Устройство формирования управляющих воздействий может быть использовано для управления движением космических аппаратов.
Известно устройство формирования управляющих воздействий, используемое при ручном управлении космическими аппаратами. Устройство описано в книге Лебедев А.А, Соколов В.Б. "Встреча на орбите", Машиностроение, Москва, 1969 г.
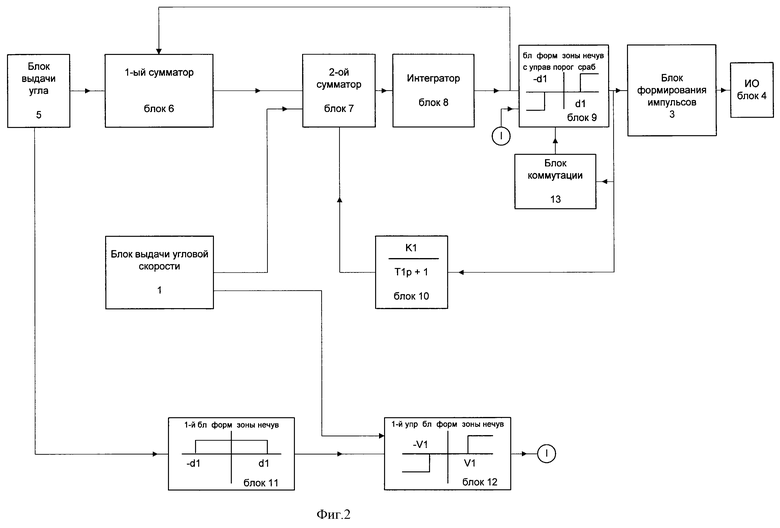
Блок-схема устройства приведена на фиг. 1.
Устройство состоит из блока выдачи угловой скорости 1, порогового устройства (блок 2), блока формирования импульсов 3 и исполнительных органов (ИО) 4.
При превышении сигналом угловой скорости заданного в пороговом устройстве значения блок задания управляющих импульсов в зависимости от величины сигнала угловой скорости выдает команды на включение ИО. Выключение ИО производится, когда угловая скорость станет меньше заданного в пороговом устройстве значения.
Данное устройство ограничивает только величину угловой скорости, а потому не обеспечивает стабилизацию объекта управления относительно заданной системы координат.
Известно устройство стабилизации (патент N 1695263 авторов Бичуцкого А. Я. , Леденева Г.Я., Нездюра Л.А., Фрунца А.С.), выбранное в качестве прототипа. Блок-схема устройства приведена на фиг. 2.
Устройство состоит из блока выдачи угловой скорости 1, блока формирования управляющих импульсов 3, исполнительных органов 4, блока выдачи угла 5, 2-х сумматоров 6 и 7, интегратора 8, блока формирования зоны нечувствительности с управляемым порогом срабатывания 9, апериодического звена 10, 1-го блока формирования зоны нечувствительности 11, 1-го управляемого блока формирования зоны нечувствительности 12, блока коммутации 13.
Данное устройство обеспечивает стабилизацию относительно заданной системы координат по углу и угловой скорости с заданными точностями. Отклонение от номинального положения определяется значениями порогов срабатывания блоков формирования зон нечувствительности. С учетом связей, приведенных на фиг. 2, до тех пор, пока сигнал на входе блока 9 меньше ее порогового значения a1, сигнал на выходе интегратора 8 fi1 равен сигналу на выходе датчика угла 5 - fi1 Два сумматора 6 и 7 и интегратор 8 с учетом связи с выхода датчика угловой скорости на вход сумматора 7 обеспечивают фильтрацию сигналов угла и угловой скорости. После срабатывания блока 9 (при превышении f1 значения d1) выход ее через апериодическое звено 10 подключается к сумматору 7.
Введение такой связи, если представить зону нечувствительности усилителем с коэффициентом усиления Kу, обеспечивает включение интегратора в обратную связь, и вследствие этого на выходе блока 9 сигнал будет состоять из суммы угла и его производной.
Выход блока выдачи угла 5 подключен и к блоку 11. Пока сигнал угла fi1 меньше порога срабатывания d1 блока 11, блоку 12 разрешается сравнивать значение угловой скорости с заданным порогом по скорости. Выход блока 12 соединен с блоком 9. Вход блока коммутации 13 соединен с выходом блока 9, а выход - с входом блока 9.
