Изобретение относится к системам управления пылесосом и может быть использовано в бытовой технике.
Известно изобретение (см. а.с. СССР 1313424, кл. А 47 L, 9/28, 1986 г.), содержащее электродвигатель пылесоса, формирователь импульсов, выпрямитель, связанный с якорем двигателя.
Известна также система управления пылесосом (см. а.с. СССР и 1771684, кл. А 47 L 9/28, 1991 г., содержащая электродвигатель с вентилятором, выпрямитель питающей сети, кнопку запуска, автоматическую систему управления, включающую систему запуска, элементы сравнения, усилители.
Недостатком известных систем управления пылесосом является отсутствие возможности обеспечения самоходности пылесоса по заданной площади и неавтономность его работы.
Наиболее близкой к данному изобретению является система управления пылесосом, содержащая электродвигатель с вентилятором, выпрямитель питающей сети, автоматическую систему управлении, включаюшую кнопку "пуск" панели ввода дынных системы запуска, элемент сравнения, усилители, датчики, индикатор, кнопку включения и процессор (см. заявку ЕВП N 0681808, кл. А 47 L 9/28, 1995).
Недостатком известного устройства является отсутствие возможности обеспечения самоходности пылесоса по заданной площадь и неавтономность его работы.
Технический результатом данного изобретения является обеспечение самоходности пылесоса по заданной прямоугольный площади и обеспечение автономности его работы (самостоятельного запуска, работы и отключения). Данный технический результат достигается за счет того, что в системе управления пылесосом, содержащей электродвигатель с вентилятором, выпрямитель питающей сети, автоматическую систему управления, включающую кнопку "пуск" панели ввода данных системы запуска, элемент сравнения, усилители, датчики, индикатор, кнопку включения и процессор, согласно изобретению автоматическая система управления снабжена системами отключения и "аварийного" отключения, шаговыми микродвигателями и полупроводниковыми коммутаторами, при этом валы шаговых микродвигателей сообщены через систему передач с задними ведущими колесами пылесоса, которые, в свою очередь, сообщены с оптическими датчиками обратной связи по пути, выходы процессора через усилители и полупроводниковые коммутаторы соединены с шаговыми микродвигателями, датчиками обратной связи и через элемент сравнения включены на входы счетчика угла поворота, выход и один из входов которого соединены с входом и выходом процессора, причем ведущие колеса снабжены электромагнитами, управляемыми процессором и расположенными с внешней стороны колес под острым углом к самому колесу, а система "аварийного" отключения имеет эластичный полый бампер с находящейся одной поверхностью внутри, а другой вне бампера кнопкой включения схемы "аварийного" отключения, при замыкании которой один из выходов процессора подключен к звонку "аварийного" отключения и через батарею, питающую индикатор "аварийного" отключения, к самому индикатору и через него к разблокиратору кнопки "пуск" панели ввода данных системы запуска, а также за счет того, что система отключения имеет звонок отключения, через который один из выходов процессора соединен с разблокиратором кнопки "пуск" панели ввода данных системы запуска.
Таким образом, в системе управления пылесосом, содержащей электродвигатель с вентилятором, выпрямитель питающей сети, автоматическую систему управления, включающую систему запуска, элементы сравнения и усилители, автоматическая система " управления снабжена шаговыми микродвигателями (ШМД) (по одному на каждое из ведущих задних колес), имеющими усилители и полупроводниковые коммутаторы, при этом валы шаговых микродвигателей через систему передач сообщены с задними ведущими колесами корпуса пылесоса и круговыми оптическими датчиками обратной связи, процессором, выходы которого сообщены с ШМД посредством усилителей и полупроводниковых коммутаторов, а через ШМД датчики обратной связи и элемент сравнения включены на вход счетчика угла поворота, выход которого соединен с одним из входов процессора, а другой вход сообщен с одним из выходов процессора. Задние ведущие колеса корпуса пылесоса снабжены электромагнитами, управляемыми процессором и выполняющими роль тормозных колодок, используемых при повороте пылесоса и расположенных по отношению к колесу под определенным острым углом, способствующим облегчению, упрощению поворота.
