Группа изобретений относится к средствам измерения, сигнализации и управления для широкого класса самолетов, вертолетов, беспилотных летательных аппаратов и, в частности, для маневренных самолетов.
Значительное число авиационных происшествий с исправными воздушными судами различного назначения связано со столкновением с землей. Сложность предотвращения столкновения с землей обусловлена различными факторами: ошибками экипажа, отсутствием совершенных датчиков впереди лежащего рельефа местности, погрешностями измерителей. Особенно эта задача сложна для маневренных самолетов.
Известна система GCAS (ground collision avoidance system) - система предупреждения столкновения с землей для высокоманевренных самолетов. (Joint development of an auto GCAS, Donald E. Swihart, Artur F. Barfield, Flight Dinamics Directorate Wright Laboratory AFB OH 454333, Stockholm, Sweden).
Известна группа изобретений «Способ предупреждения столкновения летательного аппарата с землей и устройство на его основе» патент RU 2 262 746 от 10.06.2004 г.
В этих системах осуществляется: мониторинг («информационное сканирование») рельефа местности, определяется его профиль в упрежденной полосе по линии пути летательного аппарата, осуществляется прогнозирование траектории полета ЛА в этой полосе.
Недостатком этих систем является низкая точность прогнозирования траектории полета, что снижает достоверность выдаваемых сигналов. Практика показывает большую вероятность выдачи ложных предупреждений (до 73%). Эта проблема усугубляется для маневренных летательных аппаратов.
Известна «Система предотвращения столкновения с землей» патент US 4,924,401 от 08.05. 1990 г.
В этой системе вычисляется потеря высоты при включении автоматического увода от поверхности земли, на основе которой вычисляется высота включения автоматического увода. При этом отсчет высоты включения автоматического увода осуществляется от некоторого уровня, который задается заранее и должен превышать высоту препятствий в районе полета. Это ограничивает возможности маневрирования и скрытного полета вблизи земли.
Известна «Система предотвращения столкновения с землей» патент RU 2 368 954 С2.
В этой системе определяются параметры положения и движения пилотируемого летательного аппарата, максимальная высота рельефа местности в зоне мониторинга рельефа местности, вычисляется потеря высоты при включении автоматического увода от земли, на основе которой вычисляется высота включения автоматического увода. При этом отсчет высоты включения автоматического увода осуществляется от высоты препятствий в зоне текущего маневра летательного аппарата, а потеря высоты при включении автоматического увода от земли вычисляется для заданной траектории автоматического увода. Это приводит к «ложному срабатыванию» автоматического увода от земли в условиях, когда величина потери высоты при включении автоматического увода от земли, соответствующая заданной траектории автоматического увода, больше чем потеря высоты при выполнении ЛА текущего маневра. Следствием этого является сужение зоны безопасного маневрирования ЛА вблизи земли.
Особое значение изобретение имеет для маневренных самолетов, где задача обеспечения безопасности полета решается экипажем наряду с другими задачами по управлению самолетом и его системами.
Технический результат, на достижение которого направлено изобретение, заключается в расширении области безопасного маневрирования многофункционального маневренного самолета вблизи земли и обеспечении безопасности маневрирования многофункционального маневренного самолета на предельно малых высотах.
Указанный технический результат в части способа достигается тем, что в способе предупреждения столкновения пилотируемого ЛА с земной поверхностью, при котором определяют параметры положения и движения пилотируемого летательного аппарата, определяют максимальную высоту рельефа местности в зоне мониторинга рельефа местности, вычисляют потерю высоты при включении автоматического увода, с использованием которой вычисляют высоту включения автоматического увода, формируют сигнал на включение автоматического увода и осуществляют автоматический увод от поверхности земли при снижении ЛА до высоты включения автоматического увода, согласно изобретению, задают несколько траекторий автоматического увода, вычисляют потерю высоты при включении автоматического увода для каждой траектории автоматического увода, выбирают в качестве траектории автоматического увода траекторию, на которой величина потери высоты при включении автоматического увода имеет минимальное значение, принимают в качестве величины потери высоты при включении автоматического увода это минимальное значение и корректируют выбранную траекторию увода в части вывода ЛА на высоту, превышающую максимальную высоту рельефа местности в зоне мониторинга рельефа местности.
Кроме того, задают опасную высоту, с использованием которой вычисляют высоту включения автоматического увода.
Кроме того, вычисляют величину времени оставшегося до включения автоматического увода, с учетом которой формируют и выдают предупредительную сигнализацию экипажу.
Кроме того, формируют и выдают сигнализацию экипажу о необходимости увода от поверхности земли и индикацию экипажу о направлении увода.
Кроме того, определяют исправность информационных средств, достоверность критических параметров полета, с учетом которых формируют признак готовности предупреждения столкновения с земной поверхностью, с использованием которого и после вывода ЛА на высоту большую опасной формируют и индицируют признак разрешения предупреждения столкновения с земной поверхностью, а потерю высоты при включении автоматического увода, высоту включения автоматического увода, сигнал на включение автоматического увода, сигналы индикации и сигнализации увода формируют при наличии признака разрешения предупреждения столкновения с земной поверхностью.
Кроме того, включение автоматического увода блокируется при установке экипажем величины опасной высоты, большей текущего значения высоты полета относительно максимальной высоты рельефа местности в зоне мониторинга рельефа местности.
Кроме того, сравнивают сигналы ручного и автоматического управления в продольном канале управления ЛА в процессе автоматического увода и выбирают сигнал, задающий наибольшее отклонение рулевых поверхностей ЛА на кабрирование, согласовывают сигнал автоматического управления с сигналом ручного управления, если последний был выбран, и принимают выбранный сигнал в качестве сигнала управления в продольном канале управления ЛА.
Кроме того, определяют безопасные условия полета, выводят ЛА в эти условия в процессе автоматического увода, после чего выключают автоматический увод, приводят самолет к горизонтальному полету и стабилизируют высоту полета.
