Устройство относится к области измерительной техники и может быть использовано для определения местоположения подвижных объектов.
Известен "Способ и устройство для определения относительного положения объектов" по заявке на изобретение PCT N 05406 от 1993 г., бюлл. N 8 с помощью датчиков, расположенных в узлах объекта, информация от которых объединяется, а затем определяется пеленг и дальность. Однако данное устройство обладает низкой надежностью определения координат.
Известна также "Следящая система для определения местоположения" по патенту на изобретение США N 5191342 от 1993 г., том 1148, N 1, основанная на измерении времени задержки радиосигналов, относительно опорных, и вычислении по нему местоположения. Недостатком этой системы служит ее низкая технологичность.
Наиболее близким по технической сути к предлагаемому устройству является "Совмещенный приемоиндикатор", представленный в "Трудах международного форума по радионавигации с использованием РНС "Лоран-С", Англия, Бирмингем, 1992 г., стр.339, рис.5 и взятый за прототип.
Функциональная схема прототипа представлена на фиг.1, где приняты следующие обозначения:
1,2 - антенны;
3,4 - приемники;
5 - коммутатор;
6 - фильтр;
7 - аналого-цифровой преобразователь (AЦП),
8 - вычислитель координат;
9 - индикатор.
Устройство-прототип содержит: последовательно соединенные антенну 1, приемник 3, коммутатор 5, фильтр 6, АЦП7, вычислитель координат 8 и индикатор 9, последовательно соединенные антенну 2 и приемник 4, выход которого подключен ко второму входу коммутатора 5.
Устройство-прототип работает следующим образом. Приемник 3 с помощью антенны 1 осуществляет прием радиосигналов от наземных опорных станций систем дальней навигации (типа "Лоран-С"). Аналогично приемник 4 с помощью антенны 2 производит прием радиосигналов спутниковой навигации (типа GPS). Принятый радиосигнал того или иного приемника 3,4 выбирается с помощью коммутатора 5 и подается через фильтр 6, осуществляющий его фильтрацию от помех, на АЦП7. АЦП7 преобразует сигнал из аналоговой в цифровую форму и далее цифровой сигнал подается на вычислитель координат 8, представляющий собой процессор и осуществляющий вычисление географических координат объекта. Полученное значение координат на основе сигналов наземной или спутниковой навигаций отображается на индикаторе 9.
Однако устройство-прототип обладает недостатком - низкой точностью определения координат объекта.
С целью устранения этого недостатка в устройство-прототип, содержащее две антенны, два приемника, аналого-цифровой преобразователь (АЦП), вычислитель координат, коммутатор и индикатор, при этом первая и вторая антенны подключены ко входам соответственно первого и второго приемников, выход АЦП соединен со входом вычислителя координат, дополнительно введены последовательно соединенные второй АЦП, второй вычислитель координат, первый цифровой фильтр, первый перемножитель, первый сумматор, выход которого подключен к первому входу коммутатора, последовательно соединенные датчик пути, третий АЦП, третий вычислитель координат, второй цифровой фильтр, второй перемножитель, выход которого подключен ко второму входу первого сумматора, последовательно соединенные вычитатель, третий цифровой фильтр, второй сумматор, элемент ИЛИ, выход которого подключен ко входу индикатора, последовательно соединенные датчик курса и четвертый АЦП, выход которого подключен ко второму входу третьего вычислителя координат, вычислитель весовых коэффициентов, элемент задержки и пульт управления, при этом, выходы первого и второго приемников подключены ко входам соответственно первого и второго АЦП, вторые выходы второго и третьего вычислителей координат соединены соответственно с первым и вторым входами вычислителя весовых коэффициентов, первый и второй выходы которого подключены ко вторым входам соответственно первого и второго перемножителей, первый выход первого вычислителя координат соединен с первым входом вычитателя и третьим входом третьего вычислителя координат, четвертый вход которого подключен к первому выходу второго вычислителя координат, выход пульта управления соединен с пятым входом третьего вычислителя координат, второй выход первого вычислителя координат подключен ко второму входу коммутатора, первый выход которого соединен со вторым входом вычитателя и входом элемента задержки, второй выход коммутатора подключен ко второму входу элемента ИЛИ, выход элемента задержки соединен со вторым входом второго сумматора.