Вследствие того, что после превышения углом fi1 порогового значения блока 9 сигнал на выходе интегратора содержит информацию об угле и угловой скорости, то включения ИО будут продолжаться до тех пор, пока угловая скорость не сменит знак, а ее значение не станет соответствующим величине угла.
Таким образом, включение ИО производится при превышении углом заданного порогового значения d1 (заданная точность по углу), а вследствие изменения структуры устройства после срабатывания порогового устройства блока 9 выключение производится по текущему значению угла и угловой скорости.
При значении угла меньше d1 производится сравнение значения текущей скорости с пороговым значением V1 в блоке 12. Если скорость станет больше V1, то в блок 9 выдается сигнал на присвоение пороговому значению значения текущего угла. В результате произойдет включение ИО, которое будет производиться по описанной выше логике.
В исходное состояние устройство приводится при срабатывании зоны нечувствительности 9 противоположного знака. Если раньше скорость превысит величину порога противоположного знака блока 12, то снова производится присвоение пороговому значению блока 9 значение текущего угла, а измененное ранее пороговое значение (противоположного знака) также приводится в исходное состояние.
Устройство обладает высоким качеством переходных процессов как при отсутствии внешних возмущений, так и при их наличии и не имеет ограничений при реализации устройства на базе аналоговой техники. Однако реализация его в дискретных устройствах стабилизации ограничивается по следующим причинам. Во-первых, регулирование скорости ухудшается из-за дополнительного запаздывания, вносимого апериодической обратной связью. Во-вторых, наличие интегратора в дискретных устройствах стабилизации ограничивает величину коэффициента усиления блока 9, что также вносит запаздывание, величина которого будет не менее 1,5 - 2-х тактов работы устройства стабилизации. В третьих, данное устройство требует обязательного наличия и датчика угла и датчика угловой скорости, что не всегда выполнимо. Эти обстоятельства ограничивают возможность применения данного устройства при реализации вообще и на базе дискретной техники в частности.
Техническим результатом изобретения является повышение точности дискретных автоматов стабилизации с одновременным улучшением качества переходных процессов.
Технический результат достигается тем, что в устройство формирования управляющих воздействий, состоящее из блока выдачи угла, первого блока формирования зоны нечувствительности, первого управляемого блока формирования зоны нечувствительности, блока формирования импульсов и исполнительных органов, причем выход блока выдачи угла через последовательно включенные первый блок формирования зоны нечувствительности и первый управляемый блок формирования зоны нечувствительности соединен с блоком формирования импульсов, введены дополнительно второй, третий и четвертый блоки формирования зоны нечувствительности, второй управляемый блок формирования зоны нечувствительности, блок выдачи импульсов, длительность которых определяется суммой программной скорости и текущей скорости, пятый блок вычисления импульсов, генератор заданной частоты импульсов с заданной частотой, генератор выдачи импульсов в ответ на величину превышения угла заданного порогового значения, пропорциональных величине скорости и угла, генератор заданной частоты импульсов, предназначенный для включения ИО на время, первый, второй и третий блоки коммутации, блок формирования команд, блок вычисления текущей скорости, блок определения изменения знака приращения угла, блок определения готовности ориентации, блок запоминания и вычисления угла, блок определения изменения знака вычисленного угла, причем выход блока выдачи угла подключен к блоку вычисления текущей скорости, блоку определения изменения знака приращения угла, к генератору заданной частоты импульсов, предназначенному для включения ИО на время, и генератору выдачи импульсов в ответ на величину превышения угла заданного порогового значения, пропорциональных величине скорости и угла, к блоку определения готовности ориентации и к блоку запоминания и вычисления угла, а через второй блок коммутации к введенным второму, третьему и четвертому блокам формирования зоны нечувствительности, выход блока вычисления текущей скорости подключен к первому и второму управляемым блокам формирования зоны нечувствительности, к генератору выдачи импульсов в ответ на величину превышения угла заданного порогового значения, пропорциональных величине скорости и угла, блоку выдачи импульсов, длительность которых определяется суммой программной скорости и текущей скорости, и пятому блоку вычисления импульсов, а также к блоку определения готовности ориентации, выход второго блока формирования зоны нечувствительности через последовательно включенные генератор заданной частоты импульсов с заданной частотой и первый блок коммутации, ко второму входу которого подключен