Технический результат в части устройства по п. 9 формулы изобретения достигается тем, что система предупреждения столкновения пилотируемого летательного аппарата с земной поверхностью, содержащей измеритель воздушно-скоростных параметров, навигационную систему со средствами для запоминания и обработки данных рельефа местности, соединенные с управляющим вычислителем, систему автоматического управления, соединенную с измерителем воздушно-скоростных параметров, навигационной системой и управляющим вычислителем, систему дистанционного управления с датчиками положения органов ручного управления самолетом, соединенную с системой автоматического управления, средства индикации и сигнализации, соединенные с управляющим вычислителем, навигационной системой, измерителем воздушно-скоростных параметров и системой автоматического управления, при этом, управляющий вычислитель выполнен с возможностью вычисления потери высоты при включении автоматического увода и вычисления с ее использованием высоты включения автоматического увода, формирования сигнала на включение автоматического увода от поверхности земли при снижении ЛА до высоты включения автоматического увода, средства для запоминания и обработки данных рельефа местности выполнены с возможностью определения максимальной высоты рельефа местности в зоне мониторинга рельефа местности, согласно изобретению, она снабжена задатчиком опасной высоты управляемым экипажем, соединенным с управляющим вычислителем и средствами индикации и сигнализации, датчики положения органов ручного управления самолетом системы дистанционного управления соединены с системой автоматического управления, причем управляющий вычислитель выполнен с возможностью вычисления высоты включения автоматического увода с учетом величины опасной высоты, задаваемой экипажем с использованием задатчика опасной высоты, и с возможностью блокировки сигнала включения автоматического увода при установке экипажем величины опасной высоты, с использованием задатчика опасной высоты, большей текущего значения высоты полета, относительно максимальной высоты рельефа местности в зоне мониторинга рельефа местности, управляющий вычислитель также выполнен с возможностью задания нескольких траекторий автоматического увода, вычисления потери высоты при включении автоматического увода для каждой траектории автоматического увода, выбора в качестве траектории автоматического увода траектории на которой величина потери высоты при включении автоматического увода имеет минимальное значение, принятия в качестве величины потери высоты при включении автоматического увода этого минимального значения и корректировки выбранной траектории увода в части вывода ЛА на высоту превышающую максимальную высоту рельефа местности в зоне мониторинга рельефа местности, расчета величины времени оставшегося до включения автоматического увода и формирования с его учетом предупредительной сигнализации для выдачи экипажу, формирования сигналов о необходимости увода от поверхности земли и о направлении увода для сигнализации и индикации экипажу, определения исправности информационных средств, достоверности критических параметров полета, формирования с их учетом признака готовности предупреждения столкновения с земной поверхностью, с использованием которого и после вывода ЛА на высоту большую опасной формируют и индицируют признак разрешения предупреждения столкновения с земной поверхностью, а потерю высоты при включении автоматического увода, высоту включения автоматического увода, сигнал на включение автоматического увода, сигналы индикации и сигнализации увода формируют при наличии признака разрешения предупреждения столкновения с земной поверхностью, определения безопасных условий полета, формирования траектории автоматического увода с выводом ЛА в эти условия в процессе автоматического увода и выключением автоматического увода при выводе ЛА в безопасные условия полета, средства индикации и сигнализации выполнены с возможностью индикации и сигнализации: разрешения и предупреждения включения увода, о необходимости увода от поверхности земли и о направлении увода, а система автоматического управления выполнена с возможностью приведения ЛА к горизонтальному полету и стабилизации высоты полета после выключения автоматического увода, сравнения сигналов ручного и автоматического управления в продольном канале управления ЛА в процессе автоматического увода и выбора сигнала, задающего наибольшее отклонение рулевых поверхностей ЛА на кабрирование, согласования сигнала автоматического управления с сигналом ручного управления, если последний был выбран, а система дистанционного управления выполнена с возможностью принятия, в процессе автоматического увода, выбранного системой автоматического управления сигнала в качестве сигнала управления в продольном канале управления ЛА.
Указанный технический результат в части устройства по п. 10 формулы изобретения достигается тем, что многофункциональный маневренный самолет с системой предупреждения столкновения с земной поверхностью, содержащий комплексную систему управления с системой измерения воздушно-скоростных параметров, системой автоматического управления и системой дистанционного управления с датчиками положения органов ручного управления самолетом, информационно управляющую систему с вычислительной системой, средствами индикации и сигнализации, комплекс пилотажно-навигационного оборудования с навигационными датчиками и средствами для запоминания и обработки данных рельефа местности, соединенные каналами информационного обмена,, при этом, средства для запоминания и обработки данных рельефа местности и средства индикации и сигнализации соединены с вычислительной системой, система автоматического управления соединена с системой дистанционного управления и системой измерения воздушно-скоростных параметров, вычислительная система выполнена с возможностью вычисления потери высоты при включении автоматического увода и вычисления с ее использованием высоты включения автоматического увода, формирования сигнала на включение автоматического увода от поверхности земли при снижении ЛА до высоты включения автоматического увода, средства для запоминания и обработки данных рельефа местности выполнены с возможностью определения максимальной высоты рельефа местности в зоне мониторинга рельефа местности, согласно изобретению, он дополнительно оборудован задатчиком опасной высоты управляемым экипажем, и тумблером блокировки включения автоматического увода управляемым экипажем, датчики положения органов ручного управления самолетом системы дистанционного управления соединены с системой автоматического управления, а вычислительная система выполнена с возможностью вычисления высоты включения автоматического увода с учетом величины опасной высоты, задаваемой экипажем с использованием задатчика опасной высоты и с возможностью блокировки формирования сигнала включения автоматического увода при установке экипажем величины опасной высоты, с использованием задатчика опасной высоты, большей текущего значения высоты полета относительно максимальной высоты рельефа местности в зоне мониторинга рельефа местности, вычислительная система также выполнена с возможностью задания нескольких траекторий автоматического увода, вычисления потери высоты при включении автоматического увода для каждой траектории автоматического увода, выбора в качестве траектории автоматического увода траектории на которой величина потери высоты при включении автоматического увода имеет минимальное значение, принятия в качестве величины потери высоты при включении автоматического увода этого минимального значения и корректировки выбранной траектории увода в части вывода ЛА на высоту, превышающую максимальную высоту рельефа местности в зоне мониторинга рельефа местности, расчета величины времени оставшегося до включения автоматического увода и формирования с его учетом предупредительной сигнализации для выдачи экипажу, формирования сигналов о необходимости увода от поверхности земли и о направлении увода для сигнализации и индикации экипажу, определения исправности информационных средств, достоверности критических параметров полета, формирования с их учетом признака готовности предупреждения столкновения с земной поверхностью, с использованием которого и после вывода ЛА на высоту большую опасной формируют и индицируют признак разрешения предупреждения столкновения с земной поверхностью, а потерю высоты при включении автоматического увода, высоту включения автоматического увода, сигнал на включение автоматического увода, сигналы индикации и сигнализации увода формируют при наличии признака разрешения предупреждения столкновения с земной поверхностью, определения безопасных условий полета, формирования траектории автоматического увода с выводом ЛА в эти условия в процессе автоматического увода и выключением автоматического увода при выводе ЛА в безопасные условия полета, система автоматического управления выполнена с возможностью блокировки включения автоматического увода экипажем с использованием тумблера блокировки включения автоматического увода, приведения ЛА к горизонтальному полету и стабилизации высоты полета после выключения автоматического увода, сравнения сигналов ручного и автоматического управления в продольном канале управления ЛА в процессе автоматического увода и выбора сигнала, задающего наибольшее отклонение рулевых поверхностей ЛА на кабрирование, согласования сигнала автоматического управления с сигналом ручного управления, если последний был выбран, а система дистанционного управления выполнена с возможностью принятия, в процессе автоматического увода, выбранного системой автоматического управления сигнала в качестве сигнала управления в продольном канале управления ЛА., средства индикации и сигнализации выполнены с возможностью индикации и сигнализации разрешения и предупреждения включения увода, необходимости увода от поверхности земли, направления увода.
