Настоящее устройство относится к устройству и к соответствующему способу отделения пачек или групп плоских изделий, каждая из которых содержит заданное количество предметов и непрерывно подается для отправки, например, к упаковочной машине.
Устройства этого типа часто объединены с машинами для формирования бумажных салфеток и подобных изделий. Они обычно имеют канал для продвижения предметов, а с этим каналом взаимосвязано большое количество отделяющих пальцев, которые подвижны вдоль закрытого пути, содержащего переднюю часть, которая параллельна каналу для продвижения предметов и в которой отделяющие пальцы продвигаются параллельно и одновременно с предметами, а также возвратную часть.
Бумажные салфетки формируют формирующими машинами, содержащими пару гибочных роликов с вертикальными осями, образующих горловину, через которую подают материал в виде бумажной полосы, которую обычно сгибают по продольной линии. Система зажимов или отверстий для присасывания, взаимосвязанная с гибочными роликами, поочередно захватывает материал в виде полосы с одной и с другой стороны, так что он сгибается зигзагообразно за горловиной из роликов. При этом образуется горизонтальная стопка согнутого полосного материала, причем она прижимается к центральному ножу, который режет эту стопку на две симметричные части, создавая две параллельные стопки салфеток. Две стопки должны быть разделены на пачки или группы, при этом каждая из них содержит заданное количество салфеток. Для этой цели сконструированы различные отделяющие устройства.
В одном из типов гибочного устройства отделение последовательных пачек салфеток осуществляют посредством расположения салфеток по конфигурации в виде зубьев пилы и введения отделяющих пальцев между смежными пачками, с тем чтобы обеспечить их отделение и выгрузку. Примеры машин этого типа описаны в патентах США US-A-3451521 и US-A-5281082 и в патенте Германии DE-A-2427635.
В других типах машин салфетки выходят из машины в виде равномерных стопок. Два гибочных ролика формирующей машины взаимосвязаны с двумя непрерывными транспортерами, расположенными по обеим сторонам канала для продвижения стопки материала, выходящего из гибочной машины, при этом транспортеры несут на себе большое количество отделяющих пальцев, которые вставляются между последовательными пачками салфеток. Каждая пара пальцев расположена в положении ожидания позади гибочных роликов или в утопленном корпусе в одном из роликов, а когда достигнуто желаемое количество салфеток, отделяющие пальцы продвигаются с согнутым изделием к зоне выгрузки. Устройство этого типа описано в патенте Японии JP-A-557165. Подобное же отделяющее устройство, но объединенное с машиной, которая подает ранее нарезанные листы, описано в патенте Франции FR-A-2398007. В этом устройстве отделяющие пальцы временно отцепляются от непрерывного транспортера, представленного в виде цепи, и остаются в утопленном корпусе ролика, падающего плоские предметы. Когда достигнуто желаемое количество плоских предметов, пальцы входят в зацепление с транспортером и начинают продвигаться в том же самом направлении, что и стопки листов, выходящие из машины.
Подобная система описана в патенте США US-A-4938465. В данном случае отделяющие пальцы входят в зацепление с непрерывным транспортером и выходят из зацепления с ним посредством сложной магнитной системы. В зоне выгрузки салфеток отделяющие пальцы направляют подбирающий захват, который захватывает отдельные пачки салфеток сверху и выводит их.
В патенте США US-A-5393196 раскрыто устройство, в котором отдельные пачки плоских предметов перемещаются из зоны формирования пачек к зоне выгрузки посредством двух отстоящих друг от друга переднего и заднего держателей. В зоне формирования задний держатель вставляют совместно с дополнительным передним держателем между только что выполненной пачкой и первым предметом следующей пачки. Затем упомянутый задний держатель перемещают в сторону от дополнительного переднего держателя для перемещения готовой пачки по пути продвижения к зоне выгрузки, в то время как в зоне формирования формируется последующая пачка.
Системы, известные в настоящее время, сложны и требуют больших затрат.
Задача настоящего изобретения заключается в создании отделяющего устройства для отделения пачек плоских предметов, забираемых из стопки непрерывно подаваемых предметов, которое проще и надежнее обычных устройств.
Другая задача настоящего изобретения заключается в создании устройства, которое более экономично, чем известные устройства.
Еще одна задача настоящего изобретения заключается в создании машины для формирования салфеток или подобных изделий, которая имеет эффективное и быстродействующее отделяющее устройство.
Задача настоящего изобретения также заключается в создании устройства, которое обладает особой гибкостью, другими словами, устройства, которое обеспечивает возможность формирования пачек, содержащих любое количество предметов, без необходимости применения сложных переходных операций, и которое имеет ограниченное количество подвижных частей или приводных устройств.
Эти и другие цели и преимущества, которые будут очевидны квалифицированным специалистам в этой отрасли при прочтении приведенного далее текста, обеспечивают посредством устройства вышеупомянутого типа, содержащего по меньшей мере одну пару направляющих, расположенных друг над другом и имеющих фактически равную протяженность, образующих закрытый путь, множество пар ползунов, расположенных вдоль упомянутых направляющих, при этом первый ползун каждой пары расположен в первой из направляющих, а второй ползун расположен во второй из направляющих, причем каждый ползун несет на себе по меньшей мере один соответствующий отделяющий палец. Средство фазового смещения, которое временно перемещает первый ползун в сторону от второго ползуна каждой пары для перемещения одной пачки предметов в сторону от последующей пачки, расположено в конце передней части закрытого пути отделяющих пальцев. В течение той фазы, при которой два ползуна перемещаются в сторону друг от друга, один из них предпочтительно удерживается в неподвижном состоянии, с тем чтобы удерживать предметы, в то время как другой совершает продвижение.
При таком расположении достаточно просто переместить одну пачку предметов, выгружаемую в сторону от предыдущей пачки. Поскольку два отделяющих пальца каждой пары независимы друг от друга, перемещение пальцев друг от друга может быть относительно большим и таким, чтобы обеспечить направление пачки при ее движении опрокидывания и облегчить введение элемента временного удержания, например ножа, между выгружаемой пачкой и последующей пачкой, которая все еще расположена в стопке предметов, продвигающихся вдоль канала.