выход блока определения изменения знака приращения угла, соединен с исполнительными органами, выход третьего блока формирования зоны нечувствительности через генератор заданной частоты импульсов, предназначенный для включения ИО на время, соединен с первым блоком коммутации, выход четвертого блока формирования зоны нечувствительности через генератор выдачи импульсов в ответ на величину превышения угла заданного порогового значения, пропорциональных величине скорости и угла, соединен с исполнительными органами, второй выход первого управляемого блока формирования зоны нечувствительности соединен с блоком формирования команд, выход которого подключен к блоку запоминания и вычисления угла, выход блока определения готовности ориентации соединен со вторым и третьим блоками коммутации и блоком формирования команд, выход блока запоминания и вычисления угла соединен с блоком определения изменения знака вычисленного угла и блоком выдачи импульсов, длительность которых определяется суммой программной скорости и текущей скорости, выход которого соединен с исполнительными органами, выходы блока определения изменения знака вычисленного угла соединены с входом блока запоминания и вычисления угла, а через последовательно включенные второй управляемый блок формирования зоны нечувствительности и пятый блок вычисления импульсов - с исполнительными органами, а также с вторым и третьим блоками коммутации, выход блока формирования импульсов через третий блок коммутации соединен с исполнительными органами.
Технический результат в предлагаемом устройстве достигается за счет следующего:
- в устройстве исключено определение моментов включения и выключения исполнительных органов по суммарному сигналу угла и угловой скорости, что уменьшает время переходных процессов с одновременным уменьшением количества включений исполнительных органов,
- при близких к нулю значениях скорости объекта управления она не используется при принятии решения о включении или выключении исполнительных органов, что исключает влияние ошибок определения скорости на переходные и установившиеся процессы в предлагаемом устройстве,
- в тех случаях, когда использование угловой скорости необходимо, значение скорости близко или превышает введенные пороговые значения в блоках формирования зоны нечувствительности по скорости, а потому ошибки определения скорости не могут оказать принципиального влияния на качество регулирования,
- введенное изменение структуры устройства после окончания переходных процессов, связанных с парированием начальных условий, обеспечивает высокое качество стабилизации (близкую к нулю угловую скорость) при наличии внешних возмущающих воздействий.
Для определения окончания переходных процессов при первом включении предлагаемого устройства введен блок определения готовности ориентации, который выдает команду в блок формирования команд, разрешающую выдавать команды на изменение структуры устройства в случае, если угловая скорость превысит значения порога срабатывания в 1-ом блоке формирования зоны нечувствительности. По командам блока формирования команд 2-ой блок коммутации разрешает прохождение сигнала угла на входы 2-го, 3-его и 4-го блоков формирования зоны нечувствительности и запрещает прохождение команд из блока формирования импульсов на включение ИО.
Введение зоны по углу рассогласования  где выдаются управляющие импульсы только минимальной длительности, обеспечивает минимальное изменение скорости объекта независимо от точности знания скорости. Увеличение длительности управляющих импульсов в зоне
где выдаются управляющие импульсы только минимальной длительности, обеспечивает минимальное изменение скорости объекта независимо от точности знания скорости. Увеличение длительности управляющих импульсов в зоне  только в зависимости от величины угла, также повышает устойчивость и точность работы автомата при близких к нулю значениях скоростей объекта управления.
только в зависимости от величины угла, также повышает устойчивость и точность работы автомата при близких к нулю значениях скоростей объекта управления.
В тех случаях, когда в предлагаемом техническом решении используется значение текущей скорости рассогласования  , точность знания скорости не оказывает влияния на качество процесса. В этих случаях значение угловой скорости отличается от нуля, и ошибка знания ее может оказать влияние только на время переходного процесса и расход рабочего тела.
, точность знания скорости не оказывает влияния на качество процесса. В этих случаях значение угловой скорости отличается от нуля, и ошибка знания ее может оказать влияние только на время переходного процесса и расход рабочего тела.
Присвоение знака управляющего воздействия при углах рассогласования  по знаку угла исключает возможность выдачи управляющего воздействия ошибочного знака. Ошибочная выдача знака управляющего воздействия при всплесках скорости (из-за шумов или влияния упругих свойств объекта управления) возможна и в аналоге и в прототипе.
