Изобретение относится к области геодезии и, в частности, к оптико-электронным приборам и может быть использовано техническими службами метрополитена для обнаружения и измерения негабаритности размещения оборудования и измерения профилей туннелей.
Известен механический способ контроля негабаритности с помощью сигнальных рам, заключающийся в том, что о негабаритности туннеля судят по деформации специальных рам, например из бумаги1. Недостатком способа является низкая точность измерений (допуск - не выше 5 мм), возможность повреждения оборудования рамами, а также недолговечность рам.
Известен также способ контроля внутренних поверхностей труб, частично решающий эту проблему, и устройство для его осуществления, включающие подсветку внутренней поверхности трубы, построение изображения подвижного кольцевого участка и суждение о состоянии поверхности по построенному изображению, подсветку осуществляют излучением лазера с помощью панорамной линзы, изображение строится с помощью такой же панорамной линзы в обратном ходе лучей2.
Недостатками данного технического решения являются невозможность производить количественные измерения, а только визуальный контроль, и возможность контроля только труб небольшого диаметра (не более 50 см).
Наиболее близким по технической сущности и достигаемому результату является способ контроля внутренней поверхности полости, включающий подсветку внутренней поверхности полости, визирование подсвеченного участка, суждение о состоянии поверхности по полученному изображению.
Устройство для контроля внутренней полости, реализующее данный способ, содержит источник подсветки, оптическую систему, создающую изображение подсвеченного участка по контуру, приемник излучения, преобразующий изображение в электрический сигнал, подсветку осуществляют лазером, излучение которого формируется с помощью конического отражателя, изображение строится с помощью оптической системы, включающей зеркальный объектив, компенсатор кривизны изображения и линзовый объектив камеры, прием изображения осуществляется с помощью приемника излучения, установленного на продольной оси трубы внутренней полости по полученному изображению, по степени и форме искажения полученного кольцевого изображения сечения пучком лучей поверхности трубы судят о состоянии поверхности. Глубина дефекта вычисляется в соответствии с математической зависимостью, связывающей углы подсветки и приема излучения и измеренную величину искривления кольцевого изображения3. Недостатками данного технического решения являются невозможность координатной привязки обнаруженного дефекта к оси трубы, низкая оперативность контроля.
Целью изобретения является обеспечение абсолютных координатных измерений габаритов туннелей, при которых результат измерения в комплексном виде содержит:
- сведения о вхождении оборудования в габариты приближения;
- измерение величины вхождения;
- опознавание входящего элемента;
- измерение координат элемента, входящего в габариты системы координат, связанных с туннелем.
Изобретение решает задачи расширения функциональных возможностей и повышения качества контроля и его точности, вхождение предметов в определенную зону туннеля с заданными габаритами, по которой проходят поезда.
Способ включает подсветку поверхности туннеля узким световым пучком, визирование очертаний подсвеченного участка туннеля (контура сканирования), сопоставление контура сканирования с эталоном (очертанием габарита приближения оборудования), измерение отклонений контура сканирования от эталона. Устройство имеет источник подсветки, оптическую систему и телевизионный приемник излучения. В качестве источника подсветки используют лазер, снабженный сканирующей системой с зеркальным отражателем. Оптическая система выполнена с возможностью проецирования контура сканирования на телевизионный приемник.
Способ реализуется следующим образом.
В известном способе контроля внутренней поверхности, включающем подсветку внутренней поверхности туннеля лазерным источником в форме сечения контролируемой поверхности световым конусом, формирование изображения подсвеченного участка на приемнике излучения, суждение о состоянии поверхности по степени и форме искажения полученного изображения, согласно изобретению полученное изображение сравнивают с эталоном, пространственные координаты которого приведены к опорным точкам полости, для чего измеряют:
расстояние между точкой пересечения поверхности сканирующего зеркала системы формирования конического пучка и центром входного зрачка приемной оптической системы - d,
угол при вершине светового конуса - σ,
угол визирования, определяемый как угол между осью полости туннеля и направлением визирования - β,
расстояние от оси полости до точки эталона в направлении визирования - ro.
А суждение о состоянии поверхности и измерение отклонений от габарита приближения оборудования осуществляют в соответствии со следующим соотношением.
