Изобретение относится к навигационной технике, а именно к способам бесплатформенной инерциальной навигации, комплексированной со спутниковой навигацией, и может быть использовано для управления ориентацией приемо-передающих антенн, с целью обеспечения стабильного непрерывного канала связи.
Из уровня техники известна комплексированная бесплатформенная инерциально-спутниковая система навигации на "грубых" чувствительных элементах, содержащая блок ЧЭ из трех акселерометров и трех датчиков угловых скоростей по трем ортогональным осям, приемник спутниковой навигационной системы (СНС), блок определения качества измерений СНС, блок измерения (или определения) параметров движения носителя, несколько (преимущественно три) вычислительных платформ и мастер-фильтр. Эта система описана в патенте RU 2380656 C1 (опубл. 27.10.2010).
Основными недостатками данной системы является использование одного приемника СНС, что не позволяет быстро и эффективно определять ориентацию системы в статичном состоянии, а также избыточное использование нескольких вычислительных платформ.
Наиболее близким к технической сущности предлагаемого технического решения является бесплатформенная интегрированная навигационная система средней точности для мобильного наземного объекта, содержащая блок чувствительных элементов (ЧЭ), состоящий из трех одноосных акселерометров и трех одноосных датчиков угловой скорости по трем ортогональным осям, блок пересчета ускорений из связанной в навигационную систему координат, блок вычисления линейных и угловых скоростей и географических координат, блок формирования сигналов демпфирования, первый и второй блоки кватернионных вычислений, блок вычисления матрицы направляющих косинусов и углов ориентации системы, приемник сигналов спутниковой навигационной системы (СНС), блок определения качества сигнала СНС, коммутатор векторных сигналов, первый и второй сумматоры-вычитатели векторных сигналов, блок коррекции угла курса, а также дрейфа курсового гироскопа, блок стоп-детектора, блок одометрической системы. Эта система описана в патенте RU 2539131 С1 (опубл. 10.01.2015).
Основными недостатками данной системы является использование в своем составе одометрической системы, требующей интеграции в механизмы подвижной платформы. Также в системе используется один приемник СНС, что не позволяет быстро и эффективно определять ориентацию системы в статичном состоянии.
Основной задачей заявляемого изобретения является создание спутниковой инерциальной навигационной системы для станций спутниковой связи, способной выдавать рассчитанный вектор ориентации и положение в пространстве, на основе которых возможно генерировать управляющие сигналы для подвижных антенн систем спутниковой связи, позволяющие устанавливать стабильный канал спутниковой связи и сохранять его работоспособность при движении системы связи в пространстве.
Для решения поставленной технической задачи предлагается спутниковая инерциальная навигационная система (СИНС) для станций спутниковой связи содержащая вычислитель, блок чувствительных элементов (ЧЭ) и приемник спутниковых навигационных сигналов (СНС), в которой вычислитель выполнен в виде микроконтроллера, блок ЧЭ содержит шесть одноосных датчиков угловой скорости (ДУС), два трехосных акселерометра и цифровой датчик температуры, а также в систему дополнительно включены второй приемник СНС и постоянное запоминающее устройство (ПЗУ), соединенное двунаправленной линией связи с вычислителем.
От прототипа заявляемая спутниковая инерциальная навигационная система для станций спутниковой связи (СИНС), отличается тем, что вычислитель выполнен в виде микроконтроллера, блок ЧЭ содержит два трехосных акселерометра, шесть одноосных датчиков угловой скорости (ДУС) и цифровой датчик температуры, а также в систему дополнительно включены второй приемник СНС и постоянное запоминающее устройство (ПЗУ), соединенное двунаправленной линией связи с вычислителем, при этом выходы сигналов угловых скоростей ДУС блока ЧЭ, выходы сигналов линейных ускорений акселерометров блока ЧЭ, выходы сигналов температуры цифрового датчика температуры блока ЧЭ, выходы сигналов пространственного положения и скорости СНС поступают на вычислитель, выход которого подключен к каналу связи с внешними устройствами.
Увеличение количества датчиков в составе блока ЧЭ обусловлено необходимостью измерять широкий диапазон значений угловой скорости и линейного ускорения с сохранением точности измерений на малых диапазонах. Таким образом, на каждую ортогональную ось устанавливается по две чувствительных оси соответствующих инерциальных датчиков. Также цифровой датчик температуры позволяет увеличить точность предсказаний систематических погрешностей датчиков, используя данные о температуре акселерометров и ДУС.
