Изобретение относится к автоматике и может быть использовано в системах управления различными инерционными объектами, например поворотными платформами, промышленными роботами, летательными аппаратами.
Преимущественно заявляемое устройство предназначено для использования в системе управления космическим аппаратом (КА) в режиме его ручного управления в процессе сближения и стыковки с другим аппаратом.
В процессе сближения предварительно обеспечивается автоматическое поддержание заданного углового положения КА относительно направления сближения с другим КА, также имеющим стабилизированное угловое положение. Затем в режиме ручного управления обеспечивается продольное движение первого КА на заданный ориентир второго КА при поддержании минимальных линейных скоростей и отклонений относительно направления сближения. Правильность управления сближением обеспечивается поддержанием положения ориентира в заданной (центральной) области оптических средств, через которые наблюдается ориентир. «Уход» ориентира из заданной области может быть вызван либо продольным смещением КА относительно линии сближения, либо его угловыми перемещениями. Для того чтобы «развязать» продольные смещения от угловых движений КА, надо обеспечить крайне малые скорости последних. В этом случае угловые движения не будут влиять на управление линейными перемещениями КА.
Заявляемое устройство относится к классу устройств, обеспечивающих малые скорости регулируемых параметров в процессе поддержания заданных ошибок позиционных отклонений, в частности для обеспечения минимально возможных угловых скоростей в процессе поддержания заданного углового отклонения КА.
Известен релейный регулятор [1], содержащий сумматор, релейный элемент, охваченный интегрирующей отрицательной обратной связью, и управляемый формирователь импульсов.
Недостаток этого устройства состоит в том, что он имеет низкую помехозащищенность и ограниченный рабочий диапазон, определяемый линейной (информационной) зоной датчика позиционного отклонения.
Известен также релейный регулятор [2], содержащий последовательно соединенные шину сигнала позиционного отклонения, сравнивающее устройство, усилитель с ограничением, сумматор и интегратор, охваченные отрицательной обратной связью с выхода интегратора на инвертирующий вход сравнивающего устройства, а также последовательно соединенные релейный элемент и формирователь релейного сигнала с задержкой на выключение.
Недостаток этого релейного регулятора состоит в том, что он не может обеспечить малых (заданных) динамических ошибок системы управления, в состав которой входит указанный регулятор, если на объект управления действуют внешние возмущения.
Наиболее близким по функциональному построению к заявляемому устройству является релейный регулятор [3].
Устройство-прототип [3] содержит последовательно соединенные шину сигнала позиционного отклонения, сравнивающее устройство, усилитель с ограничением, сумматор, интегратор, охваченные отрицательной обратной связью с выхода интегратора на инвертирующий вход первого сравнивающего устройства, второе сравнивающее устройство и интегратор с ограничением, выход которого соединен с инвертирующим входом второго сравнивающего устройства. Устройство-прототип также содержит последовательно соединенные трехпозиционный релейный элемент и формирователь релейного сигнала с запаздыванием на выключение, вход которого подключен к выходу трехпозиционного релейного элемента и второму инвертирующему входу сумматора, третий неинвертирующий вход которого соединен с шиной сигнала скорости изменения позиционного отклонения.
Указанное устройство обеспечивает заданную точность поддержания в установившихся режимах, в том числе при действии внешних возмущений.
Однако использование известного устройства в системе управления не позволяет достичь ее высокой динамической точности: устранить или уменьшить до заданных пределов перерегулирование по скорости изменения позиционного отклонения в случае гашения ее больших начальных скоростей и при отработке появляющихся внешних возмущений на объект управления.
Задача изобретения - повышение динамической точности при управлении в условиях действия на объект управления внешних возмущений и при отработке больших начальных скоростей позиционного отклонения.
