Изобретение относится к грузоподъемному оборудованию и может быть использовано в качестве прицепного к трактору грузоподъемного устройства.
Известно передвижное грузоподъемное устройство, содержащее раму с ходовыми колесами, аутригерами и проушинами для соединения с тягачом, шарнирно установленную на раме стрелу с грузозахватным приспособлением, два расположенных под углом друг к другу силовых цилиндра подъема и поворота стрелы, шарнирно соединенных с рамой и стрелой. При этом грузовая стрела выполнена из двух секций - коренной и гуська с крюковой подвеской на внешнем конце -, причем гусек приводится в действие автономным силовым цилиндром (авт. свид. СССР N 1102768, B 66 F 9/12, 1982).
Кинематически механизм подъема стрелы представляет собой шарнирно-рычажный механизм, управляемый силовыми цилиндрами.
Известно также грузоподъемное устройство (манипулятор), содержащий четырехзвенный параллелограмный механизм, несущий секционную грузовую стрелу, силовые цилиндры для перемещения стрелы в вертикальной плоскости и привод силовых цилиндров. Грузовая стрела состоит из основной и дополнительной секций. Дополнительная секция (гусек) шарнирно связана с основной и приводится в действие автономным силовым цилиндром (авт. свид. СССР N 674970, B 66 C 23/04, 1976).
Оба рассматриваемых решения имеют общий признак: грузовая стрела выполнена секционной, и каждая секция приводится в действие своим автономным силовым цилиндром. Требуемая траектория перемещения крюковой подвески, в том числе и по вертикали, что необходимо для безопасной работы и исключения поперечной раскачки груза, особенно в начале его подъема или в конце опускания, обеспечивается за счет независимой одновременной работы обоих силовых цилиндров, один из которых связан с основной (коренной) секцией, а другой - с гуськом.
Наиболее близким к предлагаемому является передвижное грузоподъемное устройство, содержащее раму с ходовыми колесами и сцепным устройством для соединения с тягачом, механизм подъема стрелы, кинематически представляющий собой шарнирно-рычажный четырехзвенный механизм, включающий кривошип, шатун и выполняющее роль грузовой стрелы коромысло, и два силовых цилиндра для подъема и перемещения стрелы в продольной вертикальной плоскости. При этом один силовой цилиндр шарнирно связан с кривошипом, а второй силовой цилиндр одновременно является шатуном и шарнирно связан с грузовой стрелой. Последняя на внешнем конце снабжена крюковой подвеской (ФРГ заявка N OS 3112135, B 66 C 23/42, публ. 1982).
Требуемая траектория перемещения грузового крюка, в том числе и по вертикали, достигается в этом решении за счет независимой одновременной работы обеих силовых цилиндров, один из которых перемещает кривошип, а второй цилиндр, выполняющий роль шатуна, изменяет его длину.
У всех рассмотренных грузоподъемных устройств необходимая траектория перемещения крюковой подвески, в том числе и по вертикали, возможна только при независимой одновременной работе как минимум двух силовых цилиндров. Для обеспечения независимой одновременной работы двух силовых цилиндров грузоподъемные устройства должны быть оборудованы гидросистемой, включающей также два гидронасоса, два распределителя и прочие агрегаты. Это значительно усложняет конструкции грузоподъемных устройств, и в этой части они мало чем будут отличаться от широко используемых автомобильных кранов.
В случае использования в качестве тягача обычного трактора сельскохозяйственного назначения, оборудованного собственной гидросистемой, на грузоподъемном устройстве не отпадает необходимость наличия двухконтурной гидросистемы. Это обусловлено тем, что тракторы сельскохозяйственного назначения оборудуются раздельно-агрегатной гидросистемой, включающей насос, распределитель, бак с фильтром, трубопроводы, основной гидроцилиндр и до трех пар выводов для выносных цилиндров, которые можно устанавливать на прицепных машинах. При этом для предотвращения самопроизвольной перетечки рабочей жидкости и, как следствие, неопределенных перемещений силовых цилиндров предусмотрено, что в работу может включаться в любой момент времени только один из этих силовых цилиндров, т.е. они могут включаться попеременно.