Для решения поставленной задачи в устройстве для контроля внутренней поверхности, содержащем источник подсветки в виде лазера, снабженного оптической системой формирования конического пучка, приемную оптическую систему, включающую объектив и панорамный компонент, устанавливаемый с возможностью проецирования изображения конического сечения полости, и приемника излучения, устанавливаемого в плоскости изображения и подключенного к электронному тракту, в качестве панорамного компонента приемной оптической системы используется панорамный зеркально-линзовый компонент, установленный перед объективом, в состав электронного тракта входит запоминающее устройство, хранящее запись изображения эталона и вычисляющий блок сравнения полученного изображения с эталоном.
Сущность изобретения поясняется чертежами, где на фиг.1 - показано схематичное продольное изображение устройства для контроля негабаритности тоннелей метро;
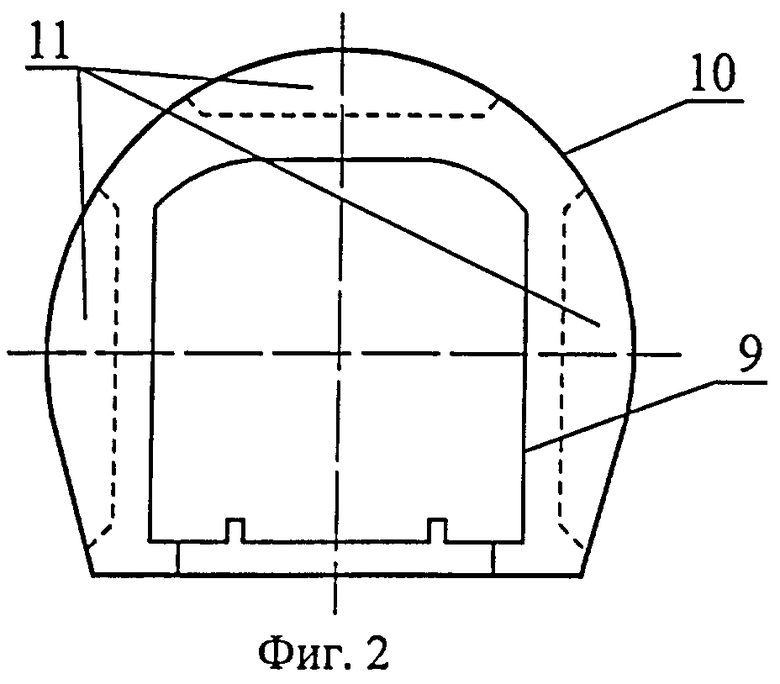
на фиг.2 - поперечное сечение туннеля с размещенным в нем оборудованием и очертанием контролируемого габарита;
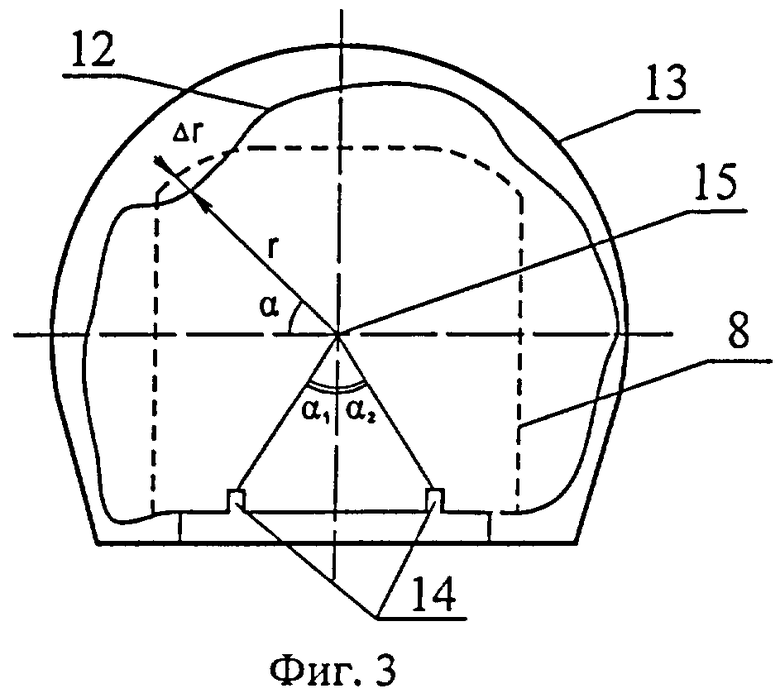
на фиг.3 - поперечное сечение туннеля и контур сканирования.