Эта задача решается тем, что в релейный регулятор, содержащий последовательно соединенные шину сигнала позиционного отклонения, первое сравнивающее устройство, усилитель-ограничитель, сумматор, интегратор, охваченные отрицательной обратной связью с выхода интегратора на инвертирующий вход первого сравнивающего устройства, второе сравнивающее устройство и интегратор с ограничением, выход которого соединен с инвертирующим входом второго сравнивающего устройства, а также последовательно соединенные трехпозиционный релейный элемент и формирователь релейного сигнала с запаздыванием на выключение, вход которого подключен к выходу трехпозиционного релейного элемента и второму инвертирующему входу сумматора, третий неинвертирующий вход которого соединен с шиной сигнала скорости изменения позиционного отклонения, дополнительно введены второй сумматор, включенный последовательно между выходом второго сравнивающего устройства и входом трехпозиционного релейного элемента, второй усилитель-ограничитель и блок умножения, выход которого соединен с вторым инвертирующим входом первого сумматора, первый вход блока умножения соединен с выходом трехпозиционного релейного элемента, второй вход блока умножения соединен с выходом второго сравнивающего устройства и входом усилителя-ограничителя, выход которого соединен с входом интегратора с ограничением и вторым входом второго сумматора, при этом значение зоны нечувствительности трехпозиционного релейного элемента выбирают меньше или равной уровню ограничения усилителя-ограничителя.
На фиг.1 приведена блок-схема релейного регулятора. На этой схеме:
1, 7 - сравнивающее устройство (первое и второе - соответственно),
2, 8 - усилитель-ограничитель (первый и второй - соответственно),
3, 10 - сумматор (первый и второй - соответственно),
4 - интегратор,
5 - трехпозиционный релейный элемент,
6 - формирователь релейного сигнала с запаздыванием на выключение (по тексту описания - ФРСЗВ 6),
9 - интегратор с ограничением,
11 - умножитель,
12 - шина сигнала позиционного отклонения (далее по тексту - ШСПО 10),
13 - шина сигнала скорости изменения позиционного отклонения (далее по тексту - ШССИПО 11),
14 - выходная шина релейного регулятора,
15 - объект управления (в состав регулятора не входит; он показан для полноты описания технического результата от применения заявленного устройства).
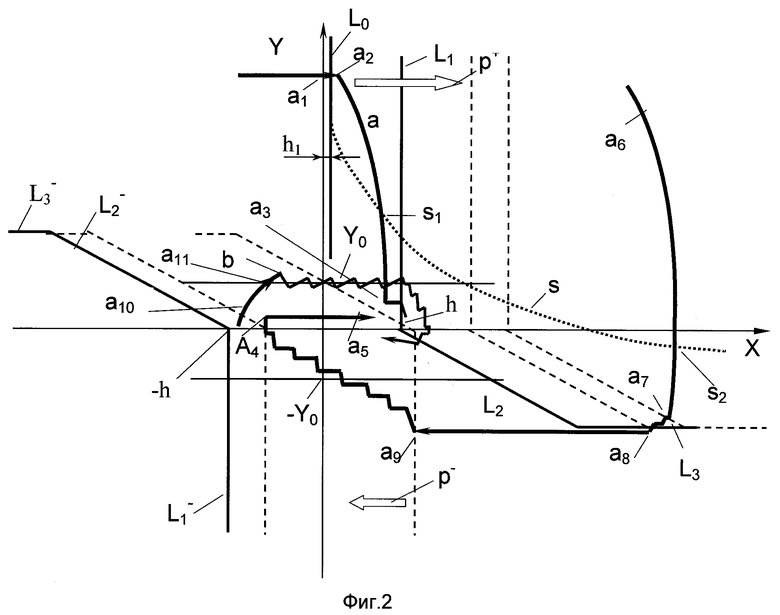
На фиг.2 приведен фазовый портрет системы с релейным регулятором в контуре управления.
На фиг.2 показано:
X, Y - фазовые координаты системы управления (в соответствии с фиг.1),
L0, L0 -,L1, L1 - - линии включения,
L2, L3, L2 -, L3 - - линии выключения,
а - фазовые траектории,
s - граница области скользящего режима (для Х>0).