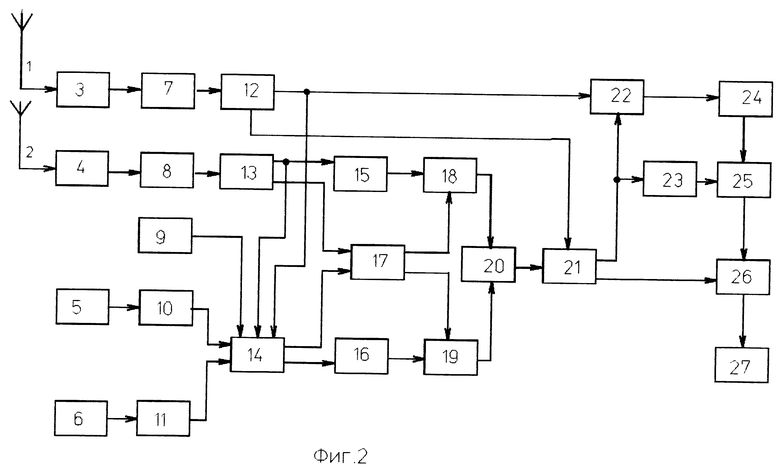
Функциональная схема предлагаемого устройства представлена на фиг.2, где приняты следующие обозначения:
1,2 - антенны;
3,4 - приемники;
5 - датчик пути;
6 - датчик курса;
7,8,10,11 - аналого-цифровые преобразователи (AЦП);
9 - пульт управления;
12,13,14 - вычислители координат;
15,16,24 - цифровые фильтры;
17 - вычислитель весовых коэффициентов;
18,19 - перемножители;
20,25 - сумматоры;
21 - коммутатор;
22 - вычитатель;
23 - элемент задержки;
26 - элемент ИЛИ;
27 - индикатор.
Предлагаемое устройство содержит: последовательно соединенные антенну 1, приемник 3, АЦП7, вычислитель координат 12, вычитатель 22, цифровой фильтр 24, сумматор 25, элемент ИЛИ 26 и индикатор 27, последовательно включенные антенну 2, приемник 4, AЦП8, вычислитель координат 13, цифровой фильтр 15, перемножитель 18, сумматор 20, коммутатор 21 и элемент задержки 23, выход которого соединен со вторым входом сумматора 25, последовательно соединенные датчик пути 5, АЦП10, вычислитель координат 14, цифровой фильтр 16 и перемножитель 19, выход которого подключен ко второму входу сумматора 20, последовательно соединенные датчик курса 6 и АЦП11, выход которого подключен ко второму входу вычислителя координат 14, пульт управления 9 и вычислитель весовых коэффициентов 17, при этом вторые выходы вычислителей координат 13,14 соединены соответственно с первым и вторым входами вычислителя весовых коэффициентов 17, первый и второй выходы которого подключены ко вторым входам соответственно перемножителей 18,19, третий вход вычислителя координат 14 соединен с первым выходом вычислителя координат 12, первый выход вычислителя координат 13 подключен к четвертому входу вычислителя координат 14, пятый вход которого соединен с выходом пульта управления 9, второй выход вычислителя координат 12 подключен ко второму входу коммутатора 21, второй выход которого соединен со вторым входом элемента ИЛИ 26, второй вход вычитателя 22 подключен к первому выходу коммутатора 21.
Предлагаемое устройство работает следующим образом. Приемник 3 с помощью антенны 1 осуществляет прием радиосигналов от наземных опорных станций систем дальней навигации (например, "Лоран-С"). Аналогично, приемник 4 с помощью антенны 2 производит прием радиосигналов спутниковой навигации (например, GPS). Принятые радиосигналы поступают с приемников 3,4 соответственно на AЦП7,8, где преобразуются из аналоговой формы в цифровую и далее на соответствующие вычислители координат 12,13. Вычислители координат 12,13, представляющие собой процессоры, производят вычисление текущих географических координат объекта, при этом на их выходах получаются соответственно координаты на основе радиосигналов дальней и спутниковой навигации. Кроме того, установленные на объекте датчики 5,6 пути и курса вырабатывают сигналы приращения пути и курса при движении объекта, которые преобразуются с помощью соответственно АЦП10,11 из аналоговой в цифровую форму и поступают на вычислитель координат 14. Вычислитель координат 14, представляющий процессор, производит вычисление по сигналам с АЦП10,11 полярных координат объекта, которые затем пересчитываются в географические. Пересчет осуществляется вычислителем координат 14 с помощью сигналов с вычислителей координат 12,13 или пульта управления 9, несущих информацию о географических координатах объекта (задают начальные координаты подвижного объекта, т.е. точку отсчета). При этом, сам выбор географических координат с того или иного блока производится вычислителем координат 14 в порядке их приоритета. Кроме того, вычислители координат 13,14 осуществляют еще вычисление среднеквадратической ошибки (СКО) в определении географических координат (отклонение их от среднего значения), информация о которой подается на вычислитель весовых коэффициентов 17. Вычислитель весовых коэффициентов 17, представляющий собой процессор, вычисляет на основе этой информации весовые коэффициенты, которые обратно пропорциональны СКО.