по знаку угла исключает возможность выдачи управляющего воздействия ошибочного знака. Ошибочная выдача знака управляющего воздействия при всплесках скорости (из-за шумов или влияния упругих свойств объекта управления) возможна и в аналоге и в прототипе.
При наличии команды о готовности ориентации, при угле рассогласования  и при превышении угловой скоростью порогового значения V1 1-го управляемого блока формирования зоны нечувствительности блок формирования команд выдает команду в блок запоминания и вычисления угла на запоминание того значения угла, при котором скорость превысила пороговое значение и вычисление угла относительно этого смещенного положения. Это делается для того, чтобы при наличии внешнего возмущающего момента снять статическую ошибку по скорости и перевести ее в статическую ошибку по углу.
и при превышении угловой скоростью порогового значения V1 1-го управляемого блока формирования зоны нечувствительности блок формирования команд выдает команду в блок запоминания и вычисления угла на запоминание того значения угла, при котором скорость превысила пороговое значение и вычисление угла относительно этого смещенного положения. Это делается для того, чтобы при наличии внешнего возмущающего момента снять статическую ошибку по скорости и перевести ее в статическую ошибку по углу.
Выбором коэффициента демпфирования в блоке выдачи импульсов, длительность которых определяется суммой программной скорости и текущей скорости, можно подобрать приемлемую статическую ошибку по углу.
Достоинством предлагаемого технического решения является также необязательность наличия датчика угловой скорости объекта управления. Для тех моментов при управлении, когда необходимо знание скорости, в предлагаемом устройстве используется вычисляемое по углу значение скорости. Случаи, когда необходимо знание скорости, влияют только на время переходного процесса. На точность и скорость объекта управления в установившемся режиме эти ошибки знания скорости не влияют.
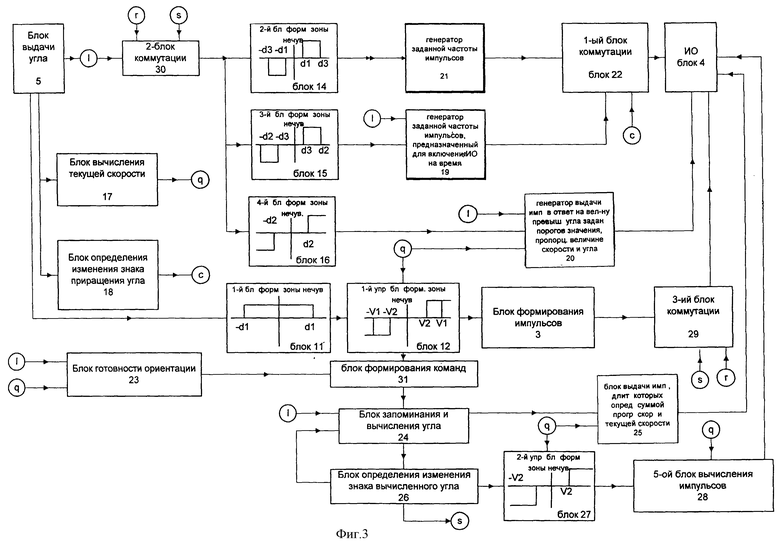
Суть изобретения может быть пояснена с помощью фиг. 3, на которой приведена блок-схема устройства.
Устройство состоит из исполнительных органов 4, блока выдачи угла 5, 1-го, 2-го, 3-го и 4-го блоков формирования зоны нечувствительности (11, 14, 15, 16), 1-го и 2-го управляемых блоков формирования зоны нечувствительности (12, 27), блока формирования импульсов 3, блока вычисления текущей скорости 17, блока определения изменения знака приращения угла 18, блока выдачи импульсов, длительность которых определяется суммой программной скорости и текущей скорости 25, 5-го блока вычисления импульсов (28), генератора заданной частоты импульсов с заданной частотой 21, генератора заданной частоты импульсов, предназначенного для включения ИО на время 19, генератора выдачи импульсов в ответ на величину превышения угла заданного порогового значения, пропорциональных величине скорости и угла 20, 1-го, 2-го и 3-го блоков коммутации (22, 30, 29), блока готовности ориентации 23, блока запоминания и вычисления угла 24, блока определения изменения знака вычисленного угла 26 и блока формирования команд 31.
