Изобретение относится к промышленным и сельскохозяйственным тракторам, бульдозерам, погрузчикам, автогрейдерам и другим гусеничным и колесным самоходным машинам с электромеханической трансмиссией, предназначенным для выполнения землеройных, строительных, дорожных, транспортных, сельскохозяйственных и других работ.
Известна электромеханическая трансмиссия гусеничного трактора, содержащая тепловой двигатель, связанный с тяговым генератором, два тяговых электродвигателя, кинематически связанные через карданные передачи и задний мост со встроенными тормозами и конечные передачи с гусеницами противоположных бортов, и систему управления электрооборудованием. Тяговый генератор и тяговые электродвигатели выполнены синхронными, переменного тока. В системе управления электрооборудованием установлены преобразователь и микропроцессорный контроллер верхнего уровня [1].
Недостатком этой трансмиссии является ее пониженная надежность, обусловленная сложностью кинематической схемы этой трансмиссии - наличием карданных передач и заднего моста со встроенными тормозами, а также раздельным конструктивным исполнением электрических машин и систем управления ими.
Наиболее близкой к предложенной является электромеханическая трансмиссия, содержащая тепловой двигатель, тяговые устройства, электрические машины, электронные коммутаторы, силовые электрические шины, накопитель электрической энергии и блок управления. Одна электрическая машина кинематически соединена с тепловым двигателем, а прочие электрические машины кинематически соединены с тяговыми устройствами. Блок управления подключен к электронным коммутаторам, а накопитель электрической энергии - к силовым шинам. В качестве электрических машин применены реактивные индукторные машины, при этом электронные коммутаторы подключают их фазные обмотки к силовым шинам [1].
К недостатками известной трансмиссии относятся ее пониженная надежность, невысокие массогабаритные показатели, пониженная живучесть и ограниченные функциональные возможности в части реализации функций безопасности работы как самой трансмиссии, так и самоходной машины, на которой она используется.
Это обусловлено раздельным конструктивным исполнением электрических машин, электронного коммутатора и блока управления, а также централизацией управления трансмиссией. Наличие на самоходной машине достаточно большого количества электронных блоков, межблочных соединений, а также соединений между электронными блоками и электрическими машинами, ухудшает массогабаритные показатели трансмиссии и снижает ее надежность. В известной трансмиссии, в силу использования принципа централизованного управления, отказ блока управления приводит к нарушению всех функций трансмиссии, к возможной неконтролируемой работе электрических машин и, соответственно, к опасным перемещениям машины.
Задачей, решаемой изобретением, является создание электромеханической трансмиссии самоходной машины, в которой одновременно обеспечивается повышение надежности работы, улучшение массогабаритных показателей, повышение живучести и расширение функциональных возможностей в части реализации функций безопасности работы как самой трансмиссии, так и самоходной машины, на которой она установлена.
Эти технические результаты достигаются за счет того, что электромеханическая трансмиссия самоходной машины содержит генераторный мехатронный модуль, функционально соединенный с двигателем внутреннего сгорания (ДВС) и обеспечивающий преобразование механической энергии ДВС в электрическую энергию, тяговые мехатронные модули, соединенные силовыми шинами с генераторным мехатронным модулем и приспособленные для преобразования электрической энергии в механическую с возможностью раздельного привода каждого ведущего колеса или гусеницы левого и правого борта самоходной машины, а также панель оператора и органы управления трансмиссией, причем тяговые мехатронные модули, панель оператора и органы управления трансмиссией соединены между собой шиной последовательной цифровой передачи данных.
Кроме того, с целью достижения указанных технических результатов, в частных случаях реализации электромеханической трансмиссии самоходной машины:
а) тяговые мехатронные модули приспособлены для размещения внутри обвода гусениц или в ступицах колес самоходной машины;
б) генераторный мехатронный модуль содержит вентильно-индукторный генератор с независимым возбуждением, силовой выпрямитель напряжения на его рабочих обмотках, подключенный к выходным силовым шинам, и электронный регулятор с силовым ключом, приспособленным для подключения выходного напряжения силового выпрямителя к обмотке возбуждения и широтно-импульсного регулирования тока в ней из условия поддержания заданного выходного напряжения генераторного мехатронного модуля. Электронный регулятор выполнен, в частности, на основе микропроцессорного контроллера (микроконтроллера) и имеет интерфейс шины последовательной цифровой передачи данных;
в) генераторный мехатронный модуль содержит вентильно-индукторный генератор с самовозбуждением или синхронный генератор с постоянными магнитами на роторе, соединенный с силовым преобразователем и работающий под управлением микропроцессорного контроллера, а также датчик положения вала или ротора генератора, соединенный с микропроцессорным контроллером, и устройство сопряжения с шиной последовательной цифровой передачи данных, встроенное в микропроцессорный контроллер или подключенное к нему;
г) генераторный мехатронный модуль выполнен обратимым с возможность торможения самоходной машины двигателем внутреннего сгорания и/или запуска двигателя внутреннего сгорания от внешней электрической сети, подключаемой с использованием электрического кабеля;
д) генераторный мехатронный модуль дополнительно содержит встроенный мультипликатор;
е) генераторный мехатронный модуль содержит тормозной резистор и электронный ключ, осуществляющий подключение тормозного резистора к выходным шинам генераторного мехатронного модуля под управлением электронного регулятора или микропроцессорного контроллера в зависимости от напряжения на выходных шинах генераторного мехатронного модуля и/или сигналов управления, поступающих с шины последовательной цифровой передачи данных. Тормозной резистор и генератор размещены в общем корпусе генераторного мехатронного модуля и имеют общую систему жидкостного охлаждения;