Кроме того, данная автоматическая система управления пылесосом, в отличие от уже известных, включает в себя системы "аварийного" и "обычного" отключения прибора.
Систему "аварийного" отключения образуют: эластичный полый внутри бампер, находящаяся одной поверхностью внутри, а другой вне бампера кнопка включения схемы "аварийного" отключения, замыкая эту схему кнопка подключает один из выходов процессора к звонку "аварийного" отключения и (через батарею, питающую индикатор "аварийного" отключения, к самому индикатору и через него к - разблокиратору кнопки "пуск" панели ввода данных системы запуска.
Систему "обычного" отключения образуют: процессор, одним из выходов соединенный через звонок "обычного" отключения с разблокиратором кнопки "пуск" панели ввода данных системы запуска.
Новизна заявляемого предложения обусловлена тем, что за счет системы управления, имеющей шаговые микродвигатели, датчики обратной связи, а также систему запуска и систему "аварийного" и "обычного" отключения, управляемые процессором, достигаются самоходность пылесоса и автономность его работы (самостоятельные запуск, работа, отключение), а благодаря разработанной схеме движения, обеспечиваемой данной системой управления, достигается тщательность обрабатывания заданной территории.
По данным патентной и научно-технической литературы не обнаружена заявляемая совокупность признаков, что позволяет судить об изобретательском уровне предложения.
Сущность изобретения поясняется чертежом, где представлено на фиг. 1 - блок-схема системы управления, на фиг. 2 - схема расположения узлов и деталей системы управления пылесосом, фиг. 3 - схема движения пылесоса.
Система управления пылесосом содержит шаговые микродвигатели 1 (ШМД) но одному нa каждое левое и правое заднее ведущее колесо 2 корпуса пылесоса. ШМД 1 имеют усилители 3 и полупроводниковые коммутаторы 4. Валы ШМД 1 через систему передач соединены с колесами 2 пылесоса, которые в свою очередь соединены с круговыми оптическими датчиками обратной связи 5.
Также система управления имеет процессор 6, который рассчитывает определяющие программу формирования и подачи импульсов на ШМД и управляющие работой всего пылесоса в целом параметры A и B, зависящие от задаваемых через ввода данных системы запуска 10 чисел X и Y, где X - длина обрабатываемой поверхности, Y - ширина, выраженные, например, в сантиметрах. Процессор 6 также совмещает функции: 1) интерполятора, преобразующего программу, рассчитываемую или берущуюся из памяти ЭВМ в зависимости от полученного параметра В, в систему команд для полупроводниковых коммутаторов (ПК) шаговых микродвигателей; 2) тактового генератора, формирующего тактовые импульсы для ПК и 3) буферного запоминающего устройства, используемого для хранения необходимой информации и обратной связи.
Процессор 6 через свои выходы соединен посредством усилителей 3 и полупроводниковых коммутаторов 4 с ШМД 1, и далее через круговые оптические датчики обратной связи 5 и через элемент сравнения 8 (логический элемент "И") включен на вход счетчика угла поворота 9, выход которого и вход соединены с входом и выходом процессора 6. Процессор 6 также соединен с системами "аварийного" и "обычного" отключения пылесоса.
Система "аварийного" отключения включает в себя плотный, но эластичный бампер 7, покрывающий по боковой поверхности пылесос. Своим строением бампер 7 напоминает автомобильную камеру. Он также полый внутри и наполнен сильно сжатым воздухом, но в отличие от камеры не выпуклый, а как можно более плоский. Внутри бампера 7 находится внутренняя поверхность кнопки включения схемы "аварийного" отключения 14. При оказывании на внутреннюю поверхность кнопки 14 давления со стороны сжатого воздуха, кнопка 14 своей внешней стороной замыкает схему "аварийного" отключения и тем самым подключает процессор 6 к звонку "аварийного" отключения 15 и далее через батарею 16, питающую индикатор "аварийного" отключения 17, к самому индикатору 17 и разблокиратору кнопки "пуск" 19 панели ввода данных системы запуска 10, отключающему электродвигатель 13 и пылесос в целом от сети питания.
