Система относится к области авиационного бортового оборудования и предназначена для установки на гражданские летательные аппараты (ЛА) для защиты ЛА в критических или катастрофических ситуациях.
В патенте WO 2005/004081, кл. МПК G08G 5/00 предлагается метод и аппаратура для предупреждения несанкционированного доступа в управление на летательных аппаратах. В случае появления подобной ситуации (захвата террористами ЛА) летчик нажимает тревожную кнопку и детектор, установленный в системе, анализирует отклонения от заданной траектории в режимах спуска-снижения с высоты, ниже определенной, увеличения тяги двигателей, изменения курса. В системе отсутствуют экспертные системы, тем самым отсутствует поддержка летчика в критической ситуации.
Известна управляющая экспертная система (ЭС) - Ильясов Б.Г., Парфенов Н.М. и др. «Автоматизация принятия решений при управлении системами «Человек-техника» с помощью экспертных систем». Эргономика в России, СНГ и мире. Международная конференция С-Петербург. Россия. 21-24. 1993 - для оказания помощи оператору, решающая следующие задачи: распознавание критической ситуации, принятие решений по управлению выводом сложной системы (объекта) из критической ситуации, выбор управляющих воздействий и контроль эффективности их реализации. В системе «человек-техника» критические ситуации, возникающие вследствие отказов техники, ошибок человека и неблагоприятных внешних условий, приводят в случае непринятия своевременных и правильных управляющих решений к аварии или катастрофе. Принятие решения человеком, управляющим сложной системой, затруднено вследствие многомерности факторов для анализа, неопределенности и неоднозначности описания критических ситуаций, связанных с малым резервом времени и большой психологической нагрузкой.
В базу знаний (БЗ) входят знания о предметной области управления сложной системой в критических ситуациях. В системе знания о проблемной области структурированы исходя из цели построения управляющей ЭС, оказания помощи управляющему в принятии решений при возникновении критических ситуаций.
В качестве инструментального средства оказания помощи эксперту в выражении своей концептуальной модели проблемной области используется программная система создания и ведения баз данных (БД) характеристик критических ситуаций и БЗ. Система выполняет функции автоматизации получения знаний от экспертов. Данные представляются реляционной БД характеристик критических ситуаций, выполняется проверка целостности создания БД, производится ситуационная кластеризация данных.
В процессе экспертного опроса для обеспечения необходимой полноты БД экспертам ставится задача анализа новых для них ситуаций; способом решения задач экспертной классификации является способ организации экспертных игр с коллективом экспертов. Сценарии экспертных игр предусматривают рассмотрение известных и новых для экспертов примеров критических ситуаций; в диалоге с ЭВМ заполняется БД. Создание и заполнение БД осуществляется с помощью средств систем управления реляционной БД для персональных ЭВМ с применением интеллектуального многооконного интерфейса. Окончательно согласованные экспертные оценки хранятся в БД и являются основной для создания правил распознавания критических ситуаций и принятия решений в БЗ ЭС.
Представление знаний об управлении системой в критических ситуациях осуществляется с помощью продукционной модели, позволяющей представлять правила распознавания ситуаций и принятия решений. В качестве критерия распознавания классов критических ситуаций в управляющей ЭС используется степень близости распознаваемой ситуации, представленной вектором, к эталонным описаниям классов критических ситуаций.