Изобретение иллюстрируется графическими материалами, на которых изображено:
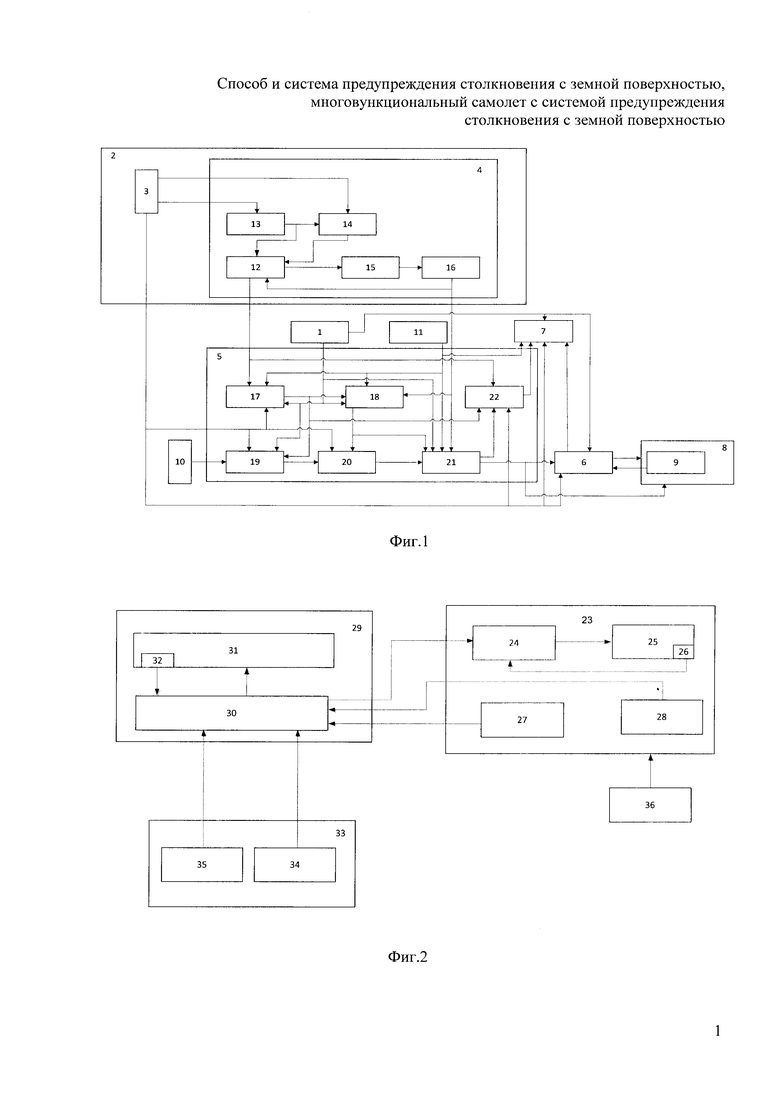
- Фиг. 1 - Блок схема системы предупреждения столкновения пилотируемого летательного аппарата с земной поверхностью,
- Фиг. 2 - Блок схема многофункционального маневренного самолета с системой предупреждения столкновения с земной поверхностью.
- Фиг. 3 - Фрагмент математического моделирования.
Согласно предложенному способу предупреждения столкновения пилотируемого ЛА с земной поверхностью, определяют параметры положения и движения пилотируемого летательного аппарата, определяют максимальную высоту рельефа местности в зоне мониторинга рельефа местности, вычисляют потерю высоты при включении автоматического увода, с использованием которой вычисляют высоту включения автоматического увода, формируют сигнал на включение автоматического увода и осуществляют автоматический увод от поверхности земли при снижении ЛА до высоты включения автоматического увода, задают несколько траекторий автоматического увода, вычисляют потерю высоты при включении автоматического увода для каждой траектории автоматического увода, выбирают в качестве траектории автоматического увода траекторию, на которой величина потери высоты при включении автоматического увода имеет минимальное значение, принимают в качестве величины потери высоты при включении автоматического увода это минимальное значение и корректируют выбранную траекторию увода в части вывода ЛА на высоту, превышающую максимальную высоту рельефа местности в зоне мониторинга рельефа местности.
Задают опасную высоту, с использованием которой вычисляют высоту включения автоматического увода
Вычисляют величину времени оставшегося до включения автоматического увода, с учетом которого формируют и выдают предупредительную сигнализацию экипажу.
Определяют исправность информационных средств, достоверность критических параметров полета, с учетом которых формируют признак готовности предупреждения столкновения пилотируемого летательного аппарата с земной поверхностью, с использованием которого и после вывода ЛА на высоту большую опасной формируют и индицируют признак разрешения предупреждения столкновения с земной поверхностью, а потерю высоты при включении автоматического увода, высоту включения автоматического увода, сигнал на включение автоматического увода, сигналы индикации и сигнализации увода формируют при наличии признака разрешения предупреждения столкновения с земной поверхностью.
Формируют и выдают сигнал экипажу о необходимости увода от поверхности земли и индикацию экипажу о направлении увода.
Сравнивают сигналы ручного и автоматического управления в продольном канале управления ЛА в процессе автоматического увода и выбирают сигнал, задающий наибольшее отклонение рулевых поверхностей ЛА на кабрирование, согласовывают сигнал автоматического управления с сигналом ручного управления, если последний был выбран, и принимают выбранный сигнал в качестве сигнала управления в продольном канале управления ЛА.
Система предупреждения столкновения летательного аппарата с земной поверхностью содержит (см. фиг. 1) измеритель воздушно-скоростных параметров 1, навигационную систему 2 с навигационными датчиками 3 и средствами для запоминания и обработки данных рельефа местности 4, управляющий вычислитель 5, систему автоматического управления 6, средства индикации и сигнализации 7, систему дистанционного управления 8 с датчиками положения органов ручного управления самолетом 9, систему ограничительных сигналов 10, задатчик опасной высоты управляемый экипажем 11.
Первый и второй входы средств для запоминания и обработки данных рельефа местности 4 соединены с соответствующими выходами навигационных датчиков 3.
Первый и второй выходы средств для запоминания и обработки данных рельефа местности 4 являются соответствующими выходами навигационной системы 2, третьим выходом которой является соответствующий выход навигационных датчиков 3.
Первый выход измерителя воздушно-скоростных параметров 1 соединен с первым входом управляющего вычислителя 5. Третий выход блока 3 соединен со вторым входом управляющего вычислителя 5, третий и четвертый входы которого соединены с первым и вторым выходами средств для запоминания и обработки данных рельефа местности 4 соответственно. Третий выход блока 3 соединен с первым входом системы автоматического управления 6, второй вход которой соединен с первым выходом управляющего вычислителя 5, третий вход - со вторым выходом измерителя воздушно-скоростных параметров 1, четвертый вход - с выходом датчиков положения органов ручного управления самолетом 9, а первый выход - со входом системы дистанционного управления 8. Первый, второй, третий, четвертый и пятый входы средств индикации и сигнализации 7 соединены с выходом измерителя воздушно-скоростных параметров 1, третьим выходом навигационной системы 2, вторым выходом управляющего вычислителя 5, вторым выходом системы автоматического управления 6, выходом задатчика опасной высоты 11 соответственно. Шестой и пятый входы управляющего вычислителя 5 соединены с выходами системы ограничительных сигналов 10 и задатчика опасной высоты 11.
Средства для запоминания и обработки данных рельефа местности 4 содержат запоминающее устройство базы данных рельефа местности 12, преобразователь навигационной информации 13, вычислитель границ зоны мониторинга 14, быстродействующее запоминающее устройство временной базы данных рельефа местности 15, формирователь данных мониторинга рельефа 16.
