Изобретение относится к области вертолетостроения и может быть использовано в малой авиации для повышения безопасности летательных аппаратов.
Известно устройство для перемещения аппаратов в воздушном пространстве - вертолет (см., например, Б.Н. Юрьев. Аэродинамический расчет вертолетов. - Москва, Оборонгиз, 1956 г.). Основной недостаток этого устройства - шарнирная подвеска лопастей, сложность самих лопастей, наличие автомата-перекоса для создания горизонтальной составляющей тяги, хвостового винта для парирования реактивного момента, создаваемого несущим винтом. Все это усложняет его конструкцию и тем самым снижает его надежность.
Известен летательный аппарат вертикального взлета и посадки по заявке №2000131636/28 того же автора, по которой принято положительное решение. Он является по своей технической сущности наиболее близким к предлагаемому (прототип). В этом аппарате использован движитель вертикальной тяги, корпус которого состоит из двух частей: верхней-конической и нижней-дисковой с конической отбортовкой, вставляемой в верхнюю с образованием кольцевого зазора, в котором размещены криволинейные лопатки, скрепляющие между собой обе части корпуса. В нижней части корпуса размещена с возможностью вращения вертикальная ось с рабочим колесом, лопатки которого расположены в верхней части корпуса перпендикулярно плоскости вращения колеса. Ось рабочего колеса соединена кинематически с двигателем.
Здесь же использован гидроаэродинамический движитель для создания горизонтальной тяги. С ним кинематически соединен двигатель, который может подсоединяться к движителю вертикальной тяги в случае отказа двигателя последнего. Это повышает безопасность полета.
Недостатком прототипа является то, что в случае отказа одновременно двух двигателей авария неизбежна. Поэтому дальнейшее повышение безопасности является необходимостью.
Указанные недостатки аналогов и прототипа устраняются тем, что аппарат вертикального взлета и посадки, содержащий движитель вертикальной тяги, корпус которого состоит из двух частей: верхней - конической с двумя отверстиями в торцах, сверху меньшего диаметра, а снизу - большего, и нижней - дисковой с конической отбортовкой, вставляемой в верхнюю с образованием кольцевого зазора, в котором размещены криволинейные лопатки, скрепляющие между собой обе части корпуса, в нижней части корпуса размещена с возможностью вращения вертикальная ось с закрепленным на ней рабочим колесом, лопатки которого расположены в верхней части корпуса и выполнены с минимальным зазором относительно ее внутренней поверхности, а рабочие поверхности лопаток установлены перпендикулярно плоскости вращения рабочего колеса, двигатель с обслуживающими его агрегатами и устройствами, соединенный кинематически с осью рабочего колеса движителя, кресло пилота с органами управления двигателем и движителем, снабжен тонкостенным конусом, вершина которого лежит на вертикальной оси движителя внизу аппарата, а основание закреплено на нижней - дисковой части корпуса движителя, двигатель закреплен внутри конуса, а кресло пилота установлено снаружи корпуса движителя.
Такое выполнение аппарата позволяет в случае отказа двигателя или поломки движителя произвести вертикальный спуск аппарата с практически безопасной скоростью.
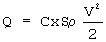
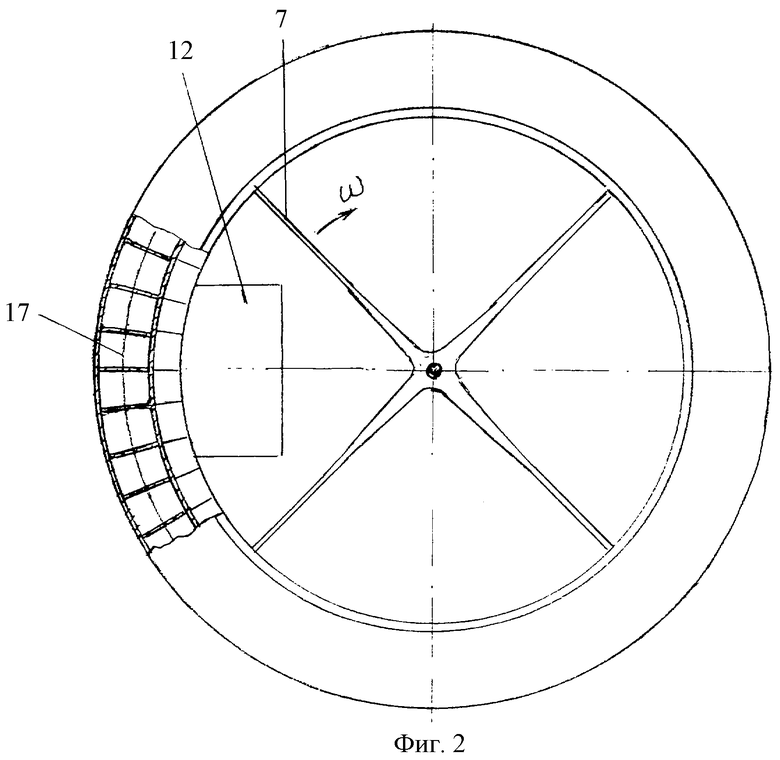
На фиг.1 изображен предлагаемый аппарат, продольный разрез; на фиг.2 - вид сверху без кресла пилота.