ж) тяговый мехатронный модуль содержит электрический двигатель, микропроцессорный контроллер, силовой преобразователь, соединенный с обмотками электрического двигателя, силовыми шинами питания и микропроцессорным контроллером, датчик положения вала или ротора электрического двигателя, соединенный с микропроцессорным контроллером, а также устройство сопряжения с шиной последовательной цифровой передачи данных, встроенное в микропроцессорный контроллер или подключенное к нему. При этом электрический двигатель выполнен вентильно-индукторным с пассивным ферромагнитным ротором, синхронным с постоянными магнитами на роторе или асинхронным;
з) тяговый мехатронный модуль дополнительно содержит встроенный электромагнитный тормоз, управляемый от микропроцессорного контроллера с помощью электронного ключа силового преобразователя в зависимости от сигнала, поступающего по шине последовательной цифровой передачи данных, или включаемый автоматически непосредственно после остановки вала электрического двигателя или через установленный интервал времени после этой остановки;
и) тяговый мехатронный модуль дополнительно содержит тормозной резистор и электронный ключ, осуществляющий подключение этого тормозного резистора к шинам питания тягового мехатронного модуля под управлением микропроцессорного контроллера в зависимости от напряжения на шинах питания тягового мехатронного модуля и/или сигналов управления тормозным резистором, поступающих по шине последовательной цифровой передачи данных. Тормозной резистор и электрический двигатель, а также электромагнитный тормоз (при его наличии) размещены в общем корпусе тягового мехатронного модуля и имеют общую систему жидкостного охлаждения;
к) тяговый мехатронный модуль дополнительно содержит встроенную зубчатую передачу, например, бортовой редуктор, приспособленный для привода колеса или гусеницы самоходной машины;
л) генераторный и тяговые мехатронные модули имеют общую систему жидкостного охлаждения, объединенную с системой охлаждения ДВС;
м) шина последовательной цифровой передачи данных выполнена с физическим уровнем промышленной сети Controller Area Network, сокращенно CAN, определенным в стандарте ISO 11898, и протокола высокого уровня CANopen, или DeviceNet, или CAN Kingdom, или J1939;
н) электромеханическая трансмиссия дополнительно содержит накопитель электрической энергии, подключенный к силовыми шинам и выполненный в виде батареи аккумуляторов и/или суперконденсаторов;
о) электромеханическая трансмиссия дополнительно содержит контроллер двигателя внутреннего сгорания и/или контроллер трансмиссии, соединенный с шиной последовательной цифровой передачи данных;
п) тяговый мехатронный модуль содержит блок микромеханических акселерометров и/или гироскопов, подключенный к микропроцессорному контроллеру, который приспособлен для определения параметров движения самоходной машины и последующего управления электрическим двигателем из условия ограничения какого-либо параметра движения машины и/или реализации какой-либо функции этого движения, причем максимально допустимое значение этого параметра и/или функция движения предварительно записаны в память микропроцессорного контроллера и/или получены с шины последовательной цифровой передачи данных. В частности, осуществляется ограничение буксования ведущего колеса или гусеницы; ограничение радиуса поворота самоходной машины в зависимости от скорости этого колеса или гусеницы; ограничение максимальной скорости ведущего колеса или гусеницы, стабилизация скорости борта самоходной машины с учетом буксования ведущего колеса или гусеницы; ограничение максимального линейного или углового ускорения этого борта; поддержание скорости движения самоходной машины, установленной в зависимости от величины вертикального ускорения, воздействующего на тяговый мехатронный модуль или стабилизация его тяговой мощности;
р) в память микропроцессорного контроллера тягового мехатронного модуля предварительно записана программа его автономной работы, а микропроцессорный контроллер приспособлен для автоматического запуска этой программы и управления электрическим двигателем по этой программе при выявлении отсутствия сигнала управления или ошибок в сигнале управления этим тяговым мехатронным модулем в шине последовательной цифровой передачи данных. В частности, микропроцессорный контроллер, работая в автономном режиме, управляет электрическим двигателем из условия поддержания прямолинейного движения самоходной машины;
с) микропроцессорные контроллеры генераторного и тяговых мехатронных модулей осуществляют обмен данными о текущих величинах их мощности и далее реализуют управление электрическим генератором и электрическими двигателями из условия приведения в соответствие выходной мощности генераторного мехатронного модуля и суммарной мощности, потребляемой тяговыми мехатронными модулями, и/или поддержания предварительно установленного распределения тягового усилия между колесами передней и задней оси, и/или предотвращения паразитной циркуляции мощности, обусловленной различием длины пути каждого колеса или гусеницы при повороте самоходной машины;
т) панель оператора содержит графические, символьные и/или электромеханические устройства отображения информации о параметрах и режимах работы трансмиссии, рабочего оборудования и/или ДВС, звуковые и/или световые сигнализаторы их предельных состояний и органы управления панелью оператора, и/или трансмиссией, и/или рабочим оборудованием, и/или двигателем самоходной машины, соединенные с микропроцессорным контроллером панели оператора, содержащим блок энергонезависимой памяти, приспособленный для записи в него параметров работы трансмиссии, и/или рабочего оборудования, и/или ДВС, с возможностью считывания в случае необходимости, а также устройство сопряжения с шиной последовательной цифровой передачи данных;
у) электромеханическая трансмиссия дополнительно содержит датчики параметров работы трансмиссии, рабочего оборудования и/или ДВС, подключенные к шине последовательной цифровой передачи данных, и/или контроллеру трансмиссии, и/или панели оператора, и/или генераторному мехатронному модулю, и/или тяговым мехатронным модулям;
ф) органы управления трансмиссией выполнены в виде джойстиков или аппаратов управления скоростью и направлением движения самоходной машины.