Устройство для контроля негабаритности размещения оборудования в туннелях (фиг.1) содержит источник подсветки 1, сканирующее плоское зеркало 2, приемную оптическую систему в виде зеркально-линзового компонента 3 и объектива 4, выполненную с возможностью построения изображения поверхности туннеля 5 на приемнике излучения 6 с дальнейшей обработкой в электронном блоке 7, содержащем запоминающее устройство, хранящее изображение эталона 8. Источник подсветки 1 (например, лазер), создает излучение в виде узкого параллельного пучка, ось которого совпадает с продольной осью туннеля. Плоское зеркало 2 установлено на оси вращения, расположенной по направлению оси пучка излучения источника. Плоскость зеркала наклонена к оси пучка на угол меньше 45°, что обеспечивает развертку луча в световой конус с углом 0<σ<90°. В приемную оптическую систему включены зеркально-линзовый панорамный компонент 3 и объектив 4, оптические оси которых совпадают с продольной осью туннеля и первоначальным направлением лазерного пучка.
Устройство работает следующим образом. Контролируется вхождение оборудования в габарит приближения, очертания которого обозначены под номером 9 на фиг.2. При вращении зеркала 2 лазерный пучок описывает конус с углом при вершине σ. Пересекаясь с поверхностью туннеля 10 (фиг.2) и элементами оборудования в зонах его размещения 11, расположенных по периферии туннеля, луч образует замкнутую линию - контур сканирования 12 (фиг.3), отличающуюся от «идеальной» поверхности туннеля 13. Линия очертания габарита задается некоторым эталоном 7, изображение которого хранится в запоминающем устройстве электронного блока. Панорамный зеркально-линзовый компонент 3 создает изображение контура сканирования внутри самого компонента. Это изображение переносится объективом 4 с заданным увеличением на приемник излучения 6. Приемник излучения может быть выполнен в виде передающей телевизионной трубки или ПЗС. Видеосигнал поступает в электронный блок, в состав которого входит и запоминающее устройство, хранящее изображение эталона 8 (фиг.1, 3). Изображения контура сканирования и эталона поступают на монитор. Пересечение контуром сканирования линии эталона фиксируется и визуально, и автоматически в электронном блоке. Далее измеряются отклонения от эталона, соответствующие углам δ, вязанным с углами β, по которым в соответствии со следующим соотношением:
 ,
,
вычисляются величины Δr отклонений приближения оборудования от габарита. Точные координаты привязки величин Δr осуществляют путем измерения углов α, α1 и α2. Угол α соответствует направлению на вхождение оборудования в габарит, α1 и α2 - углы между вертикалью и направлениями на головки рельсов 14, относительно оси пути 15. Головки рельсов входят в угловое поле приемной оптической системы и легко идентифицируются в контуре сканирования. Рельсы, таким образом, служат естественной базой при осуществлении координатных измерений. Необходимость измерения текущих координат связана с тем, что ось платформы, на которой устанавливается устройство для контроля негабаритности размещения оборудования туннелей, может смещаться при движении на несколько сантиметров параллельно уровню верха головок рельсов. Измеряя углы α1 и α2, можно ввести текущую поправку на положение продольной оси.
Таким образом, по сравнению с ближайшим аналогом
- за счет использования базовых точек осуществляется координатная привязка контролируемого отклонения;
- за счет использования панорамного компонента в составе приемной оптической системы повышается достоверность измерения, поскольку в отличие от сферического зеркала, используемого в ближайшем аналоге, панорамный компонент обладает существенно большим угловым полем, обеспечивающим и визуальное наблюдение значительной зоны в окрестности контура сканирования и поэтому простую визуальную идентификацию негабаритности оборудования;
- за счет возможности концентрировать пучок в заданном направлении улучшаются энергетические соотношения в системе, что позволяет контролировать туннели значительных диаметров и повысить точность контроля.
Источники информации
1. ГОСТ 23961-80.
2. Патент РФ №2185645 С2.
