Область техники.
Изобретение относится к средствам сигнализации и управления для широкого класса человеко-машинных систем, в т.ч. для пилотируемых подвижных объектов, таких как водные, подводные и воздушные суда, космические корабли и т.д.
Предшествующий уровень техники.
Авиационные происшествия, как правило, являются следствием сложных и аварийных ситуаций, обусловленных неисправностями объекта и его систем, внешними воздействиями и ошибками человека-оператора, как правило, в условиях дефицита времени на принятие решения. Трудность принятия решения в таких ситуациях, называемых далее особыми, определяется большим объемом информации, который необходимо переработать за короткое время, и большим, достигающим десятков тысяч, количеством возможных особых ситуаций.
Анализ материалов расследования авиационных происшествий отечественных гражданских самолетов с газотурбинными двигателями 1-3 классов за последние 10 лет показывает, что большинство из них (84%) происходили в результате отклонений от нормы в работе экипажа по выдерживанию параметров полета и по работе с системами самолета.
В таких ситуациях необходимо предупредить выход пилотируемого летательного аппарата на критические режимы работы путем оказания своевременной помощи экипажу в принятии решения по парированию сложившейся ситуации, а если экипаж не выполняет предписанных ему команд, то и предотвратить выход пилотируемого летательного аппарата на критические режимы работы с использованием средств автоматизации управления. Под критическими режимами работы понимаются режимы, ведущие к полной, либо частичной утрате системой выполняемых функций, либо утрате объекта, либо утрате объекта и гибели экипажа.
Известна система полуавтоматического управления самолетом, в которой измеряются параметры положения и движения самолета, параметры технического состояния самолета, параметры положения органов управления самолетом (Доброленский Ю. П. и др. Методы инженерно-психологических исследований в авиации. - М.: Машиностроение, 1975 г., с. 34). В системе осуществляется формирование командных сигналов, которые поступают на командный прибор и служат для управления самолетом на определенных режимах: стабилизация высоты, скорости и т.д.
Известно устройство управления, предназначенное для предотвращения потери сознания летчика, путем ограничения величины и времени действия перегрузки. В этом устройстве измеряются параметры движения и положения самолета и формируются сигналы управления для предотвращения выхода параметров самолета за ограничения (Патент США N 4821982, МКИ В 64 С 13/16 НКИ 244-76К).
Известна система предупреждения критических режимов пилотируемого летательного аппарата, содержащая измеритель параметров положения и движения пилотируемого летательного аппарата, измеритель параметров технического состояния пилотируемого летательного аппарата, измеритель параметров положения органов управления пилотируемого летательного аппарата, средства индикации и сигнализации, автопилот, последовательно соединенные блок определения текущих опасных факторов, входы которого соединены с измерителем параметров положения и движения пилотируемого летательного аппарата, измерителем параметров технического состояния пилотируемого летательного аппарата, измерителем параметров положения органов управления пилотируемого летательного аппарата, формирователь показателя сложности управления и формирователь команд управления, второй вход которого соединен со вторым выходом формирователя показателя сложности управления, а выход - со средствами индикации и сигнализации (Патент RU 2114456 С1, МПК G 05 B 13/00 G 05 D 1/00).
В этой системе не решается задача предотвращения выхода пилотируемого летательного аппарата на критические режимы в случаях, когда экипаж по каким-либо причинам не выполняет предписанных ему команд.
Сущность изобретения.
В основу изобретения положено решение задачи обеспечения безопасности полета путем предотвращения выхода пилотируемого летательного аппарата на критические режимы полета с использованием средств автоматизации управления.