Аппарат содержит движитель вертикальной тяги 1, корпус которого состоит из верхней - конической части 2 и нижней - дисковой части 3 с конической отбортовкой 4, жестко скрепленных между собой криволинейными лопатками 5, равнорасположенными по окружности между конусами 2 и 4. В дисковой части 3 установлена с возможностью вращения ось 6, на которой закреплено рабочее колесо 7 движителя. Коническая отбортовка 4 жестко соединена с тонкостенным конусом 8, угол которого при вершине составляет 140-150°, обращенным вершиной вниз. Конусы 2 и 8 соосны.
Снаружи конуса 2 движителя закреплено кресло пилота 9 с органами управления двигателем и движителем. Двигатель 10 со всеми агрегатами и устройствами его обслуживающими, редуктор 11 закреплены внутри конуса 8. При этом центр тяжести аппарата без учета веса пилота должен лежать на вертикальной оси аппарата, т.е. аппарат должен быть сцентрирован. Одновременно центр тяжести должен быть расположен ниже плоскости, содержащей круг наибольшего диаметра аппарата. Аппарат снабжен заслонкой 12, которая может перемещаться в радиальном направлении, полностью или частично перекрывая часть кольцевого зазора между конусами 2 и 4 движителя, и фиксироваться. Колеса 13 установлены упруго во втулках 14, скрепленных с корпусом 3, так что каждое имеет необходимый упругий ход. Аппарат снабжен поворотными планками 15, скрепленными петлями 16 с криволинейными лопатками 5 движителя. Сквозь все планки 15 проходит трос 17 с фиксацией каждой планки на тросе. Перемещая трос по касательной в ту или иную сторону, отклоняем планки 15 от вертикали.
Аппарат работает следующим образом. Включив двигатель, начинаем подъем. При этом пилот создает своим весом нарушение центровки аппарата, поэтому подъем происходит с некоторым отклонением от вертикали в сторону направления полета. Если горизонтальная составляющая скорости полета недостаточна, то начинаем постепенно перекрывать заслонкой 12 кольцевой зазор в районе криволинейных лопаток 5, тем самым уменьшаем подъемную силу в этом месте аппарата, благодаря чему аппарат наклоняется еще больше и приобретает нужную величину горизонтальной скорости. Поворот аппарата вокруг вертикальной оси осуществляется отклонением планок 15 от вертикали. Для этого необходимо потянуть трос 17 в направлении по касательной к нему в ту или иную сторону. Тогда выходящий из аппарата поток повернет аппарат вокруг вертикальной оси, обеспечивая нужное направление полета.
При отказе двигателя аппарат начнет падать всегда вершиной конуса 8 вниз, т.к. конус оказывает стабилизирующее действие на положение аппарата в воздухе и создает необходимую силу Q сопротивления падению в соответствии с известной формулой
 ,
,
где Сх - коэффициент лобового сопротивления конуса набегающему снизу потоку,
S - площадь миделя конуса;
ρ - плотность воздуха;
V - скорость падения.
При падении с постоянной скоростью должно соблюдаться условие Q=G, где G - вес аппарата.