Введение второго приемника СНС обусловлено необходимостью обеспечивать быстрое и точное определение ориентации системы в статичном положении, а также для увеличения надежности спутниковой навигации.
ПЗУ используется для хранения калибровочных и иных данных, используемых в процессе вычислений, и увеличивающих точность и эффективность работы системы.
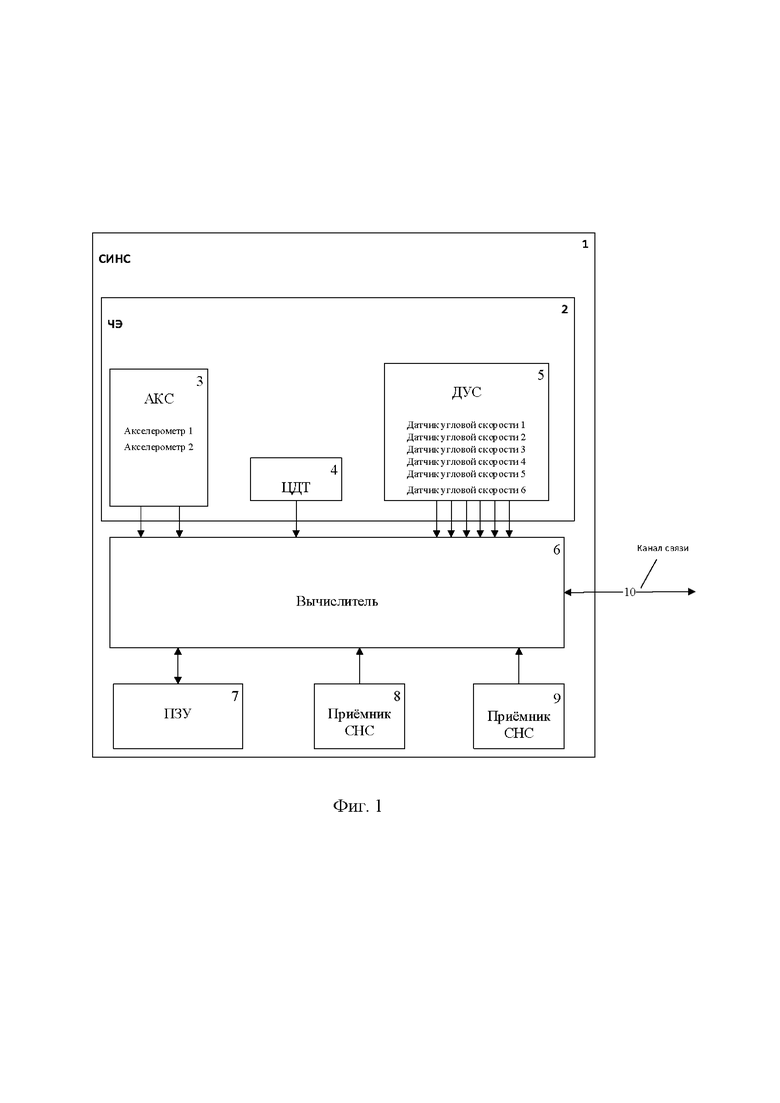
На фигуре представлена общая структурная схема спутниковой инерциальной навигационной системы для станций спутниковой связи (СИНС), где:
1 - спутниковая инерциальная навигационная система (СИНС);
2 - блок чувствительных элементов (ЧЭ);
3 - блок акселерометров (АКС);
4 - цифровой датчик температуры (ЦДТ);
5 - блок датчиков угловой скорости (ДУС);
6 - микроконтроллер, использующийся для выполнения требуемых для работы системы вычислений (Вычислитель);
7 - постоянное запоминающее устройство (ПЗУ);
8, 9 - приемник сигналов спутниковой навигационной системы (СНС);
10 - канал связи для подключения к внешним устройствам.
