Изобретение относится к буровой технике, а именно к конструкции рабочего оборудования гидравлических экскаваторов для бурения ям.
Известно рабочее оборудование для бурения ям, включающее связанную с базовой машиной стрелу, установленный на ней рабочий орган в виде бура с приводом, гидроцилиндры управления и механизм стабилизации рабочего органа (авт. свид. СССР N 861534, кл. E 21 B 7/26, 1980).
Несмотря на достаточно сложное схемно-конструктивное выполнение механизмов привода рабочего органа, его подъема и стабилизации известное техническое решение не обеспечивает качественного выполнения технологического процесса. Вертикальная траектория перемещения рабочего органа при его заглубления в грунт и подъеме может быть получена только при соответствующем манипулировании базовой машины. Это требует определенного навыка оператора и увеличивает время на выполнение работы.
Наиболее близким к предлагаемому по технической сущности и достигаемому результату является рабочее оборудование гидравлического экскаватора, включающее связанную с базовой машиной стрелу, установленный на ней рабочий орган в виде бура с приводом и гидроцилиндры управления, один из которых служит для подъема стрелы, а второй управляет рабочим органом. Базовая машина связана со стрелой через шарнирно-рычажный механизм вертикального перемещения рабочего органа, выполненного в виде стойки, двух распорных звеньев и тяги, причем стойка и распорные звенья кинематически связаны с базовой машиной и стрелой, а тяга размещена в замкнутом контуре механизма перемещения и шарнирно соединяет стойку с распорные звенья между собой (авт. свид. СССР N 1460131, кл. E 02 F 3/627, 1987).
В рассматриваемом рабочем оборудовании гидравлического экскаватора механизм вертикального перемещения рабочего органа достаточно сложен в конструктивном отношении и кинематически представляет собой шестизвенный шарнирно-рычажный механизм. В отдельных положениях звенья этого механизма испытывают усилия, многократно превосходящие полезную нагрузку от внедрения и подъема рабочего органа. Это, в первую очередь, обусловлено нерациональным соотношением составляющих усилий в звеньях шарнирно-рычажного механизма, когда отдельные его элементы занимают взаимное положение, близкое к "мертвому", например, в нижнем положении стрелы, когда тяга и нижнее распорное звено оказываются под небольшим углом друг к другу. Конструктивно-кинематическая неопределенность количественного соотношения длин звеньев механизма вертикального перемещения рабочего органа затрудняет практическое его выполнение и использование.
Задача предлагаемого изобретения - повысить надежность работы рабочего оборудования гидравлического экскаватора при условии качественного выполнения технологического процесса бурения ям за счет схемно-конструктивного изменения шарнирно-рычажного механизма вертикального перемещения рабочего органа и кинематики связи гидроцилиндра подъема стрелы.
Поставленная задача достигается тем, что в рабочем оборудовании гидравлического экскаватора, включающем связанную с базовой машиной стрелу, установленный на ней рабочий орган в виде бура с приводом и гидроцилиндры управления, один из которых служит для подъема стрелы, а второй управляет рабочим органом, при этом базовая машина связана со стрелой через шарнирно-рычажный механизм вертикального перемещения рабочего органа, который содержит стойку, два распорных звена и тягу, причем стойка и распорные звенья кинематически связаны с базовой машиной и стрелой, а тяга размещена в замкнутом контуре механизма перемещения и шарнирно соединяет стойку и распорное звено между собой, стойка на базовой машине закреплена жестко, а распорные звенья смонтированы на стойке один над другим и связаны со стрелой, кинематически образуя с последней четырехзвенный прямолинейно-направляющий механизм Чебышева, верхнее распорное звено которого выполняет роль кривошипа, а нижерасположенное распорное звено - роль шатуна, в качестве тяги использован гидроцилиндр подъема стрелы, соединяющий стойку со средней частью шатуна, при этом продольная ось гидроцилиндра расположена параллельно стреле в ее нижнем положении, стрела с кривошипом образует угол в пределах 30 - 155o, первое значение из которых соответствует верхнему положению стрелы, а второе - ее нижнему положению, причем оси шарниров кривошипа и шатуна, которыми они закреплены на стойке, расположены на одной вертикальной линии.