Из опыта установлено, что модель аппарата с диаметром основания конуса D=0,6 м и G=0,25 кг имеет скорость падения V=1 м/сек. Если принять диаметр основания конуса D=6 м, a V=4 м/с, то Q должна возрасти от изменения D - в 100 раз, а от изменения V - в 16 раз, итого - в 1600 раз. Следовательно, Q=0,25 кг · 1600=400 кг.
Таким образом, будем иметь аппарат D=6 м; V=4 м/с; G=400 кг.
Скорость падения, равная 4 м/с, считается безопасной, если ход шасси h не менее 0,08 м (см. Б.Н. Юрьева, стр.332).
Предлагаемый аппарат прост по конструкции и легко осуществим на практике. Он обеспечивает более высокий уровень безопасности летательных аппаратов малой авиации.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕЗАЭРОДРОМНЫЙ САМОЛЕТ | 2006 |
|
RU2306241C1 |
| АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2003 |
|
RU2240261C1 |
| АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2000 |
|
RU2198113C2 |
| АЭРОДИНАМИЧЕСКИЙ ДВИЖИТЕЛЬ | 1998 |
|
RU2153442C2 |
| АЭРОДИНАМИЧЕСКИЙ ДВИЖИТЕЛЬ | 1997 |
|
RU2118600C1 |
| САМОЛЕТ | 2005 |
|
RU2305053C1 |
| СНЕГОХОД | 2005 |
|
RU2279373C1 |
| ГИДРОАЭРОДИНАМИЧЕСКИЙ ДВИЖИТЕЛЬ | 1998 |
|
RU2136539C1 |
| ИНДИВИДУАЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2010 |
|
RU2422328C1 |
| ОСЕСИММЕТРИЧНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2022 |
|
RU2789464C1 |
Изобретение относится к области вертолетостроения. Аппарат имеет аэродинамический движитель вертикальной тяги, корпус которого состоит из двух частей: верхней - конической и нижней - дисковой с конической отбортовкой, входящей в верхнюю часть с образованием кольцевого зазора, в котором размещены криволинейные лопатки, скрепляющие между собой обе части корпуса движителя. Рабочее колесо движителя размещено в верхней части корпуса. Отбортовка нижней части жестко скреплена с основанием тонкостенного конуса с углом при вершине 140-150°, которая расположена ниже на вертикальной оси аппарата. Двигатель кинематически соединен с рабочим колесом движителя и расположен внутри конуса. Кресло пилота закреплено снаружи корпуса движителя. Технический результат - повышения безопасности в случае отказа двигателя или поломке движителя при спуске на землю. 2 ил.
Аппарат вертикального взлета и посадки, содержащий движитель вертикальной тяги, корпус которого состоит из двух частей: верхней-конической с двумя отверстиями в торцах, сверху меньшего диаметра, а снизу - большего, и нижней-дисковой c конической отбортовкой, вставляемой в верхнюю часть с образованием кольцевого зазора, в котором размещены криволинейные лопатки, скрепляющие между собой обе части корпуса, в нижней части корпуса размещена с возможностью вращения вертикальная ось с закрепленным на ней рабочим колесом, лопатки которого расположены в верхней части корпуса и выполнены с минимальным зазором относительно ее внутренней поверхности, а рабочие поверхности лопаток установлены перпендикулярно плоскости вращения рабочего колеса, двигатель с обслуживающими его агрегатами и устройствами, соединенный кинематически с осью рабочего колеса движителя, кресло пилота с органами управления двигателем и движителем, отличающийся тем, что он снабжен тонкостенным конусом, оказывающим стабилизирующее действие на положение в воздухе при падении, вершина которого лежит на вертикальной оси движителя внизу аппарата, а основание закреплено на нижней-дисковой части корпуса движителя, двигатель закреплен внутри конуса, а кресло пилота установлено снаружи корпуса движителя.
| АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2000 |
|
RU2198113C2 |
| АЭРОДИНАМИЧЕСКИЙ ДВИЖИТЕЛЬ | 1998 |
|
RU2153442C2 |
| АЭРОДИНАМИЧЕСКИЙ ДВИЖИТЕЛЬ | 1997 |
|
RU2118600C1 |
| Программно-аппаратный комплекс управления газовым котлом | 2019 |
|
RU2718364C1 |
| US 6050520 A, 21.09.1998 | |||
| JP 2002370696 A, 24.12.2002. | |||