Поставленная цель достигается тем, что в систему обеспечения безопасности полета пилотируемого летательного аппарата, содержащую измеритель параметров положения и движения пилотируемого летательного аппарата, измеритель параметров технического состояния пилотируемого летательного аппарата, измеритель параметров положения органов управления пилотируемого летательного аппарата, средства индикации и сигнализации, автопилот, последовательно соединенные блок определения текущих опасных факторов, входы которого соединены с измерителем параметров положения и движения пилотируемого летательного аппарата, измерителем параметров технического состояния пилотируемого летательного аппарата, измерителем параметров положения органов управления пилотируемого летательного аппарата, формирователь показателя сложности управления и формирователь команд управления, второй вход которого соединен со вторым выходом формирователя показателя сложности управления, а выход - со средствами индикации и сигнализации, введены формирователь текущих ограничений параметров движения, формирователь режимов автоматического управления, формирователь условий срабатывания автоматического управления и формирователь сигналов управления, входы которого соединены с формирователем режимов автоматического управления, формирователем текущих ограничений параметров движения, формирователем условий срабатывания автоматического управления и измерителем параметров положения и движения пилотируемого летательного аппарата, а выход - с автопилотом, причем вход формирователя текущих ограничений параметров движения соединен с блоком определения текущих опасных факторов, а выход - с формирователем условий срабатывания автоматического управления, другие входы которого соединены с формирователем режимов автоматического управления и измерителем параметров положения и движения пилотируемого летательного аппарата, вход формирователя режимов автоматического управления соединен с формирователем команд управления, при этом формирователь текущих ограничений диаметров движения выполнен с возможностью учета технического состояния пилотируемого летательного аппарата, формирователь условий срабатывания автоматического управления и формирователь сигналов управления выполнены с возможностью предотвращения выхода параметров движения пилотируемого летательного аппарата на ограничения и учета технического состояния пилотируемого летательного аппарата.
Сведения, подтверждающие возможность осуществления изобретения.
Возможность осуществления изобретения иллюстрируется на примере системы обеспечения безопасности полета транспортного самолета. Этот пример не должен рассматриваться ни как ограничивающий объем изобретения, ни как предпочтительная для всех случаев форма его реализации.
Блок-схема устройства представлена на чертеже.
Система содержит измеритель параметров положения и движения пилотируемого летательного аппарата 1, измеритель параметров технического состояния пилотируемого летательного аппарата 2, измеритель параметров положения органов управления пилотируемого летательного аппарата 3, средства индикации и сигнализации 4, автопилот 5, блок 6 определения текущих опасных факторов, формирователь показателя сложности управления 7, формирователь команд управления 8, формирователь текущих ограничений параметров движения 9, формирователь режимов автоматического управления 10, формирователь условий срабатывания автоматического управления 11 и формирователь сигналов управления 12.
Блок 1 может включать бортовые датчики полетной информации высоты, скорости, углов тангажа, крена, курса и атаки, угловой скорости, перегрузки и т. д. , а также бортовые датчики параметров положения и движения самолета (летательного аппарата) относительно внешних объектов (аэродромов, целей и т.д.) (не показаны).
Блок 2 может включать бортовые датчики исправности систем самолета; силовой установки, гидросистем, системы управления и т.д. (не показаны).
Блок 3 может включать датчики положения: ручки управления самолетом, ручек управления двигателем, шасси и т.д. (не показаны).
Блок 4 может включать индикатор и речевой информатор, например, фирм Colling либо Sextant, либо Honeywel 1 (не показаны).
Блоки 6-12 - вычислители на базе, например, процессора типа Intel 276, либо Intel 376.
Блок 6 содержит формирователь 13 резервов времени до выхода параметров движения самолета на ограничения, блок 14 памяти опорных значений параметров положения и движения самолета, первый компаратор 15, регистратор 16 текущих опорных значений параметров положения и движения самолета, блок 17 памяти опорных значений параметров технического состояния самолета, второй компаратор 18, регистратор 19 текущих опорных значений параметров технического состояния самолета, блок 20 памяти опорных значений параметров положения органов управления самолета, третий компаратор 21, регистратор 22 текущих опорных параметров положения органов управления самолета, блок 23 памяти опорных значений резервов времени до выхода параметров движения самолета на ограничения, четвертый компаратор 24, регистратор 25 текущих опорных значений резервов времени - до выхода параметров движения самолета на ограничения, блок 26 памяти опасных факторов, пятый компаратор 27, блок 28 запоминания текущих опасных факторов.
Блок 7 содержит блок 29 памяти априорных вероятностей ошибки экипажа, блок 30 памяти условных вероятностей ошибки экипажа при действии каждого опасного фактора при условии ложности и истинности гипотезы о возможности ошибки экипажа и вычислитель 31 показателя сложности управления.
Блок 8 содержит блок 32 памяти пороговых значений приращений вероятности ошибки экипажа, блок 33 памяти управлений, формирователь 34 порогового значения для величины приращения вероятности ошибки экипажа и вычислитель 35 сигнала управления для перевода пилотируемого летательного аппарата в состояние, характеризующееся допустимым уровнем показателя сложности управления.