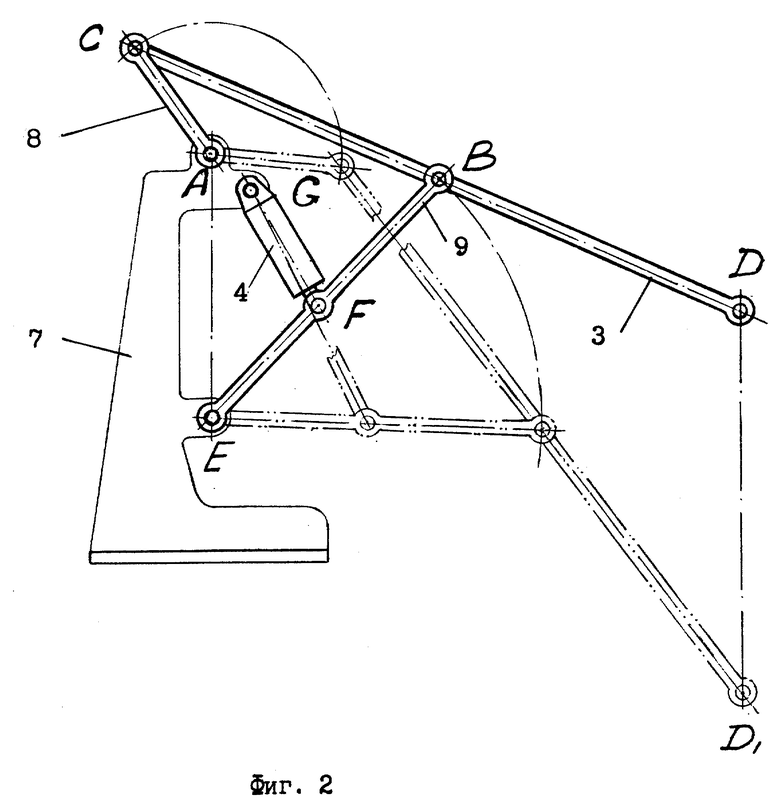
На фиг. 1 изображено рабочее оборудование гидравлического экскаватора, общий вид; на фиг. 2 - кинематическая схема механизма вертикального перемещения рабочего органа.
Рабочее оборудование гидравлического экскаватора включает рабочий орган в виде шнекового бура 1 с приводом 2, стрелу 3, гидроцилиндр 4 управления положением стрелы 3, гидроцилиндр 5 управления положением шнекового бура 1. Стрела 3 опирается на базовую машину 6 через механизм вертикального перемещения, причем последний, в свою очередь, смонтирован на стойке 7, которая жестко установлена на базовой машине 6 и выполняет роль основания механизма. Механизм вертикального перемещения кинематически представляет собой шарнирно-рычажный четырехзвенный прямолинейно-направляющий механизм Чебышева, который включает стойку 7, закрепленные на стойке посредством шарниров A и E два распорных звена 8, 9 и стрелу 3, которая подвешена на других концах распорных звеньев в шарнирах C и B, причем верхнее распорное звено 8 выполняет роль кривошипа, нижерасположенное распорное звено 9 - роль шатуна, а стрела 3 в этом механизме - роль коромысла, на внешнем конце которого в шарнире D закреплен рабочий орган - шнековый бур с приводом. При этом соотношение длины звеньев этого четырехзвенника удовлетворяет условиям упомянутого механизма Чебышева:
CB = BE = BD = 2,5AC; AE = 2AC
В предложенном механизме вертикального перемещения ведущим звеном является шатун 9, который перемещает другие звенья этого механизма. Для чего шатун 9 в своей средней части снабжен осью F, которая шарнирно соединяет его с тягой, выполненной в виде силового элемента переменной длины, в качестве которого использован гидроцилиндр 4 подъема стрелы. Другой конец гидроцилиндра (тяги) через ось G опирается на основание - стойку 7.
Для обеспечения движения точки D по вертикали (линия D-D1) шарниры A и E кривошипа 8 и шатуна 9, которыми они закреплены на стойке, располагаются на одной вертикальной линии.
Для снижения нагрузок, действующих на звенья механизма вертикального перемещения рабочего органа, необходимо выполнение следующих условий:
при выдвинутом штоке гидроцилиндра подъема стрела занимает нижнее положение и она параллельна продольной оси гидроцилиндра или достаточно близка к этому, а с кривошипом в этом положении стрела образует угол не более 155o;
при втянутом штоке гидроцилиндра стрела занимает верхнее положение и с кривошипом в этом положении она образует угол не менее 30o.
Рабочее оборудование гидравлического экскаватора работает следующим образом.
Перед началом работы оборудования шнековый бур 1 переводится в вертикальное положение за счет переключения гидроцилиндра 5 в плавающее положение. Перемещением базовой машины 6 и изменением положения стрелы 3 гидроцилиндром 4 нижний конец бура 1 подводится к поверхности грунта в месте бурения ямы. Далее приводом 2 бур 1 приводится во вращательное движение. Затем выдвижением штока гидроцилиндра 4 осуществляется заглубление бура 1 в грунт, причем шток гидроцилиндра, перемещаясь, поворачивает шатун 9 вокруг шарнира E, который, в свою очередь, перемещает стрелу 3 и кривошип 8. При этом стрела совершает сложное движение, так ее точка B движется по часовой стрелке вокруг шарнира E по радиусу BE, а точка C движется также по часовой стрелке вокруг шарнира A по радиусу CA, который в 2,5 раза меньше BE. Благодаря указанному выше соотношению длин звеньев шарнирно-рычажного четырехзвенного механизма точка D стрелы 3 движется по линии D-D1, параллельной AE или весьма близкой к этому. Поскольку точки A и E находятся на одной вертикальной линии, то и точка D с шарнирно подвешенным в ней рабочим органом перемещается по вертикали или весьма близко к этому.