У рассматриваемых грузоподъемных устройств получить необходимую траекторию движения крюка, в частности по вертикали, за счет попеременной работы силовых цилиндров не представляется возможным. В лучшем случае попеременно манипулируя двумя силовыми цилиндрами можно получить траекторию движения крюка в виде ломанной линии. Однако в начале подъема груза или в конце его опускания по условиям обеспечения безопасности это недопустимо.
Можно конечно переоборудовать трактор, установив на нем еще одну гидросистему. Это обеспечит автономную работу силовых цилиндров и получение необходимой траектории движения грузового крюка у рассматриваемых грузоподъемных устройств. Но это вызовет усложнение конструкции трактора и грузоподъемное устройство потеряет универсальность, так как агрегатирование его будет возможно только с этим переоборудованным трактором.
В то же время в сельскохозяйственных предприятиях, иногда непосредственно в полевых условиях, хотя и не так часто, требуется произвести разгрузку (или погрузку) автотранспортных средств, в том числе крупногабаритных грузов. При этом здесь имеются тракторы сельскохозяйственного назначения.
Поэтому существует необходимость создания прицепного грузоподъемного устройства, которое должно быть достаточно простым и трактор использовался бы не только в качестве тягача, но и как источник энергии для привода рабочих органов грузоподъемного устройства. При этом должны обеспечиваться условия безопасной работы, и от оператора не требовалось бы специальных навыков в манипулировании несколькими цилиндрами для подъема или опускания груза.
Поставленная задача достигается тем, что передвижное грузоподъемное устройство содержит раму с ходовыми колесами, сцепное устройство и смонтированные на раме грузовую стрелу, кривошип и шатун, являющиеся звеньями шарнирно-рычажного четырехзвенного механизма, и связанный с ним силовой цилиндр подъема стрелы. Шарнирно-рычажный четырехзвенный механизм выполнен в виде прямолинейно-направляющего механизма Чебышева, при этом силовой цилиндр подъема стрелы связан со средней частью шатуна упомянутого механизма и расположен параллельно грузовой стреле в ее верхнем положении, грузовая стрела с кривошипом образуют угол в пределах 30-155o, первое значение из которых соответствует нижнему положению стрелы, а второе - ее верхнему положению, причем оси шарниров кривошипа и шатуна, которыми они закреплены на основании, лежат в одной вертикальной плоскости.
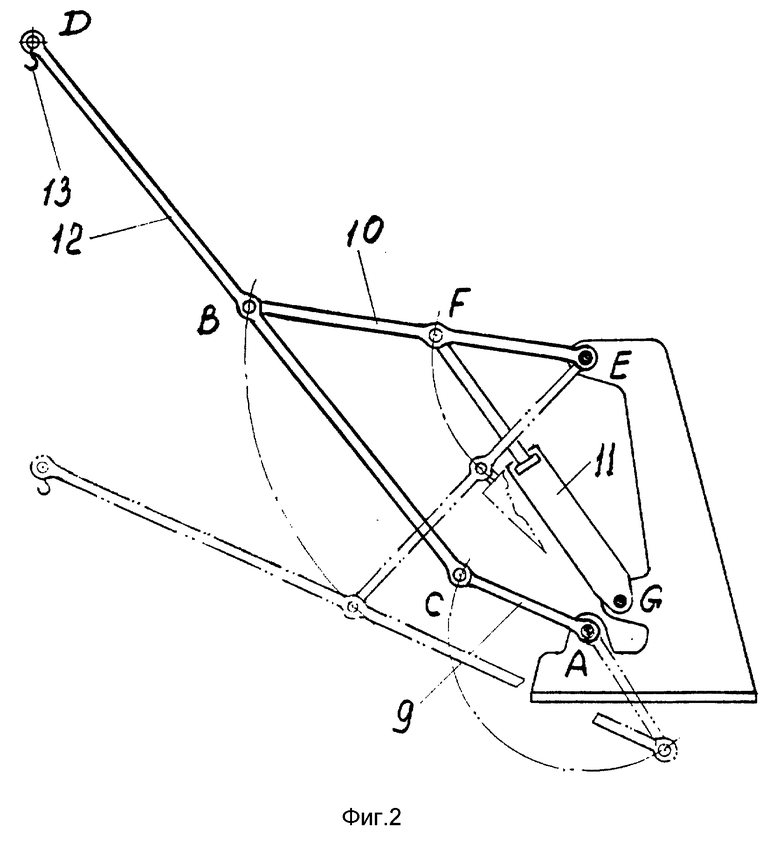
На фиг. 1 изображено передвижное грузоподъемное устройство, вид сбоку; на фиг. 2 - кинематическая схема механизма подъема стрелы.