Выход блока 5 соединен с входами блоков 11, 17, 18, 19, 20, 23, 24, а через блок 30 с блоками 14, 15, 16. Выход блока 17 соединен с блоками 12, 20, 23, 25, 27, 28. Выход блока 18 подключен к входу блока 22. Выход блока 14 через блоки 21 и 22 соединен с блоком 4. Выход блока 15 через блок 19 подключен к блоку 22. Выход блока 16 через блок 20 соединен с блоком 4. Выход блока 11 через блоки 12, 3 и 29 соединен с блоком 4. Выход блока 23 соединен с блоками 29 и 30, а через блок 31 с блоком 24. Выход блока 24 соединен с блоками 25 и 26. Выходы блока 26 соединены с блоком 24, через блоки 27 и 28 - с блоком 4, а также с блоками 29 и 30.
При осуществлении ориентации относительно заданного положения угол рассогласования Л из блока выдачи угла 5 поступает на вход 1-го блока формирования зоны нечувствительности 11, а через 2-ой блок коммутации (30) - на входы 2-го, 3-го и 4-го блоков формирования зоны нечувствительности (14, 15 и 16). Каждая из зон настроена на определенное значение для выполнения функций в соответствие с заложенной логикой управления.
При  блок 11 выдает команду в блок 12. При наличии этой команды и отсутствии команды о готовности ориентации из блока 23 блок 12 сравнивает значение скорости, вычисляемое в блоке 17, с заданным порогом. Если текущее значение скорости окажется более (или менее для отрицательных скоростей) заданного порога, то величина превышения порога выдается в блок 3, в котором пропорционально величине сигнала формируются импульсы, которые и выдаются в блок 4 через 3-ий блок коммутации (29) на включение ИО. Выключение ИО осуществляется при уменьшении текущего значения скорости до значения, задаваемого порогом на выключение в блоке 12.
блок 11 выдает команду в блок 12. При наличии этой команды и отсутствии команды о готовности ориентации из блока 23 блок 12 сравнивает значение скорости, вычисляемое в блоке 17, с заданным порогом. Если текущее значение скорости окажется более (или менее для отрицательных скоростей) заданного порога, то величина превышения порога выдается в блок 3, в котором пропорционально величине сигнала формируются импульсы, которые и выдаются в блок 4 через 3-ий блок коммутации (29) на включение ИО. Выключение ИО осуществляется при уменьшении текущего значения скорости до значения, задаваемого порогом на выключение в блоке 12.
При  блок 14 выдает команду в блок 21 на выдачу периодически повторяемых с наперед заданной частотой импульсов, обеспечивающих включение ИО на минимальное время. Знак выдаваемых импульсов назначается противоположным знаку угла Л. При изменении знака приращения угла на противоположный, определяемого в блоке 18, 1-ый блок коммутации (22), соединенный с блоком 18, запрещает выдачу управляющих импульсов на включение ИО.
блок 14 выдает команду в блок 21 на выдачу периодически повторяемых с наперед заданной частотой импульсов, обеспечивающих включение ИО на минимальное время. Знак выдаваемых импульсов назначается противоположным знаку угла Л. При изменении знака приращения угла на противоположный, определяемого в блоке 18, 1-ый блок коммутации (22), соединенный с блоком 18, запрещает выдачу управляющих импульсов на включение ИО.
При  блок 15 выдает команду в блок 19 на выдачу периодически повторяемых с наперед заданной частотой импульсов, обеспечивающих включение ИО на время, пропорциональное величине превышения угла заданного порогового значения
блок 15 выдает команду в блок 19 на выдачу периодически повторяемых с наперед заданной частотой импульсов, обеспечивающих включение ИО на время, пропорциональное величине превышения угла заданного порогового значения  . Знак выдаваемых импульсов назначается противоположным знаку угла fi. При изменении знака приращения угла на противоположный, определяемого в блоке 18, 1-ый блок коммутации (22), соединенный с блоком 18, запрещает выдачу управляющих импульсов на включение ИО.
. Знак выдаваемых импульсов назначается противоположным знаку угла fi. При изменении знака приращения угла на противоположный, определяемого в блоке 18, 1-ый блок коммутации (22), соединенный с блоком 18, запрещает выдачу управляющих импульсов на включение ИО.