Реализация указанных признаков независимого и зависимых пунктов формулы изобретения приводит к созданию электромеханической трансмиссии самоходной машины на основе интеллектуальных мехатронных модулей в виде распределенной системы с прямым цифровым управлением ее отдельных устройств.
В этой трансмиссии реализовано не только непосредственное цифровое управление от микроконтроллера ключами силового преобразователя генератора и электрических двигателей, но и обеспечен цифровой обмен информацией между мехатронными модулями, реализована возможность прямого ввода в микроконтроллеры сигналов обратных связей, в том числе формируемых встроенными датчиками, с их последующей программно-аппаратной обработкой микроконтроллерами.
Децентрализованное (распределенное) управление трансмиссией предусматривает распределение функций управления по отдельным устройствам трансмиссии, при котором для выработки воздействия на элементы каждого устройства необходима информация о состоянии только этого устройства и реализуемой им функции. Трансмиссия фактически представляет собой совокупность объединенных цифровой линией связи автономно работающих устройств - мехатронных модулей, органов управления, панели оператора и т.д., каждое из которых обладает собственной информационной, алгоритмической и технической базой.
Объединение множества механических и электронных устройств трансмиссии, в том числе редукторов и тормозов, в интеллектуальные мехатронные модули обеспечивает повышение надежности и улучшение массогабаритных показателей трансмиссии за счет сокращения количества и длины внешних механических и электрических связей между отдельными устройствами трансмиссии, сокращения количества их оболочек (корпусов), реализации общей системы жидкостного охлаждения и т.д.
Реализация трансмиссии в виде функционально распределенной системы без использования центрального (главного) управляющего контроллера обеспечивает достижение повышенных показателей общей живучести и безопасности работы как трансмиссии, так и самоходной машины, на которой она установлена, поскольку отказ одного устройства приводит к потере лишь ограниченного числа функций трансмиссии, а наличие параллельных и дублирующих каналов управления, обусловленное применением микроконтроллеров в каждом их этих устройств, обеспечивает сохранение наиболее ответственных функций трансмиссии при частичных или полных отказах ее отдельных устройств.
Например, отказ панели оператора не оказывает влияния на работу тяговых мехатронных модулей и не нарушает управление движением самоходной машины. В случае отсутствия сигналов управления одним из тяговых мехатронных модулей, например, по причине обрыва шины CAN, а также при наличии ошибок (сбоев) в этой линии связи, мехатронный тяговый модуль переходит на работу в автономном режиме, оценивая параметры работы трансмиссии и самоходной машины с помощью встроенных датчиков, например, блока акселерометров и гироскопов, и реализуя наиболее безопасные режимы работы трансмиссии и самоходной машины.
Дополнительно причинно-следственные связи между признаками предложенного изобретения и достигаемыми техническими результатами показаны при описании примеров реализации предложенной электромеханической трансмиссии.
На чертеже представлена упрощенная схема электромеханической трансмиссии самоходной машины.
Она содержит генераторный мехатронный модуль 1, механически соединенный с двигателем внутреннего сгорания (ДВС) 2, тяговые мехатронные модули 3, 4 (по числу ведущих колес или гусениц 5, 6 самоходной машины), соединенные силовыми шинами 7 с генераторным мехатронным модулем 1, а также панель оператора 8 и органы управления 9 трансмиссией.
Мехатронные модули 1, 3, 4, панель оператора 8, орган управления трансмиссией 9 и другие указанные далее устройства трансмиссии, содержащие микропроцессорные контроллеры (микроконтроллеры), соединены между собой шиной последовательной цифровой передачи данных, выполненной, в частности, с физическим уровнем промышленной сети CAN (Controller Area Network), определенным в стандарте ISO 11898, и протокола высокого уровня CANopen, или DeviceNet, или CAN Kingdom, или J1939. Возможно также применение интерфейса цифровой передачи данных LIN (Local Interconnect Network - интерфейс для автомобильных систем), Л 850 (SAE), CarLink, VAN, A-bus, RS-232C (СОМ - порт), RS-485 (Recommended Standard 485), «токовая петля», MIDI, MicroLAN, Ethernet, USB и т.д.
Панель оператора 8 выполнена на основе микроконтроллера и содержит графические, символьные и/или электромеханические (стрелочные) устройства отображения информации о параметрах и режимах работы трансмиссии, рабочего оборудования и/или ДВС, а также звуковые и/или световые сигнализаторы их предельных состояний. На панели оператора 8 могут быть установлены органы управления этой панелью, использующиеся, например, для переключения отображаемых параметров, а также отдельные (вспомогательные, сервисные, дублирующие) органы управления трансмиссией, рабочим оборудованием и/или ДВС, выполненные, например, в виде бесконтактных или квазисенсорных клавиш и кнопок.