В системе "обычного" отключения процессор 6 одним из выходов соединен через звонок "обычного" отключения 18 с разблокиратором кнопки "пуск" 19 панели ввода данных системы запуска 10.
Задние колеса 2 снабжены электромагнитами 11, управлямыми процессором 6 и выполняющими роль тормозных колодок, расположенными с внешней стороны ведущего колеса 2 под определенным к нему острым углом, способствующим развороту колеса. В пылесосе рабочий орган выполнен в виде двух цилиндрических щеток 12, сообщенных через ременную передачу с электродвигателем 13, установленных с возможностью встречного вращения, и расположенных в днище корпуса между задними ведущими колесами 2.
Система управления пылесосом работает следующим образом.
Пылесос устанавливается щетками 12 в левый верхний угол заданного прямоугольника движения, т. е. на площадь, которую необходимо пропылесосить. Затем пылесос подключается к электросети, после чего задаются через панель ввода данных системы запуска 10 числа Y и X, где Y - ширина обрабатываемой площади, X - длина, выраженные, например, в сантиметрах. Затем нажимается кнопка "пуск". В процессоре 6 рассчитываются параметры B и A:
A = X - b1 + (X-2b1) • (B-1);
где b1 - расстояние между центрами ведущих задних колес;
C - длина пылесоса (вместе с бампером 7)
Y - ширина обрабатываемой площади;
X - длина обрабатываемой площади.
Значение A хранится в памяти процессора 6, по нему определяется конец работы пылесоса.
Значение B определяет количество поворотов пылесоса и программу формирования и подачи импульсов для каждого ШМД.
В зависимости от полученного значения параметра B рассчитываются или выбираются из памяти процессора 6 уже готовые, заложенные ранее программы формирования и подачи импульсов для полупроводниковых коммутаторов 4 ШМД 1 для каждого колеса 2 отдельно. Согласно этим программах в процессоре 6 формируются импульсы, которые усиливаются усилителями 3 и поступают на полупроводниковые коммутаторы 4 ШМД 1. ШМД 1 начинают работать в зависимости от поступаемого сигнала и через систему передач вращают ведущие колеса 2.
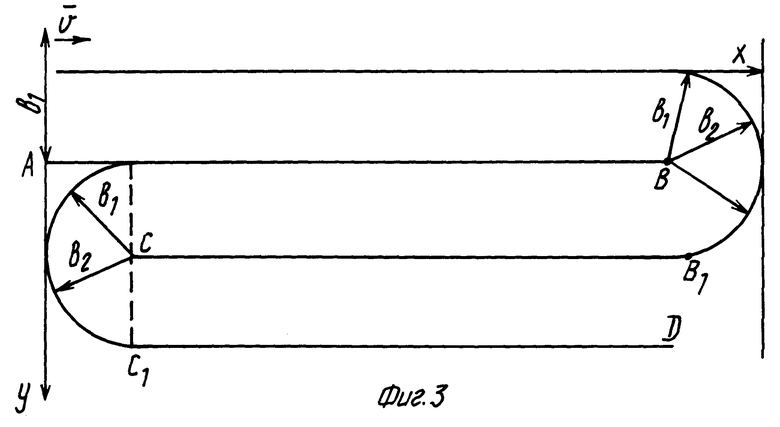
При движении из т.A по т.B (см. фиг.3) одинаковый сигнал подается на оба ШМД 1, следовательно, оба ведущих колеса 2 движутся одинаково (поступательно и равномерно) и проходят одно расстояние, равное X-b1, где b1 - расстояние между центрами ведущих колес 2.