Однако при такой структуре ЭС управления система бортовых датчиков не включает в цикл работы по пилотированию ЛА. Динамические характеристики современных ЛА приводят к существенному усложнению систем автоматического управления (САУ) и значительному расширению их функциональных возможностей. В то же время увеличение сложности САУ способствовало существенному увеличению разнообразия отказов этих систем. Поэтому стала практически невозможной разработка только инструктивных указаний по действиям пилота при возникновении каждого из возможных отказов. Подробные инструкции можно разработать только для ограниченного перечня отказов, в пределах эксплуатационных ограничений ЛА бортового оборудования (БО). Возникновение же в полете отказов, действия по устранению которых предварительно не отрабатывались и не отражены в инструкциях, представляет серьезную проблему. Как показывает анализ катастроф ЛА, нежелательное развитие событий можно было бы предотвратить, если бы были выполнены соответствующие грамотные действия экипажа. Однако время, которым располагает пилот для этого, обычно не превышает нескольких секунд, а принимая во внимание стрессовое состояние человека во время аварии, становится ясно, что пилот может и не найти единственно правильного решения в нужный момент. Известно устройство для подачи сигнала тревоги на центральную станцию, см. патент РФ на полезную модель №33448 G08В 31/00, 2003. Целью создания системы является снижение влияния человеческого фактора на безопасность полетов, повышение полноты действий экипажа путем сочетания упреждающего контроля действий экипажа в процессе подготовки режимов полета и действий в аварийных ситуациях с выдачей результатов контроля в реальном времени подготовки режимов полета посредством управляемых электронных контрольных карт и заключительного контроля с выдачей тревожных сигналов с высоким привлекающим эффектом при невыполнении экипажем наиболее критических операций. В состав устройства оповещения членов экипажа об отказах, неисправностях и состоянии систем и агрегатов объекта с помощью световых и звуковых сигналов входят канал предупредительной информации, датчик сигнала, канал аварийной ситуации, блок управления, блок световой индикации и сигнализации, блоки запуска, коммутирующие элементы, сигнальный элемент, блок подачи сообщения, генератор проблеска, кнопочная панель генератора и задатчик регулирования яркости, блок экстраполяции, блок программ действий экипажа, блок управления индикацией, логический блок признаков выполнения действий.
Однако сочетание упреждающего контроля действий экипажа в процессе подготовки режимов полета и действий экипажа в аварийной ситуации (АС) строится на основе использования канала предупредительной информации, включающего блок экстраполяции на короткое время в логическом блоке программ действий экипажа, и не дает возможности предупредить выход пилотируемого ЛА на критические режимы управления. Система не дает возможности получить помощи экипажу - указаний в принятии решений по парированию сложившейся критической ситуации (КС), ведущей к полной либо частичной утрате системы выполняемой функции, либо к утрате объекта и гибели экипажа.
Известен способ интеллектуальной поддержки деятельности экипажа по обеспечению безопасности корабля, см. патент РФ №2244343 G08В 23/00, 2002, при котором измеряют параметры движения корабля, работы технических средств, состояние внутренней среды, вводят их в вычислительный комплекс и обрабатывают по программе экспертной системы, выявляющей отклонения параметров от штатных, и представляют на дисплеях информацию о действиях экипажа по предотвращению угрозы безопасности корабля. Производится определение психофизического состояния и перемещение по кораблю личного состава с последующим анализом указанных параметров с помощью экспертной системы вычислительного комплекса, выявление сочетаний параметров, уменьшающих безопасность корабля за счет учета дестабилизирующих составляющих человеческого фактора, и выработка для неограниченного числа, определенного количеством опасных ситуаций, упреждающих рекомендаций командному составу по обеспечению безопасности.
Однако данный способ интеллектуальной деятельности экипажа, при котором измеряются параметры движения корабля, работы технических средств, состояния внутренней среды и психофизического состояния операторов, не позволяет выявить факторные неопределенности процесса пилотирования на современных ЛА. В системе отсутствует расчет ограниченного прогноза развития АС с учетом запаса по критическому параметру, например времени невмешательства оператора в процесс управления, не обеспечивается полнота интеллектуальной поддержки по выводу из КС. В системе отсутствуют решения по предотвращению перехода аварийной ситуации в катастрофическую, если оператор по любым причинам не выполняет рекомендаций по выводу ЛА из КС, передаче управления на систему автоматического управления для предотвращения угрозы безопасности объекта.
Известен способ и устройство предупреждения критических режимов работы системы оператор-объект, см. патент РФ №2114456, G05В 13/00, 1996, при котором измеряют параметры состояния системы оператор-объект, запоминают опасные факторы, формируют показатель сложности управления, при необходимости формируют и выдают оператору команды для вывода систем оператор-объект из сложившейся ситуации, запоминают команды, соответствующие опасным факторам, определяют для каждого текущего опасного фактора приращение показателя сложности управления, определяют те текущие опасные факторы, для которых величина приращения показателя сложности управления превышает пороговое значение, и выдает оператору команды, соответствующие этим текущим опасным факторам, в последовательности, зависящей от величины указанных приращений показателя сложности управления. Пороговое значение задают в зависимости от величины показателя сложности управления, чем больше показатель сложности управления, тем выше пороговое значение. Показатель сложности управления формируют как вероятность ошибки оператора при действии текущих опасных факторов в приоритетной последовательности, формируют и выдают сигнал управления на средства автоматического управления объекта для перевода системы оператор-объект в состояние, характеризующееся допустимым уровнем показателя сложности управления. В основу патента положено решение задачи повышения эффективности (безопасности) функционирования системы оператор-объект путем предупреждения выхода системы на критические режимы полета.