Первый вход преобразователя навигационной информации 13 является первым входом средств для запоминания и обработки данных рельефа местности 4, он соединен с первым выходом блока 3. Выход преобразователя навигационной информации 13 соединен с первыми входами вычислителя границ зоны мониторинга 14 и запоминающего устройства базы данных рельефа местности 12. Второй вход вычислителя границ зоны мониторинга 14, являющийся соответствующим входом средств для запоминания и обработки данных рельефа местности 4, соединен со вторым выходом блока 3. Выход вычислителя границ зоны мониторинга 14 соединен со вторым входом запоминающего устройства базы данных рельефа местности 12, первый выход которого соединен со входом быстродействующего запоминающего устройства временной базы данных рельефа местности 15, выход которого соединен со входом формирователя данных мониторинга рельефа 16. Выход формирователя данных мониторинга рельефа 16 является первым выходом средств для запоминания и обработки данных рельефа местности 4, он соединен с третьим входом запоминающего устройства базы данных рельефа местности 12. Второй выход блока 12 является вторым выходом средств для запоминания и обработки данных рельефа местности 4
Управляющий вычислитель 5 содержит последовательно соединенные формирователь признака готовности предупреждения увода 17 и формирователь разрешения предупреждения увода 18, последовательно соединенные вычислитель располагаемой нормальной перегрузки автоматического управления 19, вычислитель потери высоты при включении увода 20, формирователь команд и сигналов автоматического управления уводом 21 и формирователь сигналов для индикации и сигнализации экипажу 22.
Первый вход формирователя 17 является соответствующим входом управляющего вычислителя 5, он соединен с выходом измерителя воздушно-скоростных параметров 1 и первым входом блока 18. Второй вход формирователя 17 является соответствующим входом управляющего вычислителя 5, он соединен с третьим выходом блока 3. Третий вход формирователя 18 является соответствующим входом управляющего вычислителя 5, он соединен с выходом формирователя 16. Третий вход формирователя 17 является четвертым входом управляющего вычислителя 5, он соединен со вторым выходом блока 4. Четвертый вход формирователя 17 является пятым входом управляющего вычислителя 5, он соединен с одноименным входом блока 18 и выходом задатчика опасной высоты 11.
Выход формирователя 17 соединен со вторым входом блока 18. Первый вход блока 19 соединен с одноименным входом блока 5, второй вход блока 19 соединен с выходом блока 17, третий вход блока 19 соединен с шестым входом блока 5 и выходом системы ограничительных сигналов 10. Выход блока 19 соединен с первым входом блока 20, второй вход которого соединен с одноименным входом вычислителя 5, а третий вход - с выходом блока 18. Первый, третий и пятый входы блока 21 соединены с одноименными входами вычислителя 5, второй вход блока 21 соединен с выходом блока 20, четвертый вход - с выходом блока 18. Первый выход блока 21 является первым выходом вычислителя 5, второй выход блока 21 соединен с первым входом блока 22. Второй вход блока 22 соединен с выходом блока 18, третий вход блока 22 соединен со вторым выходом блока 12, четвертый вход блока 22 соединен с третьим выходом блока 3, а выход является вторым выходом вычислителя 5.
Возможность осуществления изобретения иллюстрируется на примере системы предупреждения столкновения с землей маневренного самолета. Этот пример не должен рассматриваться ни как ограничивающий объем изобретения, ни как предпочтительная для всех случаев форма его реализации.
В измерителе воздушно-скоростных параметров 1 формируются: скоростной напор, приборная скорость, высота, угол атаки, их достоверности, исправность.
В навигационных датчиках 3 формируются:
- координаты местоположения ЛА в земной системе координат (ЗСК), координаты начала отсчета цифровой карты в ЗСК-1 выход;
- земная скорость ЛА, путевой угол, СКО определения координат ЛА (V, Ψ, σ) - 2 выход;
- составляющие скорости, вертикальные скорость и ускорение ЛА (V, Vy, Ay), углы крена и наклона траектории (γ,θ), достоверности, исправность - 3 выход;
В системе ограничительных сигналов 10 формируется располагаемая нормальная перегрузка ЛА с использованием информации о скоростном напоре с блока 1.
Nурасп=Cypacп*q*К9;
Где Сурасп - располагаемый коэффициент подъемной силы;
q - скоростной напор;
К9 - константа для данного типа ЛА.
В преобразователе навигационной информации 13 осуществляется пересчет координат положения летательного аппарата с блока 3 из земной системы координат (ЗСК) в систему координат базы данных рельефа местности (цифровой карты местности - СКЦКМ), с учетом земных координат начала отсчета цифровой карты, которые поступают с первого выхода блока 3.
Текущие координаты местоположения самолета (ТКМС) в СКЦКМ поступают с выхода блока 13 в блок 14 и в блок 12, на втором выходе которого формируется высота рельефа местности, соответствующая ТКМС. Второй выход блока 12 является вторым выходом блока 4, который соединен с четвертым входом блока 5.
В вычислителе 14 координаты границы зоны мониторинга в системе координат цифровой карты местности (СКЦКМ) вычисляются аналогично Заявке №2007119631 по следующей информации:
- времени упреждения (для маневренного ЛА Тu=10-15 сек);
- земной скорости, путевом угле ЛА, погрешности счисления координат ЛА с блока 3;
- координатам местоположения ЛА в СКЦКМ с блока 13.
Указанные координаты границы зоны мониторинга в СКЦКМ поступают с первого выхода блока 14 в блок 12, откуда в блок 15 поступают значения высот рельефа местности для точек карты (элементов базы данных рельефа местности), лежащих внутри зоны мониторинга.
В формирователе данных мониторинга рельефа 16 осуществляется выбор наибольшего (Ymax) значения из значений высот рельефа, которые поступают на вход блока из быстродействующего запоминающего устройства временной базы данных рельефа местности 15. Величина Ymax поступает на третий вход блока 12, где определяются координаты местоположения соответствующей точки рельефа местности в СКЦКМ. Эти координаты поступают со второго выхода блока 12, являющегося вторым выходом блока 4, на четвертый вход блока 5.
В формирователе признака готовности предупреждения столкновения с земной поверхностью 17 (далее по тексту признак готовности) проводится анализ:
- исправности (отсутствие отказов) информационных средств: измерителя воздушно-скоростных параметров 1, навигационной системы 2, средств для запоминания и обработки данных рельефа местности 4, системы ограничительных сигналов 10;
- достоверности критических параметров (составляющие вектора скорости, угол крена, барометрическая высота, опасная высота);
Признак готовности функционирования устанавливается при наличии (И):
- достоверности критических параметров;
- исправности необходимых информационных средств.
Признак готовности функционирования снимается при отсутствии (ИЛИ):
- признака достоверности одного из критических параметров;
- исправности одного из необходимых информационных средств.
В блоке 18 формируется признак разрешения предупреждения увода. Признак разрешения предупреждения увода формируется (включается) при одновременном наличии условий (И):
- после взлета абсолютная барометрическая высота должна быть более суммы опасной высоты и максимальной высоты рельефа в зоне мониторинга рельефа местности;
- есть признак готовности.
Признак разрешения предупреждения увода обнуляется при (ИЛИ): отсутствии признака готовности либо задании в полете значения опасной высоты, при котором абсолютная барометрическая высота меньше суммы опасной высоты и максимальной высоты рельефа в зоне мониторинга рельефа местности.
В блоке 19, при наличии признака готовности с блока 17, формируется располагаемая нормальная перегрузка автоматического управления по информации о располагаемой нормальной перегрузке ЛА с блока 10:
Ny распау (U18)=min (((U10-1)*K18+1), Nynp);
Где K18 - константа для данного типа ЛA; Ui - выход i-го блока.
Nynp - расчетная максимальная нормальной перегрузка автоматического управления (функция от числа М для данного типа ЛА), которая формируется по информации с блоков 1, 10.