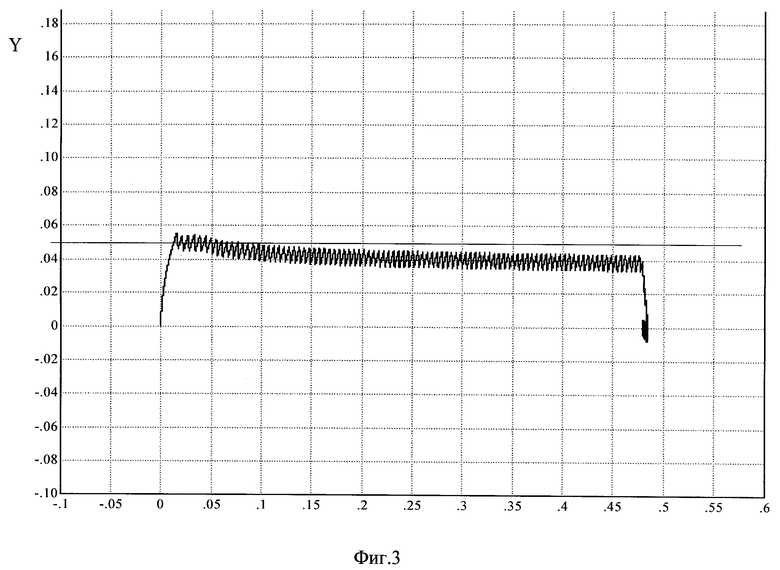
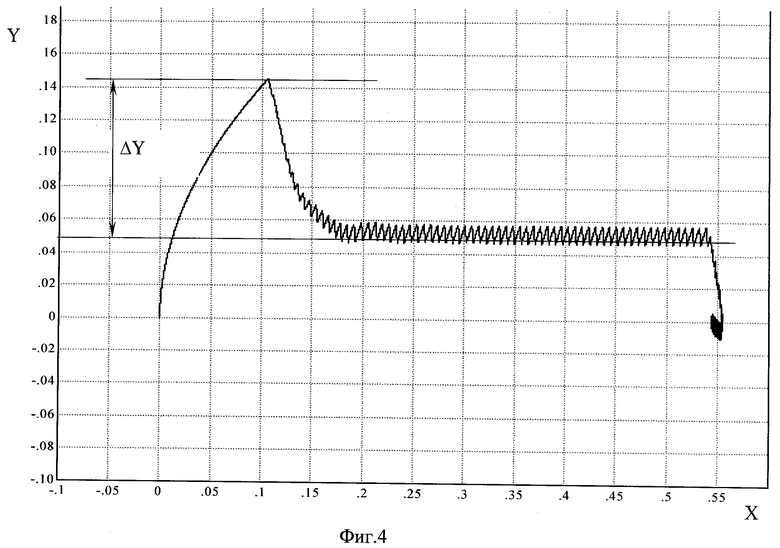
На фиг.3-6 показаны фазовые портреты системы управления КА при использовании заявленного устройства (фиг.3 и 5) и известного устройства (фиг.4 и 6). Данные фазовые портреты получены в результате математического моделирования и предназначены для сравнения характеристик заявленного и известного устройств.
В релейном регуляторе ШСПО 12, первое сравнивающее устройство 1, первый усилитель-ограничитель 2, первый сумматор 3, интегратор 4, второе сравнивающее устройство 7, сумматор 10, трехпозиционный релейный элемент 5, ФРСЗВ 6 соединены последовательно. Выход интегратора 4 соединен с инвертирующим входом первого сравнивающего устройства 1. Выход трехпозиционного релейного элемента 5 соединен со вторым инвертирующим входом первого сумматора 3, третий неинвертирующий вход которого подключен к ШССИПО 13, и с входом умножителя 11. Выход второго сравнивающего устройства 7 соединен через второй усилитель-ограничитель 8 с входом интегратора с ограничением 9, подключенного своим выходом к инвертирующему входу второго сравнивающего устройства 7. Выход второго усилителя-ограничителя 8 соединен с вторым входом второго сумматора 10. Выход ФРСЗВ 6 является источником управляющего воздействия My (см. фиг.1) на объект управления 15. ШСПО 12 и ШССИПО 13 являются источниками входных сигналов релейного регулятора, характеризующих выходные фазовые координаты объекта управления 15.