Однако в устройстве и способе предупреждения критических режимов работы системы определяется приращение уровня сложности управления, превышающее пороговое значение. Уровень сложности управления в КС формируется только как вероятность ошибки оператора при действии текущих опасных факторов в приоритетной последовательности и далее выдается сигнал управления на средства автоматического управления объекта. При работе системы не учитывается запас критического параметра в случае допущения ошибки управления оператором. Учет правильности и своевременности его действий зависит от времени реакции человека, его превышения в допустимой ситуации, от критичности состояния оператора. Система на основе определения развития КС без учета запаса по критическому параметру - времени невмешательства летчика в процесс управления - не обеспечивает полноты советов по выводу из КС, не позволяет выявить факторные неопределенности процесса пилотирования и тем самым снижает уровень безопасности полета ЛА.
Известна система поддержки экипажа в опасных ситуациях при выходе из эксплуатационной области, патент на изобретение РФ №2128854 от 30.08.96, Берестов Л.М., Харин Е.Г. и др., включающая датчики состояния двигателей, топливной системы, гидросистемы, системы электроснабжения, системы штурвального управления, системы выпуска шасси и торможения, системы жизнеобеспечения, противообледенительной системы, противопожарной системы, системы автоматического управления, системы воздушных сигналов, системы самолетовождения, бортовой части спутниковой навигационной системы, бесплатформенной инерциальной навигационной системы, радиовысотомера, приборной системы посадки, радиотехнической системы ближней навигации, метеонавигационной радиолокационной станции, системы предупреждения критических режимов, соединенных с мультиплексным каналом информационного обмена, систему отображения информации, в нее введены база знаний, база данных, блок распознавания состояния конфигурации ЛА, блок распознавания режимов полета, анализатор состояния аппаратуры ЛА, анализатор состояния пилотажно-навигационного оборудования, блок распознавания аварийных ситуаций, блок прогноза, состоящий из связанных блоков моделирования динамики ЛА - бортового оборудования и БЗ развития аварийных ситуаций, связанных друг с другом БЗ характеристик аварийных ситуаций (АС) и БЗ предотвращения АС, вычислитель принятия решений с предотвращением АС, анализатор правильности действий по предотвращению АС, вычислитель принятия решений о переходе на автоматическое управление, блок предупреждения о нарушении правильности действий.
Однако данная система поддержки экипажа в опасных ситуациях, в которой анализируются нарушения правильности действий управления по предотвращению АС, ввиду отсутствия вычислений запасов по критическому параметру (например, по времени невмешательства летчика в процесс управления) не позволяет принимать окончательные решения по переходу на активное автоматическое управление по предотвращению критических ситуаций.
Известна «Система защиты самолета от ошибочных или умышленных действий, приводящих к катастрофе», Берестов Л.Б., Харин Е.Г. и др, патент РФ №2228885 7B64D, G08B 23/00, 15.11.2001, взятая за прототип.
Система предназначена для установки на гражданские ЛА, основана на использовании теории искусственного интеллекта с базами знаний и машинами логического вывода, является советчиком экипажу по управлению в критических ситуациях (КС). Система содержит датчики состояния бортовых систем, соединенных с каналом информационного обмена, штатную и аварийную системы управления ЛА, бортовую линию радиоуправления воздушным движением, три экспертные системы (ЭС), вычислитель момента блокировки экипажа, систему блокировки действий экипажа, вычислитель параметров движения ЛА, три переключателя.
Однако данная система с использованием ЭС на основе расчета только ограниченного времени прогноза развития КС без учета запаса по критическому параметру - по времени невмешательства летчика в процесс управления - не обеспечивает летчику полноту советов по выводу из КС и увеличения уровня безопасности полета ЛА.
