ОБЛАСТЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
[001] Настоящее изобретение в целом относится к роботизированным и автоматизированным способам и системам для размещения буровой или другой крупной конструкции. В раскрытых способе и системе используются прикрепленные установочные башмаки, каждый из которых обеспечивает индивидуально адресуемое управление вертикальным положением и поворотом посредством беспроводной связи и обратной связи для бесступенчатой регулировки вертикального положения и управления поворотным положением.
УРОВЕНЬ ТЕХНИКИ
Объект настоящего изобретения относится к перемещению буровой установки на месторождении без сборки и разборки структурных компонентов. В результате обеспечивается надежное, быстрое и простое управление размещением и положением буровой установки. Благодаря предоставленной в настоящем документе информации, буровая компания, планирующая осуществлять бурение для добычи природных ресурсов, может сэкономить тысячи долларов на строительстве и демонтаже буровых установок, поскольку ей требуется наиболее эффективное место на месторождении, где можно будет осуществлять новое бурение для добычи подземных энергоресурсов.
[002] В прошлом в известных способах использовались структурные башмаки, но без возможностей раскрытого объекта изобретения. Известные системы не обеспечивают индивидуально адресуемых башмаков для размещения или работы установочного башмака и, следовательно, не допускают индивидуальных манипуляций с башмаками для различных требований размещения, с которыми может столкнуться оператор буровой установки.
[003] Поскольку в известных системах отсутствует независимое управление установочными башмаками, техобслуживание и ремонт неисправных установочных башмаков оказались сложными и дорогостоящими. В таких конфигурациях гидравлические линии должны быть проложены по всей раме буровой установки, чтобы приводить в действие установочные башмаки с помощью источника гидравлической энергии.
[004] Другим аспектом более ранних установочных башмаков является отсутствие управления с обратной связью, схемы или индикатора, которые информируют оператора о поведении установочного башмака.
[005] Кроме того, известные установочные башмаки буровой установки не могут обеспечить эффективный поворотный механизм, который обеспечивает возможность плавного управления поворотом.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[006] Принимая во внимание вышеупомянутые проблемы в области разведки и добычи энергоресурсов, в настоящем изобретении предложены многочисленные инновации, улучшения и разработки, относящиеся к роботизированным и автоматизированным системам для изменения положения буровой конструкции, осуществляющей добычу нефти или энергоресурсов на месторождении. Раскрытый объект изобретения включает способ и системы размещения буровой или другой крупной конструкции с помощью прикрепленных установочных башмаков с индивидуально адресуемым беспроводным управлением вертикальным положением и поворотом.
[007] Согласно одному аспекту настоящего изобретения в настоящем документе предложена система перемещения буровой установки для перемещения буровой установки или аналогичной конструкции на нефтяном месторождении или в аналогичных условиях. Настоящая система включает в себя множество независимо управляемых установочных башмаков для прикрепления к буровой установке и управления посредством отдельных и скоординированных команд управления положением. Каждый из множества независимо управляемых установочных башмаков может изменять положение буровой установки. Каждый из независимо управляемых установочных башмаков включает в себя корпус, прикрепленный к буровой установке и обеспечивающий структурную оболочку для размещения гидравлического привода и схемы беспроводного управления. Гидравлический привод обеспечивает вертикальное, горизонтальное и вращательное усилие в ответ на сигналы беспроводного управления от схемы беспроводного управления. Схема беспроводного управления передает беспроводные данные о положении, управлении и команды посредством удаленного устройства беспроводной связи и преобразует беспроводные данные о положении, управлении и команды в сигналы управления гидравлическим приводом. Толкатель цилиндра установочного башмака вертикально поднимает гидравлический привод, принимает и передает вертикальное и вращательное усилие от гидравлического привода. Узел опоры установочного башмака жестко соединяется с толкателем цилиндра установочного башмака, принимает и передает горизонтальное усилие от гидравлического привода. Цилиндр поперечного перемещения установочного башмака соединяется с возможностью скольжения с узлом опоры установочного башмака и включает в себя гидравлический поршень и узел направляющей для приема и горизонтального перемещения в ответ на усилие горизонтального перемещения. Цилиндр поперечного перемещения установочного башмака контактирует с грунтом месторождения и перемещает буровую установку при движении. Толкатель цилиндра установочного башмака и цилиндр поперечного перемещения установочного башмака обеспечивают бесступенчатое управление положением независимо управляемого установочного башмака.
[008] Раскрытие настоящего варианта осуществления включает использование установочного башмака или опоры для буровой установки в качестве одного из четырех башмаков, на которых будет поддерживаться буровая установка. Установочный башмак обеспечивает истинное беспроводное управление с беспроводного контроллера для полного диапазона горизонтальных перемещений на 360°, а также вертикального подъема для подъема и опускания буровой установки. Раскрытие настоящего изобретения обеспечивает полностью закрытую систему установочных башмаков, которая является индивидуально адресуемой и которая может работать в координации с другими башмаками, установленными на буровой установке.
[009] Согласно настоящему изобретению в настоящем документе предложен способ транспортировки тяжелого оборудования с помощью беспроводного дистанционного управления. Предложенные в настоящем документе функции включают использование гидравлической энергии, подаваемой на приводы, для подъема, поперечного перемещения и поворота с помощью четырех или более независимых узлов подъема/поперечного перемещения/поворота. Другая функция включает использование беспроводного управления для независимого определения направления каждого узда подъема/поперечного перемещения/поворота. В настоящем изобретении используется источник гидравлической энергии, расположенный на каждом из четырех или более узлов подъема/перемещения/поворота, с подачей электропитания на каждый узел. Другой аспект настоящего изобретения включает использование гидравлической системы управления, которая направляет текучую среду к каждому приводу подъема/поперечного перемещения/поворота на основе функции программирования.
[0010] Дополнительные аспекты настоящего изобретения включают использование электронной обратной связи от каждого из нескольких датчиков, связанных с установочным башмаком и буровой установкой, для поддержания положения привода для каждой функции подъема, поперечного перемещения и поворота. Дополнительный аспект настоящего изобретения включает использование электродвигателя гидравлического привода для приведения в действие устройства поворота для определения направления движения каждого узла подъема/поперечного перемещения/вращения. Используя беспроводное дистанционное управление, настоящая система обеспечивает возможность изменения движения на основе сигналов для каждого узла подъема/поперечного перемещения/поворота независимо или синхронно. Еще один представленный в настоящем документе набор функций включает использование электрического контроллера на каждом узле подъема/поперечного перемещения/поворота для обеспечения запрограммированной логики для каждого движения, включая подъем, поперечное перемещение, поворот для изменения направления по мере необходимости.
[0011] Таким образом, по существу, описанные в настоящем документе способ и система обеспечивают новую конструкцию, которая может быть рассчитана на любую существующую буровую установку или другое оборудование и адаптирована к ней. Этот способ и система обеспечивают самую быструю из известных систем, позволяющую перемещать буровую установку со скоростью до 18 метров в час (60 футов в час). При этом требуется только входная мощность 480 В переменного тока; никаких внешних трубопроводов или гидравлической системы не требуется. Этот способ и система обеспечивают полностью автономную встроенную гидравлическую систему, предназначенную для повышения эффективности и надежности. При этом беспроводная связь между модулями перемещения и устройством дистанционного управления легко координирует все движения, связанные с перемещением, управлением и поворотом буровой платформы. Более того, движения буровой установки можно расширить до 8, 12 или более модулей перемещения, чтобы синхронизировать движение вспомогательного оборудования с буровой.
[0012] Дополнительные аспекты настоящего изобретения включают предоставление улучшенных движений буровой установки с помощью автоматизированного перемещения буровой установки. Поскольку перемещение наземной буровой установки на место может быть трудоемким и опасным процессом как для оборудования, так и для людей. Описанная в настоящем документе система перемещения буровой установки повышает безопасность буровой установки за счет удаления рабочих с буровой площадки и сведения к минимуму количества оборудования, которое необходимо разбирать для перемещения. Это позволяет квалифицированным работникам по добыче больше сосредоточиться на добыче, а не на разборке и повторной сборке буровой установки.
[0013] Другое преимущество описанной в настоящем документе системы включает в себя функции разделения работы и повышения эффективности. Новая система перемещения буровой установки, описанная в настоящем документе, устраняет сложную схему труб и шлангов, связанных с большой центральной гидравлической силовой установкой (HPU - англ.: hydraulic power unit), за счет размещения высокоэффективных компактных HPU непосредственно на месте работы. Каждая HPU имеет специальный встроенный контроллер, который беспроводным способом обменивается данными с центральным человеко-машинным интерфейсом (HMI - англ: human machine interface) и устройством дистанционного управления, что позволяет каждой HPU автоматически обеспечивать правильные выходные сигналы для безопасного перемещения буровой установки. При подключении этих HPU к трехфазному источнику питания они могут автоматизировать и контролировать процесс перемещения с помощью беспроводного устройства дистанционного управления.
[0014] Еще одно преимущество настоящего способа и системы включает повышенную эффективность при точном размещении. Компоновка HPU описанной в настоящем документе системы обеспечивает улучшенное управление опорами буровой установки по сравнению с традиционными системами перемещения буровой установки, обеспечивая диапазон движения на 360° с погрешностью менее 1° во время движений буровой установки. Это позволяет буровой установке поворачиваться вокруг конкретной цели или двигаться по дуге, чтобы приблизиться к следующей буровой площадке с оптимального направления.
[0015] Еще одним аспектом описанных в настоящем документе способа и системы является преимущество более быстрых движений буровой установки за счет синхронизированного расширения. Настоящий способ и система обеспечивают децентрализованное управление HPU, которое позволяет расширить типичные четыре модуля перемещения до массива из восьми или более полностью синхронизированных модулей. Эта революционная конструкция позволяет вспомогательному оборудованию, например вибрационным ситам для бурового раствора, двигаться синхронно с самой буровой установкой, что обеспечивает более быстрое перемещение и более высокую производительность.
[0016] Еще одно техническое преимущество описанного в настоящем документе объекта изобретения включает в себя модульный и сменный установочный башмак, что исключает необходимость в централизованной или специальной HPU, а также все для «подскакивания с земли» одного установочного башмака, когда он отсоединен от буровой установки для тестирования, обслуживания и контроля качества.
[0017] Эти и многочисленные другие технические и эксплуатационные преимущества будут очевидны после ознакомления с описанным в настоящем документе объектом изобретения, который полностью поддерживает формулу изобретения, приведенную в настоящем документе.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[0018] Новые признаки, которые считаются характерными для описанного объекта изобретения, будут изложены в любых приведенных ниже пунктах формулы изобретения. Однако сам описанный объект изобретения, а также предпочтительный способ применения, его дополнительные цели и преимущества будут лучше всего понятны при обращении к нижеследующему подробному описанию иллюстративного варианта осуществления вместе с прилагаемыми графическими материалами.