3. Патент РФ №2152065 С1 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ВНУТРЕННЕЙ ПОВЕРХНОСТИ ДЫМОВОЙ ТРУБЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2152065C1 |
| СПОСОБ КОНТРОЛЯ ВНУТРЕННЕЙ ПОВЕРХНОСТИ ДЫМОВОЙ ТРУБЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2545062C1 |
| СПОСОБ РЕГИСТРАЦИИ СЕЧЕНИЯ ПРОФИЛЯ ТОННЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2570835C2 |
| Углоизмерительный прибор | 2019 |
|
RU2713991C1 |
| ПАНОРАМНЫЙ ПРИЦЕЛ СО ВСТРОЕННЫМ ЛАЗЕРНЫМ ДАЛЬНОМЕРОМ | 2018 |
|
RU2706519C1 |
| ПИРОМЕТР | 2020 |
|
RU2751091C1 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР (ВАРИАНТЫ) | 2007 |
|
RU2340871C1 |
| Способ построения местной вертикали и устройство для его осуществления | 2017 |
|
RU2664914C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЛАЗЕРНОГО ПРИБОРА НАВЕДЕНИЯ | 2016 |
|
RU2649221C1 |
| Способ лидарного зондирования и устройство для его осуществления | 2013 |
|
RU2692121C2 |
Изобретение относится к оптико-электронным приборам и может быть использовано для измерения негабаритности размещения оборудования. Согласно способу включает подсветку поверхности туннеля узким световым пучком, визирование очертаний подсвеченного участка туннеля, сопоставление контура сканирования с эталоном и измерение отклонений контура сканирования от эталона. Устройство имеет источник подсветки, оптическую систему и телевизионный приемник излучения. В качестве источника подсветки используют лазер, снабженный сканирующей системой с зеркальным отражателем. Оптическая система выполнена с возможностью проецирования контура сканирования на телевизионный приемник излучения. Технический результат - обеспечение координатных измерений, повышение достоверности контроля. 2 н.п. ф-лы, 3 ил.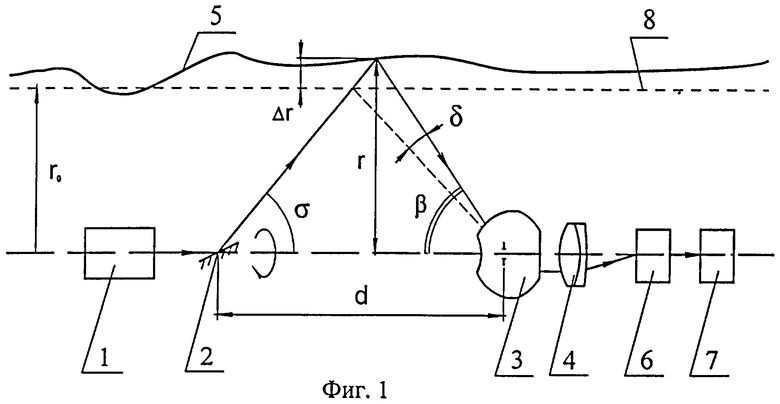
1. Способ контроля негабаритности размещения оборудования в туннелях, включающий создание на поверхности туннеля освещенного контура в исследуемом сечении пучком лазерного излучения, формирование подсвеченного участка поверхности на приемнике излучения, определение состояния поверхности по степени и форме искажения полученного изображения, отличающийся тем, что полученное изображение сравнивают с эталоном, пространственные координаты которого приведены к опорным точкам полости, при этом измеряют: расстояние между точкой пересечения поверхности сканирующего зеркала системы формирования конического пучка и центром входного зрачка приемной оптической системы - d, угол при вершине светового конуса - σ, угол визирования, определяемый как угол между осью полости туннеля и направлением визирования - β, расстояние от оси полости до точки эталона в направлении визирования - r0, а суждение о состоянии поверхности и измерение отклонения от габарита приближения оборудования осуществляют в соответствии со следующим соотношением:
2. Устройство для контроля негабаритности размещения оборудования в туннелях метро, содержащее источник подсветки в виде лазера, снабженного оптической системой формирования конического пучка, приемную оптическую систему, включающую объектив и панорамный компонент, установленные с возможностью проецирования изображения конического сечения полости, и приемник излучения, установленный в плоскости изображения и подключенный к электронному тракту, отличающееся тем, что в нем дополнительно введен панорамный компонент приемной оптической системы, выполненный в виде зеркально-линзового компонента, установленного перед объективом, а в состав электронного тракта введены запоминающее устройство, хранящее изображение эталона, и вычислительный блок сравнения полученного изображения с эталоном.
| УСТРОЙСТВО И СПОСОБ МОНИТОРИНГА ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТУННЕЛЕЙ | 2006 |
|
RU2330238C2 |
| СПОСОБ ПРОХОДКИ ТОННЕЛЕЙ | 2005 |
|
RU2301339C1 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ПЕЧАТНЫХ И РУКОПЕЧАТНЫХ ИЗОБРАЖЕНИЙ СИМВОЛОВ | 2005 |
|
RU2285952C1 |
| СПОСОБ КОНТРОЛЯ ВНУТРЕННЕЙ ПОВЕРХНОСТИ ДЫМОВОЙ ТРУБЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2152065C1 |