Технический результат, на достижение которого направлено изобретение, заключается в обеспечении защиты гражданских самолетов от ошибок экипажа за счет парирования и вывода из катастрофических ситуаций (КС) на основе контроля времени, необходимого для данного режима полета и определения момента блокировки штатной системы управления ЛА.
Для достижения указанного технического результата в автоматизированную систему обеспечения безопасности полетов пилотируемого летательного аппарата, включающую бортовую линию радиоуправления, соединенную с наземной линией радиоуправления пункта управления воздушным движением, штатную систему управления ЛА, систему автоматического управления (САУ), соединенных с датчиками состояния бортовых систем, первую ЭС, выполненную с вычислительным блоком определения режима полета, соединенным с базой знаний (БЗ) по признакам режима полета, вторую ЭС, выполненную с блоком определения КС, соединенным с БЗ по КС, вычислитель параметров движения (ВПД) ЛА, связанный с входом вычислительного блока определения режима полета, выход которого соединен с вычислительным блоком определения катастрофической ситуации (КС), третью ЭС, выполненную с вычислительным блоком управления по выводу из КС (БУВ) и связанной с ним базой данных по виду управления вывода из КС, вычислительный блок момента блокировки экипажа, дополнительно введены четвертая ЭС с вычислительным блоком по определению времени невмешательства (БОВН) летчика в управление ЛА при КС за время to, соединенным с БЗ по режимам невмешательства летчика при КС в управление и датчиками состояния штатной системы управления ЛА. При этом вход вычислительного блока определения момента блокировки штатной системы управления ЛА соединен с выходом вычислительного блока определения времени невмешательства летчика, а выход соединен через пороговый двойной переключатель со вторым входом вычислительного блока управления по выводу (БУВ) из КС, а выход БУВ соединен с входом САУ. Причем индикатор летчика, установленный в кабине экипажа ЛА, связан с выходом блока определения КС, а второй выход порогового двойного переключателя соединен с датчиками состояния штатной системы управления ЛА. Таким образом, заявленная система повышает степень защиты гражданских самолетов от ошибок экипажа на основе контроля времени, необходимого для парировании катастрофических ситуаций (КС) в заданном режиме полета по инструкции «Руководство по летной эксплуатации (РЛЭ) ЛА».
Кроме того, обеспечивает снижение роли человеческого фактора в КС, повышает безопасность полета ЛА, при автоматическом управлении ЛА эффективно выполняет функции интеллектуальной поддержки экипажа по предотвращению катастрофических ситуаций.
Перечень фигур на чертежах.
Для пояснения сущности изобретения на фиг.1 представлена блок-схема предложенной системы обеспечения безопасности полета, где изображены:
1 - вычислитель параметров движения (ВПД) ЛА;
2, 5, 14, 9 - первая, вторая, третья, четвертая экспертные системы (ЭС);
3 - блок определения режима полета;
4 - база знаний (БЗ) по признакам режима полета;
6 - блок определения катастрофической ситуации (КС);
7 - БЗ по КС;
8 - индикатор летчика, установленный в кабине экипажа;
10 - блок определения времени невмешательства летчика в управление (БОВН) ЛА за время to;
11 - БЗ по режимам невмешательства летчика в управление;
12 - блок определения момента блокировки (БОМБ) ручного управления;
13 - пороговый двойной переключатель;
15 - блок управления по выводу из КС (БУВ);
16 - БЗ по виду управления выводом из КС;
17 - система автоматического управления (САУ) ЛА;
18 - штатная система управления ЛА.