В блоке 20, при наличии разрешения с блока 18, осуществляется: вычисление потери высоты при включении автоматического увода для 2-х возможных вариантов формирования траектории увода, определяемых условиями и логикой включения продольного, бокового каналов САУ:
- 1-й вариант предусматривает следующую последовательность этапов: приведение к нулевому крену, выход на перегрузку при угле крена меньшем 80 град., полет с располагаемой нормальной перегрузкой автоматического управления.
- 2-й вариант предусматривает следующую последовательность этапов: выход на перегрузку, полет с располагаемой нормальной перегрузкой автоматического управления, а условия включения предусматривают наличие крутого пикирования.
Для каждого из вариантов вычисляется потеря высоты, являющаяся суммой потерь высот составляющих этапов. При этом используется информация о:
- скорости, вертикальной скорости, углах крена и наклона траектории с блока 2;
- располагаемой перегрузке автоматического управления с блока 19;
- признаке разрешения предупреждения увода с блока 18
Потеря высоты при включении автоматического увода приравнивается минимальному значению из величин потерь высоты обоих вариантов траекторий увода.
В блоке 20 также определяется номер траектории, на которой достигается минимальная потеря высоты при включении автоматического увода.
№ траектории=1 если Нпв1<Нпв2, иначе № траектории=2
Моделирование различных условий полета показало:
- в условиях нисходящих маневров (пикирование с различными кренами, бочки …) минимальная потеря высоты имела место для 1-го варианта траектории увода;
- в условиях переворота при углах пикирования близких к 90 град минимальная потеря высоты имела место для 2-го варианта траектории увода.
То есть при такой логике удается минимизировать расчетную потерю высоты при включении увода для возможных условий маневрирования ЛА и за счет этого исключить «ложные» срабатывания увода.
В обоих вариантах траектории увода есть этап полета с располагаемой нормальной перегрузкой автоматического управления, от величины которой зависит потеря высоты на этом этапе увода: чем меньше перегрузка, тем больше потеря высоты.
Величина располагаемой нормальной перегрузки автоматического управления поступает в блок 20 с блока 19.
В блоке 21, при наличии разрешения с блока 18, команда на включение автоматического увода формируется путем сравнения абсолютной барометрической высоты полета с измерителя 1 (Нб) с высотой включения автоматического увода (Hay):
Нб≤Нау;
Где Нау=Ноп+Ymax+Нпв;
Hоп - опасная высота с блока 11;
Hпв - потеря высоты при включении автоматического увода с блока 20;
Ymax - максимальная высота рельефа местности в зоне мониторинга с блока 16;
Снятие (выключение) команды увода осуществляется при выводе ЛА в безопасные условия полета, которые определяются:
- величина угла наклона траектории большая θb град.;
- абсолютная величина угла крена меньшей Gab град;
- величина высоты оставшейся до включения увода большая Hbz (Host>Hbz), где .Host=Нб - Hay; Hbz-const.
В блоке 21 также формируются сигналы траекторного управления по информации с блоков 1,2 и признак управления по крену в процессе автоматического увода.
Для траектории 2 формируются:
- нулевой признак управления по крену;
- заданный угол наклона траектории, (Θзад), соответствующий приведенной высоте рельефа (HzUm).
Приведенная высота рельефа местности (HzUm) вычисляется путем суммирования:
- максимальной высоты рельефа местности (мажоранты) в зоне мониторинга (Ymax);
- опасной высоты относительно подстилающей поверхности (Hоп);
- дополнительного запаса по высоте - Hescd=const,.
Здесь HzUm=hpszMaxi+Hоп+Hescd.
Θзад=(HzUm-Hб)/(V*Th)*57.3 (градусы).
Th - константа для данного типа ЛА.
Для траектории 1 формируются:
- признак управления по крену;
- заданный крен формируется равным нулю (Gазад=0);
- при крене меньшем 80 град формируется заданный угол наклона траектории (Θзад), величина которого вычисляется аналогично траектории 2.
Система автоматического управления 6 при поступлении команды «Увод» с блока 21 осуществляет:
A) В боковом канале:
- при нулевом признаке управления по крену (с блока 21) - обнуляет выходной сигнал САУ в боковом канале;
- при наличии признака управления по крену - приведение ЛА к нулевому крену.
Б) В продольном канале:
- вывод ЛА на заданный с блока 21. угол наклона траектории;
- сравнение выходного сигнала САУ и сигнала с датчиков положения РУС (по тангажу) 9 и выбор сигнала, доставляющего максимальное отклонение рулевых поверхностей на кабрирование, с использованием устройств выбора максимального/минимального сигнала;
- согласование выходного сигнала САУ с сигналом ручного управления, если он был выбран, путем подключения рассогласования сигналов (с необходимым коэффициентом) на вход выходного интегратора продольного канала САУ.
Таким образом, при совместном с экипажем (комбинированном) управлении ЛА в процессе увода в продольном канале обеспечивается выбор максимального сигнала (РУС, САУ) на кабрирование и исключение сигнала РУС на пикирование либо на уменьшение сигнала на кабрирование, что существенно повышает эффективность комбинированного управления и безопасность полета.
B). В канале управления тягой силовых установок - стабилизацию скорости полета в заданном диапазоне скоростей, например (150-200 м/с).
САУ 6 при снятии команды «Увод» с блока 21 осуществляет:
- приведение ЛА к горизонту с последующей стабилизацией барометрической высоты и курса.
В СДУ 8 по признаку автоматического увода с блока 21 осуществляется:
В боковом канале:
- управление рулевыми приводами по сигналам САУ;
- управление рулевыми приводами по сигналам РУС при нулевом выходном сигнале САУ.
В продольном канале:
- управление рулевыми приводами по сигналу (РУС или САУ), доставляющему максимальное отклонение рулевых поверхностей на кабрирование и выбранному в САУ.
В блоке 22, при наличии сигнала разрешения с блока 18,. осуществляется формирование сигналов для индикации и сигнализации экипажу.
Сигнал «Предупреждение увода» формируется при наличии сигнала разрешения с блока 18. Уменьшение значения сигнала (перемещение символа по экрану) происходит пропорционально уменьшению времени, оставшемуся до включения увода,
Время, оставшееся до включения автоматического увода, вычисляется как отношение высоты, оставшейся до включения автоматического увода с блока 21, к вертикальной скорости сближения ЛА с земной поверхностью. (Tost=Host/ Vys).
Где Vys - вертикальная скорость сближения ЛА с земной поверхностью.
Vys=Vyr-Vy, где Vyr - вертикальная скорость (уклон) рельефа (вычисляется по значениям высот и координат 2-х точек в зоне мониторинга рельефа местности с блока 4: точки с ТКМС и точки с высотой равной Ymax), Vy - вертикальная скорость ЛА с блока 2.
При величине времени, меньшей заданного, формируется сигнал для предупредительной сигнализации экипажу.
Признак направления увода имеет четыре значения: 0, 1, 4, 5.
Значение 0 (стрелка отсутствует) формируется при РК «УВОД «=0 (с блока 21) ИЛИ при РК «УВОД»=1 И Θ≥Θзад-2 (град),
где Θзад - заданный угол наклона траектории с блока 21; Θ - угол наклона траектории с блока 2
При РК «УВОД «=1 И Θ<Θзад-2 (град):
значение 1 (стрелка вверх) формируется при abs(γ)≤30 град;
значение 5 (стрелки: вверх, влево) при γ>30 град;
значение 4 (стрелки: вверх, вправо) при γ<-30 град.