Рассмотрим работу релейного регулятора на примере управления ориентацией космического аппарата (объект управления 15). Пусть на входы (ШСПО 12) релейного регулятора поступают сигнал Х углового (позиционного) отклонения космического аппарата и сигнал Y (ШССИПО 13) скорости изменения углового отклонения (угловой скорости). Задача релейного регулятора - так формировать сигнал My (выходной сигнал ФРСЗВ 6 релейного сигнала с запаздыванием), чтобы свести сигналы Х и Y в область устойчивого состояния A⇒X∈(-h,+h), Y∈(-Y0,+Y0), где значения ± h определяют зону нечувствительности релейного регулятора, значения ±Y0 определяют допустимые значения угловой скорости в установившемся состоянии (зону нечувствительности релейного регулятора по угловой скорости) - упомянутые параметры показаны на фиг.2.
Релейный регулятор в системе управления описывается следующим образом


где My, Mв - управляющий и возмущающий моменты соответственно.
Далее по тексту: Ui - переменные состояния релейного регулятора (выходные сигналы функциональных блоков с соответствующими позиционными обозначениями).

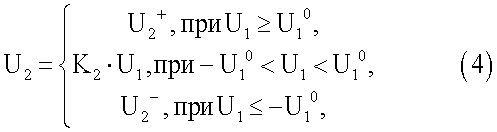
где Ui m - фиксированные (в роли параметров) значения переменных Ui (m - любой индекс). Здесь и далее по тексту: Ki - коэффициенты передачи переменных Ui.
В частности, U2 + и U2 - - значения уровней усилителя-ограничителя 2. Указанные значения определяют положения линий выключений L3 и L3 - на фазовом портрете (фиг.2). Значение K2 определяет наклон линий выключения L2 и L2 -.



Выражение (6) связывает сигналы на входе и выходе интегратора 4 ( ) - первая производная от сигнала U4.
) - первая производная от сигнала U4.
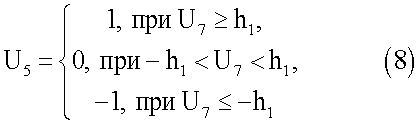
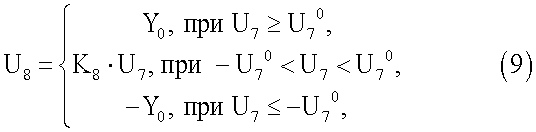
Здесь и далее по тексту: h1 - значение зоны нечувствительности трехпозиционного релейного элемента 5, ±Y0 - допустимые значения угловой скорости в установившемся состоянии, τ - запаздывание на выключение ФРСЗВ 6.
Выражение (8) описывает статическую характеристику трехпозиционного релейного элемента 5 как трехпозиционного релейного элемента без гистерезиса. При практической реализации значение гистерезиса должно быть минимальным, но достаточным для обеспечения частотного режима работы исполнительных органов.





где U+ 6 и U+ 5 - положительные значения сигналов U6 и U5,
U- 6 и U- 5 - отрицательные значения сигналов U6 и U5,
Ф(τ)⇒t6=t5+τ - означает преобразование релейного сигнала U5 длительности t5 в релейный сигнал U6 длительности t6.
Применительно к воздействию на объект управления 15 сигнал U6 является управляющим моментом My.
Законы формирования выходного сигнала My релейного регулятора, позволяющие привести в область устойчивого состояния А координат Х и Y, определяются выражениями (3-15).