На фиг.1 представлена блок-схема предложенной системы обеспечения безопасности полета. Заявленная система содержит бортовую линию радиоуправления, соединенную с наземной линией радиоуправления пункта управления воздушным движением, штатную систему управления ЛА 18, систему автоматического управления (САУ) 17, датчики состояния бортовых систем, соединенных с системой автоматического управления 17, вычислитель параметров движения ЛА 1. Первая ЭС 2 выполнена с вычислительным блоком 3 определения режимов полета, первым входом соединенным с БЗ 4 по признакам движения ЛА, вторым входом связанным с вычислителем параметров движения (ВПД) ЛА 1, а выходом связанным с первым входом второй ЭС 5. Вторая ЭС 5 выполнена с блоком 6 определения КС, первым входом соединенным с БЗ 7 по КС, вторым входом - с выходом ВПД 1, а выходом соединенным с первым входом блока 10 определения времени невмешательства летчика в управление (БОВН) четвертой ЭС 9 и индикатором 8 летчика в кабине экипажа. Второй вход блока БОВН 10 связан с БЗ 11 по режимам невмешательства летчика в управление, третий вход связан с датчиками параметров штатной системы управления (ШСУ) 18 ЛА. Выход блока 10 БОВН соединен с входом блока 12 (БОМБ), выход которого связан с входом порогового двойного переключателя 13 (ПДП). Первый выход блока 13 ЦДЛ соединен с ШСУ 18 ЛА, второй выход ПДП 13 связан с входом блока 15 управления по выводу (БУВ) из КС третьей ЭС 14. Второй вход блока БУВ 15 соединен с выходом БЗ 16 по выводу из КС, а выход блока БУВ 15 по выводу из КС связан с САУ 17 ЛА.
Заявленная система работает следующим образом.
Заявленная система основана на логике работы летчика-инструктора. В системе определяются моменты времени, когда без вмешательства в управление системой невозможно предотвратить катастрофу, что достигается установкой блока 10 БОВН, а оценки возможности предотвращения КС выполняются с помощью блока 11 БЗ по режимам невмешательства летчика в управление. Система заменяет эксперта-оператора при решении задач по автоматическому управлению для предотвращения КС, вызванной умышленными или ошибочными действиями по управлению из кабины экипажа. Для этого введены операции:
- определение времени невмешательства летчика при фактическом положении рычагов и органов управления движением ЛА с целью недопущения КС;
- инженерный анализ по определению на каждом режиме неправильных действий экипажа, приводящих к появлению КС;
- индикации летчику символов превышения ограничений параметров полета по РЛЭ, например «нажми на правую педаль δН», чтобы не допустить попадание ЛА в режим сваливания.
Структура заявляемой системы должна обеспечить следующие операции экспертной системы.
1. Определение вида режима - Ri.
2. Определение для режима Ri перечня возможных для него КС, критических параметров - Xкрит. i для каждого КС и запаса по критическому параметру - Xкрит. без, который нельзя превысить в целях безопасности. При этом используются также данные о координатах ЛА, полученные из пилотажно-навигационного оборудования (ПНО) самолета, и цифровая карта местности для определения безопасной высоты полета над местностью и объектами на земле.
3. Определение наличия КС, который появляется для режима Ri.
4. Определение вида управления uнед для КС, которое обеспечит недопущение данного вида КС.
5. Формирование управления uвыв для вывода ЛА на исходный автоматический режим полета.
6. Формирование автоматического управления полета в зону определенного УВД аэродрома и выполнение захода и посадки - uаэр.
Для решения перечисленных задач используются следующие базы знаний:
- БЗ1 - по типам режимов, их признакам (2);
- БЗ2 - по катастрофическим ситуациям (виды КС, критические параметры, признаки, управление по недопущению КС) (5);
- БЗ3 - по определению времени невмешательства летчика при КС (14 ЭС);
- БЗ4 - по виду управления по выводу из КС (9 ЭС).
Логика работы заявленной системы использует последовательность решаемых задач:
1. Непрерывное определение типа режима, на котором находится самолет на основе базы знаний по видам штатных и нештатных режимов и их признаков.
2. По типу режима на основе базы знаний по видам катастрофических ситуаций и базы данных по цифровой карте местности определяются: набор КС и их признаков для данного режима; критический параметр Xкрит для каждого КС, превышение которого приводит к возникновению КС, и запас по критическому параметру
Xкрит.без, который рекомендуется не превышать в целях безопасности. Это вполне справедливо для ряда ситуаций, например сваливание, штопор, пожар. Однако летчику необходимо дать возможность управлять самолетом, когда есть возможность предотвратить наступление КС при завершении маневра, например при предотвращении столкновения с другим ЛА, с землей, ухода от зоны сдвига ветра или молниеопасной зоны и др.
3. В процессе управления по п.п.2 оценивается запас по критическому параметру ΔX. В тот момент, когда ΔХ=ΔXкрит.без должна осуществляться блокировка управления в кабине экипажа и переход на автоматическое управление по командам рассматриваемой системы.