[0019] Описав таким образом изобретение в общих чертах, теперь будет сделана ссылка на прилагаемые графические материалы, которые не обязательно выполнены в масштабе и в которых:
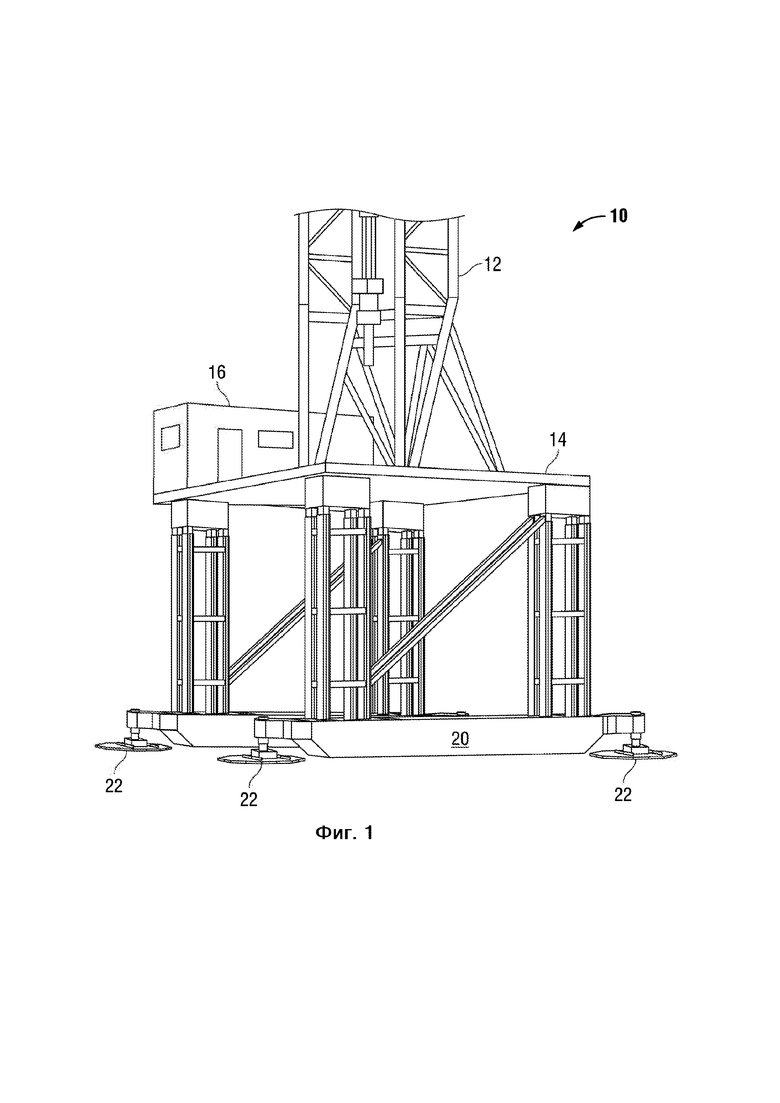
[0020] на фиг. 1 представлена буровая установка, которая может использоваться для добычи энергоресурсов на нефтяном месторождении или аналогичном месте с использованием описанного в настоящем документе объекта изобретения;
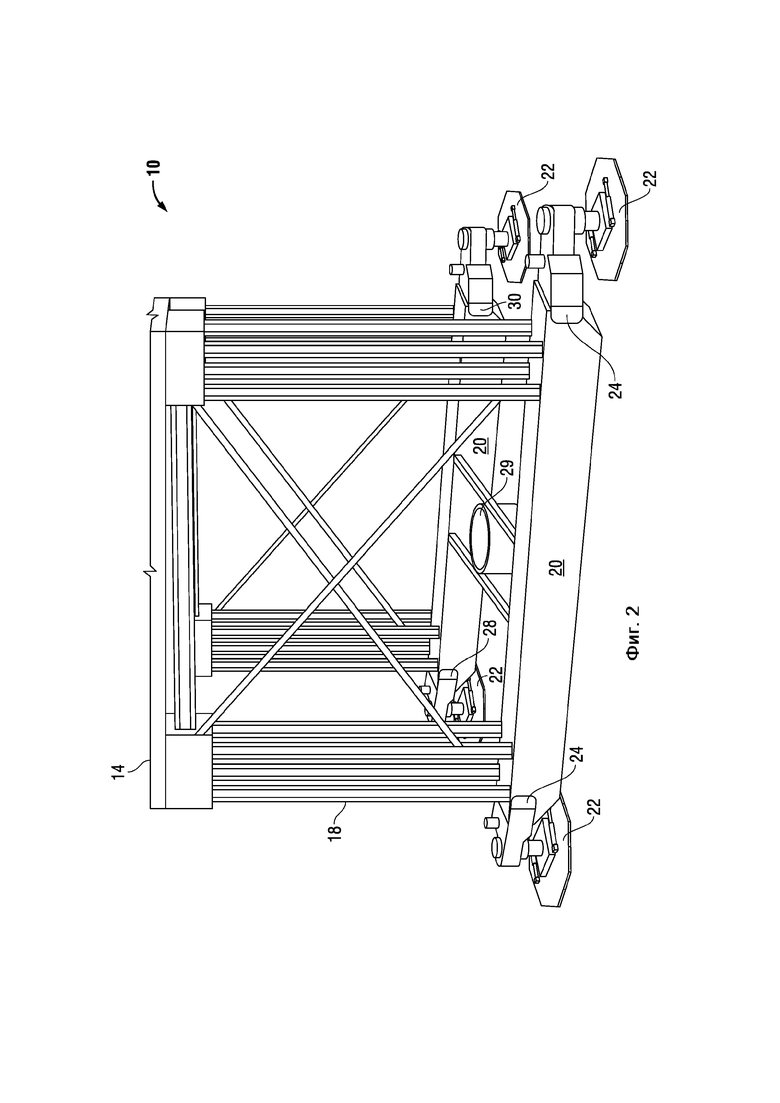
[0021] на фиг. 2 более подробно показано крепление описанных в настоящем документе установочных башмаков к основанию буровой установки;
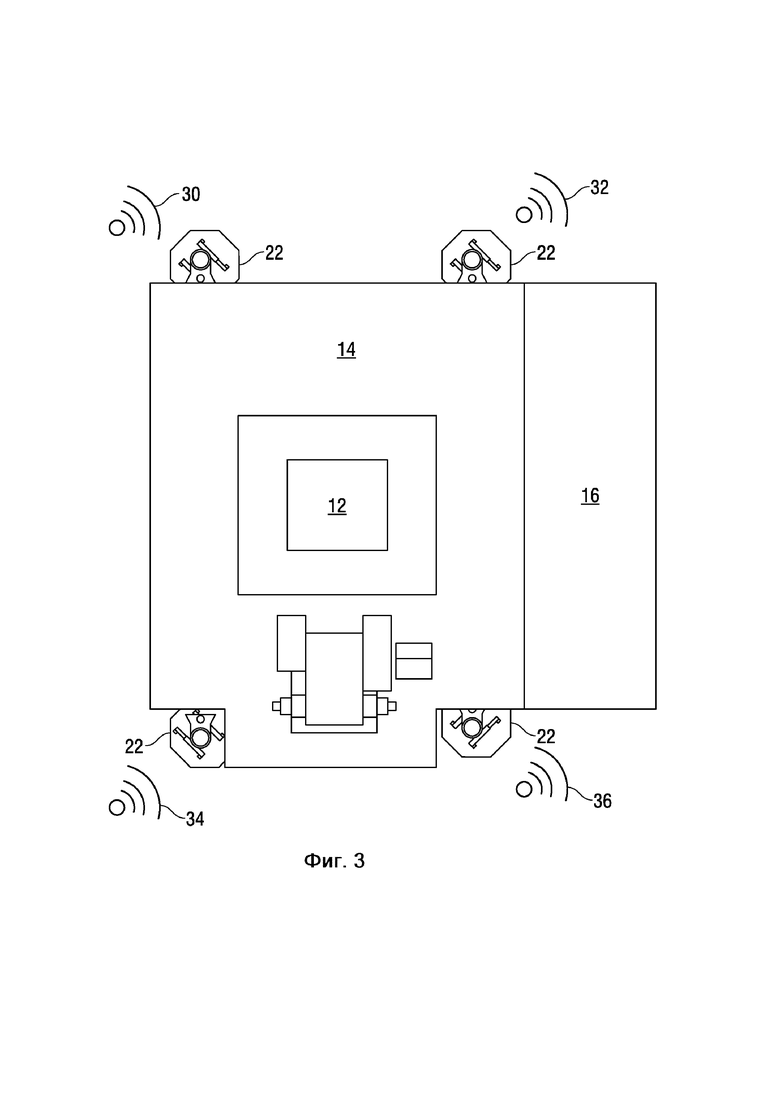
[0022] на фиг. 3 представлен вид сверху вниз буровой установки, чтобы проиллюстрировать ориентацию и расположение установочных башмаков в четырех углах буровой установки;
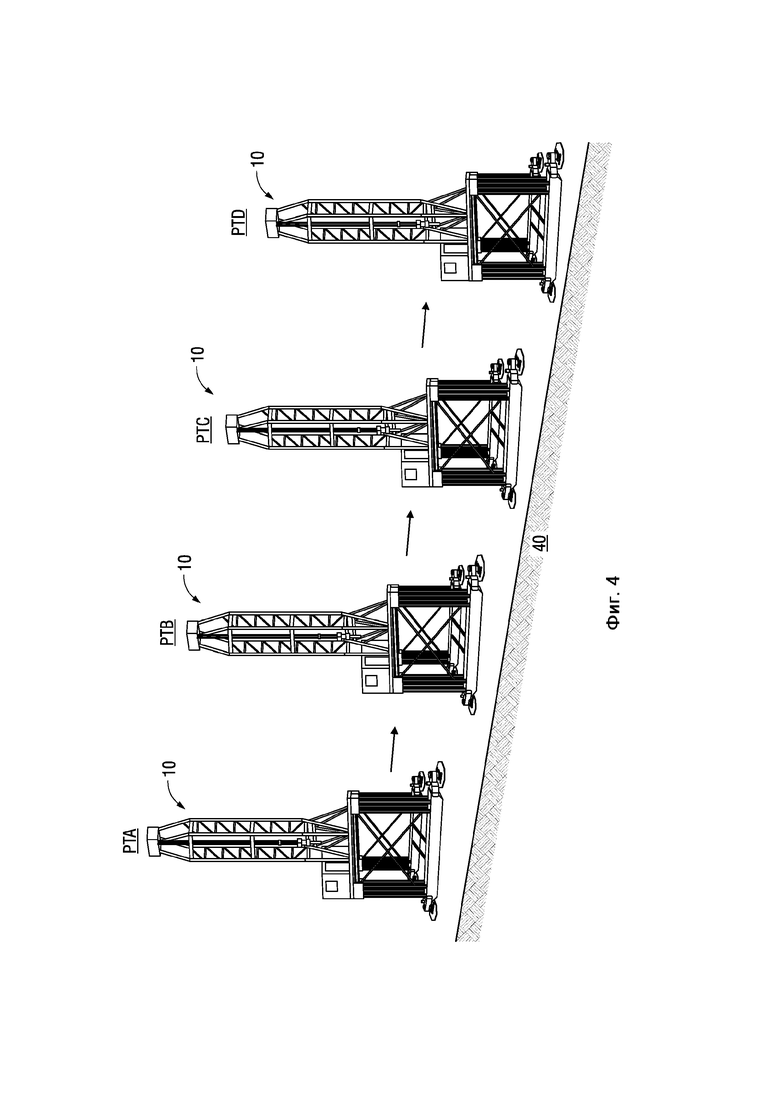
[0023] на Фиг. 4 представлен важный аспект описанной в настоящем документе системы для перемещения буровой установки;
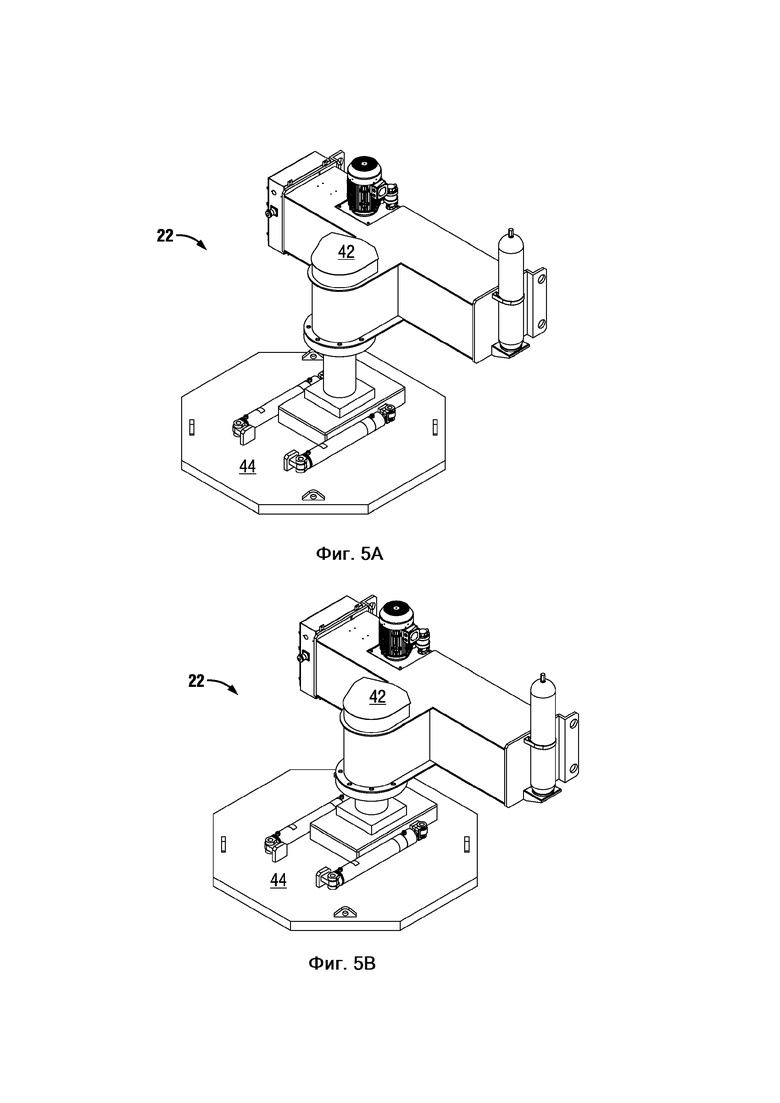
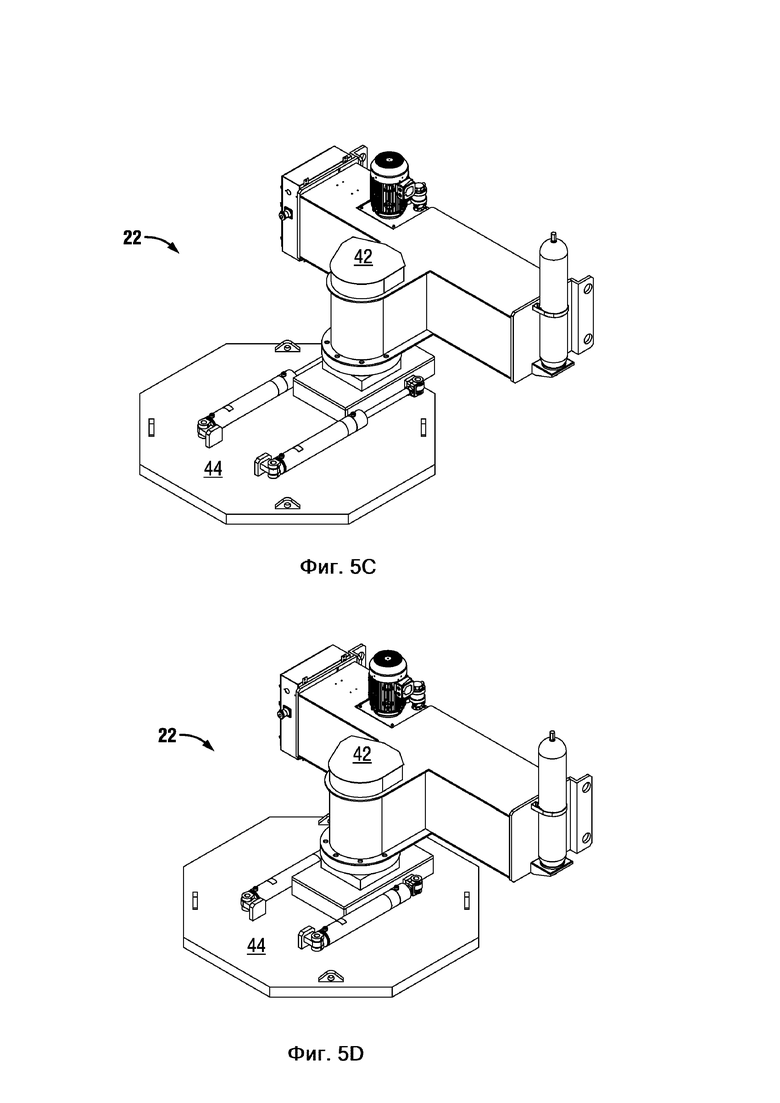
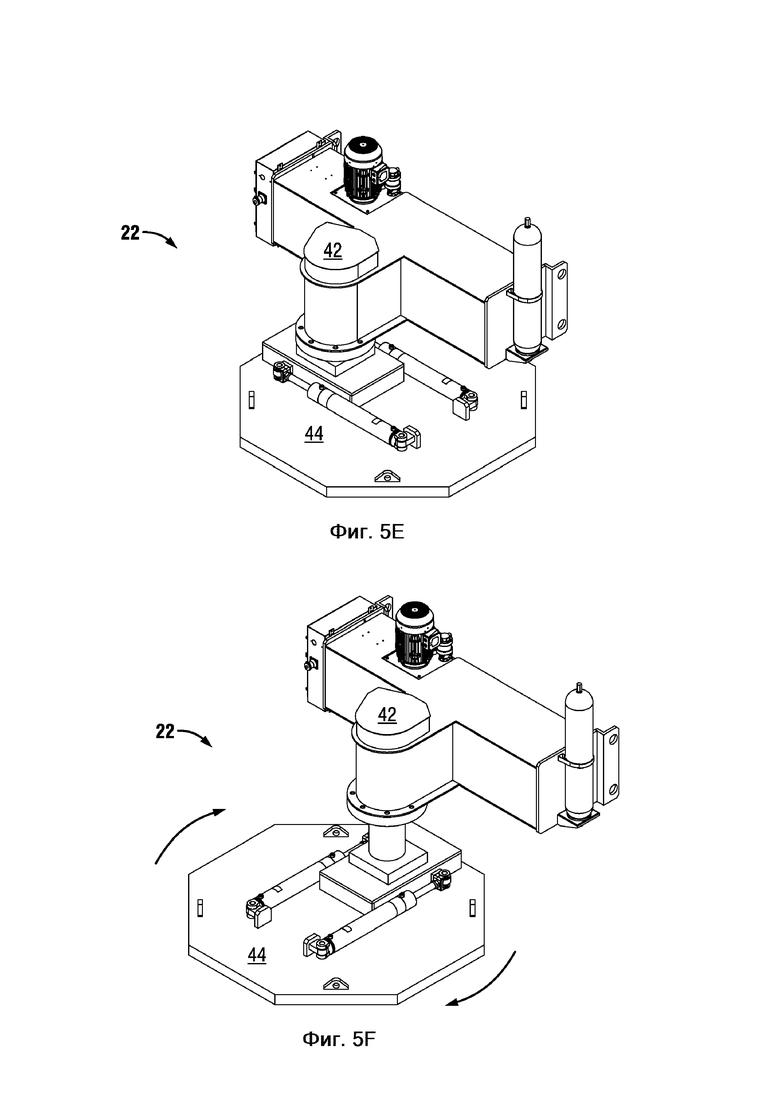
[0024] на фиг. 5А, 5В, 5С, 5D, 5Е и 5F представлено расположение, управление и операции, доступные при использовании настоящего независимо управляемого установочного башмака;
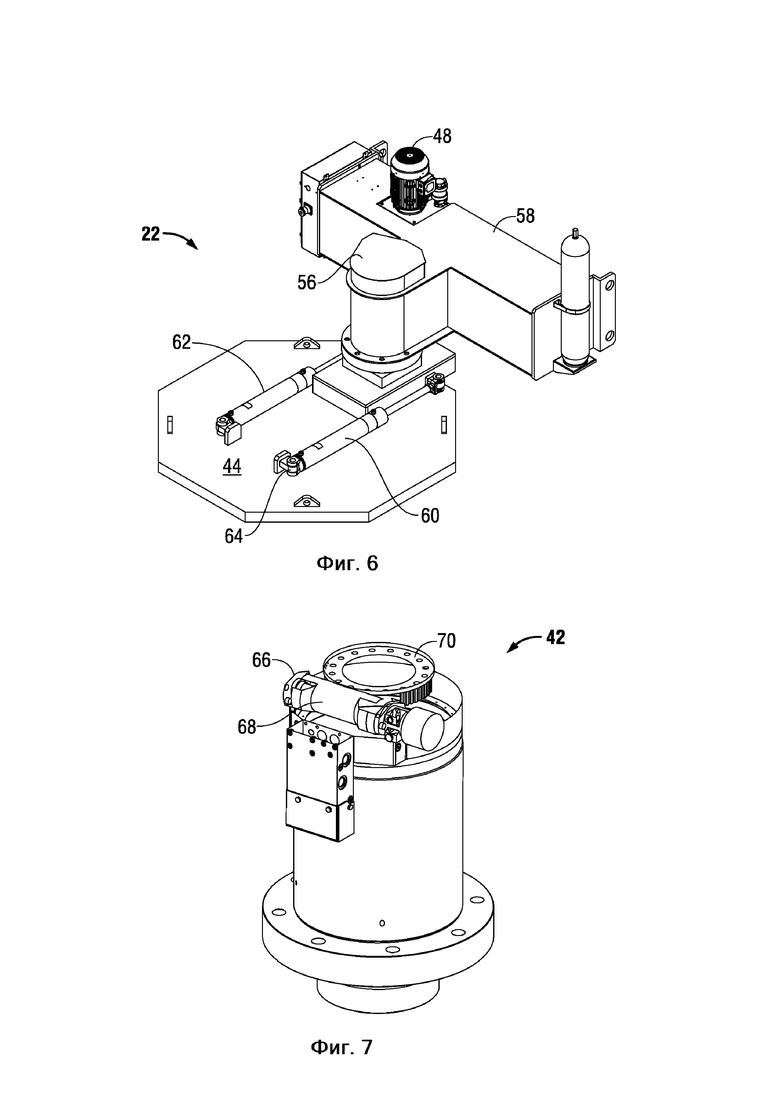
[0025] на фиг. 6 представлен блок управления гидравликой установочного башмака для управления толкателем цилиндра, как описано в настоящем документе;
[0026] на фиг. 7 представлен толкатель цилиндра в соответствии с идеями настоящего изобретения;
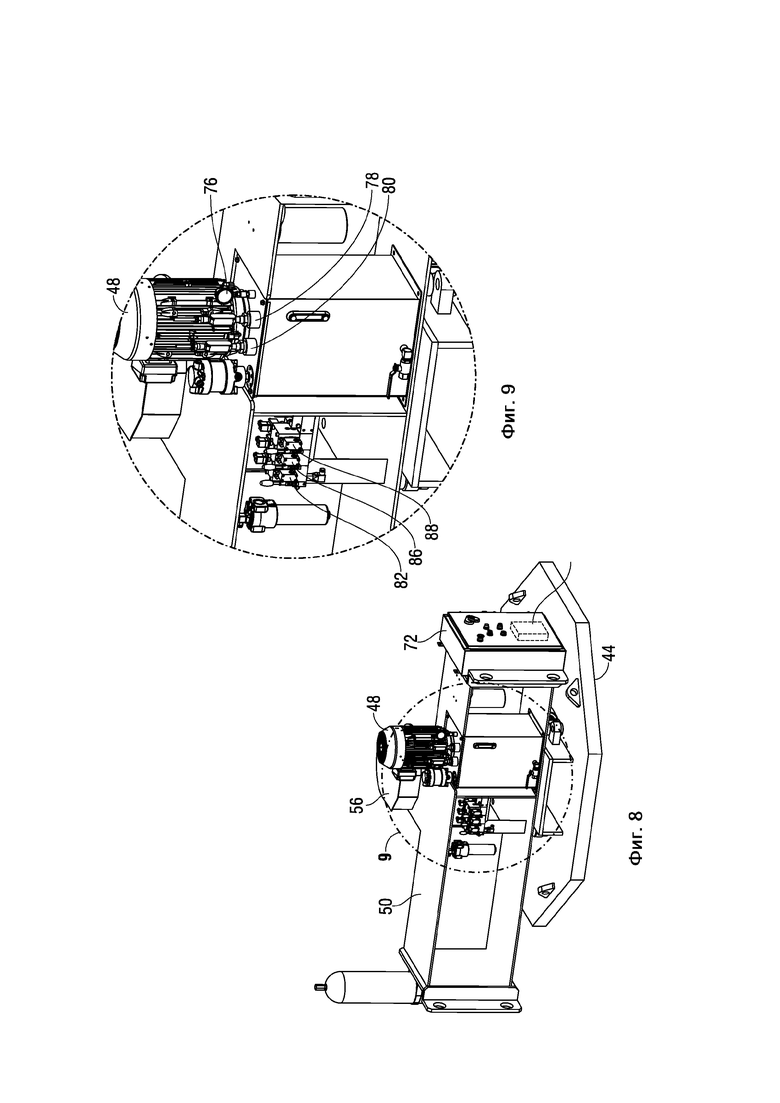