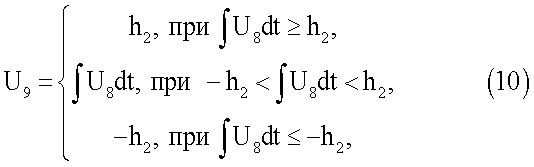
Остановимся на характеристиках некоторых элементов блок-схемы. Интегратор с ограничением 9 имеет выходной сигнал U9, ограниченный величиной ±h2, значение |h2+h1|=|h| соответствует границе зоны нечувствительности релейного регулятора в установившемся состоянии системы управления. Уровни срабатывания ±h1 трехпозиционного релейного элемента 5 выбираются по абсолютному значению значительно меньше величины |±h| (пусть h1=0,1 h). Уровни ограничения второго усилителя-ограничителя 8 выбираются равными ±Y0 (соответствует допустимому значению угловой скорости в установившемся состоянии).
Рассмотрим работу релейного регулятора.
Пусть сигнал Х увеличивается от нуля со скоростью Y>Y0 (участок a1-а2 траектории а). В этом случае
за счет того, что сигнал U8 не превышает по абсолютному значению Y0. Происходит увеличение сигналов U2, U4, U7. При достижении сигналом U7 значения h1 включается трехпозиционный релейный элемент 5 (точка а2 траектории), формируя выходной сигнал U5, который поступает на второй инвертирующий вход первого сумматора 3, вход умножителя 11 и вход ФРСЗВ 6, выходной сигнал My которого является выходным сигналом регулятора и используется для включения исполнительных двигателей. ФРСЗВ 6 представляет собой релейный элемент с задержкой на выключение: срабатывание ФРСЗВ 6 происходит одновременно со срабатыванием трехпозиционного релейного элемента 5, а выключение - через время τ после выключения первого релейного элемента 5 (см.11-13).
Если положение изображающей точки (сигналы Х и Y) находится выше линии S (граница «скользящего режима» [4]) - участки а2-s1, a6-s2, то трехпозиционный релейный элемент 5 включен непрерывно. При попадании в область скользящего режима (участки s1-а3 и далее, s2-a7 и далее) в контуре: первое сравнивающее устройство 1, первый усилитель-ограничитель 2, первый сумматор 3, интегратор 4, второе сравнивающее устройство 7, трехпозиционный релейный элемент 5, возникает скользящий режим, для которого характерно переключение трехпозиционного релейного элемента 5 с частотой fp, определяемой скоростью изменения сигнала Х (угловой скоростью Y). Если fp>1/τ, то выходной сигнал My регулятора непрерывен (участки s1-а3, s2-a7). Если fp<1/τ, то выходной сигнал My регулятора - релейно-импульсный, частоты fp и длительности τ (например, участок a7-a8). Включение ФРСЗВ 6 обеспечивает приведение координат X, Y в область устойчивого состояния А (участок a8-a9-a4).
Для сигнала Х положение линии включения L0 в первый момент соответствует границе h1 зоны нечувствительности трехпозиционного релейного элемента 5. После его включения вследствие действия сигналов отрицательной обратной связи (сигналы U5 и U11) происходит «смещение» линии включения (а также линий выключения) в направлении p+. Положение смещенных линий включений и отключения показаны пунктиром. В частности, например, выход из непрерывного режима включения происходит на смещенной линии отключения в точке а7. При выключении трехпозиционного релейного элемента 5 по мере уменьшения сигнала Х (например, участок a8-а9) происходит смещение линий переключения в направлении p+. Смещение происходит с постоянной скоростью, если сигнал U2 ограничен значениями U2 +, U2 - (4) и с уменьшающейся (по абсолютному значению) скоростью, если сигнал U2 находится на линейном участке первого усилителя-ограничителя 2.
Выбором наклона и ограничения выходной характеристики первого усилителя-ограничителя 2 достигаются требуемые параметры линий переключения релейного регулятора, в частности коэффициент усиления усилителя-ограничителя 2 определяет наклон линий L2 и L2 -, уровень его ограничения определяет положение линий L3 и L3 -.