Могут быть обеспечены одна или две пары направляющих, в которых одна направляющая находится выше другой, причем в соответствии с типом предметов, с которыми приходится иметь дело, и с формой канала для продвижения. В том случае, когда отделяющие пальцы проникают, например, в стопку предметов снизу (способом, подобным тому, который описан в патенте Франции FR-A-2398007), достаточно разместить пару направляющих, расположенных одна над другой или позади друг друга, под каналом для продвижения, который имеет соответствующие прорези в своем основании для прохождения отделяющих пальцев. Напротив, если отделяющие пальцы проникают в стопку предметов сбоку, они предпочтительно будут расположены по обеим сторонам стопки. В этом случае устройство будет содержать две пары направляющих, в которых одна направляющая находится над другой с расположением вдоль обеих сторон канала для продвижения предметов.
В возможном варианте осуществления конструкции устройства средство фазового смещения содержит звездочку с прорезями, вращающуюся вокруг своей оси, снабженную двумя группами первых средств зацепления (например, двумя группами прорезей), расположенными на разных высотах вдоль осевого протяжения упомянутой звездочки и отстоящих друг от друга в угловом направлении. Упомянутые первые средства зацепления взаимодействуют со вторыми средствами зацепления (например, с выступами), взаимосвязанными с упомянутыми ползунами. Эта конфигурация особенно проста и надежна. Однако не исключены и другие решения, например в виде пары колебательных рычагов, приводимых в движение посредством линейного приводного средства или чего-либо подобного.
Предпочтительно, чтобы для упрощения конструкции устройства можно было выполнить ползуны свободно скользящими в соответствующих направляющих вдоль передней части закрытого пути, и приводить их в поступательное движение посредством предметов, среди которых они вставлены. Этим обеспечиваются значительные преимущества по сравнению с обычными машинами, описанными, например, в известных патентах, которые упомянуты выше. В частности, можно обойтись без всех сложных систем для поступательного движения пальцев и для зацепления ползунов с системами поступательного движения и отщепления ползунов от них. Таким образом устройство становится более простым и более надежным.
На обратном пути ползуны могут накапливаться и подталкиваться тем же самым средством фазового смещения, которое забирает отдельные пары ползунов с переднего пути и переносит их к обратному пути. Напротив, могут быть созданы средства возвратного приведения в движение, взаимосвязанные с упомянутой возвратной частью закрытого пути для возврата ползунов к началу передней части пути. Приводное средство может состоять из толкающей системы с поршнем и цилиндром, пневматической системы или предпочтительно из гибкого элемента ременного или эквивалентного типа, который входит в зацепление с ползунами для их продвижения в направлении, противоположном направлению продвижения предметов в устройстве. С этой целью можно обеспечить щетинки, взаимодействующие с отделяющими пальцами, взаимосвязанными с одной из упомянутых направляющих, при этом отделяющие пальцы, взаимосвязанные с другой направляющей, могут быть подсоединены (в результате придания специальной формы) к пальцам, зацепленным щетинками гибкого элемента или иным приводным средством. Это решение является особенно простым и надежным и исключает какой-либо вид возвратно-поступательного движения, а также потребление сжатого воздуха.
Устройство может иметь вставной элемент, который забирает пары ползунов из возвратной части упомянутого пути и вводит их в переднюю часть между одной пачкой образованных предметов и последующей пачкой. Вставной элемент может заставить отделяющие пальцы следовать по надлежащей траектории, которая при этом может оказаться помехой соответствующему гибочному ролику гибочной машины, с которой взаимосвязано устройство. В этом случае гибочный ролик известным способом может быть обеспечен соответствующей кольцеобразной канавкой.
Вставной элемент может состоять из диска с прорезями, постепенно вращающегося вокруг своей оси и обеспеченного зацепными элементами, которые взаимодействуют с соответствующими средствами зацепления, взаимосвязанными с ползунами, расположенными в двух направляющих, находящихся друг над другом.
На разгрузочном конце устройства могут быть обеспечены различные системы для выгрузки пачек предметов, отделенных отделяющими пальцами. В особенно предпочтительном варианте осуществления конструкции на конце упомянутого канала для продвижения предметов может быть образована наклонная поверхность с транспортером для удаления предметов. Наклонная поверхность содержит стопор для предметов и имеет возможность перемещения параллельно направлению продвижения предметов. Перемещение может быть обеспечено пассивным способом посредством введения эластичного элемента, например спиральной пружины, либо может быть обеспечено посредством соответствующего приводного устройства, контролируемого надлежащим образом центральным блоком устройства.
Дополнительные предпочтительные отличительные признаки и варианты осуществления конструкции согласно изобретению будут описаны в последующем тексте.
Изобретение также относится к гибочной машине для получения бумажных салфеток или подобной продукции и к способу отделения пачек плоских предметов, например сложенных бумажных салфеток, что определено в прилагаемых пунктах формулы изобретения.