4. Автоматическое управление самолетом по командам системы, реализующей управление по предотвращению КС и по выводу самолета в исходный режим.
5. Блокировка управления из кабины экипажа и реализация автоматизированного захода и посадки самолета на ближайший аэродром, выбранный на основе соответствующей базы данных или заданный с наземного пункта УВД. Этот режим включается при условиях, когда должна обеспечиваться посадка на аэродром не ниже II категории ИКАО. Рассматривается автономный вариант автоматизированной посадки, когда полет по маршруту, снижение, полет в зоне аэродрома и посадка осуществляется системой автоматического управления самолетом.
6. Блокировка управления предполагает варианты реализации этой функции: стопорение рычагов управления; отключение электрических сигналов, пропорциональных отклонению рычагов управления; суммирование этих сигналов с сигналами противоположного знака; блокировка защитных колпаков над тумблерами и т.д.
Однако при блокировке системы ручного управления ЛА в соответствии с логикой п.п.3, 5 могут произойти необратимые события, которые не смогут быть парированы предлагаемой системой. Например, если на взлете после отрыва перекрыть топливные краны всех двигателей, двигатели будут выключены и катастрофа неизбежна, так как для их запуска требуется определенное время, за которое самолет столкнется с землей. Точно так же, например, должны блокироваться сигналы управления для начала взлета (увеличение тяги двигателей, отпуск тормозов), если вес или центровка самолета, или уровень обледенения частей самолета или ВПП не обеспечит безопасный взлет. Поэтому при установке предлагаемой системы такие каналы управления выполняются дистанционными с задержкой исполнения управляющей команды на время, необходимое БЦВМ реализовать циклы в соответствии с п.п.1-5.
7. Связь с наземным пунктом УВД требует реализации радиокомандной линии связи для выполнения следующих функций.
Командные сигналы с наземного пункта УВД.
Команда на блокировку управления из кабины экипажа и выполнение автоматической посадки на ближайший аэродром; указание аэродрома посадки; смена эшелона; уклонение от столкновения; указание ВПП; уход на второй круг.
Как дополнительный вариант (в п.4) может рассматриваться передача на борт самолета командных сигналов на выполнение отдельных режимов.
Работа рассматриваемой системы, являющейся экспертной системой, которая работает не по жестким алгоритмам (как система автоматического управления), а работает по алгоритмам, выбираемым по определенным правилам из базы знаний. Система этих правил и базы знаний строится на основе знаний экспертов. Система защиты самолета от ошибочных управляющих действий из кабины экипажа строится на использовании баз знаний 4, 7, 11, 16.
База знаний по признакам режима полета (4).
Виды режимов включают как типовые режимы (взлет, набор высоты, снижение, крейсерский режим, разворот, полет по кругу, заход на посадку, посадка), так и нештатные (полет с отказавшими одним или несколькими двигателями; полет с отказавшими системами; полет в условиях обледенения, сильного дождя, сдвига ветра; сваливание; штопор; полет при пожаре на борту; полет при нештатной конфигурации; автоматическое сопровождение с использованием цифровых карт местности).
Для каждого типа режима определяются характеризующие их признаки (параметры движения, параметры управления, конфигурация, состояние двигателей и систем самолета, внешние возмущения).
Для каждого режима определяется время при фактическом положении органов управления и прогноза движения по выводу из катастрофической ситуации. Это время определяется для каждого вида режима по времени, необходимому для вывода из катастрофических ситуаций, возможных для данного режима, и по управлению, которое приводит к катастрофической ситуации. Например, для крейсерского режима это время будет разное для случая полного отклонения руля высоты и для случая торможения после уборки газа всех двигателей при сохранении высоты.
База знаний по катастрофическим ситуациям (7).
Для каждого режима составляется перечень катастрофических ситуаций, которые могут появиться вследствие ошибочных (неумышленных или умышленных) управляющих действий из кабины экипажа. При этом рассматриваются управляющие действия как при выполнении штатных режимов полета, так и режимов с отказами силовой установки и систем самолета, разгерметизации, пожаре, обледенении, сдвига ветра, сильном дожде, опасном сближении с другим самолетом и др.
База знаний по КС, возможным для каждого этапа полета, включает в себя базы знаний по перечню КС и рекомендуемому из соображений безопасности минимально допустимому запасу по критическому параметру при предотвращении КС.