[0027] на фиг. 8 и 9 представлены виды сзади в перспективе гидравлического блока установочного башмака;
[0028] на фиг. 10 представлено беспроводное устройство дистанционного управления для управления работой описанного в настоящем документе установочного башмака;
[0029] на фиг. 11 представлен блок управления работой установочного башмака согласно описанным в настоящем документе способу и системе;
[0030] на фиг. 12 представлен корпус пускового устройства для запуска работы установочного башмака;
[0031] на фиг. 13 представлен начальный экран HMI для управления и контроля работы всей системы установочного башмака в соответствии с настоящими идеями;
[0032] на фиг. 14 представлен отдельный экранный контроллер для выбора использования отдельных кнопок башмака в нижней части настоящего начального экрана HMI; и
[0033] на фиг. 15 представлен интерфейс для индикации и управления поворотными операциями для описанного в настоящем документе установочного башмака 22.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0034] Ниже описан один или более вариантов осуществления настоящего изобретения. Следует отметить, что эти и любые другие варианты осуществления являются иллюстративными и предназначены для иллюстрации изобретения, а не ограничения. Хотя изобретение широко применимо к различным типам систем, невозможно включить все возможные варианты осуществления и контексты изобретения в настоящее описание. После прочтения настоящего описания многие альтернативные варианты осуществления настоящего изобретения станут очевидными для специалистов в данной области техники.