Изобретение можно будет лучше понять из описания и из прилагаемых фигур, на которых показан практический, не налагающий ограничений пример изобретения. На фигурах:
на фиг. 1 представлен вид в плане устройства согласно изобретению, монтируемого на гибочной машине для изготовления салфеток;
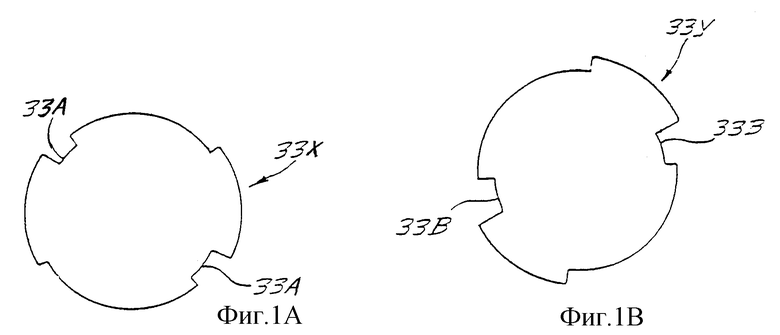
на фиг. 1A и 1B представлены две части, в которых может быть выполнена звездочка для фазового смещения ползунов, несущих отделяющие пальцы;
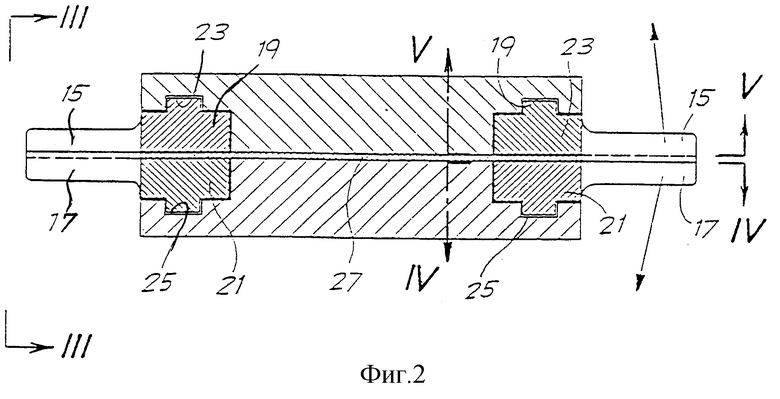
на фиг. 2 представлено локальное поперечное сечение по линии II-II на фиг. 1;
на фиг. 3 представлен локальный передний вид по линии III-III на фиг. 2;
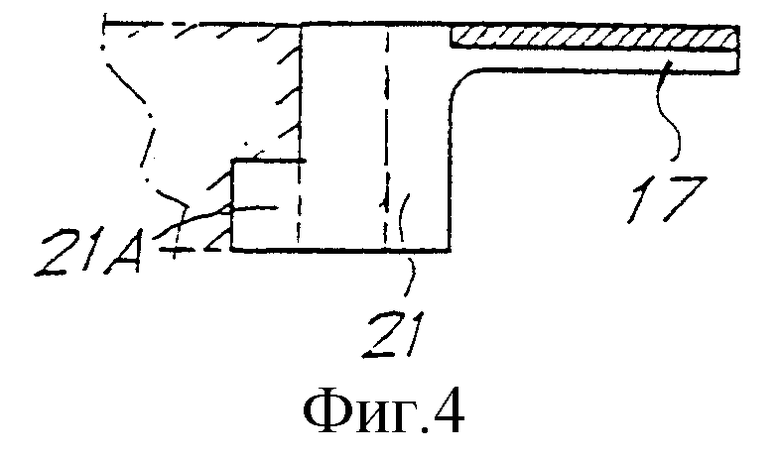
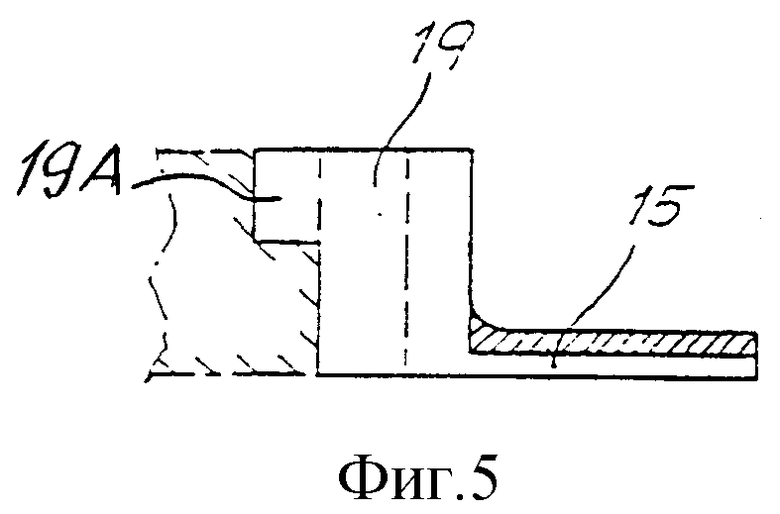
на фиг. 4 и 5 представлены локальные сечения по линиям IV-IV и V-V на фиг. 2 и 3;
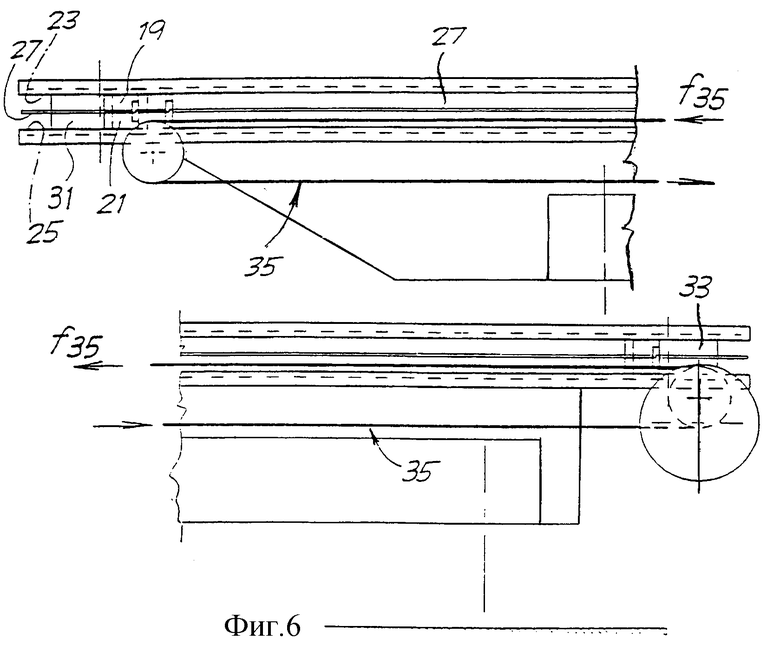
на фиг. 6 представлен боковой вид по линии VI-VI на фиг. 1;
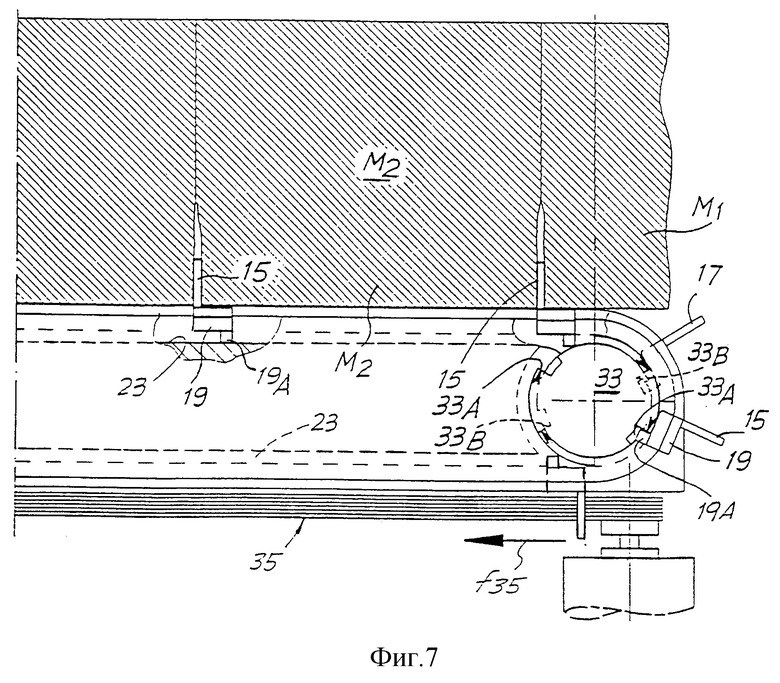
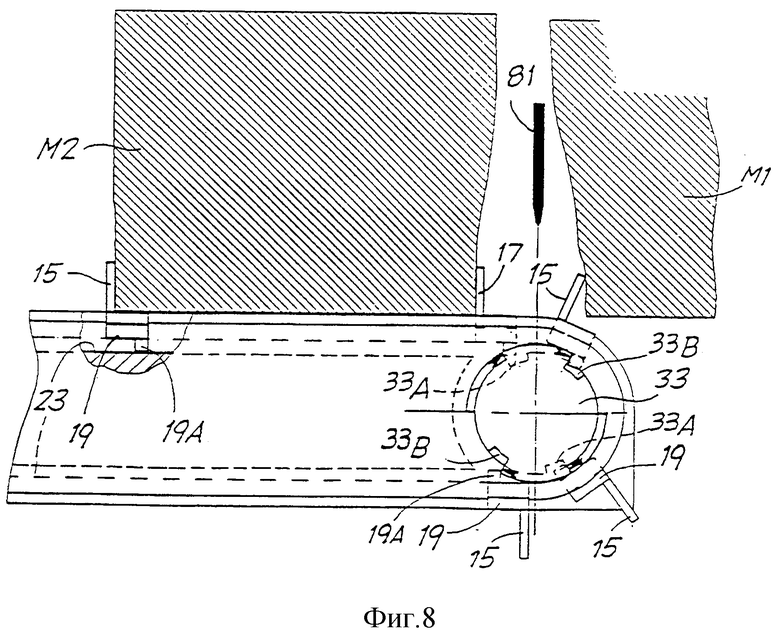
на фиг. 7-9 представлен увеличенный подробный вид согласно фиг. 1 в трех последовательных фазах цикла выгрузки пачки или группы предметов;