Сигналы географических координат подаются с вычислителей координат 13,14 на соответствующие цифровые фильтры 15,16, в которых осуществляется их фильтрация, а затем соответственно на перемножители 18,19. Здесь производится перемножение их с соответствующими весовыми коэффициентами, поступающими с выходов вычислителя весовых коэффициентов 17 и далее, после перемножения сигналы складываются на сумматоре 20. Таким образом, на выходе сумматора 20 получается оптимальная совместная оценка географических координат на основе данных от спутниковой и автономной навигационных систем, которая подается на коммутатор 21. Коммутатор 21 управляется сигналом, поступающим с вычислителя координат 12, который формирует этот сигнал в зависимости от результатов анализа сигнала с приемника 3: если сигнал есть, то информация с сумматора 20 подается через коммутатор 21 на 22,23 для дальнейшей совместной обработки с сигналом от навигационных систем, а если сигнала нет, то напрямую через элемент ИЛИ 26 на индикатор 27.
В случае, если сигнал от наземных навигационных систем есть, то дальнейшая работа предлагаемого устройства производится следующим образом. Сигнал географических координат с вычислителя координат 12 поступает на вычитатель 22, где производится вычитание его с сигналом оптимальных географических координат, подающимся на второй вход с сумматора 20 через коммутатор 21. Результат вычитания фильтруется затем цифровым фильтром 24 и поступает на сумматор 25. На второй вход сумматора 25 подается через элемент задержки 23, необходимый для выравнивания сигналов по времени, информация об оптимальных географических координатах с коммутатора 21. Сумматор 25 складывает сигналы и на его выходе формируется, таким образом, сигнал другой оптимальной оценки географических координат, полученных на основе наземной, спутниковой и автономной навигационных систем. Этот сигнал подается затем с сумматора 25, через элемент ИЛИ 26, на индикатор 27 для визуального отображения.
Предлагаемое устройство реализуется физически на базе элементов и блоков, широко известных из технической литературы.
Техническая эффективность предлагаемого устройства, в сравнении с прототипом, заключается в более высокой точности определения координат объекта. Это можно показать на следующем примере.
В прототипе СКО в определении координат объекта составляет (кн. Кинкулькин И. Е. и др. Фазовый метод определений координат. М., "Сов.радио", 1979 г. , кн.Шебшаевич B.C. и др. Сетевые спутниковые радионавигационные системы. М., "Радио и связь", 1982 г.):
а) для наземной навигационной системы
σ1 = (200 - 600) м
б) для спутниковой навигационной системы
σ2 = 50 м
В предлагаемом устройстве СКО в определении координат объекта описывается формулой (кн.Э.Сейдж, Дж.Мелс. Теория оценивания и ее применение в связи и управлении. М., "Связь", 1976 г., 6.5 "Точность оценок и априорная информация", стр.208-231):
где σ1, σ2, σ3 - СКО в определении координат объекта наземной, спутниковой и автономной навигационными системами соответственно;
T1, T2, T3 - время корреляции ошибок соответственно наземной, спутниковой и автономной навигационных систем,
Tф - постоянная времени фильтров, реализующих оптимальную совместную обработку координат.
При исходных данных: σ1 = 600 м; σ2 = 50 м; σ3 = 1000 м; T1 = 12 ч; T2 = 2 ч; T3 = 2 ч; TФ = 24 ч величина СКО в предлагаемом устройстве будет равна:
Тогда выигрыш в точности предлагаемого устройства в сравнении с прототипом составит:
а) по отношению к наземной навигационной системе
б) по отношению к спутниковой навигационной системе: е
е
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО КОНТРОЛЯ МАРШРУТА АВТОМОБИЛЯ | 2001 |
|
RU2194308C1 |
| Устройство пространственной селекции сигналов с компенсацией преднамеренных помех | 2018 |
|
RU2677931C1 |
| СИСТЕМА ВЫСОКОТОЧНОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ-ПОТРЕБИТЕЛЕЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ ПО НАВИГАЦИОННЫМ РАДИОСИГНАЛАМ С САНКЦИОНИРОВАННЫМ ДОСТУПОМ В РЕЖИМЕ ДИФФЕРЕНЦИАЛЬНЫХ ПОПРАВОК | 2000 |
|
RU2161317C1 |
| Устройство для пространственной селекции сигналов навигационных космических аппаратов с использованием пеленгования источников радиопомех | 2016 |