Далее, пусть сигнал Х увеличивается от нуля со скоростью Y<Y0 (участок а4-а5 траектории а). В этом случае выходной сигнал U4 интегратора 4 равен сигналу X, что обеспечивается структурой контура, образованного первым сравнивающим устройством 1, первым усилителем-ограничителем 2, первым сумматором 3 и интегратором 4, а выходной сигнал U7 второго сравнивающего устройства 7 меньше h1, так как обеспечивается слежение выходного сигнала U9 интегратора с ограничением 9 за выходным сигналом U4 интегратора 4. В рассматриваемом случае трехпозиционный релейный элемент 5 выключен, что соответствует режиму установившегося состояния, для которого координаты X, Y∈А (А - область режима «установившегося» состояния: малые скорости, отклонения в пределах заданной зоны нечувствительности).
Пусть, например, теперь сигнал Х увеличивается от нуля с постоянно нарастающей скоростью (участок а10-а11 траектории а) и в некоторый момент выполнится условие Y>Y0 (точка a11) - данный процесс возникает при действии на объект управления внешнего постоянного возмущения. Начиная с указанного момента происходит быстрое увеличение сигнала U8 до уровня Y0, в соответствии с (16) сигнал U4 начинает «опережать» сигнал U9 на величину h1. Одновременное действие сигналов U7 и U8 приводит к срабатыванию трехпозиционного релейного элемента 5 (точка b). Далее: происходит включение ФРСЗВ 6 → начинается «гашение» скорости → происходит выключение трехпозиционного релейного элемента 5 → происходит выключение ФРСЗВ 6 → далее за счет увеличения скорости происходит срабатывание трехпозиционного релейного элемента 5 и процесс повторяется. Таким образом, обеспечивается режим стабилизации скорости, значение которой близко к значению Y0.
Значение h1 выбирают близким к значению Y0, поэтому происходит форсированное включение трехпозиционного релейного элемента 5, а затем поддержание его включения вследствие действия сигнала U4.
Расчеты и математическое моделирование показывают, что коэффициент усиления первого усилителя-ограничителя 2 следует выбирать в пределах от 0.3 до 0.8, а коэффициент усиления второго усилителя-ограничителя 8 следует выбирать от 5 до 15.
Аналитическая оценка эффективности предлагаемого релейного регулятора крайне громоздка. Нагляднее показать эффективность с помощью сравнения фазовых портретов, полученных при математическом моделировании предлагаемого и известного релейных регуляторов. Нижеприведенные процессы моделировались при коэффициенте усиления первого усилителя-ограничителя 2, равном 0.67, и коэффициенте усиления второго усилителя-ограничителя 8, равном 10.
На фиг.3 и 4 показаны процессы изменения ошибки управления Х и скорости ошибки управления Y при парировании внешнего возмущения в условиях начальных значений Х=0, Y=0 при использовании предлагаемого (фиг.3) и известного [3] (фиг.4) устройств.
Из сравнительного анализа процессов видно, что при использовании известного устройства имеется перерегулирование до уровня 0.145 при заданном установившемся значении 0.05 (заданное установившееся значение скорости соответствует уровням ограничения усилителя-ограничителя 8), т.е. перерегулирование ΔY практически достигает 200%.