Микроконтроллер панели оператора 8 в общем случае содержит блок энергонезависимой памяти (блок памяти регистратора параметров), приспособленный для записи в него параметров работы трансмиссии, рабочего оборудования и/или ДВС, с возможностью считывания записанной информации путем ее вывода на графическое устройство отображения информации (графическую панель) или перезаписи на мобильный носитель информации, приспособленный для подключения к персональному компьютеру с целью последующей обработки и анализа этой информации.
Каждый из органов управления 9 выполнен в виде джойстика, аппарата управления, пульта или переключателя и предназначен для формирования сигналов управления скоростью и/или направлением движения самоходной машины. Он содержит, например, механический приводной элемент (рукоятку, рычаг), датчик положения этого элемента и микроконтроллер, осуществляющий обработку выходных сигналов этого датчика. В частности, орган управления 9 может быть выполнен в виде джойстика с магниточувствительным датчиком положения его рукоятки, соединенным с микроконтроллером, который формирует сигналы управления движением машины вперед/назад и поворота влево/вправо при отклонении оператором рукоятки джойстика соответственно вперед/назад и влево/вправо.
Тяговые мехатронные модули 3, 4, предпочтительно, имеют конструктивное исполнение и массогабаритные параметры, позволяющие их разместить внутри обвода гусениц или в ступицах колес 5, 6 самоходной машины.
Электромеханическая трансмиссия в данном примере ее реализации содержит также контроллер ДВС 10, накопитель электрической энергии 11, выполненный в виде батареи аккумуляторов и/или суперконденсаторов, и тормозной резистор 12, подключенные к силовыми шинам 7, а также контроллер трансмиссии 13 (может отсутствовать) и датчики 14 параметров работы трансмиссии, рабочего оборудования и ДВС.
Тормозной резистор 12 может быть встроен в любой из мехатронных модулей 1, 3, 4 или выполнен в виде автономного блока (показано на чертеже). Он содержит силовой резистор (резистивный элемент), предназначенный для поглощения энергии торможения самоходной машины, и электронный ключ, осуществляющий подключение этого резистора к силовым шинам 7 в зависимости от напряжения на этих шинах. Управление электронным ключом может осуществляться также от микроконтроллера в зависимости от сигналов управления тормозным резистором, поступающих с шины CAN. Если тормозной резистор 12 встроен в мехатронных модуль 1, 3, 4, то управление этим резистором осуществляется от микроконтроллера мехатронного модуля через соответствующий электронный ключ силового преобразователя.
Контроллер ДВС 10, контроллер трансмиссии 13 и датчики 14, в случае необходимости, имеют устройства сопряжения с шиной CAN.
В качестве датчиков 14 могут использоваться датчики продольного и поперечного наклона самоходной машины, температуры окружающей среды, температуры охлаждающей жидкости, скорости движения или величины перемещения рабочих органов, например, положения отвала бульдозера, датчик наличия оператора в кресле или в кабине самоходной машины, используемый для блокирования работы трансмиссии при отсутствии оператора, и другие датчики, необходимость установки которых определяется особенностями конструкции самоходной машины и технологического процесса, для выполнения которого она предназначена. Датчики 14 могут быть подключены к контроллеру трансмиссии 13, панели оператора 8, органам управления 9, контроллеру 10 ДВС или к мехатронным модулям 1, 3, 4.
Генераторный и тяговые мехатронные модули 1, 3, 4 и тормозной резистор 12 имеют общую систему жидкостного охлаждения 15 (на чертеже условно показаны трубопроводы с теплоносителем), объединенную с системой охлаждения ДВС 2.
Генераторный мехатронный модуль 1 содержит вентильно-индукторный генератор с независимым возбуждением 16, силовой выпрямитель (силовой преобразователь переменного напряжения в постоянное) 17 и электронный регулятор с силовым ключом, приспособленным для подключения выходного напряжения силового выпрямителя к обмотке возбуждения (на чертеже условно не показана) и широтно-импульсного регулирования тока в ней из условия поддержания заданного выходного напряжения генераторного мехатронного модуля 1. Электронный регулятор может быть выполнен на основе микроконтроллера 18 и оснащен устройством сопряжения с шиной CAN.
Генератор 16 может быть также вентильно-индукторным с самовозбуждением или синхронным с постоянными магнитами на роторе. В этом случае микропроцессорный контроллер 18 управляет силовым преобразователем (коммутатором) 17, реализованном на силовых IGBT транзисторах, с использованием датчика 19 положения вала или ротора генератора.
Генераторный мехатронный модуль 1 может содержать встроенный мультипликатор (повышающий редуктор), благодаря которому работа этого мехатронного модуля осуществляется на более высоких скоростях вращения ротора, что приводит к улучшению его массогабаритных показателей.
Генераторный мехатронный модуль может 1 быть выполнен обратимым - с возможностью его работы в качестве тягового модуля. Благодаря этому обеспечивается возможность торможения самоходной машины двигателем внутреннего сгорания (ДВС) 2, а также запуска ДВС от внешней электрической сети, подключаемой с использованием электрического кабеля (на чертеже условно не показан).