Передвижное грузоподъемное устройство содержит раму 1, в задней части которой установлены аутригеры 2 и ось с ходовыми колесами 3, а передняя часть снабжена устройством 4 для соединения с навесной системой трактора 5. В средней части рамы в проушинах шарнирно установлена стойка 6, которую в вертикальном положении удерживают растяжки 7 и 8, обеспечивая жесткую связь рамы и стойки. Кинематически рама, стойка и растяжки являются единым звеном механизма и выполняют роль основания.
На стойке 6 в проушинах установлены оси шарниров А, E и G, с помощью которых закреплены кривошип 9, шатун 10 и гидроцилиндр 11. На других концах кривошипа и шатуна на шарнирах В и С подвешена грузовая стрела 12 с крюком 13. Кривошип 9, шатун 10 и грузовая стрела 12 вместе с основанием 1, 6, 7 и 8 образуют шарнирно-рычажный четырехзвенный механизм. При этом длины звеньев этого четырехзвенника удовлетворяют условиям механизма Чебышева:
CB = BE = ED = 2,5 AC.
В предложенном механизме ведущим звеном является шатун 10, который и перемещает другие звенья этого механизма. Для чего шатун 10 в своей средней части снабжен осью F, которая шарнирно соединяет его с гидроцилиндром 11. Другой конец гидроцилиндра через ось G опирается на стойку 6 основания. При этом для снижения нагрузок, действующих на звенья механизма подъема грузовой стрелы, необходимо выполнение следующих условий:
шарниры кривошипа А и шатуна E, которыми они закреплены на основании, располагаются на одной вертикальной линии;
при выдвинутом штоке гидроцилиндра грузовая стрела занимает верхнее положение, и она параллельна верхней оси гидроцилиндра или достаточно близка к этому, а с кривошипом в этом положении грузовая стрела образует угол не более 155o;
при втянутом штоке грузовая стрела занимает нижнее положение и с кривошипом в этом положении она образует угол не менее 30o.
Передвижное грузоподъемное устройство работает следующим образом.
Трактор задним ходом подъезжает к грузоподъемному устройству. Навесная система трактора и сцепное приспособление грузоподъемного устройства соединяются друг с другом, при этом гибкие шланги грузоподъемного устройства соединяют с соответствующими штуцерами гидросистемы трактора. С помощью трактора грузоподъемное устройство подается в зону погрузки, и его аутригеры переводятся в рабочее положение.
Для подъема или опускания грузовой стрелы с крюком оператор перемещением рукоятки гидрораспределителя трактора включает подачу масла в соответствующую полость гидроцилиндра 11 грузоподъемного устройства. Шток гидроцилиндра, перемещаясь, поворачивает звено 10 вокруг шарнира E, которое, в свою очередь, перемещает грузовую стрелу 12 и кривошип 9. При этом грузовая стрела совершает сложное движение, так ее точка B движется вокруг шарнира E по радиусу BE, а точка С движется вокруг шарнира А по радиусу CA, который в 2,5 раза меньше BE. Благодаря указанному выше соотношению длин звеньев шарнирно-рычажного четырехзвенного механизма точка D грузовой стрелы движется по линии, параллельной AE или весьма близкой к этому. Поскольку точки A и E находятся на одной вертикальной линии, то и точка A с шарнирно подвешенным в ней грузовым крюком 13 движется по линии, весьма близкой к вертикали. Это обеспечивает безопасные условия работы и исключает необходимость манипулирования перемещениями как минимум двух звеньев грузовой стрелы, что имеет место у известных механизмов.