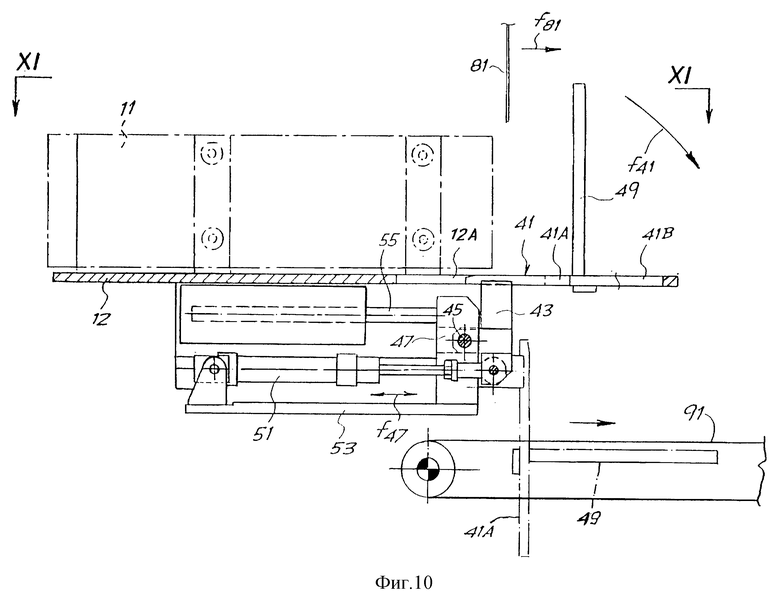
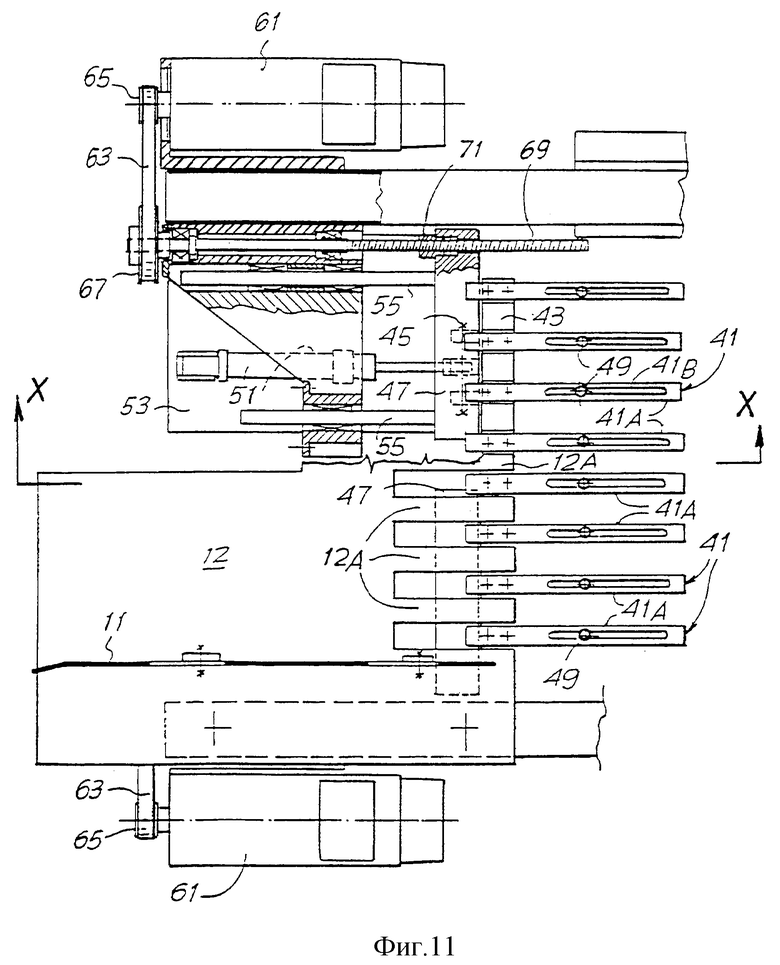
на фиг. 10 представлено продольное сечение средства выгрузки предметов по линии X-X на фиг. 11;
на фиг. 11 представлен вид в плане и в частичном сечении приблизительно по линии XI-XI на фиг. 10;
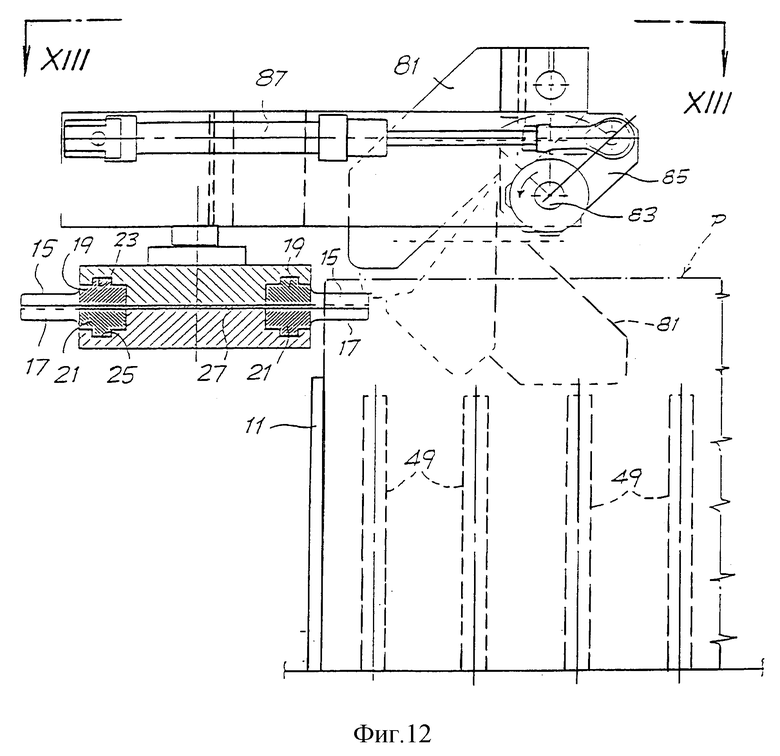
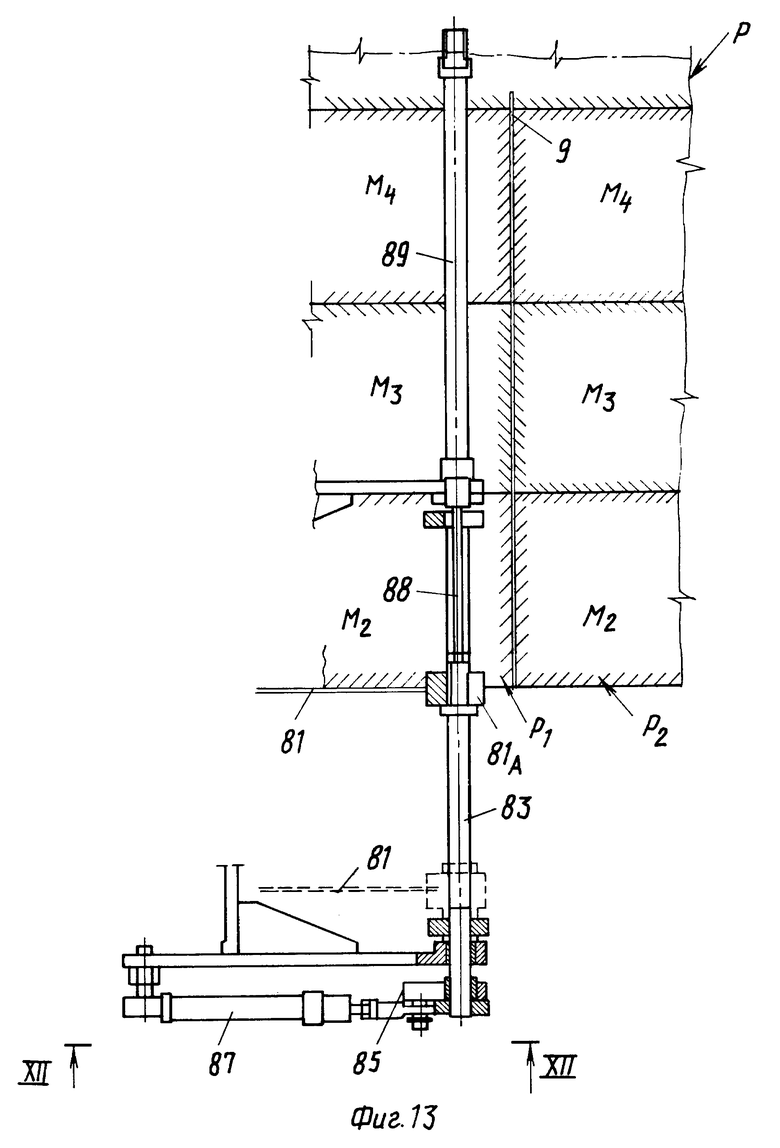
на фиг. 12 представлен локальный вид спереди удерживающего ножа для стопки предметов по линии XII-XII на фиг. 13;
на фиг. 13 представлен вид по линии XIII-XIII на фиг. 12 с удаленными частями.
На прилагаемых фигурах позициями 1 и 3 обозначены два гибочных ролика гибочной машины для формирования стопки P салфеток. Гибочные ролики 1 и 3, которые поворачиваются вокруг двух вертикальных осей A и B, имеют кольцеобразные канавки 1A, 3A, которые вмещают криволинейные рычаги 5 и 7, отделяющие согнутый материал от ролика и толкающие его к стопке P ранее образованных предметов, покидающих машину. Непрерывный материал N в виде полосы, который может быть сложен по продольной линии, подают в горловину, образованную между двумя роликами, причем эти ролики представляют собой взаимосвязанные системы известного типа, которые сгибают материал, покидающий горловину, один раз вокруг ролика 1 и один раз вокруг ролика 3, с тем чтобы создать стопку материала, согнутого зигзагообразно. При каждом сгибе соответствующий криволинейный рычаг 5, 7 отделяет материал от ролика и толкает его к ранее образованной стопке P.
Работа гибочной машины, описанная в сжатой форме, известна и поэтому подробно не представлена.
Стопка P согнутого материала в виде полосы подталкивается к поперечному ножу 9, который разрезает эту стопку на две части P1 и P2, каждая из которых образована большим количеством салфеток, согнутых в четыре раза. После ножа 9 расположен делитель, который удерживает две части P1 и P2, на которые разрезана стопка, отдельно друг от друга, обеспечивая независимое манипулирование этими двумя частями.
Стопки P, P1, P2 продвигаются в канале, образованном парой боковых частей 11 и панелью 12 основания, в конце которого пачки салфеток M1, M2...Mn, каждая из которых содержит заданное количество предметов, выгружаются.