База знаний по перечню катастрофических ситуаций для каждого режима полета формируется на основе следующих фрагментов:
- анализа статистики летных происшествий;
- инженерного анализа по выявлению возможных отказов самолетных систем и силовой установки, выполняемых при сертификации самолета;
- инженерного анализа по выявлению возможных ошибочных действий по управлению из кабины экипажа, приводящих к КС.
База знаний по признакам КС формируется для КС каждого режима полета следующим образом. В первую очередь в перечень признаков каждого КС входит критический параметр и его контрольное значение. Далее в зависимости от режима полета и вида КС в указанный перечень входят: параметры управления, конфигурация, вес, центровка, факт отказного состояния систем самолета, внешние возмущения (ветер, обледенение, молния и т.д.), определенные параметры движения (например, угол атаки при попадании в штопор), рельеф местности, параметры полета самолета, с которыми возможно опасное сближение и др.
База знаний по критическому параметру КС формируется на основе определения параметра, превышение (или уменьшение) которого приводит к разрушению самолета при рассмотрении каждого конкретного случая наступления КС. Разрушение самолета может быть связано с пожаром, в этом случае критический параметр - время пожара.
База знаний по виду управления вывода из КС 16 позволяет как можно быстрее предотвратить приближение критического параметра к его контрольному значению и вывести самолет в исходный штатный режим полета. Вывод самолета в исходный режим после предотвращения наступления КС сложности не представляет и решается на основе алгоритмов штатной САУ. Определение вида управления по предотвращению КС осуществляется следующими способами:
- определение оптимального управления, что требует больших усилий и не всегда может быть реализовано;
- определение рациональной стратегии управления на основе математического моделирования, полетов на пилотажных стендах и тренажерах, летных испытаний;
- использование существующих баз знаний (например, использование базы знаний по методам вывода из штопора в зависимости от вида штопора);
- результаты инженерного анализа, которые касаются, в основном, разовых команд управления (например, команды на своевременное изменение конфигурации).
Организация решения задач в многозадачном программном комплексе заявленной системы предполагает определение последовательности решения задач с их зацикливанием для однотипных информационных режимов, хранение и передачу информации между устройствами памяти и процессорами. Система работает в реальном масштабе времени.
Данная автоматизированная система обеспечения безопасности полетов пилотируемого летательного аппарата необходима для формирования бортового оборудования самолетостроительных ОКБ им. Туполева, им. Ильюшина. Подобных систем в указанных организациях не было.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ ВЫСОКОИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2339547C9 |
| АВТОМАТИЗИРОВАННАЯ ВЫСОКОИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2388663C1 |
| СИСТЕМА ЗАЩИТЫ САМОЛЕТА ОТ ОШИБОЧНЫХ ИЛИ УМЫШЛЕННЫХ ДЕЙСТВИЙ, ПРИВОДЯЩИХ К КАТАСТРОФЕ | 2001 |
|
RU2228885C2 |
| ПИЛОТАЖНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС | 2004 |
|
RU2263973C1 |
| СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА В ОПАСНЫХ СИТУАЦИЯХ | 1996 |
|
RU2128854C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
| СИСТЕМА ИНТЕГРИРОВАННОГО КОНТРОЛЯ РАБОТЫ БОРТОВОГО ОБОРУДОВАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2431175C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| СИСТЕМА ПОДДЕРЖКИ ПРИНЯТИЯ РЕШЕНИЙ ЭКИПАЖА ВОЗДУШНОГО СУДНА ПО ПРЕДОТВРАЩЕНИЮ ОСОБЫХ СИТУАЦИЙ | 2008 |
|