[0035] На фиг. 1 представлена буровая установка 10, которая может использоваться для добычи энергоресурсов на нефтяном месторождении или аналогичном месте. Буровая установка 10 включает в себя надстройку 12 и платформу 14. На платформе 14 расположена кабина 16 оператора. В кабине 16 оператора находятся средства управления, информация, карты и рабочая зона для выполнения операций, необходимых для работы и перемещения буровой установки 10. Под платформой 14 расположены структурные элементы 18, которые обеспечивают физическую поддержку буровой установки 10, когда буровое устройство бурит и использует оборудование для поиска подземных энергоресурсов. В основании 20 буровой установки 10 находятся установочные башмаки 22, для обеспечения существенного аспекта новых признаков и функций настоящего изобретения.
[0036] На фиг.2 более подробно показано крепление установочных башмаков 22 к основанию 20 буровой установки 10. Следует отметить, что буровая установка 10 включает в себя четыре установочных башмака 22, прикрепленных в точках 24, 26, 28 и 30 основания 20. В зависимости от буровой установки 10 могут использоваться другие конфигурации. Например, на конкретной буровой установке могут использоваться шесть, восемь или более точек крепления. Однако для целей настоящего изобретения на фиг. 2 показаны четыре установочных башмака 22.
[0037] На фиг. 2 изображена целевая область 29, над которой буровая установка может быть точно расположена с использованием описанных в настоящем документе способа и системы. Как только буровая установка достигает целевой области 29, оператор может предпринять дальнейшие шаги для размещения буровой установки 10 в требуемом месте. Но, кроме того, благодаря возможности вращения с помощью описанного в настоящем документе установочного башмака 22 оператор может полностью поворачивать или вращать буровую установку 10 с помощью беспроводного управления установочными башмаками 22. Электронные, электрические и механические компоненты, их работа и использование, как описано в настоящем документе, проясняют, как описанный в настоящем документе объект изобретения достигает этих результатов.
[0038] Во время работы установочный башмак 22 прикручивается болтами, крепится штифтами или иным образом прикрепляется к раме буровой установки 10. Затем к каждому из прикрепленных установочных башмаков 22 подключают источник питания 480 В. Источник питания 480 В, наиболее вероятно, будет поступать от генераторной установки, расположенной на буровой установке 10. Затем блок контроллера, как описано в настоящем документе, который, вероятно, будет расположен в кабине 16 оператора, будет управлять операциями установочного башмака 22.
[0039] Оператор буровой установки может использовать беспроводной дистанционный контроллер, как описано ниже, для управления работой установочных башмаков 22. Таким образом, например, если требуется изменение положения на 2,4 км (1,5 мили), оператор может наметить соответствующий путь от текущего положения до положения на расстоянии 2,4 км (1,5 мили). С помощью беспроводного контроллера оператор может управлять перемещением установочного башмака 22 и углом или траекторией установочного башмака 22 для завершения перемещения на 2,4 км (1,5 мили).
[0040] Другой аспект описанной в настоящем документе системы установочного башмака 22 относится к самонастраивающейся конфигурации каждого установочного башмака. Таким образом, в случае выхода установочного башмака 22 из строя, буровая бригада может отсоединить вышедший из строя установочный башмак 22 и заменить его новым рабочим установочным башмаком. Затем беспроводной контроллер может быть связан с вновь установленным установочным башмаком 22 просто путем изменения запрограммированного IP-адреса контроллера для использования при работе с программируемым логическим контроллером.
[0041] Особенно важный аспект описанного в настоящем документе установочного башмака 22 относится к его выбираемой независимой и/или подчиненной возможности регулирования по вертикали, горизонтали и повороту, как будет описано ниже. Благодаря независимой работе система в целом становится более надежной и гибкой. Это связано с тем, что движение буровой установки не зависит от совместной работы всех четырех установочных башмаков или от того, что они физически связаны друг с другом для изменения положения буровой установки.
[0042] В настоящем варианте осуществления раскрытого объекта изобретения установочные башмаки 22 могут перемещать буровую установку 10 с массой от 294 835 до 385 553 кг (от 650000 до 850000 фунтов). В настоящей системе грузоподъемность составляет 544 310 кг (1200000 фунтов).
С каждым шагом установочного башмака 22 можно осуществлять перемещение на расстояние примерно в 0,9 м (1 ярд). Таким образом, на практике можно перемещать буровую установку с помощью описанных установочных башмаков на расстояние до 1,6 км (1 мили) в течение 88 часов для изменения положения такой массы и конструкции.
[0043] На фиг. 3 представлен вид сверху вниз буровой установки 10, чтобы проиллюстрировать ориентацию и расположение установочных башмаков 22 в четырех углах буровой установки 10. Как было показано ранее, платформа 14 поддерживает кабину 16 оператора и обеспечивает основу, на которой может поддерживаться надстройка 12. На фиг. 3 важно указание сигналов 32, 34, 36 и 38 беспроводной технологии. Здесь следует понимать, что каждый установочный башмак 22 способен принимать и отправлять отдельный беспроводной сигнал с использованием встроенного контроллера, находящегося на установочном башмаке 22. Таким образом, беспроводной контроллер будет работать удаленно, например, в кабине 16 оператора, чтобы взаимодействовать с подключенным беспроводным контроллером, встроенным в установочный башмак 22.
[0044] Беспроводное управление описанной в настоящем документе системы может приводить в действие установочный башмак 22 на расстоянии до 107 м (350 футов). Беспроводное управление позволяет оператору отдельно изменять направление и высоту установочного башмака 22 в соответствии с требованиями местности, на которой оператор устанавливает буровую установку. При этом все установочные башмаки могут быть подчинены друг другу и одному контроллеру, так что их работа будет согласованной или синхронной при перемещении из одного полевого положения в другое.
[0045] На фиг. 4 представлен важный аспект описанной в настоящем документе системы установочного башмака 22 для перемещения буровой установки 10. Рассмотрим месторождение 40 энергоресурсов, как показано на фиг. 4. Месторождение 40 энергоресурсов может включать в себя множество точек, на которых может быть размещена буровая установка 10. Например, в точке А буровая установка 10 может быть расположена на верхнем или более высоком уровне. В точке В буровая установка 10 может быть перемещена на более низкий уровень. Затем буровая установка 10 может быть перемещена в следующую точку С, где может осуществляться новое бурение. Наконец, в точке D буровая установка 10 может быть на месте.
[0046] Следует отметить, что в каждой из точек А, В, С и D, например, местность нефтяного месторождения 40 может различаться как по высоте, так и по уклону. Важным аспектом системы установочного башмака 22 согласно настоящему изобретению является способность адаптации к этим вариациям. Это связано с тем, что каждый из установочных башмаков 22 на буровой установке 10 может принимать высоту, которая является отдельной и отличной от высоты других установочных башмаков 22. Это индивидуальное управление каждым установочным башмаком 22 на буровой установке 10 обеспечивает более быстрое и гибкое размещение буровой установки при проведении разведки энергоресурсов на месторождении.
[0047] Индивидуальное управление и регулировка каждого установочного башмака 22 позволяет избежать значительной проблемы, связанной с известными системами, в которых изменение положения буровой установки требует прекращения всех операций на буровой установке. Время, необходимое для открепления известных установочных башмаков и, при необходимости, изменения гидравлической подачи, чтобы отсоединить соответствующую гидравлическую подачу, требует, чтобы рабочие прекратили работу на буровой установке. Это может быть очень дорогостоящим с точки зрения простоя буровых работников, поскольку управление и манипулирование известными установочными башмаками изменяются. Описанная в настоящем документе способность системы установочного башмака 22 избегать этого простоя представляет собой важную ценность для производителя энергоресурсов.
[0048] Дополнительный аспект настоящего способа и системы включает в себя гибкое программирование, обеспечиваемое независимой беспроводной связью с каждым установочным башмаком 22 на буровой установке 10. Например, некоторые приложения машинного обучения могут разрешать автоматическое или запрограммированное изменение положения буровой установки 10. При анализе местности, на которой работает буровая установка, алгоритмы потенциальных движений могут быть сохранены в памяти обработки контроллера для выполнения запланированным или оперативным образом в соответствии с динамическими условиями на месторождении.
[0049] На фиг. 5А, 5В, 5С, 5D, 5Е и 5F представлено расположение,
управление и операции, доступные при использовании независимо управляемого установочного башмака 22. Движение буровой установки 10 может определяться поперечным и вращательным движением установочного башмака 22 и вертикальным изменением толкателя 42 цилиндра на установочном башмаке 22, когда установочный башмак 22 перемещается по требуемой траектории.
[0050] Таким образом, на фиг. 5А показано, что установочный башмак 22 входит в зацепление с землей посредством толкателя 42 цилиндра, выступающего для приведения опоры 44 к земле. На фиг. 5В показано, что при втягивании толкателя 42 цилиндра контакт установочного башмака 22 с землей прекращается, когда опора 44 поднимается. Подъемная опора 44 обеспечивает максимальную свободу движения опоры 44 под толкателем 42 цилиндра. На фиг. 5С показано, что посредством перемещения цилиндров 46 поперечного перемещения установочный башмак 22 может занять первое положение. Затем при втягивании цилиндра 46 поперечного перемещения опора 44 принимает другое положение, обеспечивая боковое движение установочного башмака 22. Повторяющееся выдвижение и втягивание цилиндров 46 поперечного перемещения обеспечивает необходимое боковое движение для работы установочного башмака 22 42.
[0051] На фиг. 5Е и 5F дополнительно показано, что посредством вращения толкателя 42 цилиндра опора 4044 может вращаться. Вращательное движение толкателя 42 цилиндра для поворота опоры 40 является дополнительным признаком описанной в настоящем документе системы и обеспечивается за счет использования поворотного механизма вместе со схемой управления установочным башмаком 22 для инициирования поворота толкателя 44 цилиндра. Вращение толкателя 42 цилиндра в сочетании с работой опоры 44 на установочном башмаке 22 обеспечивает вращательное движение установочного башмака 22. Эти операции полностью описаны и объяснены ниже.
[0052] Аспектом независимо адресуемого установочного башмака 22 согласно настоящему изобретению является возможность совместного перемещения всех установочных башмаков 22 на буровой установке 10 с помощью беспроводного командного управления. С помощью беспроводных команд оператор может независимо и дистанционно перемещать всю буровую установку из первого положения во второе положение. Команды для выполнения этих движений поступают от беспроводных сигналов контроллера оператора, которые принимают установочные башмаки 22 и на которые они реагируют. Благодаря обеспечению независимой связи и управления для каждого установочного башмака, описанная в настоящем документе система может перемещать буровую установку по дуге или криволинейной траектории. Это также дает возможность реагировать на более разнообразные ландшафты при перемещении буровой установки в различные положения на нефтяном месторождении.
[0053] Пример независимого управления поворотом установочного башмака 22 может быть следующим. Одному установочному башмаку 22 может потребоваться поворот на 270°, в то время как другому установочному башмаку 22 может потребоваться поворот только на 90° или 180°. Благодаря способности изменять диапазон поворота каждого индивидуально адресуемого установочного башмака 22, возможно нелинейное направленное положение. Таким образом, независимо управляемые и адресуемые установочные башмаки 22 могут позволять буровой установке полностью поворачиваться в фиксированном положении на нефтяном месторождении, чтобы изменить ее ориентацию в любом направлении, которое может потребоваться оператору.
[0054] На фиг. 6 и 7 показаны основные рабочие компоненты установочного башмака 22. В частности, на фиг. 6 показаны автономная гидравлическая силовая установка 48 и встроенный механизм 50 управления. Кроме того, беспроводной блок 52 управления обеспечивает связь между центральным контроллером, описанным ниже, и встроенным механизмом 50 управления. На фиг. 7 представлена схема толкателя 42 цилиндра, который включает в себя корпус 54 и поворотный механизм 56. Работа автономной гидравлической силовой установки 48 и встроенных средств 50 управления с помощью беспроводных средств 52 управления, а также поворотное и вертикальное управление, обеспечиваемое поворотным механизмом 56, толкателем 54 цилиндра и вертикальным корпусом 54, более четко описаны ниже.