Блок 9 содержит блок памяти ограничений параметров движения и управлений 36, пятый компаратор 37 и регистратор текущих ограничений параметров движения и управлений 38.
Блок 10 содержит блок памяти команд управления движением 39, шестой компаратор 40 и регистратор режимов автоматического управления 41.
Блоки 14,15, 16 соединены последовательно. Второй вход блока 15 соединен с выходом блока 1, который также подключен ко входу блока 13. Блоки 17,18,19 соединены последовательно. Второй вход блока 18 соединен с блоком 2. Блоки 20,21,22 соединены последовательно, второй вход блока 21 соединен с блоком 3. Блоки 23,24,25 соединены последовательно. Второй вход блока 24 соединен с блоком 13. Блоки 26,27,28 соединены последовательно. Другие входы блока 27 соединены с блоками 16,19,22,25. Выход блока 28 соединен со входами блоков 37,29,30,31. Другие входы блока 31 соединены с блоками 29,30. Входы блока 35 соединены с блоками 33,34 и вторым выходом блока 31. Первый выход блока 35 соединен с блоками 4,40, второй выход - с блоком 33. Входы блока 34 соединены с первым выходом блока 31 и блоком 32. Выход блока 36 соединен с блоками 37,38. Второй вход блока 38 соединен с блоком 37. Выход блока 38 соединен с первым входом блока 11 и вторым входом блока 12. Блок 39 соединен с блоком 40, выход которого соединен с блоком 41. Выход блока 41 соединен с первым входом блока 12 и вторым входом блока 11, выход которого соединен с третьим входом блока 12. Выход блока 1 соединен с третьим входом блока 11 и четвертым входом блока 12, выход которого соединен с блоком 5.
Далее описана работа устройства применительно к управлению самолетом. Блок 1 измеряет параметры положения и движения самолета: высоту, составляющие скорости, углы тангажа, крена, курса атаки, составляющие ускорения, составляющие угловой скорости и т.д.
Блок 2 определяет параметры технического состояния самолета: состояние двигателей, исправности гидросистем, системы управления и т.д., наличие пожара, обледенения и т.д.
Блок 3 измеряет параметры положения органов управления самолета: + ручки управления самолета, ручек управлениями двигателями, педалей управления рулем направления, ручки управления уборкой-выпуском шасси, закрылков и т.д.
В блоке 13 вычисляются резервы времени до выхода параметров движения самолета на заданные ограничения: по высоте, скорости, перегрузке, углу атаки и т.д.
Резерв времени вычисляется по формуле:
где Aгр - заданные граничные значения параметра А;
A' - скорость изменения параметра А (в случае, если А' не измеряется, она вычисляется в блоке по измеряемым параметрам).
Например, для высоты полета
где Hоп - значение опасной высоты,
Hт - измеренное значение высоты,
Vy - вертикальная скорость.
В блоке 14 хранятся опорные значения ряда параметров положения и движения самолета, таких как высота, скорость, угол крена и т.д.
Например: для крена опорные значения равны: (Г0,Г1)= [0,30] град., (Г1, Г2)= [30,45] град., (Г3,Г4)=[45,70,] град.
для высоты (Н0,Н1)= [0,100]м, (H1,H2)=[100,600] м.
В блоке 15 осуществляется сравнение текущего значения параметра из блока 1 с его опорным значением из блока 14 и формируется текущее опорное значение, которое поступает в блок 16, где запоминается.
Например: при 30 град. > > 0 град. тек.оп равно (Г0,Г1);
при 100 < Н < 600 Нтек.оп равно (Н1,Н2).
В блоке 17 хранятся опорные значения ряда параметров технического состояния пилотируемого летательного аппарата.
Например, для двигателей в качестве опорных значений используются сигналы: 1-й двигатель выключен (Д1), 2-й двигатель выключен (Д2) и т.д.
В блоке 18 осуществляется сравнение параметров технического состояния из блока 2 с опорными значениями из блока 17 и формирование текущих опорных значений, которые поступают в блок 19.
Например, при выключении 1-го двигателя текущее опорное значение (Дтек. опорное) равно Д1.
В блоке 20 хранятся опорные значения параметров положения органов управления пилотируемым летательным аппаратом.