Где γ - угол крена с блока 2.
В блоке 7 формируются и индицируются по информации с блока 22 символы:
- предупреждения увода;
- необходимости увода;
- направления увода;
Также в блоке 7 формируется предупредительная сигнализация и сигнализация увода.
Многофункциональный маневренный самолет (Фиг. 2) содержит комплексную систему управления 23, включающую систему автоматического управления 24, систему дистанционного управления 25 с датчиками положения органов ручного управления самолетом 26, систему измерения воздушно-скоростных параметров 27, систему ограничительных сигналов 28, информационно управляющую систему 29 с вычислительной системой 30, средствами индикации, сигнализации и управления 31 с задатчиком опасной высоты управляемым экипажем 32, комплекс пилотажно-навигационного оборудования 33 с навигационными датчиками 34 и средствами для запоминания и обработки данных рельефа местности 35, соединенные каналами информационного обмена, тумблер блокировки включения автоматического увода управляемый экипажем 36, соединенный с комплексной системой управления 23.
Вычислительная система 30 соединена входами с системой измерения воздушно-скоростных параметров 27, системой ограничительных сигналов 28, средствами индикации, сигнализации и управления 31, средствами для запоминания и обработки данных рельефа местности 35, навигационными датчиками 34, а выходами с системой автоматического управления 24, средствами индикации, сигнализации и управления 31.
Тумблер блокировки включения автоматического увода управляемый экипажем 36 введен для расширения возможностей экипажа (в условиях хорошей видимости, необходимости полета на предельно малых высотах). При активации тумблера 36 обеспечивается выдача индикации и сигнализации.
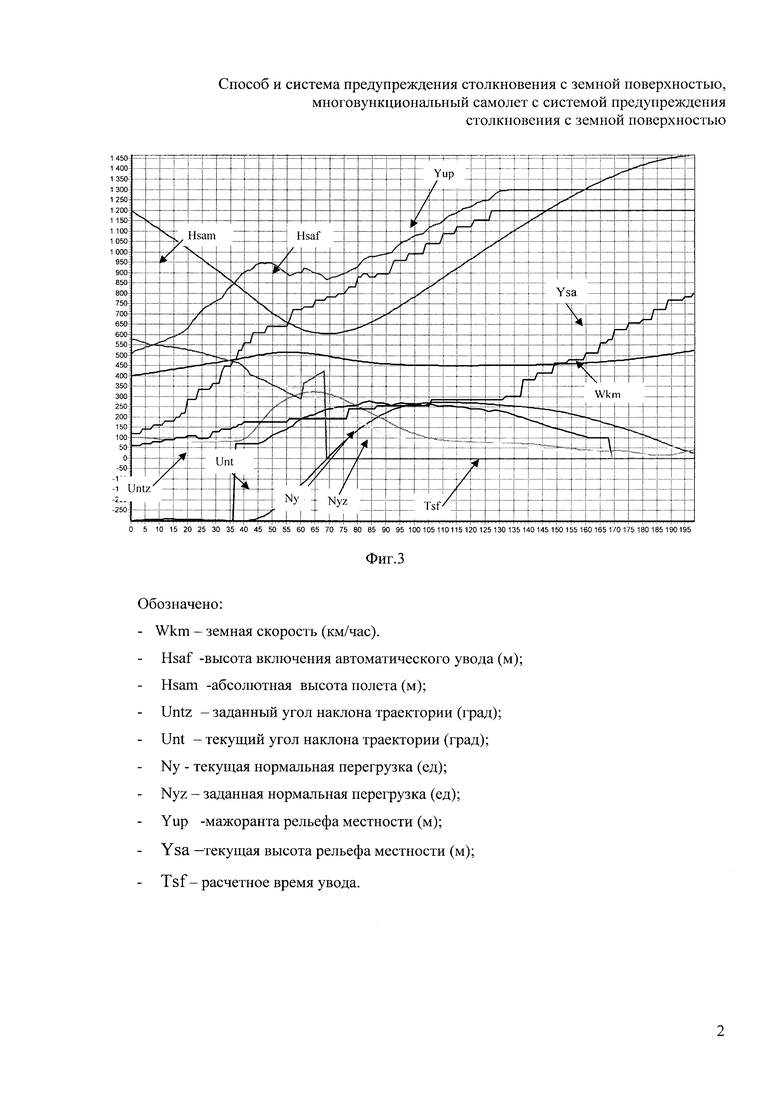
Эффективность использования системы предупреждения столкновения летательного аппарата с земной поверхностью подтверждена результатами математического моделирования в эксплуатационном диапазоне скорости полета, углов крена и тангажа, с использованием цифровой карты рельефа местности.
На фиг. 3 представлен фрагмент математического моделирования - процесс пикирования ЛА с углом наклона траектории 30 град, при полете над пересеченным рельефом местности, Ноп=100 м.
Итоговые характеристики представлены в таблице.

Где:
Wkm=480 км/час - земная скорость на момент начала увода ЛА;
Hsam=850 m - абсолютная высота на момент начала увода ЛА;
Unt=-30 градусов - угол наклона траектории на момент начала увода ЛА;
Wy=- 66 м/с - вертикальная скорость на момент начала увода ЛА;
Ау=-2.3 м/с2 - вертикальное ускорение на момент начала увода ЛА;
Nyma=3.2 - максимальная нормальная перегрузка;
Vmin=400 км/час - минимальное значение земной скорости;
Hmi=405 м - минимальная высота ЛА относительно рельефа.