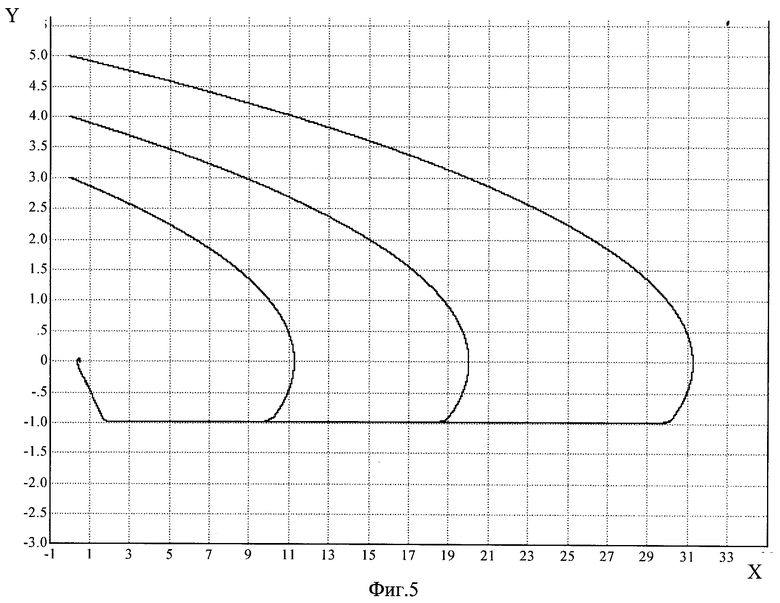
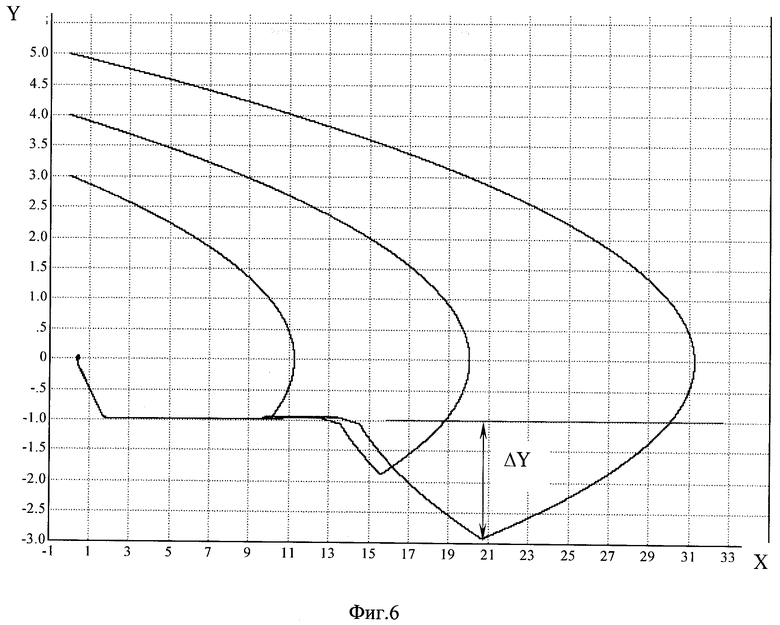
На фиг.5 и 6 показаны процессы изменения ошибки управления Х и скорости ошибки управления Y при отработке начальной скорости Y=5 в условиях начального значения Х=0, при использовании предлагаемого (фиг.5) и известного [3] (фиг.6) устройств.
Из сравнительного анализа процессов видно, что при использовании известного устройства система управления имеет перерегулирование ΔY примерно до уровня минус 3.0 при заданной скорости приведения в область установившегося значения минус 1.0 (заданное установившееся значение скорости приведения соответствует уровням ограничения усилителя-ограничителя 2), т.е. перерегулирование также практически достигает 200%. При начальной скорости Y=4 перерегулирование достигает значения минус 1.8.
Указанный положительный эффект достигается совместным действием дополнительного сигнала (U11) отрицательной обратной связи, поступающего с выхода умножителя 11 и дополнительной компоненты (сигнал U8) в сигнале U10 на входе трехпозиционного релейного элемента 5: сигнал U8 уменьшает зону нечувствительности для сигала U7, а действие сигнала U11 увеличивает демпфирующие свойства контура отрицательной обратной связи релейного регулятора.
Предлагаемая совокупность признаков в рассмотренных авторами решениях не встречалась для решения поставленной задачи и не следует явным образом из уровня техники, что позволяет сделать вывод о соответствии технического решения критериям "новизна" и "изобретательский уровень". В качестве элементов для реализации устройства могут быть использованы стандартные элементы: усилители, интеграторы, релейные элементы, сравнивающие устройства, сумматоры.