В т.B прекращает вращаться согласно программе ротор правого ШМД 1. В это же время процессор 6 подключает согласно программе электромагнит 11 правого заднего колеса 2, который в свою очередь разворачивает на определенный острый угол колесо 2 и фиксирует его. Поступательное движение правого заднего ведущего колеса 2 прекращается.
В это же время продолжает вращаться левое ведущее колесо 2, которое проходит путь S = πR, где R = b1 расстоянию между центрами ведущих колес 2.
Таким образом, совершается поворот пылесоса на 180o на правом заднем ведущей колесе.
После этого поворота, когда центр левого заднего колеса попадает в т.B1, вновь начинают работу оба ШМД 1. Пылесос движется поступательно и равномерно до т.C. При этом он проходит путь, равный X - 2b1.
В т. C. прекращает вращаться ротор левого ШМД 1, фиксируется и разворачивается электромагнитом 11 левое заднее колесо, а правое заднее продолжает движение и проходит путь S = πR где R = b1 Таким образом, совершается поворот пылесоса на 180o на левом заднем колесе.
После этого поворота, когда центр правого заднего колеса попадает в т. C1, вновь начинают работу оба ШМД. Пылесос движется равномерно и поступательно до т.D, в которой совершается поворот на правом заднем колесе. И т.д. .
Контроль пройденного пылесосом расстояния осуществляется процессором 6, который сравнивает хранящееся в его памяти и полученное им при расчете значение параметра A со значением A1, поступающим в процессор 6 со счетчика угла поворота 9.
Для правильного подсчета обработанного расстояния важно, чтобы поступление сигнала на счетчик угла поворота 9 было лишь в то время, когда работают оба ШМД. Для этого в цепи, связывающей процессор 6 и счетчик угла поворота 9, устанавливается элемент сравнения 8 (логический элемент "И").
Когда A= A1, процессор 6 включает систему "обычного" отключения: отключает ШМД, подает импульс на срабатывание звонка "обычного" отключения 18, извещающего потребителя о благополучном окончании работы пылесоса, после чего отключает электродвигатель 13 и пылесос в целом от сети питания с помощью разблокиратора кнопки "пуск" 19.
В случае, если неправильно были измерены длина иди ширина обрабатываемой площади и вследствие этого пылесос "уперся" в процессе работы в какой-либо предмет и не может продолжить свое движение, срабатывает система "аварийного" отключения.
Давление, оказываемое посторонним предметом на эластичный бампер 7 пылесоса, по сжатому воздуху, находящемуся внутри бампера, передается по закону Паскаля на кнопку включения схемы "аварийного" отключения 14. Кнопка 14 срабатывает и замыкает эту схему. Процессор 6 подает сигнал на звонок "аварийного" отключения 15, извещающий потребителя о произошедшем в работе нарушении. Далее подключает батарею 16, питающую индикатор "аварийного" отключения 17, сам индикатор 17, после чего срабатывает разблокиратор кнопки "пуск" 19, и вследствие этого отключается от сети питания двигатель 13 и сам пылесос.