Для отделения одной пачки салфеток M1 от последующей пачки M2 по боковым сторонам канала для продвижения стопок P, P1, P2 расположены пары отделяющих пальцев 15, 17. Каждый отделяющий палец 15, 17 выполнен за одно целое с соответствующим ползуном 19, 21, который скользит в соответствующей направляющей 23, 25. Две направляющие 23, 25, размещенные одна над другой и отделенные разделительной стенкой 27, изготовленной из материала с низким коэффициентом трения для облегчения скольжения ползунов, расположены с каждой наружной стороны канала для продвижения стопок P, P1, P2. Направляющие 23, 25 формируют закрытый путь и в каждой из них расположено идентичное количество ползунов, соответственно 19 и 21, причем таким образом, что на каждой стороне канала для продвижения каждый ползун 19 и соответствующий палец 15 в направляющей 23 сопрягается с ползуном 21 и соответствующим пальцем 17 в нижней направляющей 25. С каждой стороны канала расположено идентичное количество пар пальцев 15, 17.
С каждой стороны канала для продвижения стопок P, P1, P2 каждая из двух направляющих 23, 25 имеет два прямолинейных участка, параллельных направлению продвижения стопки P, соединенных круглыми концевыми частями, одна их которых примыкает к соответствующему гибочному ролику 1, 3, а другая находится у зоны выгрузки салфетки.
Как показано на фиг. 2-5, ползунам 19, 21 и соответствующим пальцам 15, 17 придана такая форма, что, когда два ползуна 19, 21 расположены друг над другом, верхний ползун 19 входит в зацепление с нижним ползуном 21 таким образом, что когда упомянутый нижний ползун приведен в движение в направлении по часовой стрелке вдоль соответствующей направляющей 25, он движется со своим верхним ползуном 19 в целях, которые будут разъяснены далее. Это достигается посредством ступенчатой формы двух обращенных друг к другу краев отделяющих зубьев 15, 17, подробно показанных на виде спереди согласно фиг. 3.
В криволинейных зонах направляющих 23, 25 находится диск 31 с прорезями (вблизи от соответствующего гибочного ролика 1, 3) и звездочка 33 с прорезями (в зоне выгрузки). Диск 31 с прорезями имеет ряд продольных прорезей 31A, глубина которых приблизительно равна толщине двух направляющих 23, 25. Каждая прорезь 31A входит в зацепление с двумя ползунами 19, 21, расположенными друг над другом, посредством выступов 19A, 21A, расположенных на задней части (иными словами на части, противоположной отделяющим пальцам 15, 17) каждого ползуна. При таком расположении постепенное вращение в направлении по часовой стрелке (стрелка f31) диска 31 с прорезями вызывает перенос ползунов 19, 21 парами от соответствующего наружного прямолинейного участка направляющей 23, 25 к внутреннему прямолинейному участку, иными словами к тому, который обращен к стопке P предметов, в то время как относительное положение ползунов 19, 21 одного над другим сохраняется. Постепенное вращение диска 31 с прорезями может быть обеспечено посредством иной соответствующей системы, например посредством механизма с обгонной муфтой, приводимого в движение приводным устройством с линейным цилиндром и поршнем, либо вращательным приводным устройством.
Напротив, звездочка 33 с прорезями имеет две группы прорезей 33A, 33B, смещенных друг от друга в угловом направлении приблизительно на 30-40o и расположенных на двух разных уровнях вдоль продольного протяжения звездочки. При этом, поскольку выступы 19A и 21A ползунов 19 и 21 расположены на разной высоте, постепенное вращение звездочки 33 с прорезями в направлении по часовой стрелке (стрелка f33) вызывает перенос ползунов 19, 21 от внутреннего прямолинейного участка к наружному прямолинейному участку соответствующих направляющих и одновременно вызывает смещение в угловом направлении каждого ползуна 19 и соответствующего пальца 15 по отношению к нижнему ползуну 21 и соответствующему пальцу 17. Смещение равно приблизительно 30-40o, иными словами равно угловому смещению прорезей 33A, 33B. Это приводит к существенному перемещению концов пальцев 15, 17 в сторону друг от друга.
На практике звездочка 33 с прорезями может быть выполнена в виде двух дискообразных частей, которые соединены друг с другом. На фиг. 1A, 1B отдельно показаны две дискообразные части 33X, 33Y в угловом положении по отношению друг к другу, в котором они могут быть смонтированы. Две прорези 33A выполняют в дискообразной части 33X, в то время как две прорези 33B выполняют в дискообразной части 33Y. Такая конфигурация облегчает и упрощает изготовление звездочки 33. Также подобным способом (из идентичных элементов) могут быть выполнены имеющие прорези звездочки 33 с разным смещением между прорезями 33A, 33B. Если две части 33X, 33Y соединены обратимо, одна и та же звездочка 33 с прорезями может регулироваться в соответствии со специальными требованиями к изготовлению с обеспечением переменного и регулируемого смещения между прорезями 33A и 33B.
С каждой стороны канала для продвижения стопок P, P1, P2 предметов и параллельно наружному прямолинейному участку каждой пары направляющих 23, 25 проходит непрерывный гибкий элемент 35, идущий вокруг двух шкивов и снабженный щетинками, которые входят в зацепление с пальцами 17, переносимыми от звездочки 33 с прорезями к наружному прямолинейному участку соответствующей направляющей 25, и продвигают их, как указано стрелкой f35, в направлении, противоположном направлению продвижения стопок P, P1, P2 предметов. Как описано выше, форма ползунов 19, 21 и пальцев 15, 17 такова, что продвижение пальца 17 и ползуна 21 посредством щетинок непрерывного гибкого элемента 35 вызывает поступательное движение соответствующего верхнего ползуна 19. Гибкий элемент 35 несет на себе ползуны 19, 21 до тех пор, пока они не будут остановлены диском 31 с прорезями, как показано на фиг. 1. Несколько пар пальцев 15, 17 накапливается позади диска 31 с прорезями и при этом гибкий элемент 35 может проходить под ним благодаря деформации щетинок, которыми снабжен этот элемент. При каждом повороте диска 31 с прорезями пальцы 15, 17, накопленные у него, подталкиваются для сохранения контакта с диском. Количество ожидающих пальцев 15, 17 позади диска 31 с прорезями зависит от размера образуемых пачек предметов M1-Mn; количество неподвижных пар пальцев 15, 17 увеличивается с размером каждой отдельной пачки.
Устройство, описанное до этого места, действует следующим образом.