[0055] Автономная HPU 48 и толкатель 42 цилиндра включают в себя устройства позиционирования, которые предоставляют информацию обратной связи по положению. Механизм обратной связи в автономной HPU 48 и беспроводных средствах 52 управления обеспечивает сигналы обратной связи и ответные сигналы, относящиеся как к линейному, так и к поворотному движению опоры 44 установочного башмака 22. Установочные башмаки предшествующего уровня техники могут обеспечивать обратную связь в прямолинейном направлении. Однако установочный башмак 22 обеспечивает в автономной HPU 48 и встроенных средствах 52 управления способность реагировать на поворотные и вертикальные изменения, а также на линейные изменения. В системе установочного башмака 22 по настоящему изобретению измерения крена, тангажа и рыскания могут обеспечиваться датчиками внутри установочного башмака. Это приводит к гораздо более точному определению конфигурации буровой установки и изменений положения по месторождению.
[0056] Механизм обратной связи в установочном башмаке 22 определяет поворот опоры 44. Соответственно, когда автономная HPU 48 и встроенные средства управления 52 реагируют на команду повернуть опору 44 на определенное количество градусов, система обратной связи может измерить, действительно ли был выполнен поворот на это количество градусов. Известные установочные башмаки не обеспечивают бесступенчатого изменения угла поворота опор. Такие конфигурации также не обеспечивают беспроводное управление опорами для независимого расположения.
[0057] Другой аспект настоящего изобретения относится к рабочим характеристикам исполнительных приводов в компонентах гидравлического управления установочного башмака 22. Благодаря наличию контура подогрева в приводах повышается надежность и сводятся к минимуму неблагоприятные последствия резких перепадов температуры. Это может быть вызвано разницей температур между теплой нефтью, которая может находиться на месторождении, и холодной атмосферой, которая может существовать на буровой установке над поверхностью земли. Привод по настоящему изобретению включает в себя схему, которая нагревает привод и установочные башмаки, когда они работают в более холодной окружающей среде. Все средства диагностических измерений и управления данными работают в блоке HPU. Сюда входят датчики давления, датчики температуры и другие датчики параметров, связанных с работой установочного башмака.
[0058] На фиг. 7 представлен толкатель 42 цилиндра в соответствии с идеями настоящего изобретения. Толкатель 42 цилиндра включает в себя кодер 66 и двигатель 68 поворота. Поворотный механизм 68 управляет работой поворотной шестерни 70. Поворотный механизм 68 управляет углом поворота и угловой обратной связью толкателя 42 цилиндра. Поворотный 68 механизм включает в себя узел реечной передачи, который вращает толкатель 42 цилиндра, приводя в действие прикрепленные шестигранные опоры 44. Поворотный механизм 68 позволяет вращать опоры 44 с минимально возможным трением и потреблением энергии при перемещении буровой установки 10 посредством вращательного или поворотного движения. Это связано с тем, что вращение происходит, когда опора 44 поднята и не контактирует с землей.
[0059] На фиг. 8 показан вид сзади в перспективе гидравлического блока 58. Гидравлический блок 58 включает в себя двигатель 48 DS и LVDT 56 толкателя 42 цилиндра. Кроме того, гидравлический блок 58 включает в себя корпус 72 пускового устройства.
[0060] На фиг. 9 представлен увеличенный вид задней части гидравлического блока 58. В частности, на двигателе 48 DS установлен датчик 76 давления. Кроме того, рядом с двигателем 48 DS имеется реле 78 предупреждения о низком уровне и реле 80 выключения при высокой температуре. Клапаны, связанные с блоком 58 управления, включают в себя клапан 82 толкателя, клапан 84 цилиндра поперечного движения и клапан 86 поворота.
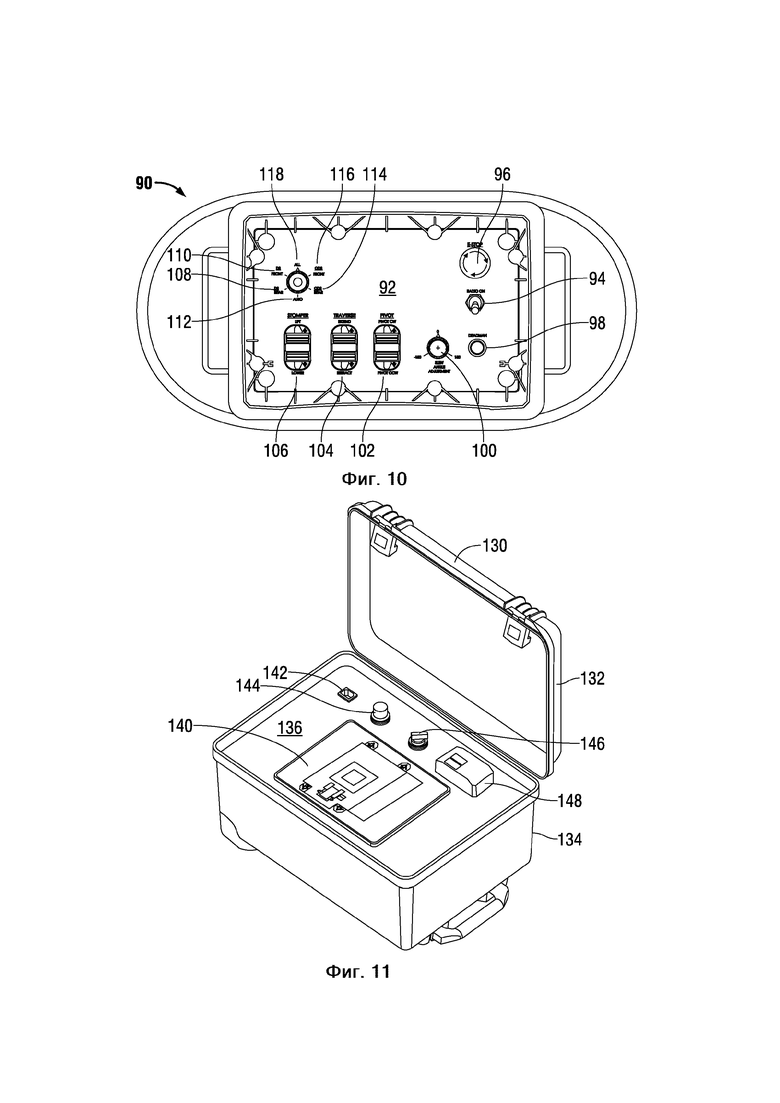
[0061] На фиг.10 показано беспроводное устройство 90 дистанционного управления для управления работой установочных башмаков 22 в данной конфигурации буровой установки 10. Беспроводное устройство 90 дистанционного управления включает в себя беспроводную панель 92 дистанционного управления. Беспроводная панель 92 дистанционного управления обеспечивает многочисленные органы управления, приводимые в действие пальцами, для управления установочными башмаками 22. Для начала переключатель 94 включения/выключения управляет работой беспроводного устройства 90 дистанционного управления. Выключатель 96 аварийного останова обеспечивает срабатывание аварийного останова установочных башмаков 22. Аварийная кнопка 98 и потенциометр 100 угла поворота управляют работой установочного башмака 22. Органы управления установочным башмаком 22 с беспроводной панели 92 дистанционного управления включают в себя джойстик 102 поворота, джойстик 104 цилиндра поперечного перемещения и джойстик 106 толкателя. Шестипозиционный селекторный переключатель 108 позволяет оператору выбирать, какой установочный башмак 22 будет принимать сигналы беспроводного управления. Таким образом, шестипозиционный селекторный переключатель 108 может выбирать переднее положение 110 DS, заднее положение 112 DS, автоматическое положение 114, заднее положение 114 ODS и переднее положение 116 ODS. Более того, положение 118 ALL (ВСЕ) или ведомое положение может быть выбрано с помощью шестипозициоиного селекторного переключателя 108.
[0062] На фиг. 11 представлен блок 130 управления работой установочного башмака 22 согласно описанным в настоящем документе способу и системе. Блок 130 включает в себя крышку 132 и основание 134. В основании 134 находится панель 136 питания и устройств ввода команд управления. В частности, устройства ввода команд управления включают в себя экран 140 HMI, который обеспечивает ввод и управление сигналами работы установочных башмаков 22. Розетка 142 электропитания обеспечивает электропитание блока 130. Индикатор 144 питания показывает состояние контроллера. Селекторный переключатель 146 включения/выключения управляет электропитанием контроллера 130. Приемопередатчик 148 принимает сигналы беспроводной связи от встроенной схемы беспроводной связи на установочном башмаке 22.
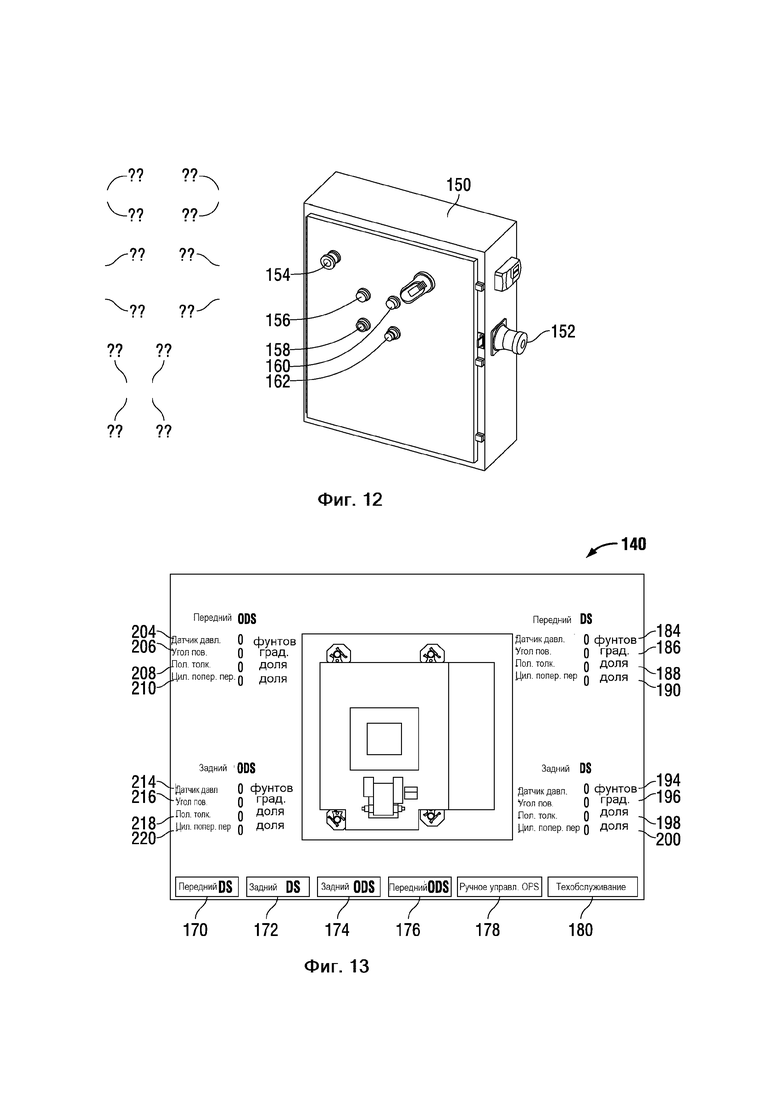
[0063] На фиг. 12 представлен корпус 150 пускового устройства для запуска работы установочного башмака 22. Корпус 150 пускового устройства включает в себя розетку 152 электропитания. Органы управления на корпусе 150 пускового устройства включают в себя кнопку 154 аварийного останова, переключатель 156 включения/выключения, кнопку 58 включения электропитания, кнопку 160 ручного останова и кнопку 162 ручного пуска.
[0064] На фиг. 13 представлен начальный экран 140 HMI. Внизу начального экрана 140 HMI расположены кнопки для управления соответствующими установочными башмаками 22. К ним относятся кнопка 170 FRONT DS (Передний DS), кнопка 172 REAR DS (Задний DS), кнопка 174 REAR ODS (Задний ODS), кнопка 172 FRONT ODS (Передний ODS), кнопка 178 OPS MANUAL (Ручное управление OPS) и кнопка 180 MAINTENANCE (Техобслуживание). Начальный экран 140 HMI дополнительно включает в себя соответствующие индикаторы для установочных башмаков 22. Таким образом, для установочного башмака 22 182 FRONT DS (Передний DS) индикаторы FRONT DS (Передний DS) включают в себя индикатор 184 датчика давления, индикатор 188 угла поворота, индикатор 188 толкателя и индикатор 190 цилиндра поперечного перемещения. Установочный башмак 22, 192 REAR DS (Задний DS) обеспечивает индикатор 194 датчика давления, индикатор 196 угла поворота, индикатор 198 положения толкателя и индикатор 200 положения цилиндра поперечного перемещения. Установочный башмак 22 202 FRONT ODS (Передний ODS) обеспечивает индикатор датчика 204 давления, индикатор 206 угла поворота, индикатор 208 толкателя и индикатор 210 цилиндра поперечного перемещения. Установочный башмак 22 212 REAR ODS (Задний ODS) обеспечивает индикатор 214 датчика давления, индикатор 216 угла поворота, индикатор 218 толкателя и индикатор 220 цилиндра поперечного перемещения.