Каждый из тяговых мехатронных модулей 3, 4 содержит электрический двигатель (электромотор) 20, 21, микропроцессорный контроллер, предпочтительно, цифровой сигнальный процессор 22, 23, силовой преобразователь 24, 25, соединенный с обмотками электрического двигателя 20, 21, силовыми шинами питания 7 и микропроцессорным контроллером 22, 23 и датчик положения вала или ротора 26, 27 электрического двигателя, а также устройство сопряжения с шиной CAN, встроенное в микропроцессорный контроллер или подключенное к нему,
Электрический двигатель 20, 21 может быть вентильно-индукторным (вентильным индукторно-реактивным) с пассивным ферромагнитным ротором (без постоянных магнитов и обмоток на роторе), именуемым в зарубежной технической литературе как «Switched Reluctance Motor» (SRM), синхронным с постоянными магнитами на роторе, именуемым в зарубежной технической литературе как «Permanent Magnet Synchronous Motor» (PMSM) (реже используется название «BrushLess Direct Current motor» (BLDC), что переводится, как «Бесщеточный мотор постоянного тока»), или асинхронным.
Тяговый мехатронный модуль может содержать встроенный электромагнитный тормоз 28, 29. В этом случае силовой преобразователь 24, 25 содержит электронный ключ, соединенный с микроконтроллером 22, 23 и обеспечивающий управление включением/отключением этого тормоза в зависимости от сигнала, поступающего по шине CAN. Возможна также реализация микроконтроллером 22, 23 алгоритма автоматического включения этого электромагнитного тормоза непосредственно после остановки вала электрического двигателя 20, 21 или через установленный интервал времени после этой остановки (по сигналам датчика 26, 27).
Дополнительно тяговый мехатронный модуль 3, 4 может содержать встроенную зубчатую передачу, например, планетарный бортовой редуктор 30, 31, обеспечивающий привод колеса или гусеницы 5, 6 самоходной машины непосредственно от тягового мехатронного модуля без использования дополнительных передач.
Бортовые редукторы 30, 31 могут выполнены обратимыми с возможностью приведения во вращение ротора электрической машины (электромотора) 20, 21 при замедлении, буксировке машины или при ее движении под уклон. В этом случае электрические машины 20, 21 работают в режиме генераторов, обеспечивая возможность рекуперации энергии - заряда накопителя энергии 11, а также торможения самоходной машины.
Тяговый мехатронный модуль 3, 4 может содержать датчики параметров работы самого тягового мехатронного модуля и самоходной машины, на которой он установлен. В нем кроме датчика положения ротора 27, 27 могут быть установлены датчики температуры обмоток электрических двигателей 20, 21 и охлаждающей жидкости 15, датчики тока в обмотках электрических двигателей 20, 21, блок микромеханических акселерометров и гироскопов и т.д., подключенные к микропроцессорному контроллеру 22, 23.
Электромеханическая трансмиссия работает следующим образом.
ДВС 2 непосредственно или через повышающий редуктор (мультипликатор) приводит во вращение вал (ротор) генератора 16 генераторного мехатронного модуля 1. Силовой преобразователь 17, реализованный с использованием диодов или силовых IGBT транзисторов, управляемых микроконтроллером 18 с использованием сигналов датчика 19 положения ротора генератора 16, выполняет функции выпрямителя. Если генератор 16 выполнен вентильно-индукторным с независимым возбуждением, то с помощью силового преобразователя 17 и микроконтроллера 18, либо электронного регулятора и силового ключа, осуществляется регулирование тока возбуждения генератора 16.
Напряжение постоянного тока, например 550 В, с выхода генераторного мехатронного модуля 1 по силовым шинам 7 поступает на тяговые мехатронные модули 3, 4, накопитель энергии 11 и управляемый тормозной резистор 12 (для реализации режима торможения самоходной машины).
Электрические двигатели 20, 21, получающие электрическую энергию от силовых преобразователей 24, 25, преобразуют ее в механическую энергию и передают вращающий момент на бортовые редукторы 30, 31 и далее на ведущие колеса или звездочки 5, 6, обеспечивая движение самоходной машины.
Режимы работы генераторного 1 и тяговых 3, 4 мехатронных модулей устанавливаются в зависимости от информационных сигналов, присутствующих в шине последовательной цифровой передачи данных CAN, либо самостоятельно микроконтроллерами этих мехатронных модулей.
Во время работы самоходной машины скорость ее движения устанавливается органами управления 9. Если мощности ДВС 2 достаточно для поддержания этой скорости при текущем значении тяговой нагрузки самоходной машины, то самоходная машина движется с заданной скоростью.
При увеличении тяговой нагрузки самоходной машины возрастает необходимый крутящий момент электрических двигателей 20, 21. Если этот момент не может быть реализован при заданной скорости вращения их роторов, то микроконтроллеры 22, 23 осуществляют управление силовыми преобразователями 24, 25 из условия снижения скорости вращения роторов электродвигателей при одновременном повышении их крутящего момента.
При уменьшении тягового усилия самоходной машины микроконтроллеры 23, 24 автоматически увеличивают скорость вращения роторов электродвигателей 20, 21 и, соответственно, скорость движения самоходный машины возрастает до величины, заданной оператором с помощью органов управления 9.
Таким образом, электромеханическая трансмиссия обеспечивает автоматическое регулирования тягового усилия и скорости движения самоходной машины при полном использовании мощности ДВС 1.
Для реализации поворота тяговые мехатронные модули 3, 4 (их микроконтроллеры 22, 23) после получения информации о величине радиуса поворота с шины CAN, устанавливают различные угловые скорости вращения роторов электродвигателей 20, 21, обеспечивая поворот самоходной машины.