При  блок 16 выдает команду в блок 20 на выдачу управляющего воздействия для набора угловой скорости, значение которой задается в виде функции, например, линейной, величине превышения углом заданного порогового значения
блок 16 выдает команду в блок 20 на выдачу управляющего воздействия для набора угловой скорости, значение которой задается в виде функции, например, линейной, величине превышения углом заданного порогового значения  . Включение ИО может быть импульсным или непрерывным, что определяется величиной скорости и характеристиками исполнительных органов. Знак выдаваемых импульсов назначается противоположным знаку угла fi. Включение ИО прекращается при значении текущей скорости, равном программной скорости.
. Включение ИО может быть импульсным или непрерывным, что определяется величиной скорости и характеристиками исполнительных органов. Знак выдаваемых импульсов назначается противоположным знаку угла fi. Включение ИО прекращается при значении текущей скорости, равном программной скорости.
При наличии команды о готовности ориентации, вырабатываемой в блоке 23 и означающей, что после включения устройства формирования управляющих воздействий начальные значения угла и угловой скорости были уменьшены до значений, заданных порогами срабатывания в блоке 23, в блок формирования команд (31) выдается команда, разрешающая блоку 12 выдавать команду в блок 24 на запоминание значения угла, при котором произошло превышение скоростью порога срабатывания, заданного в блоке 12, и на вычисление углового рассогласования относительно запомненного положения. По команде блока 26 2-ой и 3-ий блоки коммутации (29 и 30) запрещают прохождения сигналов через свои цепи до окончания регулирования (до смены знака вычисляемого угла). Вычисляемый в блоке 24 угол выдается блоком выдачи импульсов, длительность которых определяется суммой программной скорости и текущей скорости (блок 25). Длительность импульсов определяется алгебраической суммой программной скорости, пропорциональной величине вычисляемого угла, и текущей. После набора объектом управления заданной программной скорости производится выключение ИО.
Если в процессе регулирования вычисляемый угол изменит знак на противоположный, что определяется в блоке 26, то этот блок выдает команды во 2-ой и 3-ий блоки коммутации (29 и 30) на восстановление связей, в блок 24 на сброс запомненного значения и в блок 27 на проверку величины скорости - устройство приводится в исходное состояние, бывшее до момента появления внешнего возмущающего воздействия. Если скорость более порога блока 27, то выдается команда в 5-ый блок вычисления импульсов для выдачи управляющего воздействия такой длительности, чтобы скорость стала равной нулю. Порог срабатывания блока формирования зоны нечувствительности 27 должен быть меньше порога срабатывания в блоке 12.
Если до изменения знака вычисляемого угла сработает блок формирования зоны нечувствительности 12 другого знака, то устройство также приводится в исходное состояние, и тут же начинается новый процесс по запоминанию значения угла, новому вычислению угла относительно нового запомненного положения и весь процесс далее повторяется до смены знака вычисляемого угла или до нового срабатывания блока формирования зоны нечувствительности 12.
Приведенное описание функционирования устройства обеспечивает высокое качество переходных процессов при выборе начального рассогласования по углу и угловой скорости. В процессе поддержания стабилизированного положения (после выработки команды о готовности ориентации в блоке 23) при появлении внешнего возмущающего воздействия предлагаемое устройство обеспечит близкое к нулю среднее значение скорости объекта управления, а время выхода к среднему установившемуся значению скорости определяется величиной возмущающего момента и коэффициентами управления, заложенными в 4-ом блоке вычисления импульсов (блок 25), и может составить от 2-х до 5-ти тактов работы дискретного автомата стабилизации. При отсутствие внешнего возмущения и изменения скорости рассогласования из-за законов движения, например, при отслеживании положения линии визирования при автоматическом причаливании предлагаемое устройство обеспечит быстрое изменение скорости объекта для устранения рассогласования.
Моделирование показало, что у дискретного автомата стабилизации с тактом работы 0.2 сек качество переходных процессов выше, чем у прототипа, являющегося аналоговым автоматом.
Предлагаемое устройство может быть реализовано известными техническими решениями.
Блок выдачи угла 5 может быть исполнен в виде солнечного или звездного датчика, используемых на орбитальной станции "Мир".
