Изобретение относится к геоэлектроразведке и может использоваться для измерения распределения удельного электрического сопротивления в верхней части земной коры. Способ предназначен для поиска и разведки пресных и соленых вод, обнаружения инженерных коммуникаций и захоронений промышленных отходов, экологического мониторинга, изучения антропогенного и техногенного воздействия и др.
Применяемые в настоящее время способы решения подобных задач по своей принципиальной сущности и структурной основе, как правило, выполняются единообразно и имеют генераторную часть и приемные индуктивные катушки (датчики). Геометрические центры генераторной и приемных катушек расположены на одной прямой. Датчики могут перемещаться друг относительно друга. Обладая внешними схожими конструктивными данными, такая поисковая геофизическая аппаратура имеет различные результаты измерений и расчетную достоверность в зависимости от способа проведения работ.
Геофизические работы состоят из многих этапов, одним из которых является выбор рабочей гипотезы для выполнения задачи. Например, при построении карты обводнения грунта на некоторой территории или поиске металлического объекта необходимо оценить глубину залегания изучаемого объекта, его физические свойства и характерные размеры. В соответствии с задачей зондирования определяются технические средства ее решения, в первую очередь необходимый частотный диапазон.
Процесс измерительных операций включает процедуру компенсации сигнала от прямого магнитного поля генератора, измерение компонент вторичного магнитного поля, учет нестабильности тока в генераторной катушке. В настоящее время известны многочисленные технические средства для выполнения геофизических исследований с помощью создания искусственных электромагнитных полей на многих частотах.
В одном из известных способов многочастотного электромагнитного зондирования [1] на земной поверхности в пункте передачи сигнала возбуждают переменное электромагнитное поле. В пункте приема сигнала измеряют отношение вертикальной и горизонтальной магнитных компонент переменного электромагнитного поля. При изменении частоты поля изменяют расстояние между пунктами передачи и приема сигнала. Далее повторяют измерения в интервале частот и расстояний и определяют параметры геоэлектрического разреза между пунктами передачи и приема сигнала. В данном способе частично решена задача повышения точности определения параметров геоэлектрического разреза. Для этого изменением частоты поддерживают постоянным отношение вертикальной и горизонтальной компонент переменного магнитного поля в пункте приема сигнала и по изменению частоты в интервале расстояний определяют параметры геологического разреза.
Известен способ [2] определения аномальной проводимости среды по регистрации реальной и мнимой частей сигналов двух приемных датчиков вторичного магнитного поля, в котором удается приблизиться к оптимальным условиям возбуждения первичного поля при изменении глубины залегания искомого проводящего тела. Обычным путем создают электромагнитное поле, фиксируемое двумя приемными датчиками, расположенными в ортогональных плоскостях. Причем один из них максимально связывают по электромагнитному полю с излучателем поля, а второй электрически развязывают с излучающей рамкой. В облучаемой исследуемой среде и в сильно проводящих объектах создаются вихревые токи, которые своим магнитным полем (вторичным полем) в развязанном от генератора приемнике создают параметрический сигнал, мнимая часть которого пропорциональна реактивной составляющей вторичного магнитного поля, а реальная - активной составляющей. Для оценки амплитудно-фазовых соотношений применена фазочувствительная схема с функциями корректора, расщепителя, детектора и др. Для оптимизации возбуждения поля в объектах, залегающих на различной глубине, несущая рама имеет раздвижную конструкцию.
Наиболее близким техническим решением является известный способ высокочастотного индукционного каротажа, где изучение геологической среды выполняется с помощью трехкатушечного зонда [3, стр. 44]. В измерительной цепи приемные датчики включены встречно, компенсация прямого поля в воздухе обеспечивается условием  , где N1 и N2 - моменты приемных датчиков, L1 и L2 - расстояния от центра генераторной петли до датчиков. В данном способе для каждой рабочей частоты применяется свой трехкатушечный зонд. Таким образом, для обеспечения частотного зондирования необходимо применять количество зондов, равное количеству частот. Зонды объединяются в многозондовое устройство. При перемещении устройства в скважине измеряемые на каждой частоте сигналы представляют собой данные профилирования, а измерения разными зондами в одной точке профиля составляют кривую зондирования.
, где N1 и N2 - моменты приемных датчиков, L1 и L2 - расстояния от центра генераторной петли до датчиков. В данном способе для каждой рабочей частоты применяется свой трехкатушечный зонд. Таким образом, для обеспечения частотного зондирования необходимо применять количество зондов, равное количеству частот. Зонды объединяются в многозондовое устройство. При перемещении устройства в скважине измеряемые на каждой частоте сигналы представляют собой данные профилирования, а измерения разными зондами в одной точке профиля составляют кривую зондирования.