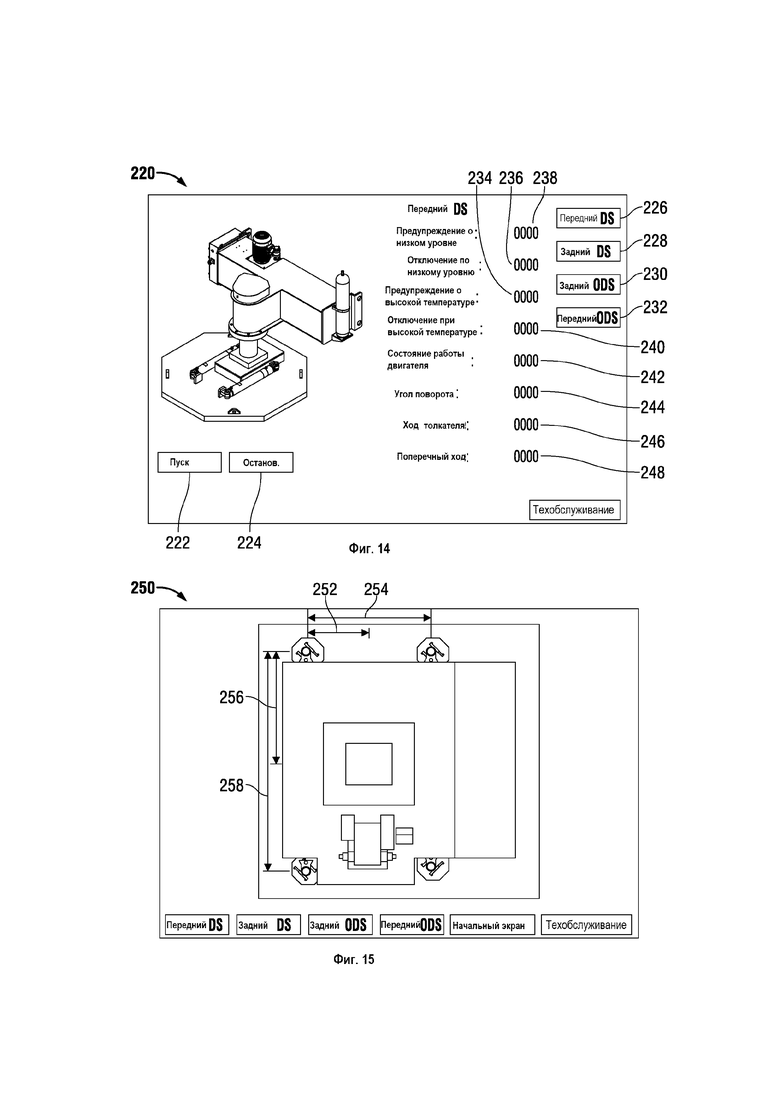
[0065] На фиг. 14 представлен отдельный экран 220 контроллера для включения/выключения FRONT DS (Передний DS) с помощью ранее указанных кнопок в нижней части начального экрана 140 HMI. Например, при нажатии кнопки 170 FRONT DS (Передний DS), показанной на фиг. 13, изображающей начальный экран 140 HMI, появится экран 220 FRONT DS (Передний DS), показанный на фиг.14. Экран 220 FRONT DS (Передний DS) обеспечивает ввод управления для установочного башмака 22 в переднем местоположении 202 DS.
[0066] Для пуска положения 182 FRONT DS (Передний DS) оператор нажимает на отдельном экране 220 FRONT DS (Передний DS) кнопку 222 FRONT DS START (Пуск переднего DS). Для останова положения 182 FRONT DS (Передний DS) оператор нажимает кнопку 224 STOP (Останов). Экран 220 FRONT DS (Передний DS) также обеспечивает кнопки для перемещения или перехода к другим экранам контроллера. К ним относятся кнопка 226 НОМЕ (Начальный экран), кнопка 228 REAR DS (Задний DS), кнопка 230 REAR ODS (Задний ODS) и кнопка 232 FRONT ODS (Передний ODS). Экран 220 FRONT DS (Передний DS) обеспечивает индикаторы состояния установочного башмака 22 в положении 202 FRONT DS (Передний DS). К ним относятся индикатор 234 предупреждения о низком уровне, индикатор 236 отключения по низкому уровню и индикатор 238 предупреждения о высокой температуре. Кроме того, предусмотрен индикатор 240 отключения при высокой температуре, индикатор 242 состояния работы двигателя, индикатор 244 угла поворота, индикатор 246 хода толкателя и индикатор 248 поперечного хода.
[0067] Эти команды подаются от главного контроллера к индивидуальным установочным башмакам 22. Контроллер настоящей системы использует шину, чтобы обеспечить необходимую обратную связь и управление для независимого и/или совместного управления установочными башмаками 22.
[0068] На фиг. 15 также показана индикация поворота установочного башмака 22. Здесь отображается индикатор 252 Lp, индикатор 254 L, индикатор 256 Wp и индикатор 258 W.
[0069] В нижеследующем описании рассматриваются различные варианты использования раскрытых в настоящем документе системы и способа. При использовании блока управления последовательность операций может быть следующей: ИНДИВИДУАЛЬНЫЙ РЕЖИМ - все четыре перемещающиеся опоры прикреплены к буровой установке, а корпуса 50 пускового устройства подключены к источнику питания 480 В переменного тока посредством розетки 152 электропитания. Каждый корпус 50 пускового устройства имеет два двухпозиционных переключателя, расположенных внутри корпуса 50 пускового устройства. Оператор должен убедиться, что микропереключатели установлены на следующие настройки (Front DS (Передний DS)=00, Rear DS (Задний DS)=10, Rear ODS (Задний ODS)=01, Front ODS (Передний ODS)=11); это покажет расположение каждой опоры на буровой установке.
[0070] Переключатель 156 включения/выключения, расположенный на корпусе 50 пускового устройства, переводят в положение ON (Вкл.), и лампа 158 включения электропитания должна загореться. Указанную последовательность операций повторяют, пока все 4 корпуса не будут включены. Убеждаются, что кнопка 154 аварийного останова на корпусе пускового устройства не нажата.
[0071] Экран 140 беспроводного HMI блока 130 в защитном кейсе Pelican извлекают из хранилища, шнур питания подключают к розетке 142 электропитания, а селекторный переключатель 146 включения/выключения переводят в положение ON (Вкл.). Экран 140 HMI включается, и загорается лампа 144 включения электропитания. После включения блока 130 в защитном кейсе Pelican беспроводной приемник 148 начнет связываться с идентичным приемником 148, расположенным на каждой опоре системы перемещения.
[0072] Беспроводную панель 92 дистанционного управления берут из хранилища, переключатель 94 включения/выключения переводят в положение ON (ВКЛ.), а аварийный останов 96 должен быть отключен. При использовании экрана 140 HMI нажимают кнопку 170 FRONT DS (Передний DS) внизу начального экрана 140 HMI. На экране 220 FRONT DS (Передний DS) нажимают кнопку 222 START (Пуск) в нижнем левом углу экрана, чтобы запустить передний двигатель DS. Нажав кнопку 224 STOP (Останов) в нижней левой части экрана, оператор может остановить передний двигатель 48 DS. Если оператор не хочет запускать двигатель дистанционно с экрана 140 HMI, для локального пуска двигателя можно использовать кнопку 162 START (Пуск) и кнопку 160 STOP (Останов), расположенные на каждом корпусе 50 пускового устройства.
[0073] После того, как передний двигатель 48 DS был запущен с помощью экрана 144 беспроводного HMI, оператор может использовать беспроводную панель 92 дистанционного управления для установки переднего башмака DS. С помощью 6-позиционного селекторного переключателя 108, оператор выбирает режим 110 FRONT DS (Передний DS).
[0074] С помощью экрана 140 HMI оператор может проверить состояние системы HPU для опоры системы перемещения Front DS (Передний DS). Состояние опоры системы перемещения Front DS (Передний DS) можно найти на странице 220 Front DS (Передний DS) с параметрами 234, 236, 238, 240, 242, 244, 246, 248. Если все параметры в норме, оператор может начать размещение опоры системы перемещения.
[0075] С помощью беспроводной панели 92 дистанционного управления убеждаются, что потенциометр 100 поворота установлен на 0 градусов. Затем начинают медленно выдвигать джойстик 102 толкателя, удерживая нажатой аварийную кнопку 98. Если отпустить либо джойстик 102 толкателя, либо аварийную кнопку 98, клапан 82 толкателя вернется в центральное положение, и цилиндр 56 толкателя перестанет выдвигаться. Джойстик 104 поперечного перемещения и потенциометр 100 поворота не могут работать, когда джойстик 102 толкателя включен. На беспроводной панели 92 дистанционного управления одновременно может работать только один оператор.
[0076] После того, как цилиндр 56 толкателя выдвигается приблизительно на 75% от полного хода цилиндра, оператор может, при желании, изменить угол привода поворота, регулируя потенциометр 100 поворота, удерживая нажатой аварийную кнопку 98. Регулируя потенциометр 100 поворота, клапан 86 поворота откроется, тем самым поворачивая двигатель 68 поворота на требуемый угол. Процент хода цилиндра толкателя отображается либо на начальном экране 140 HMI 140, либо на странице 220 отдельной опоры. См. элемент 188 и элемент 246 соответственно. Цилиндр 56 толкателя на каждой опоре содержит LVDT 56, который точно измеряет ход цилиндра при его выдвижении и втягивании. Оператор не может управлять джойстиком 102 одновременно с потенциометром 100 угла поворота, поэтому оператор должен сначала отпустить джойстик 102, как только будет достигнуто 75% полного хода цилиндра.
[0077] После регулировки угла 186 или 244 поворота оператор может отвести цилиндр 56 толкателя в исходное положение, используя джойстик 102 толкателя и аварийную кнопку 98. Оператор также может определить, полностью ли втянут цилиндр 56 толкателя на начальной странице 140 экрана 140 HMI или на странице 220 отдельной опоры. См. элемент 188 и элемент 246 соответственно. Угол поворота отображается либо на начальной странице 140 экрана 140 HMI, либо на странице 220 отдельной опоры. См. элемент 186 и элемент 244, соответственно. Привод 68 поворота на каждой опоре содержит кодер 66, который точно измеряет угол каждого привода поворота, когда он вращается по часовой или против часовой стрелки.
[0078] Убеждаются, что цилиндр 60 поперечного перемещения втянут и находится в исходном положении. Оператор может определить, полностью ли втянут цилиндр 60 поперечного перемещения и находится ли он в исходном положении, просмотрев начальную страницу 140 экрана 140 HMI или отдельный экран 220. См. элемент 190 и элемент 248 соответственно. Один из цилиндров 60 поперечного перемещения на каждой опоре содержит LVDT 64, который точно измеряет ход цилиндра при его выдвижении и втягивании. Оператор может регулировать клапан 84 поперечного перемещения и цилиндр 60 поперечного перемещения, используя одновременно джойстик 104 поперечного перемещения и аварийную кнопку 98. Джойстиком 104 поперечного перемещения нельзя управлять одновременно с джойстиком 102 толкателя или потенциометром 100 поворота.
[0079] После того, как опора Front DS (Передний DS) достигнет соответствующего угла, а цилиндр 56 толкателя и цилиндры перемещения 60 полностью втянуты и находятся в исходном положении, повторяют шаги с 6 по 14 для других 3 опор (REAR DS (Задний DS) 112, FRONT ODS (Передний ODS) 116, REAR ODS (ЗАДНИЙ ODS) 114)
[0080] Операции могут происходить также в режиме ALL (Все) следующим образом: после завершения проверки настройки и технического состояния для каждой отдельной опоры перемещения буровой установки система перемещения буровой установки готова к использованию в режиме ALL (Все). 6-позиционный селекторный переключатель 108 на беспроводной панели 92 дистанционного управления переводят в режим 118 ALL (Все). Угол привода 68 поворота устанавливают для каждой опоры в индивидуальном режиме (34а, 34b, 34d и 34е). Теперь оператор готов к перемещению буровой установки. Удерживая джойстик 102 толкателя и удерживая нажатой аварийную кнопку 98, оператор может выдвигать цилиндры 56 толкателя до тех пор, пока не будет достигнут конец хода. Конец хода отображается на начальном экране 140 экрана 140 HMI или на отдельных экранах 220.
