элементы: усилители, интеграторы, релейные элементы, сравнивающие устройства, сумматоры, элементы И, элементы ИЛИ, ключи, множительные устройства, мажоритарные устройства, схемы выделения модуля.
Литература
1. Патент RU 2223528, кл. G05B 11/14, 2004.
2. Патент RU 2396586, кл. G05B 11/14, 2010.
3. Уткин В.И. Скользящие режимы и их применение в системах с переменной структурой. М.: Наука, 1981, с.33-240.
4. Патент RU 2005330, кл. H03K 19/23.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2010 |
|
RU2441265C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2396586C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2385480C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2403607C2 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1997 |
|
RU2115150C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1997 |
|
RU2113004C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1999 |
|
RU2150726C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2002 |
|
RU2223528C2 |
| РЕЛЕ ПЕРЕМЕННОГО ТОКА | 1994 |
|
RU2097892C1 |
| УСТРОЙСТВО ДЛЯ СРАВНЕНИЯ ФАЗ | 1994 |
|
RU2097776C1 |
Изобретение относится к автоматике и может быть использовано в резервированных системах управления различными инерционными объектами, например поворотными платформами, промышленными роботами, летательными аппаратами. Техническим результатом является повышение надежности функционирования систем управления за счет использования релейного регулятора, обеспечивающего исправное функционирование при любом единичном отказе в любом канале. Релейный регулятор содержит (2m+1) канал, а каждый канал содержит первое и второе сравнивающие устройства, усилитель с ограничением, интегратор, первый и второй релейные элементы, интегратор с ограничением, сумматор, формирователь релейного сигнала с задержкой на отключение, устройство формирования оптимального смещения линий переключения регулятора, мажоритарное устройство, схему выделения модуля и ключ. 2 ил.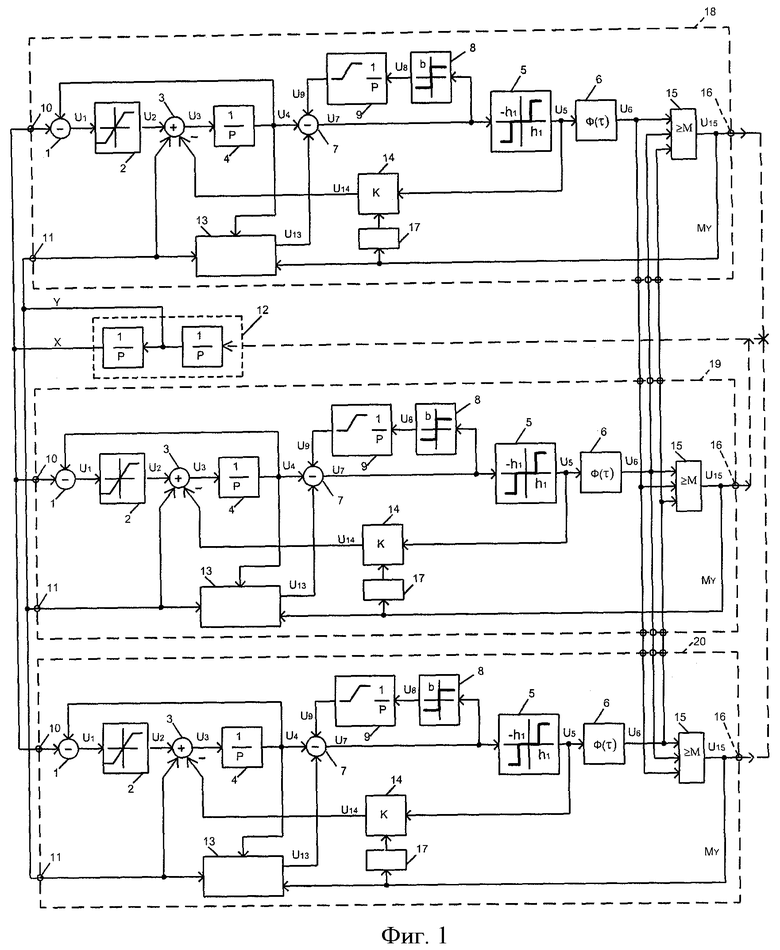
Релейный регулятор, содержащий устройство формирования оптимального смещения линий переключения регулятора и последовательно соединенные шину сигнала позиционного отклонения, первое сравнивающее устройство, усилитель с ограничением, сумматор, интегратор, второе сравнивающее устройство, первый релейный элемент и формирователь релейного сигнала с задержкой на выключение, и последовательно соединенные второй релейный элемент и интегратор с ограничением, выход которого подключен к инвертирующему входу второго сравнивающего устройства, выход которого соединен с входом второго релейного элемента, при этом выход интегратора соединен с инвертирующим входом первого сравнивающего устройства и первым входом устройства формирования оптимального смещения линий переключения регулятора, второй вход которого соединен с шиной сигнала скорости изменения позиционного отклонения и вторым неинвертирующим входом сумматора, а выход устройства формирования оптимального смещения линий переключения регулятора соединен со вторым неинвертирующим входом второго сравнивающего устройства, отличающийся тем, что в него дополнительно введены 2m (m=1, 2, …) аналогичных регуляторов, каждый из которых дополнительно содержит мажоритарное устройство, ключ и схему выделения модуля, при этом выход мажоритарного устройства соединен с шиной выходного сигнала, с третьим входом устройства формирования оптимального смещения линий переключения регулятора и входом схемы выделения модуля, выход которой соединен с управляющим входом ключа, выход которого соединен с инвертирующим входом сумматора, а сигнальный вход ключа соединен с выходом первого релейного элемента, выход формирователя релейного сигнала с задержкой на выключение соединен с первым входом мажоритарного устройства и соответствующими входами мажоритарного устройства других каналов.
| Противоблокировочная тормозная система | 1980 |
|
SU1022839A1 |
| ПРОИЗВОДНЫЕ 1,4-БИС-ЗАМЕЩЕННЫХ 2,6,7-ТРИОКСАБИЦИКЛО [2.2.2] ОКТАНОВ | 1992 |
|
RU2051152C1 |
| US 4758943 А, 19.07.1988 | |||
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2007 |
|
RU2342690C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2002 |
|
RU2223528C2 |