Блоки формирования зоны нечувствительности 11, 14, 15, 16 могут быть выполнены на основе стандартных усилителей и схем сравнения.
Управляемые блоки формирования зоны нечувствительности 12 и 27 могут быть выполнены на основе стандартных усилителей и схем сравнения и контактов реле, отключающих или подключающих их входы, обмотки управления которых подключаются к соответствующим блокам.
Блок 3 (формирование импульсов) и блоки 19, 20, 21, 25, 28 (блоки вычисления импульсов) могут быть выполнены на основе стандартных усилителей и генераторов прямоугольных импульсов с широтной модуляцией.
Блок вычисления текущей скорости 17 может быть реализован двумя способами, выбор которых зависит от динамических свойств объекта управления. Вычисление скорости можно производить с помощью интегратора, включенного в обратную связь усилителя (или решать соответствующее дифференциальное уравнение в бортовом компьютере), если динамическая ошибка по скорости при включении ИО будет не более заданного в блоке 12 порога по угловой скорости.
Вычисление скорости можно выполнять и по величине приращения угла на заданном такте работы дискретного автомата. В этом случае блок 17 может быть реализован с помощью стандартных усилителей и интеграторов, используемых для запоминания значения угла на данном такте.
Блок определения изменения знака приращения угла 18 может быть выполнен на основе стандартных усилителей и интеграторов для запоминания величин значения угла с целью вычисления приращения угла на данном такте работы и для запоминания знака приращения угла, а также стандартных схем сравнения и реле для определения момента изменения знака приращения угла и выдачи команд в блок коммутации 22.
Блоки коммутации 22, 29, 30 могут быть выполнены на основе стандартных реле с нормально замкнутыми и разомкнутыми контактами.
Блоки 23, 24, 26 могут быть реализованы на основе стандартных усилителей, схем сравнения и реле с нормально замкнутыми и разомкнутыми контактами.
Блок формирования команд 31 может быть реализован на основе стандартных усилителей, схем сравнения и реле с нормально замкнутыми и разомкнутыми контактами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДИНАМИЧЕСКИМ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2144691C1 |
| СПОСОБ УПРАВЛЕНИЯ ДИНАМИЧЕСКИМ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2144692C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА | 2003 |
|
RU2270790C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА ВОКРУГ ЦЕНТРА МАСС ПРИ ПОДДЕРЖАНИИ ОРИЕНТАЦИИ | 2009 |
|
RU2412872C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЦЕНТРА МАСС КОСМИЧЕСКОГО КОРАБЛЯ ПРИ ПРИЧАЛИВАНИИ | 2011 |
|
RU2482033C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА ПРИ ПОДДЕРЖАНИИ ОРИЕНТАЦИИ | 2008 |
|
RU2376215C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА | 2003 |
|
RU2270789C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРИЧАЛИВАНИЕМ | 2002 |
|
RU2225811C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА ВОКРУГ ЦЕНТРА МАСС ДЛЯ ПОДДЕРЖАНИЯ ОРИЕНТАЦИИ ПРИ ДЕЙСТВИИ ВОЗМУЩАЮЩЕГО УСКОРЕНИЯ | 2009 |
|
RU2410296C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ РЕГУЛЯРНОЙ ПРЕЦЕССИИ (ВАРИАНТЫ) | 1999 |
|
RU2153446C1 |
Изобретение относится к области автоматики и может быть использовано для управления движением космических аппаратов. Техническим результатом является повышение точности дискретных автоматов стабилизации с одновременным улучшением качества переходных процессов. Устройство содержит блоки коммутации, генераторы, блоки формирования зон нечувствительностей, управляемые блоки формирования зон нечувствительностей, блок вычисления текущей скорости, блок готовности ориентации, блок определения изменения знака приращения угла, блоки формирования импульсов и команд, блок вычисления импульсов, блок определения изменения знака вычисленного угла и др. 3 ил.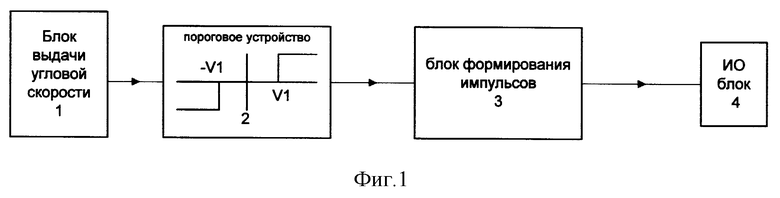