Предложенный механизм подъема стрелы обеспечивает близкой к линейной зависимость нагрузок на звенья механизма от массы поднимаемого груза. В первую очередь это обусловлено тем, что в ходе подъема или опускания груза кривошип и грузовая стрела, меняя свое взаимное угловое положение, не доходят до так называемого "мертвого положения" В известных шарнирно-рычажных механизмах, в том числе и механизме Чебышева, оно наступает в тех случаях, когда коромысло и кривошип оказываются на одной прямой линии или весьма близко к ней и угол между ними будет равен нулю или 180o.
В предложенном механизме рабочая зона возможных угловых перемещений грузовой стрелы и кривошипа ограничена и находится в диапазоне 30-155o. При этом угол 30o. между кривошипом и грузовой стрелой образуется когда последняя находится в крайнем нижнем положении, а угол 155o между ними образуется, когда грузовая стрела займет крайнее верхнее положение. И, как очевидно, кривошип и грузовая стрела не доходят до "мертвого положения". Это исключает резкое увеличение нагрузок на звенья механизма в крайних положениях и делают ее близкой к постоянной в ходе подъема конкретного груза, что и ведет к снижению расчетных нагрузок на эти звенья механизма.
Установка силового цилиндра с выдвинутым штоком параллельно грузовой стреле ведет к тому, что в нижнем положении с уже втянутым штоком гидроцилиндр оказывается в положении, близком к перпендикулярному к шатуну 10. Поэтому поперечные составляющие реакций в шарнире F в этом положении будут минимальными, что создает благоприятные условия для начала подъема груза.
Силовой анализ предложенного механизма показывает, что в ходе подъема груза определенной массы нагрузки на гидроцилиндр и отдельные звенья механизма подъема стрелы изменяются в ограниченных пределах и имеют сравнительно небольшое увеличение в зонах, близких к крайним нижнему и верхнему положениям.
Контргруз 14, установленный в передней части грузоподъемного устройства, снижает опрокидывающий момент, который передается на трактор при выполнении грузовых операций.
Предложенное передвижное грузоподъемное устройство имеет достаточно простую конструкцию и агрегатируется с трактором сельскохозяйственного назначения, который выполняет функции не только тягача, но и его гидросистема приводит в действие механизм подъема грузовой стрелы, при этом не требуется внесения каких-либо конструктивных изменений в гидросистему трактора. Конструкция устройства обеспечивает безопасные условия работы, так как независимо от навыков оператора подъем и опускание груза производятся по вертикали. В управлении грузоподъемное устройство весьма просто и не требует выполнения манипулирования отдельными частями грузовой стрелы.