В блоке 21 осуществляется сравнение измеренных параметров положения органов управления пилотируемым летательным аппаратом из блока 3 с их опорными значениями из блока 20 и формируются текущие опорные значения параметров положения органов управления пилотируемым летательным аппаратом, которые поступают в блок 22, где запоминаются. Например, если шасси убрано, текущее опорное значение шасси равно Ш1.
В блоке 23 хранятся опорные значения резервов времени.
Например, для резерва времени по высоте (Тн) опорные значения равны: (Тн0,Тн1)=[0,1]сек,(Тн1,Тн2)=(1,3)сек(Тн2,Тн3)=(3,5)сек.
В блоке 24 осуществляется сравнение текущих значений резервов времени с опорными значениями и формируются текущие опорные значения резервов времени. Например, для высоты полета, если текущее значение резерва временило высоте меньше 5 сек и больше 3 сек, то оно записывается в виде:
Тн тек.оп=(Тн2,Тн3).
В блоке 25 запоминаются текущие опорные значения резервов времени параметров движения пилотируемого летательного аппарата.
В блоке 26 хранятся параметры, характеризующие опасные факторы системы "экипаж - пилотируемый летательный аппарат".
Опасный фактор представляет собой такое сочетание опорных значений параметров состояния пилотируемого летательного аппарата, которое представляет определенную сложность управления (опасность). Например, высота полета меньше шестисот метров, и шасси убрано, и отказывает один двигатель, то указанный опасный фактор имеет вид:
ОФ1-(Н1Н2,Д1Ш1)
где Н1Н2 - опорное значение высоты, соответствующее интервалу 100 < Н < 600;
Д1 - опорное значение состояния двигателя, соответствующее выключению левого двигателя,
Ш1 - опорное значение состояния шасси, соответствующее положению шасси убрано.
Если при наборе высоты и выключении одного двигателя ручка управления двигателем на стоп не установлена, то это является также опасным фактором:
ОФ2=(Н1Н2,Ш1,Д1,РД11),
где РД11 - опорное значение положения РУД 1-го двигателя, соответствующее любому положению РУД, кроме положения стоп.
Если при наборе высоты высота меньше 600 метров, шасси убрано и вертикальная скорость меньше требуемой скорости набора высоты либо это скорость снижения (Vy<0), то это также является опасным фактором:
ОФ3=(Н1Н2,Vyo,Ш1)
где Vyo - опорное значение вертикальной скорости соответствующее интервалу Vy < Vyo.
Если имеет место действие всех указанных факторов, то текущая полетная ситуация (ТПС1) имеет вид:
TПС1-(H1Н2,Ш1,Д1,РД11,Vyo).
B блоке 27 осуществляется сравнение текущих опорных значений параметров, поступающих с блоков 16,19,22,25, с параметрами, характеризующими опасные факторы и хранящимися в блоке 22, и выделяются параметры, характеризующие текущие опасные факторы.
В рассматриваемом примере это ОФ1, ОФ2, ОФЗ. Указанные параметры (текущие опасные факторы) поступают в блок запоминания 28, где они хранятся.
В блоке памяти 29 хранятся априорные значения вероятностей ошибки экипажа. Для этапа набора высоты указанное значение, определенное экспертным путем, равно
Рно.
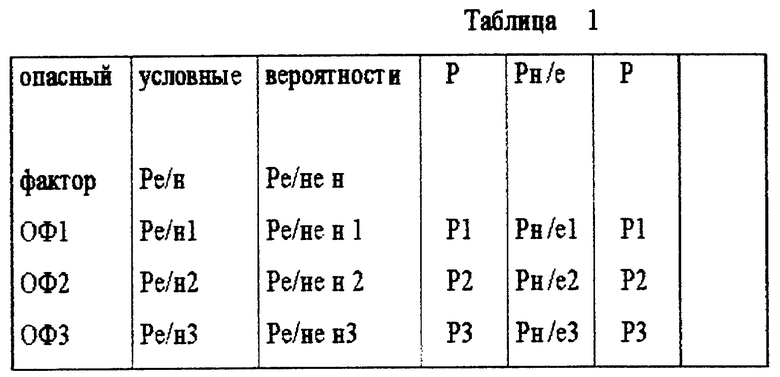
В блоке памяти 30 хранятся также определенные экспертным путем значения условных вероятностей ошибки экипажа при действии каждого опасного фактора системы "экипаж-пилотируемый летательный аппарат" при условии истинности (Ре/н) либо ложности (Ре/не н) гипотезы о возможности ошибки экипажа.