Гибочные ролики 1 и 3 непрерывно вращаются, формируя стопку P, которая затем разрезается ножом 9 на две части P1 и P2. На этой стадии пара отделяющих пальцев 15, 17 находится в ожидании рядом с каждым роликом 1, 3 и остается неподвижной снаружи зоны сгиба. Когда достигнуто заданное количество сгибов с образованием заданного количества салфеток посредством резания, выполняемого ножом 9, с каждой стороны машины соответствующий диск 31 с прорезями поворачивается на один шаг, приводя пару ползунов 19, 21, а следовательно, и соответствующих пальцев 15, 17, расположенных один над другим, из отведенного положения снаружи от гибочных роликов к зоне сгиба в положение, более продвинутое, чем то место, в котором выполняется предыдущий сгиб материала N в виде полосы. Это перемещение делается возможным за счет наличия кольцеобразных канавок в гибочных роликах 1 и 3. Ползуны 19 и 21 полностью высвобождаются из диска 31 с прорезями и могут свободно скользить в направляющих соответственно 23 и 25 вдоль части пути, обращенной к каналу для продвижения.
Когда подача материала N в виде полосы, а следовательно, и сгибание материала с накапливанием согнутого материала в стопке P продолжается, две пары пальцев 15, 17 с двух сторон канала для продвижения, перемещаемые соответствующими дисками 31 с прорезями в зону активного сгибания, остаются зацепленными между одной складкой и последующей складкой и начинают продвигаться вдоль направляющих 23, 25, подталкиваемые упомянутыми стопками P, P1, P2 предметов, продвигающихся в результате действия рычагов 7. Не требуется никаких принудительных средств продвижения отделяющих пальцев вдоль активного участка их пути.
Когда две пары ползунов 19, 21, расположенные друг над другом с двух сторон канала для продвижения стопок P, P1, P2, достигают конца прямолинейного участка направляющих 23, 25, поворот звездочек 33 на один шаг вызывает угловое перемещение верхних отделяющих пальцев 15 (с соответствующими ползунами 19) в сторону от нижних отделяющих пальцев 17 (с соответствующими ползунами 21). Эта операция представлена на фиг. 7 и 8. При этом более продвинутая пачка салфеток M1 перемещается от последующей пачки M2 для облегчения выгрузки пачки M1 посредством разгрузочных средств, которые будут описаны ниже. Каждый нижний ползун 19 удерживается в своем угловом положении, показанном на фиг. 8, посредством наталкивания выступа 19A на периферийную кромку звездочки 33, пока прорезь 33B не войдет а зацепление с соответствующим выступом 19A, поворачивая ползун 19 и соответствующий палец 17 в направлении по часовой стрелке.
Такое последовательное вращение (фиг. 9) каждой из двух звездочек 33 вызывает отцепление нижних отделяющих пальцев 17 от стопки предметов, которая временно удерживается ножом 81, более подробно описанным далее по тексту. Посредством последовательных поворотов на один шаг звездочек 33 с прорезями ползуны 19, 21 подводятся поверх соответствующих непрерывных гибких элементов 35, так что они возвращаются к дискам 31 с прорезями и начинают новый цикл.
Средства выгрузки отдельных пачек M1, M2...Mn предметов подробно представлены на фиг. 10-12.
Стенка 12, образующая основание канала для продвижения стопок P, P1, P2 заканчивается в гребнеобразной части 12A, которая взаимодействует с подвижной поверхностью 41, образованной большим количеством полос 41A, несомых кронштейном 43, шарнирно прикрепленным в месте, обозначенном позицией 45, к блоку 47. Каждая полоса 41A имеет прорезь 41B, в которой стержень 49, ортогональный к поверхности 41, зацеплен в отрегулированном положении. Стержни 49 выровнены друг с другом, чтобы образовать вертикальную поверхность для остановки и сдерживания стопки предметов.
Поверхность 41, образованная полосами 41A, может быть наклонена вокруг оси 45 приводным средством 51, содержащим цилиндр и поршень и несомым плитой 53, которая выполнена за одно целое с блоком 47. Блок 47 с плитой 53, приводным средством 51 и поверхностью 41 также перемещается в направлении двойной стрелки f47. Перемещение обеспечивается за счет того, что полосы 41A, образующие поверхность 41, проникают в пустоты, образованные в гребеночной части 12A поверхности 12 для скольжения стопки P предметов. Управление этим перемещением осуществляется "бесщеточным" электромотором 61 или чем-либо подобным, который передает движение через зубчатый ремень 63 и пару шкивов 65, 67 к штоку 69 с резьбовой нарезкой, с которым входит в зацепление шаровая навинчиваемая гайка 71, несомая блоком 47. Расположение симметрично по обеим сторонам канала для продвижения стопки предметов. Управление двигателем 61 предпочтительно может быть осуществлено по линии электросвязи, при этом двигатель управляет перемещением, как функцией толщины полосы материала N и скорости, с которой этот материал подается и сгибается, в целях, которые будут очевидны из последующего текста.
Нож 81, приводимый в движение механизмом, отдельно и подробно представленным на фиг. 12 и 13, расположен над поверхностью 41. Нож 81 жестко прикреплен к валу 83, который проходит параллельно направлению продвижения стопок P, P1, P2 предметов, таким образом, что он совершает колебания совместно с валом вокруг оси вала. Вал 83 посредством рычага 85 жестко прикреплен к системе 87, состоящей из цилиндра и поршня, которая вызывает его колебания вокруг своей оси, чтобы вызвать колебания ножа 81 между верхним положением, в котором он отведен от стопок P, P1, P2 (показанным на фиг. 12 сплошными линиями), и нижним положением (показанным на фиг. 12 пунктирными линиями), в котором стопка предметов покоится на ноже.
Опора 81A ножа (фиг. 13) также жестко прикреплена к штоку 88 дополнительного приводного устройства 89, включающего в себя цилиндр и поршень, которое перемещает нож 81 в направлении, параллельном направлению продвижения стопки P.
Описанное здесь расположение симметрично, а пары ножей 81 находятся вблизи друг от друга, по одному для каждой части P1, P2 стопки предметов, выпускаемых из машины.
Операции по выгружению пачек предметов происходят следующим образом.
Вначале стержни 49 занимают свое положение, ближайшее к гибочным роликам 1, 3, и передние предметы в стопках P, P1, P2 опираются на стержни 49 и подталкиваются к ним. Когда полосный материал N согнут и роликами 1, 3 с ножом 9 образованы салфетки, стержни перемещаются под регулятор двигателя 61, с тем чтобы обеспечить пространство для новых предметов, выпускаемых из машины.