Устройство формирования управляющих воздействий, состоящее из блока выдачи угла, первого блока формирования зоны нечувствительности, первого управляемого блока формирования зоны нечувствительности, блока формирования импульсов и исполнительных органов (ИО), причем выход блока выдачи угла через последовательно включенные первый блок формирования зоны нечувствительности и первый управляемый блок формирования зоны нечувствительности соединен с блоком формирования импульсов, отличающееся тем, что в него введены дополнительно второй, третий и четвертый блоки формирования зоны нечувствительности, второй управляемый блок формирования зоны нечувствительности, генератор заданной частоты импульсов с заданной частотой, генератор заданной частоты импульсов, предназначенный для включения ИО на время, генератор выдачи импульсов в ответ на величину превышения угла заданного порогового значения, пропорциональных величинам скорости и угла, блок выдачи импульсов, длительности которых определяется суммой программной и текущей скоростей, пятый блок вычисления импульсов, первый, второй и третий блоки коммутации, блок формирования команд, блок вычисления текущей скорости, блок определения изменения знака приращения угла, блок определения готовности ориентации, блок запоминания и вычисления угла, блок определения изменения знака вычисленного угла, причем выход блока выдачи угла подключен к блоку вычисления текущей скорости, блоку определения изменения знака приращения угла, к генератору заданной частоты импульсов,
предназначенному для включения ИО на время, и генератору выдачи импульсов в ответ на величину превышения угла заданного порогового значения, пропорциональных величине скорости и угла, к блоку определения готовности ориентации и к блоку запоминания и вычисления угла, а через второй блок коммутации к вновь введенным второму, третьему и четвертому блокам формирования зоны нечувствительности, выход блока вычисления текущей скорости подключен к первому и второму управляемым блокам формирования зоны нечувствительности, к генератору выдачи импульсов в ответ на величину превышения угла заданного порогового значения, пропорциональных величинам скорости и угла, блоку выдачи импульсов, длительность которых определяется суммой программной скорости и текущей скорости, и пятому блоку вычисления импульсов, а также к блоку определения готовности ориентации, выход второго блока формирования зоны нечувствительности через последовательно включенные генератор заданной частоты импульсов с заданной частотой и первый блок коммутации, к второму входу которого подключен выход блока определения изменения знака приращения угла, соединен с исполнительными органами, выход третьего блока формирования зоны нечувствительности через генератор заданной частоты импульсов, предназначенный для включения ИО на время, соединен с первым блоком коммутации, выход четвертого блока формирования зоны нечувствительности через генератор выдачи импульсов в ответ на величину превышения угла заданного порогового значения, пропорциональных величинам скорости и угла, соединен с исполнительными органами, второй выход первого управляемого блока формирования зоны нечувствительности соединен с блоком формирования команд, выход которого подключен к блоку запоминания и вычисления угла, выход блока определения готовности ориентации соединен с вторым и третьим блоками коммутации и блоком
формирования команд, выход блока запоминания и вычисления угла соединен с блоком определения изменения знака вычисленного угла и с блоком выдачи импульсов, длительность которых определяется суммой программной и текущей скоростей, выход которого соединен с исполнительными органами, выходы блока определения изменения знака вычисленного угла соединены с входом блока запоминания и вычисления угла, а через последовательно включенные второй управляемый блок формирования зоны нечувствительности и пятый блок вычисления импульсов - с исполнительными органами, а также с вторым и третьим блоками коммутации, выход блока формирования импульсов через третий блок коммутации соединен с исполнительными органами.
| Релейный регулятор | 1989 |
|
SU1695263A1 |
| РЕЛЕЙНАЯ СИСТЕМА УПРАВЛЕНИЯ | 1992 |
|
RU2033988C1 |
| УСТРОЙСТВО КООРДИНИРОВАННОГО РЕГУЛИРОВАНИЯ УГЛОВОГО БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
RU2047888C1 |
| Самонаклад книжных блоков | 1956 |
|
SU108969A1 |
| US 4635191 A, 06.01.1987 | |||
| KR 9404571 B1, 25.05.1994. | |||