[0081] По достижении конца хода цилиндра 56 толкателя, оператор отпускает джойстик 102 толкателя и выдвигает джойстик 104 поперечного перемещения, удерживая нажатой аварийную кнопку 98. Цилиндр 60 поперечного перемещения будет выдвигаться, пока не будет достигнут конец хода. Конец хода отображается на начальном экране 140 экрана 140 HMI или на отдельных экранах 220. После того, как цилиндр 60 поперечного перемещения полностью выдвинется, оператор отпускает джойстик 104 поперечного перемещения и аварийную кнопку 98.
[0082] Теперь оператор может опустить буровую установку, перемещая джойстик 102 толкателя вниз, удерживая нажатой аварийную кнопку 98. Как только цилиндр 56 толкателя достигнет конца хода, оператор может отпустить джойстик 102 толкателя. Конец хода отображается на начальном экране 140 экрана 140 HMI или на отдельных экранах 220.
[0083] Оператор может втянуть цилиндр 60 поперечного перемещения, перемещая джойстик 104 поперечного перемещения в направлении вниз, удерживая нажатой аварийную кнопку 98. Как только цилиндр 60 поперечного перемещения достигнет конца хода, оператор может отпустить джойстик 104 поперечного перемещения. Конец хода отображается на начальном экране 140 экрана 140 HMI или на отдельных экранах 220.
[0084] Шаги с 14 по 17 повторяют до тех пор, пока буровая установка не достигнет требуемого места назначения или пока не потребуется индивидуальная регулировка.
[0085] Если необходимо отрегулировать угол, под которым перемещается установка, это можно выполнить в режиме 118 ALL (Все), выдвинув цилиндр 56 толкателя приблизительно на 3А хода, а затем отпустив джойстик 102 толкателя. Удерживая нажатой аварийную кнопку 98, оператор может отрегулировать угол поворота до требуемой траектории с помощью потенциометра 100 поворота. По окончании регулировки угла поворота 186, 42, 53 и 57) оператор может возобновить выдвижение цилиндра 56 толкателя до полного хода.
[0086] Еще одним рабочим режимом является режим AUTO (Авто), который работает следующим образом: если оператор хочет использовать буровую установку в режиме 120 AUTO (Авто), тогда ему сначала необходимо отрегулировать угол 186, 42, 53 и 57 поворота буровой установки в режиме 118 ALL (Все). Как только буровая установка будет ориентирована в правильном направлении, оператор может перевести 6-позиционный селекторный переключатель 108 в режим 120 AUTO (Авто).
[0087] Оператор удерживает нажатой аварийную кнопку 98 и удерживает джойстик 104 поперечного перемещения в выдвинутом положении, при этом буровая установка будет перемещаться в цикле подъема, выдвижения в поперечном направлении, опускания и втягивания в поперечном направлении, пока оператор не отпустит джойстик 104 поперечного перемещения или аварийную кнопку 98.
[0088] Установочный башмак 22 по настоящему изобретению может работать в режиме PIVOT (Поворот) следующим образом: если оператор хочет повернуть буровую установку, то это представляет собой предварительно запрограммированный поворот буровой установки вокруг устья скважины. Оператор сначала переходит к экрану 250 PIVOT (Поворот) и вводит следующие значения W 258, WP 256, L 254 и LP 252. После ввода этих значений размеров рабочей площадки буровой установки буровая установка будет готова к повороту.
[0089] Перед выполнением операции поворота оператор должен убедиться,
что цилиндр 56 толкателя и цилиндр 60 поперечного перемещения находятся в исходных положениях и что двигатель 68 поворота установлен на угол 0°. Как только это будет проверено, оператор устанавливает 6-позиционный селекторный переключатель 108 на беспроводной панели 92 дистанционного управления в режим 120 AUTO (Авто). Находясь в режиме 120 AUTO (Авто), оператор просто удерживает нажатой аварийную кнопку 98 и выдвигает или втягивает джойстик 102 поворота, чтобы повернуть буровую установку в направлении по часовой или против часовой стрелки.
[0090] После завершения маневра поворота оператор может отпустить
джойстик 102 поворота.
[0091] Формула поворота выглядит следующим образом:
a. FODS 116



b. FDS110



c. RDS 112



d. RODS 114



[0092] Система установочного башмака 22 согласно настоящему изобретению включает в себя ряд следующих блокировок:
[0093]  Реле 78 предупреждения о низком уровне - при активации на любой опоре отправляет предупреждение об ошибке на главный экран HMI. На отдельном экране 220 элемент 234 изменит состояние на предупреждение.
Реле 78 предупреждения о низком уровне - при активации на любой опоре отправляет предупреждение об ошибке на главный экран HMI. На отдельном экране 220 элемент 234 изменит состояние на предупреждение.
[0094]  Реле 78 предупреждения о высокой температуре – при активации на любой опоре отправляет предупреждение об ошибке на главный экран HMI. На отдельном экране 220 элемент 236 изменит состояние на предупреждение.
Реле 78 предупреждения о высокой температуре – при активации на любой опоре отправляет предупреждение об ошибке на главный экран HMI. На отдельном экране 220 элемент 236 изменит состояние на предупреждение.
[0095]  Отключение 80 при низком уровне - при активации отключит электропитание опоры, для которой зарегистрирован низкий уровень, и отключит средства управления других опор.
Отключение 80 при низком уровне - при активации отключит электропитание опоры, для которой зарегистрирован низкий уровень, и отключит средства управления других опор.
[0096]  Отключение 80 при высокой температуре - при активации отключит электропитание опоры, для которой зарегистрирована высокая температура, и отключит средства управления других опор.
Отключение 80 при высокой температуре - при активации отключит электропитание опоры, для которой зарегистрирована высокая температура, и отключит средства управления других опор.
[0097]  Состояние работы двигателя - двигатель должен быть в рабочем состоянии, прежде чем будут использоваться какие-либо средства управления на беспроводной панели дистанционного управления. В режиме 118 ALL (Все) и режиме 120 AUTO (Авто) должны присутствовать все 4 состояния работы двигателя, чтобы можно было управлять беспроводной панелью 92 дистанционного управления.
Состояние работы двигателя - двигатель должен быть в рабочем состоянии, прежде чем будут использоваться какие-либо средства управления на беспроводной панели дистанционного управления. В режиме 118 ALL (Все) и режиме 120 AUTO (Авто) должны присутствовать все 4 состояния работы двигателя, чтобы можно было управлять беспроводной панелью 92 дистанционного управления.
[0098]  Сигнал 148 аварийного останова - если на беспроводной панели 92 дистанционного управления нажата кнопка аварийного останова, то основание отправит сигнал на ПЛК, который немедленно выключит средства управления для каждой опоры системы перемещения.
Сигнал 148 аварийного останова - если на беспроводной панели 92 дистанционного управления нажата кнопка аварийного останова, то основание отправит сигнал на ПЛК, который немедленно выключит средства управления для каждой опоры системы перемещения.
[0099]  Аварийный останов на корпусе 50 - в режиме 118 ALL (Все) или режиме 120 AUTO (Авто) если нажата кнопка 152 аварийного останова на любом корпусе, будет отключено электропитание корпуса с нажатой кнопкой аварийного останова и для остальных 3 опор будут отключены их средства управления.
Аварийный останов на корпусе 50 - в режиме 118 ALL (Все) или режиме 120 AUTO (Авто) если нажата кнопка 152 аварийного останова на любом корпусе, будет отключено электропитание корпуса с нажатой кнопкой аварийного останова и для остальных 3 опор будут отключены их средства управления.
[00100] Для управления любым из джойстика 102 толкателя, джойстика 104 поперечного перемещения или потенциометра 100 поворота на беспроводной панели 92 дистанционного управления должна быть нажата аварийная кнопка 98. Аварийная кнопка 98 предотвращает случайное переключение клапанов (19, 20 и 21). Одновременно можно использовать только один из джойстиков (31, 32 и 33) или потенциометр 100. Пример: если используется джойстик 102 толкателя, то джойстик 104 поперечного перемещения, джойстик 102 поворота или потенциометр 100 поворота можно перемещать, но они не будут управлять клапаном 84 поперечного перемещения или клапаном 86 поворота.
[00101] Датчик 76 давления должен присутствовать и показывать значение не менее 2500 или заданное минимальное давление, требуемое нагрузкой перемещаемого оборудования, прежде чем можно будет задействовать любую опору системы перемещения. Показания давления отображаются на начальном экране 140 экрана 140 HMI. Эти значения показаны номерами позиций 184, 194, 214 и 204. Привод 68 поворота может быть задействован только тогда, когда цилиндр 56 толкателя находится в пределах 5 см (2 дюймов) от конца хода (т.е. буровая установка находится на высоте 5 см (2 дюймов) от земли). Значения хода цилиндра толкателя отображаются на начальном экране 140 экрана 140 HMI или на экране 220 отдельной опоры. Соответствующие значения обозначены номерами позиций 188, 198, 218 и 208 и 246.
[00102] Обратная связь 56 цилиндра толкателя - на ПЛК будет оправлен сигнал, который указывает положение цилиндра 56 толкателя. Должно присутствовать значение аналогового входного сигнала, иначе система перемещения не будет работать.
[00103] Обратная связь 64 цилиндра поперечного перемещения - на ПЛК будет оправлен сигнал, который указывает положение цилиндра 60 поперечного перемещения. Должно присутствовать значение аналогового входного сигнала, иначе система перемещения не будет работать.
[00104] Обратная связь 66 двигателя поворота - на ПЛК будет оправлен сигнал, который указывает угол двигателя 68 поворота. Должно присутствовать значение аналогового входного сигнала, иначе система перемещения не будет работать.
[00105] Другой аспект настоящего изобретения включает возможность включения машинного обучения в результате операции. Таким образом, благодаря возможности регистрировать и документировать конкретное перемещение из одного положения на нефтяном месторождении в другое, есть возможность узнать, что сработало хорошо, а что нет.Это может быть включено в набор точек данных или таблиц, которые укажут оптимальные режимы работы. Благодаря этой возможности машинного обучения возможны улучшенные операции для описанной в настоящем документе системы.
[00106] Дополнительное использование возможностей обучения и регистрации данных обеспечивает возможность проводить анализ отказов в системе, работе и условиях.
[00107] В программируемом логическом контроллере (ПЛК) есть отдельный IP-адрес для каждого установочного башмака. Соответственно, ПЛК имеет возможность напрямую связываться с IP-адресом для конкретного установочного башмака. Это позволяет управлять установочным башмаком 22 с помощью одного ПЛК для всех четырех опор.
[00108] В дополнение к использованию на нефтяном месторождении для перемещения буровых установок способ и система по настоящему изобретению могут использоваться для других применений. Такие другие применения могут включать, например, судостроительную промышленность или крупные сооружения, которые необходимо перемещать с одного места на другое для выполнения различных типов операций на судне в сухом доке или другом объекте. Еще одно применение описанной в настоящем документе конфигурации установочного башмака 22 может заключаться в перемещении противовыбросового превентора (ВОР - англ.: blowout preventer) в рабочих условиях.
[00109] Выгоды и преимущества, которые могут быть предоставлены настоящим изобретением, были описаны выше в отношении конкретных вариантов осуществления. Эти выгоды и преимущества, а также любые элементы или ограничения, которые могут привести к их появлению или усилению, не должны толковаться как критические, обязательные или существенные признаки любого из пунктов формулы изобретения или всех пунктов формулы изобретения. В контексте настоящего документа формы единственного числа включают формы множественного числа, если из контекста явно не следует иное. Также следует понимать, что термины «содержит» и/или «содержащий» или «включает в себя» и/или «включающий в себя» или любые другие их варианты, должны толковаться как неисключительно включающие элементы или ограничения, которые следуют за этими терминами. Соответственно, система, способ или другой вариант осуществления, который содержит набор элементов, не ограничивается только этими элементами и может включать в себя другие элементы, не перечисленные явно или не присущие заявленному варианту осуществления. Эти термины при использовании в данном описании определяют наличие указанных признаков, областей, целых чисел, шагов, операций, элементов и/или компонентов, но не исключают наличие или добавление одного или более признаков, областей, целых чисел, шагов, операций, элементов, компонентов и/или их группы.