Одновременно микропроцессорные контроллеры 18, 22, 23 генераторного 1 и тяговых 3, 4 мехатронных модулей обмениваются данными о текущих величинах их мощностей по шине CAN и далее управляют силовыми преобразователями 17, 24, 25 из условия приведения в соответствие выходной мощности генераторного мехатронного модуля 1 и суммарной мощности, потребляемой тяговыми мехатронными модулями 3, 4, а также из условия поддержания предварительно установленного распределения тягового усилия между колесами передней и задней оси, либо из условия предотвращения паразитной циркуляции мощности, обусловленной различием длины пути каждого колеса или гусеницы при повороте самоходной машины.
В процессе своей работы микроконтроллеры 22, 23 тяговых мехатронных модулей 3, 4 с помощью встроенных датчиков контролируют как параметры работы самих мехатронных модулей, так и параметры движения самоходной машины, на которой они установлены. Для этого, в частности, используется навигационный блок из трехосевого микромеханического акселерометра и трехосевого гироскопа. Далее микроконтроллеры 22, 23 реализуют управление электрическими двигателями 20, 21 из условия ограничения установленных параметров или функций движения самоходной машины. При этом максимально допустимые значения этих параметров и указанные функциональные зависимости предварительно определены в зависимости от конструкции самоходной машины и записаны в память микропроцессорных контроллеров 22, 23, либо передаются в тяговые мехатронные модули 3, 4 по шине CAN.
В частности, микропроцессорные контроллеры могут осуществлять ограничение буксования каждого ведущего колеса или гусеницы самоходной машины, реализацию радиуса поворота самоходной машины в зависимости от скорости этого колеса или гусеницы, либо ограничение максимальной скорости ведущего колеса или гусеницы. Возможна также реализация алгоритмов автоматической стабилизации скорости борта самоходной машины с учетом буксования ведущего колеса или гусеницы, алгоритмов ограничения максимального линейного или углового ускорения этого борта, поддержания скорости движения самоходной машины, установленной в зависимости от величины вертикального ускорения, воздействующего на тяговый мехатронный модуль, либо стабилизации его тяговой мощности.
В случае отказа органов управления 9 управление тяговыми мехатронными модулями 3, 4 осуществляется от дублирующих органов управления, расположенных на панели оператора 8.
В память микропроцессорных контроллеров 18, 22, 23 генераторного 1 и тяговых 3, 4 мехатронного модуля предварительно записаны также программы их автономной работы. Если в процессе движения самоходной машины на какой-либо микропроцессорный контроллер перестали поступать сигналы управления с шины CAN, либо возникли ошибки в этих сигналах, то микропроцессорный контроллер автоматически переходит к выполнению программы автономной работы.
При этом, благодаря наличию встроенных датчиков, обеспечивается максимальная безопасность самоходной машины. Например, если во время движения самоходной машины произошло отключение сигналов управления тягового мехатронного модуля одного из бортов, то его микропроцессорный контроллер переходит в режим управления электрическим двигателем из условия поддержания прямолинейного движения самоходной машины, контролируя при помощи гироскопа направление движения самоходной машины. В этом случае скорость работоспособного борта самоходной машины будет снижаться по сигналам органа управления 9, а тяговый мехатронный модуль борта с отсутствующим сигналом управления автоматически снизит свою скорость, копируя движение противоположного борта.
В режиме торможения тяговые мехатронные модули 3, 4 переходят в генераторный режим, передавая энергию в накопитель энергии 11, осуществляя торможение самоходной машины. Избыток энергии поглощается тормозным резистором 12.
Для специалистов в данной области техники понятно, что кроме описанных вариантов электромеханической трансмиссии самоходной машины возможны также иные варианты ее реализации на основе признаков, изложенных в формуле изобретения.
Изобретение относится к тракторам, бульдозерам, погрузчикам и другим самоходным машинам. Электромеханическая трансмиссия самоходной машины содержит генераторный мехатронный модуль, соединенный с двигателем внутреннего сгорания для преобразования механической энергии двигателя в электрическую энергию. Также трансмиссия содержит тяговые мехатронные модули, число которых равно числу ведущих колес или гусениц самоходной машины, соединенные силовыми шинами с генераторным мехатронным модулем и приспособленные для преобразования электрической энергии в механическую с возможностью привода колес или гусениц левого и правого борта самоходной машины. Тяговые мехатронные модули, панель оператора и орган управления трансмиссией соединены между собой шиной последовательной цифровой передачи данных. Достигается повышение надежности работы. 8 з.п. ф-лы, 1 ил.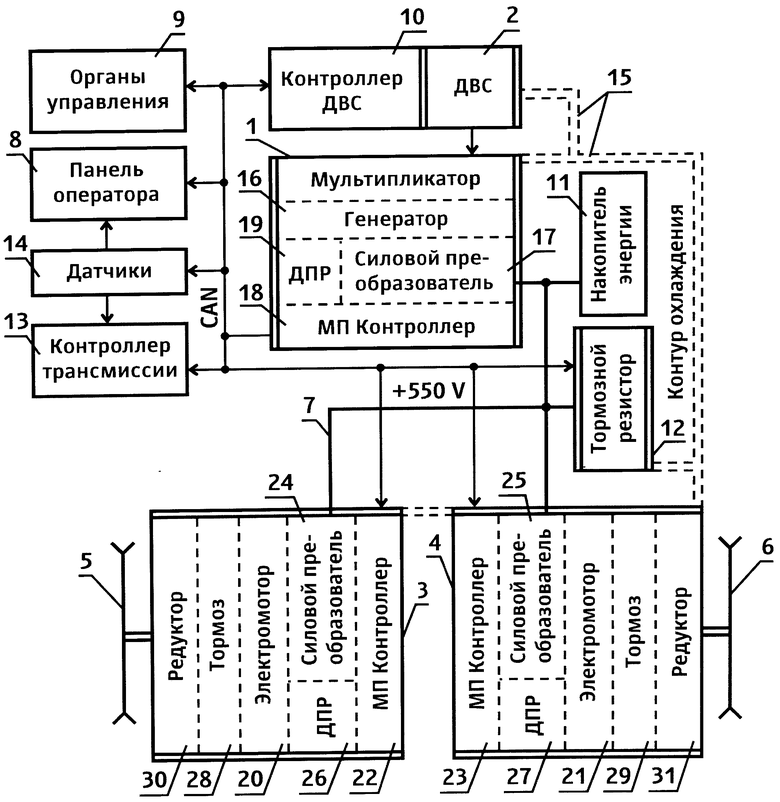