Существенным ограничением применения известных способов зондирований является частотная зависимость моментов датчиков со сплошными ферритовыми сердечниками. Этот эффект приводит к тому, что используется одна рабочая частота при фиксированном положении датчиков, или необходимо осуществлять перемещение датчиков при смене частоты для восстановления компенсации прямого поля. Несмотря на большое количество имеющихся средств зондирований существует потребность в способе, обладающем универсальными свойствами в исследовании широкого круга задач и свободном от необходимости механического совмещения многих зондов, изменения расстояний между генераторной частью и приемниками сигнала во время измерений над исследуемой поверхностью, а также от каких-либо других технологических передвижений катушек.
Предложенный способ индукционного частотного зондирования решает некоторые из таких потребностей - повышает эффективность широкого перечня электроразведочных работ и снижает их трудоемкость. Способ состоит в следующем.
Создают переменное магнитное поле последовательно на многих частотах. На каждой частоте выполняют измерение реальной и мнимой компонент вторичного магнитного поля двумя приемными датчиками, расположенными вдоль одной прямой с генераторной петлей. Сигнал от прямого поля предварительно компенсируют на средней частоте диапазона, соблюдая условие равенства отношения момента первого датчика к кубу расстояния от центра генераторной петли до центра первого датчика и отношения этих же величин для второго датчика. В предлагаемом способе осуществлять зондирование в широком диапазоне частот при фиксированном положении генераторной и измерительных катушек позволяет стабилизация магнитных моментов приемных датчиков. Для этого применяют необходимый набор ферритовых сердечников в виде полых цилиндров с толщиной стенки hф удовлетворяющей неравенству
hф<h3,
где h - толщина скин-слоя электромагнитного поля в материале сердечника при наибольшей частоте выбранного частотного диапазона.
Для контроля функционирования аппаратуры и измерения величины тока в генераторной катушке измеряют величину прямого поля генератора тем же измерительным трактом, что и полезный сигнал.
Новыми предложенными признаками являются совокупность признаков формулы изобретения. Принципиально они относятся к следующим операциям: предварительно выполняют компенсацию сигнала прямого поля на средней частоте диапазона из условия равенства отношения M1/r1 3 = M2/r2 3;
фиксируют расстояния между генератором и приемными датчиками; стабилизируют величины магнитных моментов приемных датчиков в интервале рабочих частот подбором приемных датчиков, таких у которых толщина стенки полого цилиндрического ферритового сердечника каждого датчика меньше одной трети толщины скин-слоя электромагнитного поля на наивысшей рабочей частоте в материале сердечника.
Данные операции способа являются принципиальными и определяют качественную сторону проведения геофизических работ.
Дополнительный признак обусловлен необходимостью учета величины тока в генераторной петле при численной интерпретации полученных данных. Кроме того, измерение тока позволяет своевременно корректировать аппаратурную нестабильность.
Сущность предложенного способа и его техническая реализация иллюстрируется чертежом, на котором приведена структурная схема, включающая наиболее общие функциональные части.
Перестраиваемый генератор 1 закреплен на одной стороне жесткой несущей штанги 2. На другой стороне штанги установлены приемные датчики 3 и 4. Все элементы зонда (1, 3, 4) через кабель 5 соединены с электронным блоком 6, включающим узлы управления, преобразования, питания и компьютер. На чертеже обозначены: Мг - магнитный момент генераторной петли, М1 и M2 - моменты приемных датчиков. Расстояния между генератором и приемными датчиками r1 и r2 значительно больше размеров датчиков, что дает возможность применить дипольное приближение для расчета электромагнитного поля аппаратуры.
Основой примененного метода измерений полезного сигнала является синхронное детектирование на фоне компенсированного сигнала прямого поля.
Частотное зондирование представляет, в общем подходе, исследования электропроводящих сред или объектов с помощью искусственного переменного электромагнитного поля, изменяющаяся частота которого определяет глубину исследования при постоянном разносе между генераторными и приемными петлями. Расчет кажущегося сопротивления среды ведется по формуле  где ρf - значение кажущегося удельного сопротивления среды на данной частоте (Ом•м); Kf- геометрический коэффициент установки,
где ρf - значение кажущегося удельного сопротивления среды на данной частоте (Ом•м); Kf- геометрический коэффициент установки,  - модуль величины разности ЭДС в приемных датчиках (В); If - сила тока в генераторной петле (А). Коэффициент установки определяется специальными метрологическими способами. Глубина зондирования пропорциональна скин-слою электромагнитного поля в среде: h = 503
- модуль величины разности ЭДС в приемных датчиках (В); If - сила тока в генераторной петле (А). Коэффициент установки определяется специальными метрологическими способами. Глубина зондирования пропорциональна скин-слою электромагнитного поля в среде: h = 503  , где f - рабочая частота (Гц) ρ - удельное электрическое сопротивление среды (Ом•м).