Летные испытания многофункционального маневренного самолета с системой предупреждения столкновения с земной поверхностью показали:
- повышение адекватности (своевременности) принятия решения о необходимости увода от столкновения с землей при маневрировании вблизи земли;
- расширение разрешенной области безопасного маневрирования вблизи земли;
- улучшение информационной осведомленности экипажа;
- повышение эффективности совместного с экипажем (комбинированного) управления ЛА при уводе.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С РЕЛЬЕФОМ МЕСТНОСТИ | 2007 |
|
RU2368954C2 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С РЕЛЬЕФОМ МЕСТНОСТИ И УСТРОЙСТВО НА ЕГО ОСНОВЕ | 2006 |
|
RU2301456C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 1996 |
|
RU2134911C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ПРЕПЯТСТВИЯМИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2007 |
|
RU2356099C1 |
| Способ и система формирования оценки абсолютной высоты полета летательного аппарата, многофункциональный маневренный самолет с такой системой | 2017 |
|
RU2671613C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ САМОЛЕТОВ И ВЕРТОЛЕТОВ С РЕЛЬЕФОМ МЕСТНОСТИ И УСТРОЙСТВО НА ЕГО ОСНОВЕ | 2008 |
|
RU2376645C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ЗЕМЛЕЙ | 2005 |
|
RU2271039C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| СИСТЕМА УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В РЕЖИМЕ УВОДА С ОПАСНОЙ ВЫСОТЫ ПРИ РАБОТЕ ПО НАЗЕМНЫМ ОБЪЕКТАМ | 2016 |
|
RU2644048C2 |
Группа изобретений относится к способу и системе предупреждения столкновений пилотируемого летательного аппарата с земной поверхностью, а также многофункциональному маневренному самолету. Для предупреждения столкновений определяют параметры положения и движения летательного аппарата, максимальную высоту рельефа местности в зоне мониторинга, вычисляют потерю высоты при включении автоматического увода, формируют несколько траекторий автоматического увода, осуществляют выбор траектории определенным образом и осуществляют автоматической увод при достижении определенной высоты. Система содержит измеритель воздушно-скоростных параметров, навигационную систему, управляющий вычислитель, систему автоматического управления и систему дистанционного управления, средства индикации и сигнализации, задатчик опасной высоты, соединенные определенным образом. Многофункциональный маневренный самолет содержит комплексную систему управления с автоматической и дистанционной системами управления, системой измерения воздушно-скоростных параметров и системой ограничительных сигналов, информационно-управляющую систему с вычислительной системой и средствами индикации, сигнализации и управления, комплекс пилотажно-навигационного оборудования с навигационными датчиками и средством запоминания рельефа местности, тумблер блокировки включения автоматического увода. Обеспечивается повышение безопасности маневрирования самолета на предельно малых высотах. 3 н. и 7 з.п. ф-лы, 3 ил., 1 табл.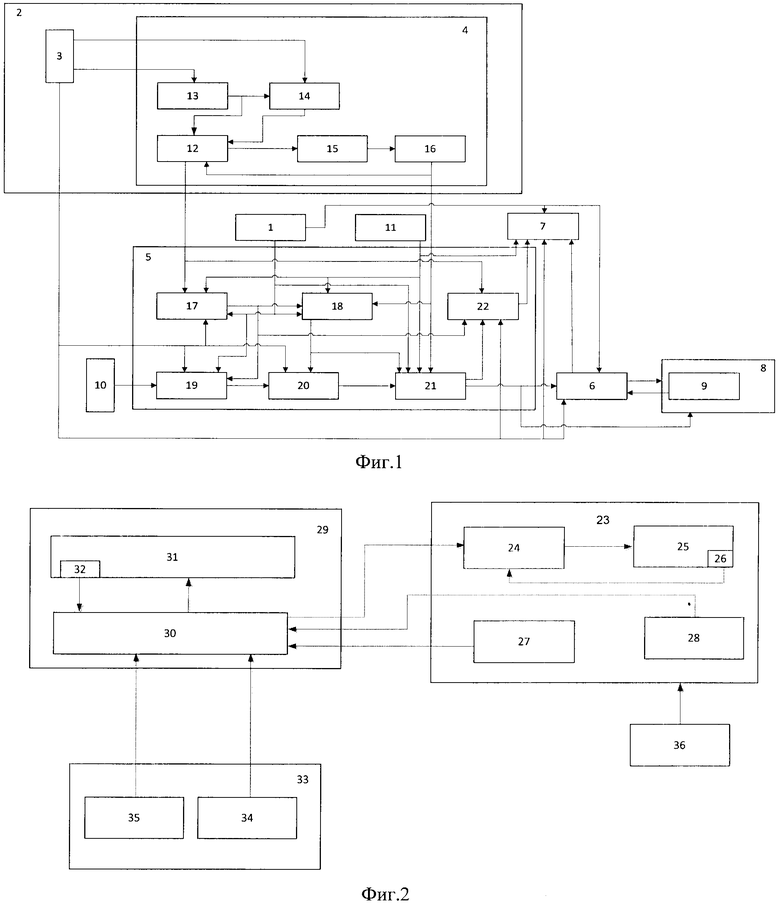
1. Способ предупреждения столкновения пилотируемого летательного аппарата (ЛА) с земной поверхностью, при котором определяют параметры положения и движения пилотируемого летательного аппарата, определяют максимальную высоту рельефа местности в зоне мониторинга рельефа местности, вычисляют потерю высоты при включении автоматического увода, с использованием которой вычисляют высоту включения автоматического увода, формируют сигнал на включение автоматического увода и осуществляют автоматический увод от поверхности земли при снижении ЛА до высоты включения автоматического увода, отличающийся тем, что задают несколько траекторий автоматического увода, вычисляют потерю высоты при включении автоматического увода для каждой траектории автоматического увода, выбирают в качестве траектории автоматического увода траекторию, на которой величина потери высоты при включении автоматического увода имеет минимальное значение, принимают в качестве величины потери высоты при включении автоматического увода это минимальное значение и корректируют выбранную траекторию увода в части вывода ЛА на высоту, превышающую максимальную высоту рельефа местности в зоне мониторинга рельефа местности.
2. Способ по п. 1, отличающийся тем, что задают опасную высоту, с использованием которой вычисляют высоту включения автоматического увода.
3. Способ по п. 1, отличающийся тем, что вычисляют величину времени оставшегося до включения автоматического увода, с учетом которого формируют и выдают предупредительную сигнализацию экипажу.
4. Способ по п. 1, отличающийся тем, что формируют и выдают сигнал экипажу о необходимости увода от поверхности земли и индикацию экипажу о направлении увода.
5. Способ по п. 1, отличающийся тем, что определяют исправность информационных средств, достоверность критических параметров полета, с учетом которых формируют признак готовности предупреждения столкновения с земной поверхностью, с использованием которого и после вывода ЛА на высоту, большую опасной, формируют и индицируют признак разрешения предупреждения столкновения с земной поверхностью, а потерю высоты при включении автоматического увода, высоту включения автоматического увода, сигнал на включение автоматического увода, сигналы индикации и сигнализации увода формируют при наличии признака разрешения предупреждения столкновения с земной поверхностью.
6. Способ по п. 1, отличающийся тем, что включение автоматического увода блокируется при установке экипажем величины опасной высоты, большей текущего значения высоты полета относительно максимальной высоты рельефа местности в зоне мониторинга рельефа местности.
7. Способ по п. 1, отличающийся тем, что сравнивают сигналы ручного и автоматического управления в продольном канале управления ЛА в процессе автоматического увода и выбирают сигнал, задающий наибольшее отклонение рулевых поверхностей ЛА на кабрирование, согласовывают сигнал автоматического управления с сигналом ручного управления, если последний был выбран, и принимают выбранный сигнал в качестве сигнала управления в продольном канале управления ЛА.
8. Способ по п. 1, отличающийся тем, что определяют безопасные условия полета, выводят ЛА в эти условия в процессе автоматического увода, после чего выключают автоматический увод, приводят самолет к горизонтальному полету и стабилизируют высоту полета.