1. Электромеханическая трансмиссия самоходной машины, содержащая генераторный мехатронный модуль, функционально соединенный с двигателем внутреннего сгорания и выполненный с возможностью преобразования по меньшей мере части механической энергии двигателя внутреннего сгорания в электрическую энергию, тяговые мехатронные модули, число которых равно числу ведущих колес или гусениц самоходной машины, соединенные силовыми шинами с генераторным мехатронным модулем и приспособленные для преобразования электрической энергии в механическую с возможностью привода колес или гусениц левого и правого борта самоходной машины, панель оператора и по меньшей мере один орган управления трансмиссией, причем тяговые мехатронные модули, панель оператора и орган управления трансмиссией соединены между собой шиной последовательной цифровой передачи данных, отличающаяся тем, что в ней реализовано по меньшей мере одно из следующих технических решений:
а) генераторный мехатронный модуль содержит вентильно-индукторный генератор с независимым возбуждением или с самовозбуждением, или синхронный генератор с постоянными магнитами на роторе, силовой выпрямитель или силовой преобразователь, соединенный с рабочими обмотками генератора и с выходными шинами генераторного мехатронного модуля, а также электронный регулятор с силовым ключом, приспособленным для подключения выходного напряжения силового выпрямителя к обмотке возбуждения, или микропроцессорный контроллер, датчик положения вала или ротора генератора и устройство сопряжения с шиной последовательной цифровой передачи данных, встроенное в микропроцессорный контроллер или подключенное к нему, при этом силовой преобразователь соединен с микропроцессорным контроллером, к которому подключен датчик положения вала или ротора генератора;
б) генераторный мехатронный модуль выполнен обратимым с возможностью реализации торможения самоходной машины двигателем внутреннего сгорания и/или запуска двигателя внутреннего сгорания от внешней электрической сети, подключаемой с использованием электрического кабеля;
в) генераторный мехатронный модуль содержит встроенный мультипликатор;
г) генераторный мехатронный модуль содержит тормозной резистор, электронный регулятор или микропроцессорный контроллер и электронный ключ, приспособленный для подключения тормозного резистора к выходным шинам генераторного мехатронного модуля, причем электронный регулятор или микропроцессорный контроллер выполнен с возможностью управления электронным ключом в зависимости от напряжения на выходных шинах генераторного мехатронного модуля и/или сигналов управления тормозным резистором, поступающих с шины последовательной цифровой передачи данных;
д) тяговый мехатронный модуль содержит электрический двигатель, микропроцессорный контроллер, силовой преобразователь, соединенный с обмотками электрического двигателя, силовыми шинами питания и микропроцессорным контроллером, датчик положения вала или ротора электрического двигателя, соединенный с микропроцессорным контроллером, а также устройство сопряжения с шиной последовательной цифровой передачи данных, встроенное в микропроцессорный контроллер или подключенное к нему, причем электрический двигатель выполнен вентильно-индукторным с пассивным ферромагнитным ротором, или синхронным с постоянными магнитами на роторе, или асинхронным;
е) тяговый мехатронный модуль содержит встроенный электромагнитный тормоз, электронный ключ и микропроцессорный контроллер, соединенный с электронным ключом и приспособленный для управления электронным ключом и соединенным с ним электромагнитным тормозом в зависимости от сигнала, поступающего по шине последовательной цифровой передачи данных, и/или для автоматического включения электромагнитного тормоза непосредственно после остановки вала электрического двигателя или через установленный интервал времени после этой остановки;
ж) тяговый мехатронный модуль содержит тормозной резистор, электронный ключ, приспособленный для подключения тормозного резистора к шинам питания тягового мехатронного модуля, и микропроцессорный контроллер, выполненный с возможностью управления электронным ключом в зависимости от напряжения на шинах питания тягового мехатронного модуля и/или сигналов управления тормозным резистором, поступающих по шине последовательной цифровой передачи данных;
з) тяговый мехатронный модуль содержит электрический двигатель, а также электромагнитный тормоз и/или тормозной резистор, которые размещены в общем корпусе тягового мехатронного модуля и имеют общую систему жидкостного охлаждения;
и) тяговый мехатронный модуль содержит встроенную зубчатую передачу или бортовой редуктор, приспособленный для привода колеса или гусеницы самоходной машины;
к) генераторный и тяговые мехатронные модули имеют общую систему жидкостного охлаждения;
л) шина последовательной цифровой передачи данных выполнена с физическим уровнем промышленной сети Controller Area Network (CAN), определенным в стандарте ISO 11898, и протокола высокого уровня CANopen, или DeviceNet, или CAN Kingdom, или J1939;