Вертикальное перемещение рабочего органа обеспечивает удовлетворительные условия для выполнения технологического процесса бурения ям.
При извлечении бура 1 движения звеньев механизма осуществляется в обратном направлении, приводя к вертикальной выемке рабочего органа из пробуренной ямы.
В предложенном шарнирно-рычажном четырехзвенном механизме рабочая зона возможных угловых перемещений стрелы с рабочим органом и кривошипа ограничена и находится в диапазоне 30-155o. При этом угол 30o между кривошипом и стрелой образуется, когда последняя находится в крайнем верхнем положении, а угол 155o между ними образуется, когда стрела займет крайнее нижнее положение. И, как очевидно, кривошип и стрела, меняя свое взаимное угловое положение, не доходят до так называемого "мертвого положения". Это исключает резкое увеличение нагрузок на звенья механизма в крайних положениях и делают ее близкой к постоянной в ходе заглубления рабочего органа в грунт и его подъеме, что ведет к снижению расчетных нагрузок на эти звенья механизма.
Установка силового гидроцилиндра с выдвинутым штоком параллельно стреле ведет к тому, что в верхнем положении с уже втянутым штоком гидроцилиндр оказывается в положении, близком к перпендикулярному к шатуну 9. Поэтому поперечные составляющие реакций в шарнире F в этом положении будут минимальными, что создает благоприятные условия для внедрения бурового инструмента в грунт.
Силовой анализ предложенного механизма показывает, что в ходе заглубления рабочего органа в грунт и его подъеме нагрузки на гидроцилиндр и отдельные звенья механизм вертикального перемещения рабочего органа изменяются в ограниченных пределах и имеют сравнительно небольшое увеличение в зонах, близких к крайним нижнему и верхнему положениям.
Предложенное рабочее оборудование гидравлического экскаватора имеет достаточно простую конструкцию, весьма просто в управлении и обеспечивает безопасные условия работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕРЕДВИЖНОЕ ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 1997 |
|
RU2137700C1 |
| КРУТОНАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 1998 |
|
RU2152342C1 |
| ПИТАТЕЛЬ ДЛЯ ПОДАЧИ СИЛЬНОСВЯЗНЫХ ПЛОХОСЫПУЧИХ МАТЕРИАЛОВ | 2000 |
|
RU2199480C2 |
| КРУТОНАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2000 |
|
RU2184693C2 |
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ ВОЗДУХА | 2000 |
|
RU2174429C1 |
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ ВОЗДУХА | 2000 |
|
RU2176542C1 |
| Устройство для разгрузки материала с транспортера | 2001 |
|
RU2224706C2 |
| МЯГКИЙ КОНТЕЙНЕР | 2000 |
|
RU2199478C2 |
| УСТРОЙСТВО ДЛЯ РАЗГРУЗКИ МАТЕРИАЛА С ТРАНСПОРТЕРА | 2001 |
|
RU2199479C2 |
| Винтовой конвейер | 2001 |
|
RU2220897C2 |