Для рассматриваемых в примере опасных факторов указанные вероятности сведены в таблицу 1.
В вычислителе 31 осуществляется расчет апостериорной вероятности ошибки экипажа в полетной ситуации, характеризуемой текущими опасными факторами, с использованием формулы Байеса.
Выполняются следующие вычисления:
- первичное ранжирование текущих опасных факторов путем вычисления разности
ΔPi= P
где i - номер опасного фактора.
Для рассматриваемого примера приоритетная последовательность имеет вид:
ОФ3, ОФ1, ОФ2(Р3 > Р1 > P2);
- вычисление апостериорной вероятности ошибки экипажа для каждого текущего опасного фактора в приоритетной последовательности, причем апостериорная вероятность на текущем шаге используется в качестве априорной на последующем:
где i=1-N - номер в приоритетной последовательности, Pн/е o=Pно.
Для рассматриваемого примера Рн/е2 > Рн/е1 > Рн/е3.
Значение апостериорной вероятности ошибки экипажа на N-м шаге (i=N), где N равно количеству опасных факторов, характеризует вероятность ошибки экипажа в данной полетной ситуации, и показатель сложности управления, для рассматриваемого примера
Рн/е=Рн/е2.
Из блока 31 выдаются:
- в блок 34 - показатель сложности управления (1-й выход);
в блок 35 - значения апостериорной вероятности ошибки экипажа для каждого текущего опасного фактора в последовательности первичной ранжировки (2-й выход).
В блоке памяти 32 хранятся пороговые значения для величин приращений вероятности ошибки экипажа (U32-1, U32-2, U32-3,U32-4) и соответствующие им уровни (U32-11, U32-21, U32-31, U32-41), которые поступают в блок 34.
В блоке памяти 33 хранятся команды для всех опасных факторов. Для указанных опасных факторов команды имеют следующий вид:
для первого опасного фактора команда отсутствует,
для второго опасного фактора - РУД НА СТОП,
для третьего опасного фактора - ПРЕКРАТИ СНИЖЕНИЕ.
Из блока 33 в блок 35 выдаются команды, соответствующие значимым опасным факторам, номера которых поступают в блок 33 из блока 35.
В блоке 34 осуществляется формирование порогового значения для величины приращения вероятности ошибки экипажа (Р н2), которое поступает в блок 35 в виде ступенчатой функции от величины показателя сложности управления, поступающего с первого выхода блока 31 (табл.2), причем величина "ступеней" задается с выхода блока 32:
Рн 2=U32-i при Рн/е < U32-i1, где i=1-4. (3)
В блоке 35 осуществляется формирование команд, поступающих в блок 4. Осуществляются следующие вычисления:
- вторичная ранжировка текущих опасных факторов путем вычисления и запоминания приращения величины вероятности ошибки экипажа для каждого текущего опасного фактора по сигналам со второго выхода блока 31, в виде:
▿P
где i - номер текущего опасного фактора;
j - номер предшествовавшего опасного фактора, определенного по (формуле (1),
для первого по приоритету опасного фактора величина приращения вычисляется по отношению к априорному значению вероятности ошибки экипажа:
▿P
где i - номер первого по приоритету опасного фактора.
Для рассматриваемого примера Pi приведены в табл. 1. Приоритетная последовательность по результатам вторичной ранжировки имеет вид: ОФЗ, ОФ1, ОФ2,
так как ▿P3 > ▿P1 > ▿P2, поскольку Pн/е < U30-31 то Рн2-U30-3;
- определение номеров значимых опасных факторов осуществляется путем сравнения полученных величин приращений вероятности ошибки экипажа для каждого опасного фактора (▿Pн/e) с пороговым значением (Рн2) с блока 34, для значимых опасных факторов величина приращения вероятности ошибки экипажа должна превышать указанное пороговое значение, указанные номера опасных факторов (2-й выход блока 35) выдаются в блок 33.
В рассматриваемом примере значимым является третий опасный фактор (ОФЗ).
▿P3= ▿P
- формирование команд, для выдачи в блок 4, осуществляется путем организации последовательности из команд, поступивших из блока 33, приоритетность в которой определяется результатами вторичной ранжировки.