Изобретение позволяет обеспечить самоходность пылесоса по заданной прямоугольной площади и автономность его работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОХОДНАЯ МАШИНА С ЭЛЕКТРИЧЕСКОЙ СИСТЕМОЙ ПРИВОДА | 2019 |
|
RU2715820C1 |
| Автоматический программируемый пиротехнический пульт | 2022 |
|
RU2798313C1 |
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ КОМАНДНО-СТРЕЛЬБОВОЙ ИНФОРМАЦИОННО-УПРАВЛЯЮЩЕЙ СТИСТЕМЫ | 2001 |
|
RU2206167C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2014 |
|
RU2550408C1 |
| БУРОВАЯ УСТАНОВКА, СИСТЕМА И СПОСОБ ЕЕ ПЕРЕМЕЩЕНИЯ | 2019 |
|
RU2791500C2 |
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ КОРАБЕЛЬНОГО ИНФОРМАЦИОННО-УПРАВЛЯЮЩЕГО КОМПЛЕКСА | 2004 |
|
RU2267849C1 |
| БЛОК КОНТРОЛЯ И УПРАВЛЕНИЯ | 2004 |
|
RU2275669C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ И ВИЗУАЛИЗАЦИИ ПОКАЗАНИЯ ДАВЛЕНИЯ В ПНЕВМАТИЧЕСКОЙ ШИНЕ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2171183C1 |
| КОМАНДНО-СТРЕЛЬБОВАЯ ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА | 2001 |
|
RU2191430C1 |
| БЛОК УПРАВЛЕНИЯ, ЗАЩИТЫ И СИГНАЛИЗАЦИИ МОДУЛЯ КОМПРЕССОРНОГО ЗАПРАВОЧНОГО | 2000 |
|
RU2211471C2 |

Изобретение относится к системам управления пылесосом и может быть использовано в бытовой технике. Сущность изобретения заключается в том, что для обеспечения самоходности пылесоса по заданной прямоугольной площади и автономности его работы система снабжена шаговыми микродвигателями для левого и правого задних ведущих колес, круговыми оптическими датчиками обратной связи, а также системами запуска, "аварийного" и "обычного" отключения. Шаговые микродвигатели имеют усилители и полупроводниковые коммутаторы. Валы микродвигателей через систему передач соединены с ведущими колесами. Система управления также снабжена процессором, который рассчитывает параметры, зависящие от вводимых через панель ввода данных значений ширины и длины обрабатываемой площади, которые определяют программу формирования и подачи импульсов для полупроводниковых коммутаторов. Техническим результатом данного изобретения является обеспечение самоходности пылесоса по заданной прямоугольной площади и обеспечение автономности его работы. 1 з.п.ф-лы, 3 ил.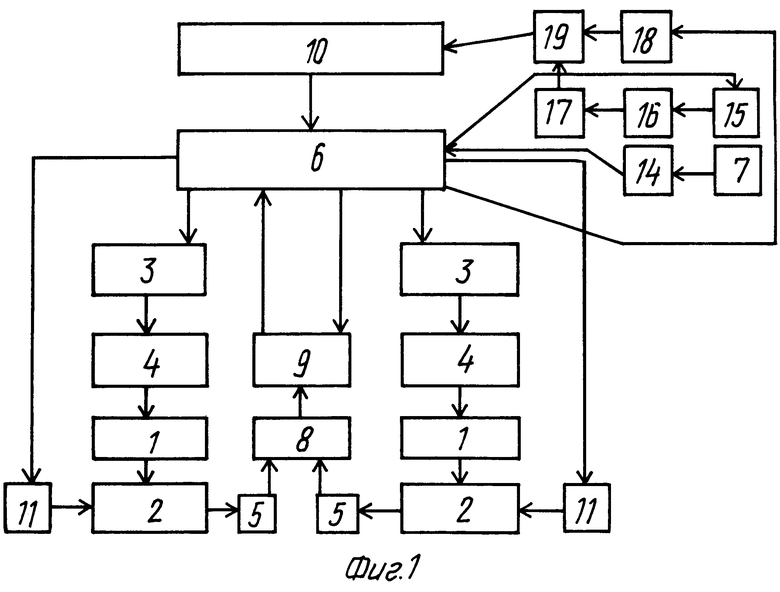
| 2,2-Дизамещенные 1,3,4-триазабицикло (4,1,0)-гептан-5-оны и способ их получения | 1978 |
|
SU681808A1 |
| Система управления пылесосом | 1991 |
|
SU1771684A1 |
| ГИДРОПРИВОД ЗЕМЛЕРОЙНОЙ МАШИНЫ | 0 |
|
SU319700A1 |
| WO 9602179 A1, 01.02.1996 | |||
| US 4306329 A, 22.12.1981 | |||
| US 4977639 A, 18.12.1990. | |||