По сути предложенное грузоподъемное устройство является прицепным орудием. Оно может найти широкое применение в сельском хозяйстве, в том числе и в полевых условиях, например, для разгрузки автотранспортных средств при доставке крупногабаритной сельхозтехники, при погрузке контейнеров и подобных грузов.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАБОЧЕЕ ОБОРУДОВАНИЕ ГИДРАВЛИЧЕСКОГО ЭКСКАВАТОРА | 1998 |
|
RU2152486C1 |
| КРУТОНАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 1998 |
|
RU2152342C1 |
| КРУТОНАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2000 |
|
RU2184693C2 |
| ПИТАТЕЛЬ ДЛЯ ПОДАЧИ СИЛЬНОСВЯЗНЫХ ПЛОХОСЫПУЧИХ МАТЕРИАЛОВ | 2000 |
|
RU2199480C2 |
| МЯГКИЙ КОНТЕЙНЕР | 2000 |
|
RU2199478C2 |
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ ВОЗДУХА | 2000 |
|
RU2174429C1 |
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ ВОЗДУХА | 2000 |
|
RU2176542C1 |
| ПИТАТЕЛЬ ДЛЯ ПОДАЧИ СИЛЬНОСВЯЗНЫХ ПЛОХОСЫПУЧИХ МАТЕРИАЛОВ | 2000 |
|
RU2191729C2 |
| УСТРОЙСТВО ДЛЯ РАЗГРУЗКИ МАТЕРИАЛА С ТРАНСПОРТЕРА | 2001 |
|
RU2199479C2 |
| Устройство для разгрузки материала с транспортера | 2001 |
|
RU2224706C2 |
Передвижное грузоподъемное устройство содержит раму с ходовыми колесами, сцепное устройство и смонтированные на раме грузовую стрелу, кривошип и шатун, являющиеся звеньями шарнирно-рычажного четырехзвенного механизма, и связанный с ним силовой цилиндр подъема стрелы. Шарнирно-рычажный четырехзвенный механизм выполнен в виде прямолинейно-направляющего механизма Чебышева, при этом силовой цилиндр подъема стрелы связан со средней частью шатуна и расположен параллельно грузовой стреле в ее верхнем положении. Грузовая стрела с кривошипом образует угол в пределах 30-155o, первое значение из которых соответствует нижнему положению стрелы, а второе значение - ее верхнему положению. Оси шарниров кривошипа и шатуна, которыми они закреплены на основании, лежат в одной вертикальной плоскости. Такое выполнение устройства обеспечивает упрощение его конструкции и эксплуатации. 2 ил.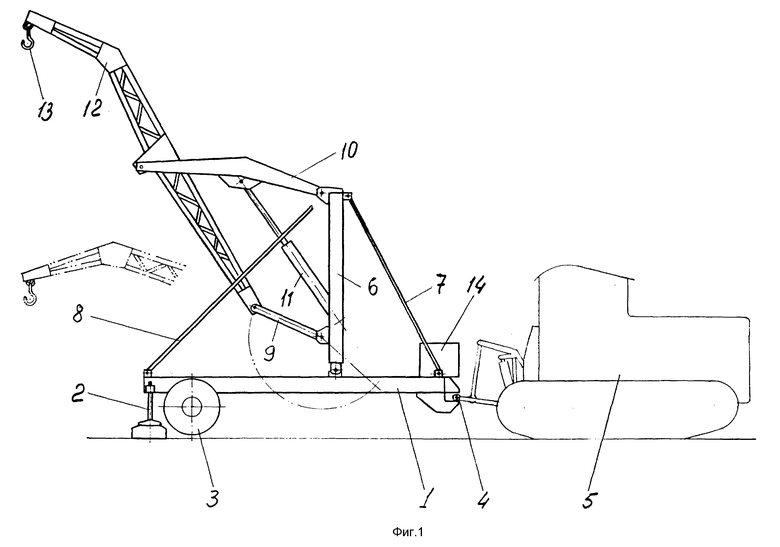
Передвижное грузоподъемное устройство, содержащее раму с ходовыми колесами, сцепное устройство и смонтированные на раме грузовую стрелу, кривошип и шатун, являющиеся звеньями шарнино-рычажного четырехзвенного механизма, и связанный с ним силовой цилиндр подъема стрелы, отличающееся тем, что шарнирно-рычажный четырехзвенный механизм выполнен в виде прямолинейно-направляющего механизма Чебышева, при этом силовой цилиндр подъема стрелы связан со средней частью шатуна упомянутого механизма и расположен параллельно грузовой стреле в ее верхнем положении, грузовая стрела с кривошипом образует угол в пределах 30 - 155o, первое значение из которых соответствует нижнему положению стрелы, а второе - ее верхнему положению, причем оси шарниров кривошипа и шатуна, которыми они закреплены на основании, лежат в одной вертикальной плоскости.
| DE 3112135 A1, 18.02.82 | |||
| Манипулятор для проведения грузовых работ | 1976 |
|
SU674970A1 |
| Передвижное грузоподъемное устройство | 1982 |
|
SU1102768A1 |