Литература
1. SU. Авторское свидетельство 1137472, кл. G05В 11/14, 1985.
2. RU. Патент 2115150, кл. G05В 11/14, 13/02, 11/01, 1998.
3. RU. Патент 2223528, кл. G05В 11/14, 2004 (прототип).
4. Уткин В.И. Скользящие режимы и их применение в системах с переменной структурой. М. Наука, 1981, с.233-240.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2396586C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2010 |
|
RU2447474C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2385480C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2010 |
|
RU2441265C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1999 |
|
RU2150726C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1997 |
|
RU2113004C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2002 |
|
RU2223528C2 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1997 |
|
RU2115150C1 |
| Релейный регулятор | 1990 |
|
SU1836658A3 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
Изобретение относится к автоматике и может быть использовано в системах управления различными инерционными объектами, например поворотными платформами, промышленными роботами, летательными аппаратами. Релейный регулятор содержит первое и второе сравнивающие устройства, первый и второй интеграторы, первый и второй релейные элементы, сумматор и формирователь релейного сигнала. Закон формирования выходного сигнала определяется параметрами усилителя - коэффициентом усиления и величиной ограничения, а также уровнем выходного сигнала второго релейного элемента и уровнем ограничения второго интегратора. Технический результат - релейный регулятор повышает динамическую точность углового отклонения в переходном процессе и динамическую точность угловой скорости в установившемся состоянии при возникновении возмущающих моментов, что улучшает динамические характеристики релейного регулятора. 6 ил.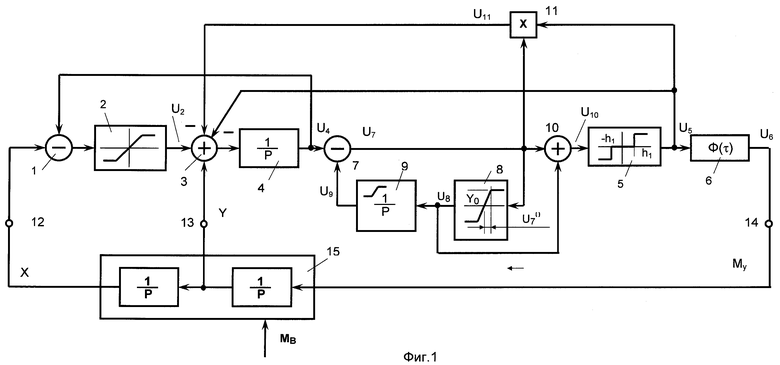
Релейный регулятор, содержащий последовательно соединенные шину сигнала позиционного отклонения, первое сравнивающее устройство, первый усилитель-ограничитель, первый сумматор, интегратор, охваченные отрицательной обратной связью с выхода интегратора на инвертирующий вход первого сравнивающего устройства, второе сравнивающее устройство и интегратор с ограничением, выход которого соединен с инвертирующим входом второго сравнивающего устройства, а также последовательно соединенные трехпозиционный релейный элемент, и формирователь релейного сигнала с запаздыванием на выключение, вход которого подключен к выходу трехпозиционного релейного элемента и второму инвертирующему входу сумматора, третий неинвертирующий вход которого соединен с шиной сигнала скорости изменения позиционного отклонения, отличающийся тем, что в него дополнительно введены второй сумматор, включенный последовательно между выходом второго сравнивающего устройства и входом трехпозиционного релейного элемента, второй усилитель-ограничитель и блок умножения, выход которого соединен с вторым инвертирующим входом первого сумматора, первый вход блока умножения соединен с выходом трехпозиционного релейного элемента, второй вход блока умножения соединен с выходом второго сравнивающего устройства и входом первого усилителя-ограничителя, выход которого соединен с входом интегратора с ограничением и вторым входом второго сумматора, при этом значение зоны нечувствительности трехпозиционного релейного элемента выбирают меньше или равной уровню ограничения второго усилителя-ограничителя.
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2002 |
|
RU2223528C2 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1997 |
|
RU2115150C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1999 |
|
RU2150726C1 |
| RU 2055387 C1, 27.02.1996 | |||
| Релейный регулятор | 1990 |
|
SU1836658A3 |
| Способ получения 2,6-диметил-4трет-бутилацетофенона | 1973 |
|
SU455938A1 |
| СПОСОБ ВОСПОЛНЕНИЯ КРОВОПОТЕРИ ПРИ ОПЕРАЦИЯХ НА ЛЕГКИХ У БОЛЬНЫХ ТУБЕРКУЛЕЗОМ | 2002 |
|
RU2245720C2 |