9. Система предупреждения столкновения летательного аппарата с земной поверхностью, содержащая измеритель воздушно-скоростных параметров, навигационную систему со средствами для запоминания и обработки данных рельефа местности, соединенные с управляющим вычислителем, систему автоматического управления, соединенную с измерителем воздушно-скоростных параметров, навигационной системой и управляющим вычислителем, систему дистанционного управления с датчиками положения органов ручного управления самолетом, соединенную с системой автоматического управления, средства индикации и сигнализации, соединенные с управляющим вычислителем, навигационной системой, измерителем воздушно-скоростных параметров и системой автоматического управления, при этом управляющий вычислитель выполнен с возможностью вычисления потери высоты при включении автоматического увода и вычисления с ее использованием высоты включения автоматического увода, формирования сигнала на включение автоматического увода от поверхности земли при снижении ЛА до высоты включения автоматического увода, средства для запоминания и обработки данных рельефа местности выполнены с возможностью определения максимальной высоты рельефа местности в зоне мониторинга рельефа местности, отличающаяся тем, что она снабжена задатчиком опасной высоты управляемым экипажем, соединенным с управляющим вычислителем и средствами индикации и сигнализации, датчики положения органов ручного управления самолетом системы дистанционного управления соединены с системой автоматического управления, причем управляющий вычислитель выполнен с возможностью вычисления высоты включения автоматического увода с учетом величины опасной высоты, задаваемой экипажем с использованием задатчика опасной высоты, и с возможностью блокировки сигнала включения автоматического увода при установке экипажем величины опасной высоты, с использованием задатчика опасной высоты, большей текущего значения высоты полета относительно максимальной высоты рельефа местности в зоне мониторинга рельефа местности, управляющий вычислитель также выполнен с возможностью задания нескольких траекторий автоматического увода, вычисления потери высоты при включении автоматического увода для каждой траектории автоматического увода, выбора в качестве траектории автоматического увода траектории, на которой величина потери высоты при включении автоматического увода имеет минимальное значение, принятия в качестве величины потери высоты при включении автоматического увода этого минимального значения и корректировки выбранной траектории увода в части вывода ЛА на высоту, превышающую максимальную высоту рельефа местности в зоне мониторинга рельефа местности, расчета величины времени, оставшегося до включения автоматического увода, и формирования с его учетом предупредительной сигнализации для выдачи экипажу, формирования сигналов о необходимости увода от поверхности земли и о направлении увода для сигнализации и индикации экипажу, определения исправности информационных средств, достоверности критических параметров полета, формирования с их учетом признака готовности предупреждения столкновения с земной поверхностью, с использованием которого и после вывода ЛА на высоту, большую опасной, формируют и индицируют признак разрешения предупреждения столкновения с земной поверхностью, а потерю высоты при включении автоматического увода, высоту включения автоматического увода, сигнал на включение автоматического увода, сигналы индикации и сигнализации увода формируют при наличии признака разрешения предупреждения столкновения с земной поверхностью, определения безопасных условий полета, формирования траектории автоматического увода с выводом ЛА в эти условия в процессе автоматического увода и выключением автоматического увода при выводе ЛА в безопасные условия полета, средства индикации и сигнализации выполнены с возможностью индикации и сигнализации разрешения и предупреждения включения увода, необходимости увода от поверхности земли, направлении увода, система автоматического управления выполнена с возможностью приведения ЛА к горизонтальному полету и стабилизации высоты полета после выключения автоматического увода, сравнения сигналов ручного и автоматического управления в продольном канале управления ЛА в процессе автоматического увода и выбора сигнала, задающего наибольшее отклонение рулевых поверхностей ЛА на кабрирование, согласования сигнала автоматического управления с сигналом ручного управления, если последний был выбран, а система дистанционного управления выполнена с возможностью принятия, в процессе автоматического увода, выбранного системой автоматического управления сигнала в качестве сигнала управления в продольном канале управления ЛА.
10. Многофункциональный маневренный самолет с системой предупреждения столкновения с земной поверхностью, содержащий комплексную систему управления с системой измерения воздушно-скоростных параметров, системой автоматического управления и системой дистанционного управления с датчиками положения органов ручного управления самолетом, информационно-управляющую систему с вычислительной системой, средствами индикации и сигнализации, комплекс пилотажно-навигационного оборудования с навигационными датчиками и средствами для запоминания и обработки данных рельефа местности, соединенные каналами информационного обмена, при этом средства для запоминания и обработки данных рельефа местности и средства индикации и сигнализации соединены с вычислительной системой, система автоматического управления соединена с системой дистанционного управления и системой измерения воздушно-скоростных параметров, вычислительная система выполнена с возможностью вычисления потери высоты при включении автоматического увода и вычисления с ее использованием высоты включения автоматического увода, формирования сигнала на включение автоматического увода от поверхности земли при снижении ЛА до высоты включения автоматического увода, средства для запоминания и обработки данных рельефа местности выполнены с возможностью определения максимальной высоты рельефа местности в зоне мониторинга рельефа местности, отличающийся тем, что он дополнительно оборудован задатчиком опасной высоты управляемым экипажем и тумблером блокировки включения автоматического увода управляемым экипажем, датчики положения органов ручного управления самолетом системы дистанционного управления соединены с системой автоматического управления, причем вычислительная система выполнена с возможностью вычисления высоты включения автоматического увода с учетом величины опасной высоты, задаваемой экипажем с использованием задатчика опасной высоты, и с возможностью блокировки сигнала включения автоматического увода при установке экипажем величины опасной высоты, с использованием задатчика опасной высоты, большей текущего значения высоты полета относительно максимальной высоты рельефа местности в зоне мониторинга рельефа местности, вычислительная система также выполнена с возможностью задания нескольких траекторий автоматического увода, вычисления потери высоты при включении автоматического увода для каждой траектории автоматического увода, выбора в качестве траектории автоматического увода траектории, на которой величина потери высоты при включении автоматического увода имеет минимальное значение, принятия в качестве величины потери высоты при включении автоматического увода этого минимального значения и корректировки выбранной траектории увода в части вывода ЛА на высоту, превышающую максимальную высоту рельефа местности в зоне мониторинга рельефа местности, расчета величины времени, оставшегося до включения автоматического увода, и формирования с его учетом предупредительной сигнализации для выдачи экипажу, формирования сигналов о необходимости увода от поверхности земли и о направлении увода для сигнализации и индикации экипажу, определения исправности информационных средств, достоверности критических параметров полета, формирования с их учетом признака готовности предупреждения столкновения с земной поверхностью, с использованием которого и после вывода ЛА на высоту, большую опасной, формируют и индицируют признак разрешения предупреждения столкновения с земной поверхностью, а потерю высоты при включении автоматического увода, высоту включения автоматического увода, сигнал на включение автоматического увода, сигналы индикации и сигнализации увода формируют при наличии признака разрешения предупреждения столкновения с земной поверхностью, определения безопасных условий полета, формирования траектории автоматического увода с выводом ЛА в эти условия в процессе автоматического увода и выключением автоматического увода при выводе ЛА в безопасные условия полета, система автоматического управления выполнена с возможностью блокировки включения автоматического увода экипажем с использованием тумблера блокировки включения автоматического увода управляемого экипажем, приведения ЛА к горизонтальному полету и стабилизации высоты полета после выключения автоматического увода и с возможностью сравнения сигналов ручного и автоматического управления в продольном канале управления ЛА в процессе автоматического увода и выбора сигнала, задающего наибольшее отклонение рулевых поверхностей ЛА на кабрирование, согласования сигнала автоматического управления с сигналом ручного управления, если последний был выбран, система дистанционного управления выполнена с возможностью принятия, в процессе выполнения автоматического увода, выбранного системой автоматического управления сигнала в качестве сигнала управления в продольном канале управления ЛА, средства индикации и сигнализации выполнены с возможностью индикации и сигнализации разрешения и предупреждения включения увода, необходимости увода от поверхности земли, направления увода.
| СПОСОБ И СИСТЕМА ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С РЕЛЬЕФОМ МЕСТНОСТИ | 2007 |
|
RU2368954C2 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ЗЕМЛЕЙ И УСТРОЙСТВО НА ЕГО ОСНОВЕ | 2004 |
|
RU2262746C1 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| US 5892462 A1, 06.04.1999 | |||
| Способ формирования рулона из длинномерного металлического материала | 1985 |
|
SU1329863A1 |