В рассматриваемом примере это команда, соответствующая третьему опасному фактору: "прекрати снижение".
Из блока 35 выдаются:
- в блоки 4,40 команды управления в последовательности вторичной ранжировки (1-й выход);
- в блок 33 номера опасных факторов, для которых приращение величины вероятности ошибки экипажа превышает пороговый уровень (2-й выход).
В блоке 36 хранятся величины ограничений параметров движения управлений самолета, например продольной NX и вертикальной Ny перегрузок, угла атаки, скорости полета и т.д. Указанные величины ограничений упорядочены в соответствии с опасными факторами, характеризующими техническое состояние самолета, таким образом, что опасному фактору, характеризующему определенное техническое состояние, соответствует ограничение, им обусловленное. Например, отказу двигателя соответствуют ограничения продольной перегрузки, неисправности гидросистемы соответствуют ограничения по углу атаки и максимальной скорости и т.д.
В блоке 37 сравниваются номера текущих опасных факторов с номерами величин ограничений, соответствующих опасным факторам, характеризующим техническое состояние самолета, и выдаются в блок 38 номера величин ограничений, соответствующих текущим опасным факторам, характеризующим техническое состояние самолета.
В блоке 38 запоминаются величины ограничений, соответствующих текущим опасным факторам, характеризующим техническое состояние самолета.
В блоке 39 хранятся команды управления движением пилотируемого летательного аппарата.
В блоке 40 осуществляется сравнение команд управления движением пилотируемого летательного аппарата с блока 39 с первой командой с блока 35. Если первая команда с блока 35 совпадает с одной из команд, хранящихся в блоке 39, то она поступает в блок 41, где запоминается.
В рассматриваемом примере это команда "прекрати снижение", соответствующая режиму автоматического управления "увод с опасной высоты".
В блоке 11 формируются условия включения режима автоматического управления, который задается с блока 41. Условия включения для режима автоматического управления "увод с опасной высоты" имеют вид:
Hув=Hоп+Т•H;
где Hув - высота включения режима автоматического управления "увод с опасной высоты";
H - скорость сближения;
Hоп - опасная высота, задаваемая в зависимости от режима полета с блока 1;
Т - время упреждения, задаваемое в зависимости от режима полета и действующих ограничений с блока 38.
В блоке 12 формируются сигналы управления самолетом в продольном и боковых каналах, а также сигналы управления силовой установкой, поступающие на автопилот 5, в соответствии с режимом управления с блока 41 и ограничениями с блока 38.
В рассматриваемом примере это сигнал управления продольным движением в виде стабилизации заданного тангажа:
U = i1•(ϑ3-ϑ),
где i1 - коэффициент, зависящий от режима полета с блока 1;
ϑ3 - заданный тангаж в зависимости от действующих ограничений с блока 38;
ϑ - текущий тангаж,
и сигнал управления автоматом тяги в виде стабилизации заданной скорости;
U=i2•(Vзад-V),
где i2 - коэффициент, зависящий от режима полета с блока 1;
Vзад - заданная скорость в зависимости от действующих ограничений с блока 38;
V - текущая скорость.