|
RU2619800C1 |
| Пространственно-распределенная система радиопомех на беспилотных летательных аппаратах | 2023 |
|
RU2807312C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2013 |
|
RU2544006C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2013 |
|
RU2544007C2 |
| СПОСОБ И СИСТЕМА РАДИОСВЯЗИ | 2017 |
|
RU2682715C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2013 |
|
RU2535923C1 |
| Спутниковая инерциальная навигационная система для станций спутниковой связи | 2024 |
|
RU2836126C1 |
Устройство относится к измерительной технике и может быть использовано для определения местоположения подвижных объектов. Известный измеритель координат, содержащий две антенны, два приемника, аналого-цифровой преобразователь, вычислитель координат, коммутатор и индикатор, при этом первая и вторая антенны подключены ко входам соответственно первого и второго приемников, выход аналого-цифрового преобразователя соединен со входом вычислителя координат, обладает низкой точностью определения координат объекта. Введение в известное устройство дополнительно трех аналого-цифровых преобразователей, двух вычислителей координат, трех цифровых фильтров, двух сумматоров, двух перемножителей, вычитателя, элемента задержки, элемента ИЛИ, вычислителя весовых коэффициентов, датчика пути, датчика курса и пульта управления позволяет повысить точность определения координат объекта в среднем в 16 раз. Это обеспечивается за счет оптимальной оценки координат на основе наземной, спутниковой и автономной навигационных систем, что и является достигаемым техническим результатом. 2 ил.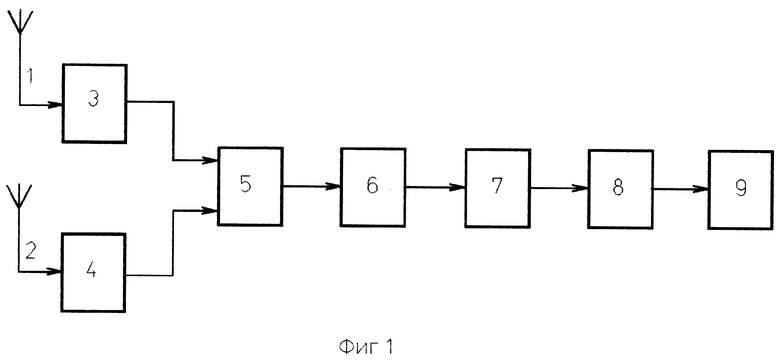
Измеритель координат, содержащий две антенны, два приемника, аналого-цифровой преобразователь, вычислитель координат, коммутатор и индикатор, при этом первая и вторая антенны подключены ко входам соответственно первого и второго приемников, выход аналого-цифрового преобразователя соединен со входом вычислителя координат, отличающийся тем, что в устройство дополнительно введены последовательно соединенные второй аналого-цифровой преобразователь, второй вычислитель координат, первый цифровой фильтр, первый перемножитель, первый сумматор, выход которого подключен к первому входу коммутатора, последовательно соединенные датчик пути, третий аналого-цифровой преобразователь, третий вычислитель координат, второй цифровой фильтр, второй перемножитель, выход которого подключен ко второму входу первого сумматора, последовательно соединенные вычитатель, третий цифровой фильтр, второй сумматор, элемент ИЛИ, выход которого подключен ко входу индикатора, последовательно соединенные датчик курса и четвертый аналого-цифровой преобразователь, выход которого подключен ко второму входу третьего вычислителя координат, вычислитель весовых коэффициентов, элемент задержки и пульт управления, при этом выходы первого и второго приемников подключены ко входам соответственно первого и второго аналого-цифровых преобразователей, вторые выходы второго и третьего вычислителей координат соединены соответственно с первым и вторым входами вычислителя весовых коэффициентов, первый и второй выходы которого подключены ко вторым входам соответственно первого и второго перемножителей, первый выход первого вычислителя координат соединен с первым входом вычитателя и третьим входом третьего вычислителя координат, четвертый вход которого подключен к первому выходу второго вычислителя координат, выход пульпа управления соединен с пятым входом третьего вычислителя координат, второй выход первого вычислителя координат подключен ко второму входу коммутатора, первый выход которого соединен со вторым входом вычитателя и входом элемента задержки, второй выход коммутатора подключен ко второму входу элемента ИЛИ, выход элемента задержки соединен со вторым входом второго сумматора.
| СОВМЕЩЕННЫЙ ПРИЕМОИНДИКАТОР | |||
| Труды международного форума по радионавигации с использованием РНС "ЛОРАН-С" | |||
| - Англия, Бирмингем, 1992, стр.339, рис.5 | |||
| СПОСОБ ГРУППОВОЙ НАВИГАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1997 |
|
RU2130622C1 |
| US 5621646 A, 15.04.1997 | |||
| Огнетушитель | 0 |
|
SU91A1 |