м) тяговый мехатронный модуль содержит микропроцессорный контроллер и по меньшей мере один микромеханический акселерометр и/или гироскоп, подключенный к микропроцессорному контроллеру, который приспособлен для определения параметров движения самоходной машины и последующего управления электрическим двигателем из условия ограничения по меньшей мере одного параметра движения машины и/или реализации по меньшей мере одной функции этого движения;
н) генераторный и тяговые мехатронные модули содержат микропроцессорные контроллеры, которые приспособлены для обмена данными о текущих величинах их мощности, а также для управления электрическим генератором и электрическими двигателями из условия приведения в соответствие выходной мощности генераторного мехатронного модуля и суммарной мощности, потребляемой тяговыми мехатронными модулями, и/или поддержания предварительно установленного распределения тягового усилия между колесами передней и задней оси, и/или из условия предотвращения паразитной циркуляции мощности, обусловленной различием длины пути каждого колеса или гусеницы при повороте самоходной машины;
о) панель оператора содержит графические, и/или символьные, и/или электромеханические устройства отображения информации о параметрах и режимах работы трансмиссии, и/или рабочего оборудования, и/или двигателя внутреннего сгорания самоходной машины, звуковые и/или световые сигнализаторы их предельных состояний и органы управления панелью оператора, и/или трансмиссией, и/или рабочим оборудованием, и/или двигателем внутреннего сгорания самоходной машины, соединенные с микропроцессорным контроллером панели оператора, содержащим блок энергонезависимой памяти, приспособленный для записи в него параметров работы трансмиссии, и/или рабочего оборудования, и/или двигателя внутреннего сгорания самоходной машины, с возможностью считывания в случае необходимости, а также устройство сопряжения с шиной последовательной цифровой передачи данных;
п) электромеханическая трансмиссия дополнительно содержит датчики параметров работы трансмиссии, и/или рабочего оборудования, и/или двигателя внутреннего сгорания самоходной машины, подключенные к шине последовательной цифровой передачи данных, и/или контроллеру трансмиссии, и/или панели оператора, и/или генераторному мехатронному модулю, и/или к органам управления, и/или контроллеру двигателя внутреннего сгорания, и/или тяговым мехатронным модулям.
2. Электромеханическая трансмиссия по п. 1, отличающаяся тем, что тяговые мехатронные модули приспособлены для размещения внутри обвода гусениц или в ступицах колес самоходной машины.
3. Электромеханическая трансмиссия по п. 1, отличающаяся тем, что электронный регулятор генераторного мехатронного модуля выполнен на основе микроконтроллера и приспособлен для подключения к шине последовательной цифровой передачи данных.
4. Электромеханическая трансмиссия по п. 1, отличающаяся тем, что она дополнительно содержит накопитель электрической энергии, который выполнен в виде батареи аккумуляторов и/или суперконденсаторов и подключен к силовыми шинам.
5. Электромеханическая трансмиссия по п. 1, отличающаяся тем, что она дополнительно содержит контроллер двигателя внутреннего сгорания и/или контроллер трансмиссии, соединенный с шиной последовательной цифровой передачи данных.
6. Электромеханическая трансмиссия по п. 1, отличающаяся тем, что микропроцессорный контроллер тягового мехатронного модуля приспособлен для реализации ограничения буксования ведущего колеса или гусеницы самоходной машины, и/или ограничения радиуса поворота самоходной машины в зависимости от скорости этого колеса или гусеницы, и/или ограничения максимальной скорости ведущего колеса или гусеницы, и/или стабилизации скорости борта самоходной машины с учетом буксования ведущего колеса или гусеницы, и/или ограничения максимального линейного или углового ускорения этого борта, и/или поддержания скорости движения самоходной машины, установленной в зависимости от величины вертикального ускорения, воздействующего на тяговый мехатронный модуль, и/или стабилизации его тяговой мощности.
7. Электромеханическая трансмиссия по п. 1, отличающаяся тем, что в память микропроцессорного контроллера тягового мехатронного модуля предварительно записана программа его автономной работы, а микропроцессорный контроллер приспособлен для автоматического запуска этой программы при выявлении отсутствия сигнала управления или ошибок в сигнале управления этим тяговым мехатронным модулем в шине последовательной цифровой передачи данных.
8. Электромеханическая трансмиссия по п. 7, отличающаяся тем, что микропроцессорный контроллер тягового мехатронного модуля при выявлении отсутствия сигнала управления или ошибок в сигнале управления тяговым мехатронным модулем выполнен с возможностью управления электрическим двигателем тягового мехатронного модуля из условия поддержания прямолинейного движения самоходной машины.
9. Электромеханическая трансмиссия по п. 1, отличающаяся тем, что органы управления трансмиссией выполнены в виде джойстиков или аппаратов управления скоростью и направлением движения самоходной машины.
| ЭЛЕКТРИЧЕСКАЯ СИЛОВАЯ ПЕРЕДАЧА ДЛЯ РАБОЧЕЙ МАШИНЫ | 2006 |
|
RU2394701C2 |
| US 2012116619 А1, 10.05.2012 | |||
| RU 2008132748 A, 20.02.2010 | |||
| Электрический выключатель | 1930 |
|
SU20184A1 |