Полунатурное моделирование предложенной системы применительно к легкому самолету (40 т) на этапах набора высоты, маршрутного полета, траекторного маневрирования в условиях действия одиночных и групповых отказов показало возможность снижения показателя аварийности, обусловленного ошибками экипажа, в 1,5-2 раза.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ПРЕДУПРЕЖДЕНИЯ КРИТИЧЕСКИХ РЕЖИМОВ РАБОТЫ СИСТЕМЫ ОПЕРАТОР - ОБЪЕКТ | 1996 |
|
RU2114456C1 |
| Способ и система предупреждения столкновения пилотируемого летательного аппарата с земной поверхностью, многофункциональный, маневренный самолет с системой предупреждения столкновения с земной поверхностью | 2017 |
|
RU2664090C1 |
| ОПТИКОЭЛЕКТРОННАЯ ПРИЦЕЛЬНАЯ СИСТЕМА САМОЛЕТА | 1999 |
|
RU2158406C1 |
| МНОГОРЕЖИМНЫЙ САМОЛЕТ ИНТЕГРАЛЬНОЙ АЭРОДИНАМИЧЕСКОЙ КОМПОНОВКИ | 1998 |
|
RU2138423C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТОВ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2370416C1 |
| СИСТЕМА ГЕОФИЗИЧЕСКОГО ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ КОСМИЧЕСКИХ АППАРАТОВ | 2012 |
|
RU2508229C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ НЕСАНКЦИОНИРОВАННОГО ИСПОЛЬЗОВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2002 |
|
RU2228543C2 |
| ПРИЦЕЛЬНАЯ СИСТЕМА САМОЛЕТА | 1999 |
|
RU2150068C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| ОПТИКОЭЛЕКТРОННАЯ ПРИЦЕЛЬНАЯ СИСТЕМА САМОЛЕТА | 1999 |
|
RU2158407C1 |

Изобретение предназначено для обеспечения безопасности полета пилотируемого летательного аппарата. Технический результат заключается в предотвращении выхода летательного аппарата на критические режимы полета с использованием автоматических средств управления. Система содержит измеритель параметров положения и движения пилотируемого летательного аппарата, измеритель параметров технического состояния пилотируемого летательного аппарата, измеритель параметров положения органов управления пилотируемого летательного аппарата, средства индикации и сигнализации, автопилот, последовательно соединенные блок определения текущих опасных факторов, формирователь показателя сложности управления и формирователь команд управления, формирователь текущих ограничений параметров движения, формирователь режимов автоматического управления, формирователь условий срабатывания автоматического управления и формирователь сигналов управления, причем формирователь текущих ограничений параметров движения выполнен с возможностью учета технического состояния пилотируемого летательного аппарата, формирователь условий срабатывания автоматического управления и формирователь сигналов управления выполнены с возможностью предотвращения выхода параметров движения пилотируемого летательного аппарата на ограничения и учета технического состояния пилотируемого летательного аппарата. 1 ил., 2 табл.
Система обеспечения безопасности полета пилотируемого летательного аппарата, содержащая измеритель параметров положения и движения пилотируемого летательного аппарата, измеритель параметров технического состояния пилотируемого летательного аппарата, измеритель параметров положения органов управления пилотируемого летательного аппарата, средства индикации и сигнализации, автопилот, последовательно соединенные блок определения текущих опасных факторов, входы которого соединены с измерителем параметров положения и движения пилотируемого летательного аппарата, измерителем параметров технического состояния пилотируемого летательного аппарата, измерителем параметров положения органов управления пилотируемого летательного аппарата, формирователь показателя сложности управления и формирователь команд управления, второй вход которого соединен со вторым выходом формирователя показателя сложности управления, а выход - со средствами индикации и сигнализации, отличающаяся тем, что в нее введены формирователь текущих ограничений параметров движения, формирователь режимов автоматического управления, формирователь условий срабатывания автоматического управления и формирователь сигналов управления, входы которого соединены с формирователем текущих ограничений параметров движения, формирователем режимов автоматического управления, формирователем условий срабатывания автоматического управления и измерителем параметров положения и движения пилотируемого летательного аппарата, а выход - с автопилотом, причем вход формирователя текущих ограничений параметров движения соединен с блоком определения текущих опасных факторов, а выход - с формирователем условий срабатывания автоматического управления, другие входы которого соединены с формирователем режимов автоматического управления и измерителем параметров положения и движения пилотируемого летательного аппарата, вход формирователя режимов автоматического управления соединен с формирователем команд управления, при этом формирователь текущих ограничений параметров движения выполнен с возможностью учета технического состояния пилотируемого летательного аппарата, формирователь условий срабатывания автоматического управления и формирователь сигналов управления выполнены с возможностью предотвращения выхода параметров движения пилотируемого летательного аппарата на ограничения и учета технического состояния пилотируемого летательного аппарата.
| СПОСОБ И УСТРОЙСТВО ПРЕДУПРЕЖДЕНИЯ КРИТИЧЕСКИХ РЕЖИМОВ РАБОТЫ СИСТЕМЫ ОПЕРАТОР - ОБЪЕКТ | 1996 |
|
RU2114456C1 |
| US 4821982 A, 18.04.1989 | |||
| US 4775116 A, 04.10.1988 | |||
| ДОБРОЛЕНСКИЙ Ю.П | |||
| и др | |||
| Методы инженерно-психологических исследований в авиации.- М.: Машиностроение, 1975, с.34. | |||