Датчик (не показан) посылает сигнал, когда пара пальцев 15, 17 достигает положения, показанного на фиг. 1. Этот сигнал является разрешением для начала цикла выгрузки пачки M1 салфеток, который происходит следующим образом: пальцы 15, 17 с каждой стороны канала для продвижения перемещаются на расстоянии друг от друга в положение, показанное на фиг. 8; нож 81 опускается и проникает в пространство, создаваемое перемещением пальцев 15, 17 на расстоянии друг от друга, при этом поверхность 41 поворачивается на 90o посредством приводного устройства 51, состоящего из цилиндра и поршня, для опрокидывания пачки M1 на транспортер 91, содержащая большое количество параллельных лент, между которыми проходят полосы 41A и соответствующие стержни 49. На этой стадии палец 15 сопровождает наклонное перемещение пачки салфеток в течение первой части этого наклонного перемещения, удерживая пачку сзади. Последующая пачка M2 удерживается фронтально посредством соответствующего пальца 17 и ножа 81. Когда пачка M1 оседает на транспортер 91 и удаляется транспортером из зоны выгрузки, поверхность 41 вновь приподнимается посредством приводного устройства 51, содержащего цилиндр и поршень, в то время как бесщеточный двигатель вызывает перемещение системы 41, 43, 47, 49 назад в положение, в котором стержни 49 входят в соприкосновение с передней поверхностью пачки M2. Это положение определяется линией электросвязи, управляющей бесщеточным двигателем 61, в соответствии с толщиной полосного материала N и производительностью, а тем временем нож 81 продвигается посредством толкающего действия стопки предметов для обеспечения непрерывной работы сгибающего устройства без существенного увеличения сжатия предметов. Перед возвращением поверхности 41 и стержней 49 в их положение поддерживания для продвижения стопки, посредством звездочек 33 (фиг. 9) осуществляется отвод пальцев 17, так что пачка M2 на следующей стадии удерживается только ножом 81, который свободно продвигается при толкающем действии стопки P, вытягивая шток системы 89, состоящей из цилиндра и поршня. Когда стержни 49 вновь входят в соприкосновение с первой салфеткой продвигающейся стопки, нож 81 отводится вверх посредством приводного устройства 87 и затем возвращается в первоначальное положение посредством приводного устройства 89.
Как можно видеть на прилагаемых фигурах, приводные устройства, которые обеспечивают выгрузку пачек предметов, сдвоены и симметричны, при этом выгрузка пачек M1 из двух частей P1 и P2, на которые разрезана стопка P, может происходить неодновременно.
Понятно, что на фигурах представлен только пример, являющийся лишь практической демонстрацией изобретения, и что изобретение может быть изменено по форме и расположению без отклонения от объема его руководящей концепции. Указание позиционных номеров в прилагаемых пунктах формулы изобретения выполнено с целью облегчения прочтения формулы изобретения со ссылками на описание и фигуры и не ограничивает объем защиты, определяемый пунктами формулы изобретения.


Изобретение относится к устройству и к соответствующему способу отделения пачек или групп плоских изделий, каждая из которых содержит заданное количество предметов и непрерывно подается для отправки, например, к упаковочной машине. Задачей изобретения является создание устройства для отделения пачек плоских предметов, забираемых из стопки непрерывно подаваемых предметов, которое проще и надежнее обычных устройств. Указанная задача решается за счет того, что устройство для отделения пачек или групп плоских изделий содержит канал для продвижения предметов и взаимосвязанное с каналом большое количество отделяющих пальцев, которые имеют возможность перемещения по закрытому пути. С каждой стороны канала для продвижения обеспечена по меньшей мере одна пара направляющих, расположенных друг над другом и имеющих фактически равную протяженность, для формирования упомянутого закрытого пути. Вдоль направляющих расположены пары ползунов, при этом каждый ползун несет на себе по меньшей мере один соответствующий отделяющий палец. На конце передней части расположено средство фазового смещения, которое временно перемещает упомянутый первый ползун в сторону от второго ползуна каждой пары для перемещения одной пачки предметов в сторону от последующей пачки. 3 с. и 24 з.п.ф-лы, 13 ил.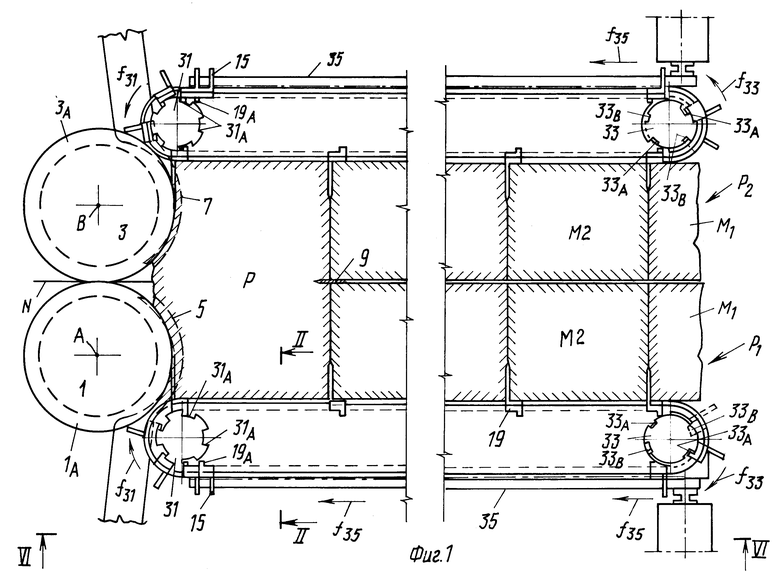
| БИБЛИОТЕКА t. МТЕГ ^^O'TiXHH^ECfjAHi | 0 |
|
SU294675A1 |
| Клеймодержатель | 1974 |
|
SU526419A1 |
| US 5393196 A1, 28.02.1995 | |||
| СПОСОБ ИЗВЛЕЧЕНИЯ ГЕЛЕПОДОБНОГО КОНЦЕНТРАТА ПРИ ОБРАБОТКЕ УГЛЕВОДОРОДНЫХ МАСЕЛ | 2009 |
|
RU2398007C1 |
| Кормовая добавка | 1986 |
|
SU1387959A1 |
| Механизм разделения потока сфальцованных листов | 1974 |
|
SU535200A1 |