Группа изобретений относится к перемещению буровой установки на месторождении без сборки и разборки структурных компонентов. Система перемещения буровой установки перемещает буровую установку или аналогичную конструкцию на нефтяном месторождении или в аналогичных условиях и включает в себя независимо управляемые установочные башмаки, прикрепляемые к буровой установке и управляемые отдельными и скоординированными командами управления положением. Каждый из множества независимо управляемых установочных башмаков может изменять положение буровой установки. Каждый из независимо управляемых установочных башмаков включает в себя корпус, прикрепленный к буровой установке, и структурную оболочку для размещения гидравлического привода и схемы беспроводного управления. Гидравлический привод обеспечивает вертикальное, горизонтальное и вращательное усилия в ответ на сигналы беспроводного управления от схемы беспроводного управления. Схема беспроводного управления передает беспроводные данные о положении, управлении и команды посредством удаленного устройства беспроводной связи и преобразует беспроводные данные о положении, управлении и команды в сигналы управления гидравлическим приводом. Толкатель цилиндра установочного башмака вертикально поднимает гидравлический привод, принимает и передает вертикальное и вращательное усилия от гидравлического привода. Узел опоры установочного башмака жестко соединяется с толкателем цилиндра установочного башмака, принимает и передает горизонтальное усилие от гидравлического привода. Толкатель цилиндра установочного башмака и цилиндр поперечного перемещения установочного башмака обеспечивают бесступенчатое регулирование положения независимо управляемого установочного башмака. Обеспечивается надежное, быстрое и простое управление размещением и положением буровой установки. 3 н. и 17 з.п. ф-лы, 20 ил.
1. Система перемещения буровой установки для перемещения буровой установки на нефтяном месторождении, содержащая:
множество независимо управляемых установочных башмаков для прикрепления к буровой установке, изменяющих положение буровой установки посредством отдельных и скоординированных команд управления положением каждому из указанного множества независимо управляемых установочных башмаков, причем каждый из указанных независимо управляемых установочных башмаков дополнительно содержит:
корпус, прикрепленный к буровой установке и обеспечивающий структурную оболочку для размещения гидравлического привода и схемы беспроводного управления;
указанный гидравлический привод для обеспечения вертикального, горизонтального и вращательного усилий в ответ на сигналы беспроводного управления от указанной схемы беспроводного управления;
указанную схему беспроводного управления для передачи беспроводных данных о положении, управлении и команд посредством удаленного устройства беспроводной связи и преобразования беспроводных данных о положении, управлении и команд в сигналы управления гидравлическим приводом;
толкатель цилиндра установочного башмака для вертикального подъема указанного гидравлического привода, а также для приема и передачи вертикального и вращательного усилий от указанного гидравлического привода;
узел опоры установочного башмака, жестко соединенный с указанным толкателем цилиндра установочного башмака, выполненный с возможностью приема и передачи указанного горизонтального усилия от указанного гидравлического привода;
цилиндр поперечного перемещения установочного башмака, соединенный с возможностью скольжения с указанным узлом опоры установочного башмака и содержащий узел гидравлического поршня и рейки для приема указанного усилия горизонтального перемещения и горизонтального перемещения в ответ на него, причем указанный цилиндр поперечного перемещения установочного башмака обеспечивает контакт с грунтом нефтяного месторождения, перемещая указанную буровую установку; и при этом дополнительно указанный толкатель цилиндра установочного башмака и указанный цилиндр поперечного перемещения установочного башмака связаны для бесступенчатого управления положением указанного независимо управляемого установочного башмака.
2. Система перемещения буровой установки по п. 1, дополнительно содержащая схему управления и возможности процессора для точного и управляемого размещения буровой установки над целевым стволом скважины.
3. Система перемещения буровой установки по п. 1, дополнительно содержащая схему управления, поворотный механизм и встроенные компоненты гидравлического управления для обеспечения бесступенчато регулируемого вращательного размещения указанного узла опоры установочного башмака.
4. Система перемещения буровой установки по п. 1, дополнительно содержащая схему управления, компоненты гидравлического управления и команды процессора для управления указанным установочным башмаком с возможностью выбора в подчиненном режиме, чтобы все установочные башмаки работали синхронно, или в индивидуальном режиме, чтобы каждый установочный башмак работал отдельно.
5. Система перемещения буровой установки по п. 1, дополнительно содержащая схему управления, компоненты гидравлического управления и команды процессора для управления указанным установочным башмаком для размещения буровой установки на меняющемся ландшафте нефтяного месторождения и местности.
6. Система перемещения буровой установки по п. 1, дополнительно содержащая схему управления, компоненты гидравлического управления и команды процессора для генерирования точных сигналов обратной связи для сообщения о надлежащей работе каждого из указанных установочных башмаков.
7. Система перемещения буровой установки по п. 1, дополнительно содержащая контур нагрева гидравлической жидкости для нагрева гидравлической жидкости в указанном гидравлическом приводе для улучшения управления указанным гидравлическим приводом при работе указанного установочного башмака на холодном нефтяном месторождении.
8. Способ перемещения буровой установки для перемещения буровой установки на нефтяном месторождении, включающий:
прикрепление множества независимо управляемых установочных башмаков к буровой установке, изменяющих положение буровой установки посредством отдельных и скоординированных команд управления положением каждому из указанного множества независимо управляемых установочных башмаков, причем указанный этап прикрепления дополнительно содержит для каждого из указанных независимо управляемых установочных башмаков следующие этапы:
размещение гидравлического привода и беспроводного управления в корпусе, прикрепленном к буровой установке и обеспечивающем структурную оболочку;
обеспечение вертикального, горизонтального и вращательного усилий в ответ на сигналы беспроводного управления от указанной схемы беспроводного управления с помощью указанного гидравлического привода;
передачу беспроводных данных о положении, управлении и команд посредством удаленного устройства беспроводной связи с использованием указанной схемы беспроводного управления для преобразования указанных беспроводных данных о положении, управлении и команд в сигналы управления гидравлическим приводом;
вертикальный подъем указанного гидравлического привода с помощью указанного толкателя цилиндра установочного башмака для приема и передачи указанных вертикального и вращательного усилий от указанного гидравлического привода;
жесткое соединение узла опоры установочного башмака с указанным толкателем цилиндра установочного башмака, прием и передачу указанного горизонтального усилия от указанного гидравлического привода;
соединение с возможностью скольжения цилиндра поперечного перемещения установочного башмака с указанным узлом опоры установочного башмака, прием указанного горизонтального усилия и горизонтальное перемещение узла гидравлического поршня и рейки в ответ на него, причем указанный цилиндр поперечного перемещения установочного башмака обеспечивает контакт с грунтом нефтяного месторождения, перемещая указанную буровую установку; и дополнительное связывание указанного толкателя цилиндра установочного башмака и указанного цилиндра поперечного перемещения установочного башмака для обеспечения бесступенчатого управления положением указанного независимо управляемого установочного башмака.
9. Способ перемещения буровой установки по п. 8, дополнительно включающий этап точного и управляемого размещения буровой установки над целевым стволом скважины с помощью схемы управления и возможностей процессора, связанных с указанным установочным башмаком.
10. Способ перемещения буровой установки по п. 8, дополнительно включающий этап обеспечения бесступенчато регулируемого вращательного размещения указанного узла опоры установочного башмака с помощью схемы управления и возможностей процессора, связанных с указанным установочным башмаком.
11. Способ перемещения буровой установки по п. 8, дополнительно включающий этап управления указанным установочным башмаком с возможностью выбора в подчиненном режиме, чтобы все установочные башмаки работали синхронно, или в индивидуальном режиме, чтобы каждый установочный башмак работал отдельно, с помощью схемы управления и возможностей процессора, связанных с указанным установочным башмаком.
12. Способ перемещения буровой установки по п. 8, дополнительно включающий схему управления, компоненты гидравлического управления и команды процессора для управления указанным установочным башмаком для размещения буровой установки на меняющемся ландшафте нефтяного месторождения и местности с помощью схемы управления и возможностей процессора, связанных с указанным установочным башмаком.
13. Способ перемещения буровой установки по п. 8, дополнительно включающий этап генерирования точных сигналов обратной связи для сообщения о надлежащей работе каждого из указанных установочных башмаков с помощью схемы управления и возможностей процессора, связанных с указанным установочным башмаком.
14. Способ перемещения буровой установки по п. 8, дополнительно включающий нагрев гидравлической жидкости в указанном гидравлическом приводе для улучшения управления указанным гидравлическим приводом при работе указанного установочного башмака на холодном нефтяном месторождении с помощью контура подогрева гидравлической жидкости.
15. Буровая установка для использования на нефтяном месторождении или месторождении энергоресурсов, имеющая возможность перемещения на месторождении с помощью множества беспроводных команд и сигналов управления, причем указанная буровая установка содержит:
надстройку для поддержки бурового оборудования и направления указанного бурового оборудования в ствол скважины;
основание для поддержки указанной надстройки и обеспечения дополнительной структурной основы для буровой установки;
кабину оператора для обеспечения рабочего места операторам бурения во время буровых работ;
множество опорных конструкций основания для поддержки указанного основания и дополнительного обеспечения конструкции, имеющей возможность прикрепить систему перемещения буровой установки для перемещения буровой установки на нефтяном месторождении, причем указанная система перемещения буровой установки содержит: множество независимо управляемых установочных башмаков для прикрепления к буровой установке, изменяющих положение буровой установки посредством отдельных и скоординированных команд управления положением каждому из указанного множества независимо управляемых установочных башмаков, причем каждый из указанных независимо управляемых установочных башмаков дополнительно содержит: корпус, прикрепленный к буровой установке и обеспечивающий структурную оболочку для размещения гидравлического привода и схемы беспроводного управления; указанный гидравлический привод для обеспечения вертикального, горизонтального и вращательного усилий в ответ на сигналы беспроводного управления от указанной схемы беспроводного управления;
указанную схему беспроводного управления для передачи беспроводных данных о положении, управлении и команд посредством удаленного устройства беспроводной связи и преобразования беспроводных данных о положении, управлении и команд в сигналы управления гидравлическим приводом;
толкатель цилиндра установочного башмака для вертикального подъема указанного гидравлического привода, а также для приема и передачи вертикального и вращательного усилий от указанного гидравлического привода;
узел опоры установочного башмака, жестко соединенный с указанным толкателем цилиндра установочного башмака, выполненный с возможностью приема и передачи указанного горизонтального усилия от указанного гидравлического привода; цилиндр поперечного перемещения установочного башмака, соединенный с возможностью скольжения с указанным узлом опоры установочного башмака и содержащий узел гидравлического поршня и рейки для приема указанного усилия горизонтального перемещения и горизонтального перемещения в ответ на него, причем указанный цилиндр поперечного перемещения установочного башмака обеспечивает контакт с грунтом нефтяного месторождения, перемещая указанную буровую установку; и при этом дополнительно указанный толкатель цилиндра установочного башмака и указанный цилиндр поперечного перемещения установочного башмака связаны для бесступенчатого управления положением указанного независимо управляемого установочного башмака.
16. Буровая установка по п. 15, отличающаяся тем, что указанная система перемещения буровой установки дополнительно содержит схему управления и возможности процессора для точного и управляемого размещения буровой установки над целевым стволом скважины.
17. Буровая установка по п. 15, отличающаяся тем, что указанная система перемещения буровой установки дополнительно содержит схему управления, поворотный механизм и встроенные компоненты гидравлического управления для обеспечения бесступенчато регулируемого вращательного размещения указанного узла опоры установочного башмака.
18. Буровая установка по п. 15, отличающаяся тем, что система перемещения буровой установки дополнительно содержит схему управления, компоненты гидравлического управления и команды процессора для управления указанным установочным башмаком с возможностью выбора в подчиненном режиме, чтобы все установочные башмаки работали синхронно, или в индивидуальном режиме, чтобы каждый установочный башмак работал отдельно.
19. Буровая установка по п. 15, отличающаяся тем, что указанная система перемещения буровой установки дополнительно содержит схему управления, компоненты гидравлического управления и команды процессора для управления указанным установочным башмаком для размещения буровой установки на меняющемся ландшафте нефтяного месторождения и местности.
20. Буровая установка по п. 15, отличающаяся тем, что указанная система перемещения буровой установки дополнительно содержит схему управления, компоненты гидравлического управления и команды процессора для генерирования точных сигналов обратной связи для сообщения о надлежащей работе каждого из указанных установочных башмаков.
| US 3576218 A, 27.04.1971 | |||
| МОБИЛЬНАЯ БУРОВАЯ УСТАНОВКА С ТЕЛЕСКОПИЧЕСКИМИ КОРОБЧАТЫМИ МОДУЛЯМИ ПОДВЫШЕЧНОГО ОСНОВАНИЯ | 2013 |
|
RU2663850C1 |
| US 6871712 B2, 29.03.2005 | |||
| US 9091126 B2, 28.07.2015 | |||
| US 2016097238 A1, 07.04.2016. | |||