, где f - рабочая частота (Гц) ρ - удельное электрическое сопротивление среды (Ом•м).
Процесс зондирования включает следующие значительные операционные признаки: компьютерное управление процессом; компьютерная обработка результатов измерений по определенным программам; электронное сопряжение узлов и преобразование сигналов; генераторно-приемные процедуры. Если все группы обеспечены механическими, электронными и пр. средствами, а первые две - программными и операционными средствами, то последняя группа в настоящее время имеет ряд проблем, связанных с натурными открытыми измерениями. При этом способ измерения очень малых сигналов на фоне значительного уровня прямого поля, а также в условиях возможной нестабильности излучателя переменного магнитного поля требует введения дополнительных процедур. Для достижения компенсации сигнала от прямого поля выполняют измерение разности сигналов с двух датчиков, размещенных таким образом, чтобы выполнялось равенство: М1/r1 3 = М2 /r2 3, здесь М1 и M2- магнитные моменты приемных датчиков, r1 и r2 - расстояния от генераторного диполя до датчиков. Такое условие компенсации является точным. Однако осуществление частотного электромагнитного зондирования с применением одного генераторного и двух приемных диполей с фиксированным расстоянием между ними требует стабильности моментов приемных диполей при работе на всех частотах диапазона.
Если ферритовые сердечники в приемных преобразователях изменения магнитного поля в ЭДС выполнены сплошными и имеют значительные поперечные сечения, то это приводит, при достижении наибольшей чувствительности, к зависимости величины момента от рабочей частоты. Изменение величин моментов приемных датчиков в процессе зондирования приводит к нарушению компенсации прямого поля, что ведет к появлению большого неинформативного сигнала в измерительном тракте аппаратуры. Изменение этих параметров приводит к потере чувствительности измерений и ведет к уменьшению точности результатов зондирований. Необходимость повышения точности и уровня полезного сигнала, в конечном виде - получение максимальной чувствительности, потребовали обратить внимание на активные нестационарные элементы датчиков. Сущность такого операционного признака заключается в следующем. Для получения наибольшей чувствительности при конкретных физических условиях выполнения работ потребовалось в процесс измерения ввести защищаемые операции.
Предварительно компенсируют сигнал прямого поля на средней частоте диапазона из условия равенства отношений: М1/r1 3 = M2/r2 3.
Для ликвидации непостоянства аппаратурных параметров и повышения эффективности зондирований предусмотрено сохранять расстояния между приемными и генераторными диполями.
Для работы в конкретном частотном диапазоне производится подбор приемных датчиков так, чтобы толщина стенки цилиндрического ферритового сердечника в них была бы не менее чем в три раза меньше толщины скин-слоя электромагнитного поля применяемых частот в материале сердечника. Эта величина определяется высшей частотой рабочего диапазона, определяемого задачей зондирований. При выполнении этого условия будет реализована максимальная чувствительность аппаратуры при стабилизированных магнитных моментах приемных датчиков, что обеспечит высокий уровень компенсации прямого поля в интервале рабочих частот.
Дополнительная операция - это определение величины тока в генераторной петле посредством измерения сигнала от прямого магнитного поля генератора тем же измерительным трактом, которым измеряют полезный сигнал.
Авторским коллективом создан опытный образец аппаратуры, работающий по описанному способу. Общий вид устройства представлен на фотографии. Аппаратура выдержала полевые испытания и проходит опытную эксплуатацию в научно-исследовательских целях. Зондирования по предлагаемому способу, где количество рабочих частот больше числа определяемых параметров среды, позволяет определять геометрические размеры проводящих объектов, находящихся в грунте на глубине, превышающей несколько длин зонда.
Литература
1. Авторское свидетельство СССР, N 1157504, G 01 V 3/06, Приоритет 23.08.79.
2. Авторское свидетельство СССР, N 1746227, G 01 V 3/11, Приоритет 16.10.89.