Изобретение относится к буровой технике, а именно к рабочему оборудованию гидравлических экскаваторов для бурения ям. Рабочее оборудование включает связанную с базовой машиной стрелу, на которой установлен рабочий орган в виде бура с приводом и гидроцилиндры управления, один из которых служит для подъема стрелы, а второй управляет рабочим органом. Базовая машина связана со стрелой через шарнирно-рычажный механизм вертикального перемещения бура, который содержит стойку, два распорных звена и тягу, стойка и распорные звенья кинематически связаны с базовой машиной и стрелой, а тяга размещена в замкнутом контуре механизма перемещения и шарнирно соединяет стойку и распорное звено между собой. Стойка на базовой машине закреплена жестко, а распорные звенья смонтированы на стойке один над другим и связаны со стрелой, кинематически образуя с последней шарнирно-рычажный четырехзвенный прямолинейно-направляющий механизм Чебышева. Верхнее распорное звено выполняет роль кривошипа, а ниже-расположенное распорное звено - роль шатуна. Управление положением стрелы осуществляется гидроцилиндром, который размещен в замкнутом контуре механизма перемещения и шарнирно соединяет стойку со средней частью шатуна. Стрела с кривошипом образует угол в пределах 30- 155 град., первое значение из которых соответствует верхнему положению стрелы, а второе значение - ее нижнему положению. Оси шарниров кривошипа и шатуна, которыми они закреплены на стойке, лежат на одной вертикальной линии. Повышается надежность работы рабочего оборудования гидравлического экскаватора при качественном выполнении технологического процесса бурения ям. 2 ил.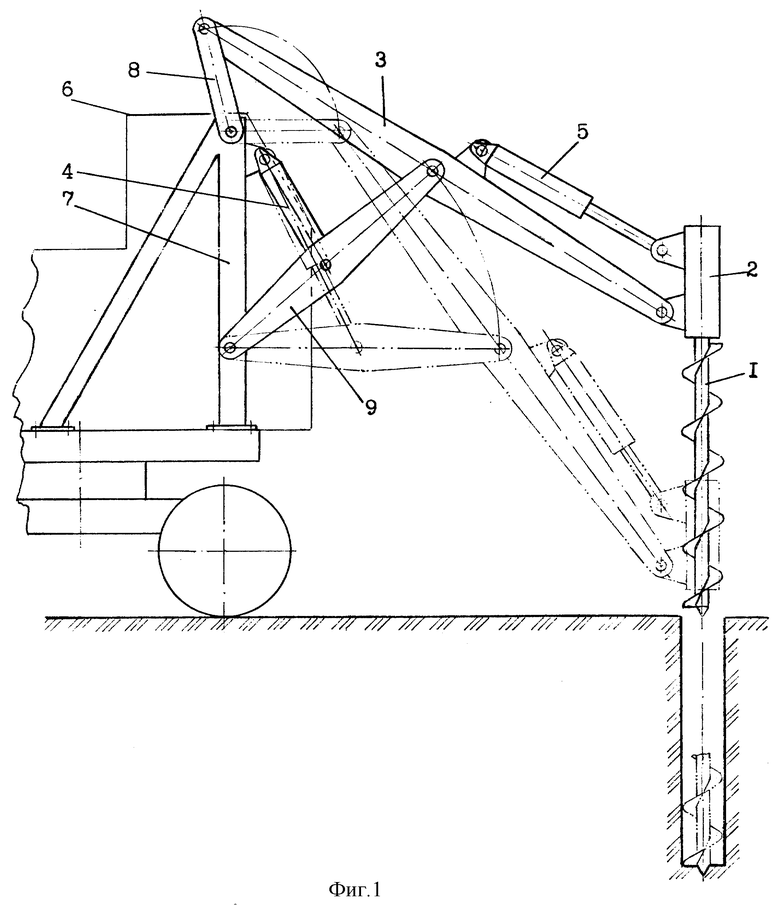
Рабочее оборудование гидравлического экскаватора, включающее связанную с базовой машиной стрелу, установленный на ней рабочий орган в виде бура с приводом и гидроцилиндры управления, один из которых служит для подъема стрелы, а второй управляет рабочим органом, при этом базовая машина связана со стрелой через шарнирно-рычажный механизм вертикального перемещения рабочего органа, который содержит стойку, два распорных звена и тягу, причем стойка и распорные звенья кинематически связаны с базовой машиной и стрелой, а тяга размещена в замкнутом контуре механизма перемещения и шарнирно соединяет стойку и распорное звено между собой, отличающееся тем, что стойка на базовой машине закреплена жестко, а распорные звенья смонтированы на стойке один над другим и связаны со стрелой, кинематически образуя с последней четырехзвенный прямолинейно-направляющий механизм Чебышева, верхнее распорное звено которого выполняет роль кривошипа, а нижерасположенное распорное звено - роль шатуна, при этом в качестве тяги использован гидроцилиндр подъема стрелы, соединяющий стойку со средней частью шатуна, продольная ось гидроцилиндра расположена параллельно стреле в ее нижнем положении, стрелы с кривошипом образует угол в пределах 30 - 155o, первое значение из которых соответствует верхнему положению стрелы, а второе - ее нижнему положению, причем оси шарниров кривошипа и шатуна, которыми они закреплены на стойке, расположены на одной вертикальной линии.
| Рабочее оборудование гидравлического экскаватора | 1987 |
|
SU1460131A1 |
| Устройство для бурения скважин | 1987 |
|
SU1472584A1 |
| Рабочее оборудование гидравлического экскаватора | 1981 |
|
SU1008362A1 |
| US 3645019 A, 29.02.1972 | |||
| СПОСОБ ПРИГОТОВЛЕНИЯ КОНСЕРВОВ "СИЧЕНИКИ РЫБНЫЕ УКРАИНСКИЕ" | 2007 |
|
RU2351217C1 |
| Зубчатое колесло | 1985 |
|
SU1240989A1 |
| DE 1484756 A, 02.01.1975. | |||