RU2386569C2 |
| Блок интеллектуальной поддержки | 2020 |
|
RU2770996C1 |
Изобретение относится к области авиационного бортового оборудования и предназначено для установки на гражданские летательные аппараты (ЛА). Система включает бортовую линию радиоуправления, соединенную с наземной линией радиоуправления пункта управления воздушным движением, штатную систему управления ЛА (18), систему автоматического управления (САУ) (17), соединенные с датчиками состояния бортовых систем, первую экспертную систему (ЭС) (2) с вычислительным блоком определения режима полета (3), соединенным с базой знаний (БЗ) по признакам режима полета (4), вторую ЭС (5) с блоком определения катастрофической ситуации (КС) (6), соединенным с БЗ по КС (7), вычислитель параметров движения (ВПД) ЛА (1), третью ЭС (14) с вычислительным блоком управления по выводу из КС (15) и базу данных по виду управления вывода из КС (16), вычислительный блок момента блокировки экипажа (12), четвертую ЭС с вычислительным блоком по определению времени невмешательства (БОВН) летчика в управление ЛА при КС за время to (10), соединенным с БЗ по режимам невмешательства летчика при КС в управление (11), пороговый двойной переключатель (13), индикатор летчика (8). Достигается повышение степени защиты гражданских самолетов от ошибок экипажа. 1 ил.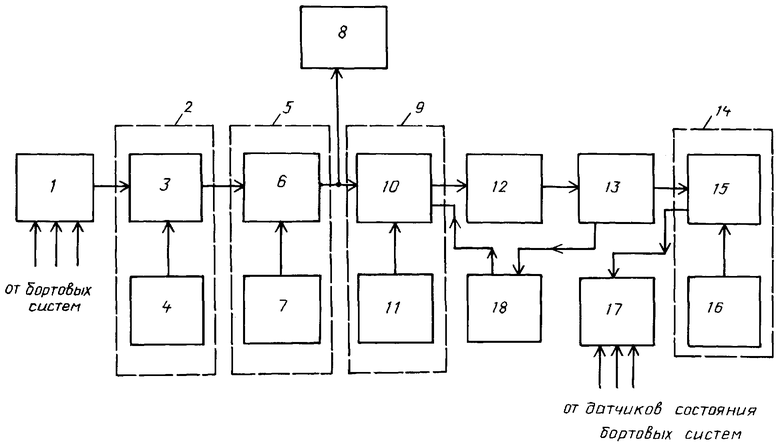
Автоматизированная система обеспечения безопасности полетов пилотируемого летательного аппарата, включающая бортовую линию радиоуправления, соединенную с наземной линией радиоуправления пункта управления воздушным движением, штатную систему управления ЛА, систему автоматического управления (САУ), соединенные с датчиками состояния бортовых систем, первую экспертную систему, выполненную с вычислительным блоком определения режима полета, соединенным с базой знаний по признакам режима полета, вторую экспертную систему, выполненную с блоком определения катастрофической ситуации, соединенным с базой знаний по катастрофической ситуации, вычислитель параметров движения ЛА, связанный с входом вычислительного блока определения режима полета, выход которого соединен с вычислительным блоком определения катастрофической ситуации, третью экспертную систему, выполненную с вычислительным блоком управления по выводу из катастрофической ситуации и связанной с ним базой данных по виду управления вывода из катастрофической ситуации, вычислительный блок момента блокировки экипажа, отличающаяся тем, что в нее введены четвертая экспертная система с вычислительным блоком по определению времени невмешательства летчика в управление ЛА при катастрофической ситуации за время to, соединенным с базой знаний по режимам невмешательства летчика при катастрофической ситуации в управление и датчиками состояния штатной системы управления ЛА, при этом вход вычислительного блока определения момента блокировки штатной системы управления ЛА соединен с выходом вычислительного блока определения времени невмешательства летчика, а выход соединен через пороговый двойной переключатель с вторым входом вычислительного блока управления по выводу из катастрофической ситуации, а выход блока управления по выводу соединен с входом САУ, причем индикатор летчика, установленный в кабине экипажа ЛА, связан с выходом блока определения катастрофической ситуации, а второй выход порогового двойного переключателя соединен с датчиками состояния штатной системы управления ЛА.
| СИСТЕМА ЗАЩИТЫ САМОЛЕТА ОТ ОШИБОЧНЫХ ИЛИ УМЫШЛЕННЫХ ДЕЙСТВИЙ, ПРИВОДЯЩИХ К КАТАСТРОФЕ | 2001 |
|
RU2228885C2 |
| СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА В ОПАСНЫХ СИТУАЦИЯХ | 1996 |
|
RU2128854C1 |
| WO 03079129 A1, 25.09.2003 | |||
| US 5200901 A, 06.04.1993 | |||
| JP 5278694 A, 26.10.1993. | |||