3. Антонов Ю.Н., Приворотский Б.И. Высокочастотный индукционный каротаж. - Новосибирск: "Наука". - 1975. - 260 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИНДУКЦИОННОГО ЧАСТОТНОГО ЗОНДИРОВАНИЯ | 2011 |
|
RU2502092C2 |
| СПОСОБ КАЛИБРОВКИ УСТРОЙСТВА ДЛЯ НАЗЕМНОГО ЭЛЕКТРОМАГНИТНОГО ИНДУКЦИОННОГО ЧАСТОТНОГО ЗОНДИРОВАНИЯ | 2010 |
|
RU2461850C2 |
| СПОСОБ ПОДАВЛЕНИЯ СИГНАЛА ПРЯМОГО ПОЛЯ В ЭЛЕКТРОМАГНИТНОМ ИНДУКЦИОННОМ ЗОНДИРОВАНИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2818011C1 |
| ИНДУКТИВНЫЙ СПОСОБ ЭЛЕКТРОМАГНИТНОГО МОНИТОРИНГА ПРОЦЕССА ОТТАЙКИ ГРУНТА | 1997 |
|
RU2156986C2 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОМАГНИТНОГО КАРОТАЖА СКВАЖИН | 1994 |
|
RU2063053C1 |
| СПОСОБ ИНДУКЦИОННОГО ВЕРТИКАЛЬНОГО ЗОНДИРОВАНИЯ | 1998 |
|
RU2156987C2 |
| ИНДУКТИВНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ВАРИАЦИЙ ЭЛЕКТРОСОПРОТИВЛЕНИЯ ГЕОЛОГИЧЕСКОЙ СРЕДЫ | 1995 |
|
RU2093862C1 |
| УСТРОЙСТВО ДЛЯ ГЕОЭЛЕКТРОРАЗВЕДКИ | 1998 |
|
RU2158940C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ИМПЕДАНСА ЗЕМНОЙ КОРЫ В СВЕРХНИЗКОЧАСТОТНОМ ДИАПАЗОНЕ РАДИОВОЛН | 1988 |
|
SU1840791A1 |
| СПОСОБ ЧАСТОТНО-ДИСТАНЦИОННЫХ ЗОНДИРОВАНИЙ | 1993 |
|
RU2072537C1 |
Способ предназначен для решения задач инженерной геофизики. Сущность способа состоит в следующем. Создается переменное магнитное поле последовательно на многих частотах. На каждой частоте выполняется измерение реальной и мнимой компонент вторичного магнитного поля двумя приемными датчиками, расположенными вдоль одной прямой с генераторной петлей. Сигнал прямого поля компенсируется путем применения двух встречно включенных приемных датчиков при условии, что на средней частоте рабочего диапазона отношение магнитного момента первого датчика к кубу расстояния от центра первого датчика до центра генераторной петли равно отношению этих же величин для второго датчика. Моменты приемных датчиков стабилизируются в интервале рабочих частот путем выбора толщины стенки цилиндрического ферритового сердечника каждого датчика, равной третьей части толщины скин-слоя электромагнитного поля в материале сердечника. Стабилизация моментов позволяет жестко зафиксировать положение датчиков относительно генераторной петли. 1 з.п. ф-лы, 1 ил.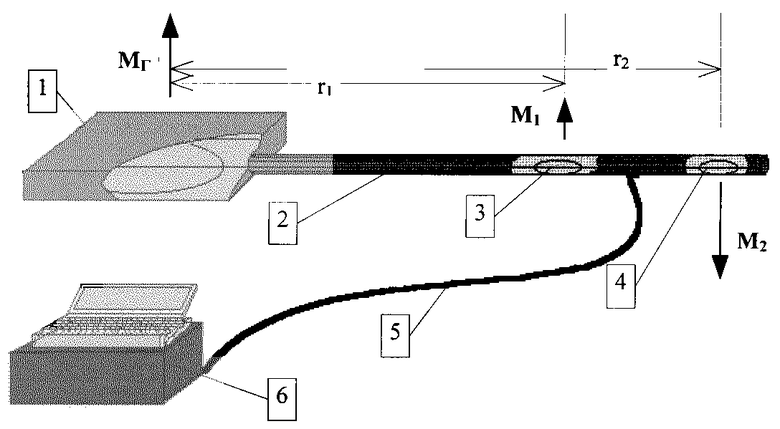
| Способ многочастотного электромагнитного зондирования | 1979 |
|
SU1157504A1 |
| Устройство для трассирования заглубленных трубопроводов | 1989 |
|
SU1746227A1 |
| Автоматическое устройство для устранения коротких замыканий в селеновых элементах | 1950 |
|
SU91034A2 |
| US 4486712 А, 04.12.1984 | |||
| US 3706025 А, 12.12.1972. | |||