СИНС (1) выполнена в виде одной печатной платы с установленными на ней электронными компонентами. Вычислитель (6) представляет собой микроконтроллер с необходимыми для его работы компонентами. Датчики угловой скорости (ДУС) (5) представляют собой микроэлектромеханическую систему (МЭМС) и определяют угловые скорости вращения. Акселерометры (3) представляют собой микроэлектромеханическую систему (МЭМС) и определяют линейные ускорения. Цифровой датчик температуры (4) предназначен для определения температуры как отдельных акселерометров и ДУС (5), так и всей СИНС (1) в целом.
После сборки СИНС (1) производится калибровка изделия, в процессе которой выясняются взаимные расположения всех датчиков, калибруются нули и абсолютные показания датчиков во всем рабочем диапазоне температур. Полученная калибровочная информация сохраняется в ПЗУ (7) СИНС (1) для последующего использования в процессе работы системы.
Вычислитель (6) принимает сформированные ЧЭ (2) данные о трех линейных ускорениях, трех угловых скоростях, и температуре, получаемых от АКС (3), ДУС (5) и ЦДТ (4) соответственно, и данные о скорости и позиции системы в пространстве от приемников сигналов СНС (8-9). Для получения инерциальных данных, линейного ускорения и угловой скорости, АКС (3) и ДУС (5) используют по два соответствующих датчика на каждую пространственную ось. В таком случае один датчик настроен так, чтобы иметь больший рабочий диапазон регистрируемых значений со сниженной точностью, в то время как второй датчик в паре настроен на меньший рабочий диапазон, но обладает большей точностью регистрируемых значений.
Используя сохраненные в ПЗУ (7) калибровочные данные и данные, получаемые от блока ЧЭ (2) и приемников сигналов СНС (8, 9), вычислитель (6) рассчитывает по установленным алгоритмам положение СИНС (1) в пространстве. После чего рассчитанное положение передается потребителю, подключенному к СИНС (1) через канал связи (10).
Заявляемое решение может быть реализовано с использованием приборов и устройств, используемых в данной области, и является промышленно применимым.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКСИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2008 |
|
RU2380656C1 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ, ОРИЕНТАЦИИ И СТАБИЛИЗАЦИИ | 2008 |
|
RU2375679C2 |
| ГИРОГОРИЗОНТКОМПАС С ВРАЩЕНИЕМ ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО БЛОКА | 2010 |
|
RU2436046C1 |
| БЕСПЛАТФОРМЕННАЯ ИНТЕГРИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА СРЕДНЕЙ ТОЧНОСТИ ДЛЯ МОБИЛЬНОГО НАЗЕМНОГО ОБЪЕКТА | 2013 |
|
RU2539131C1 |
| ИНТЕГРИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ СИСТЕМА НАВИГАЦИИ СРЕДНЕЙ ТОЧНОСТИ ДЛЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2539140C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ НАЗЕМНЫХ ОБЪЕКТОВ | 2015 |
|
RU2603821C2 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ О ПЕРЕМЕЩЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2436047C1 |
| Устройство для определения углов пространственной ориентации динамических и статических объектов | 2022 |
|
RU2795261C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ ОБЪЕКТОВ, ДВИЖУЩИХСЯ ПО БАЛЛИСТИЧЕСКОЙ ТРАЕКТОРИИ С ВРАЩЕНИЕМ ВОКРУГ ПРОДОЛЬНОЙ ОСИ | 2008 |
|
RU2375680C1 |
| Инерциальный измерительный преобразователь | 2024 |
|
RU2821240C1 |
Изобретение относится к навигационной технике, а именно к способам бесплатформенной инерциальной навигации, комплексированной со спутниковой навигацией, и может быть использовано для управления ориентацией приёмо-передающих антенн с целью обеспечения стабильного непрерывного канала связи. Спутниковая инерциальная навигационная система для станций спутниковой связи содержит вычислитель, блок чувствительных элементов (ЧЭ) и приёмник спутниковых навигационных сигналов (СНС). Дополнительно вычислитель выполнен в виде микроконтроллера, блок ЧЭ содержит два трёхосных акселерометра, шесть одноосных датчиков угловой скорости (ДУС) и цифровой датчик температуры. Также в систему дополнительно включены второй приёмник СНС и постоянное запоминающее устройство (ПЗУ), соединённое двунаправленной линией связи с вычислителем. Технический результат – создание спутниковой инерциальной навигационной системы для станций спутниковой связи, способной выдавать рассчитанный вектор ориентации и положение в пространстве. 1 ил.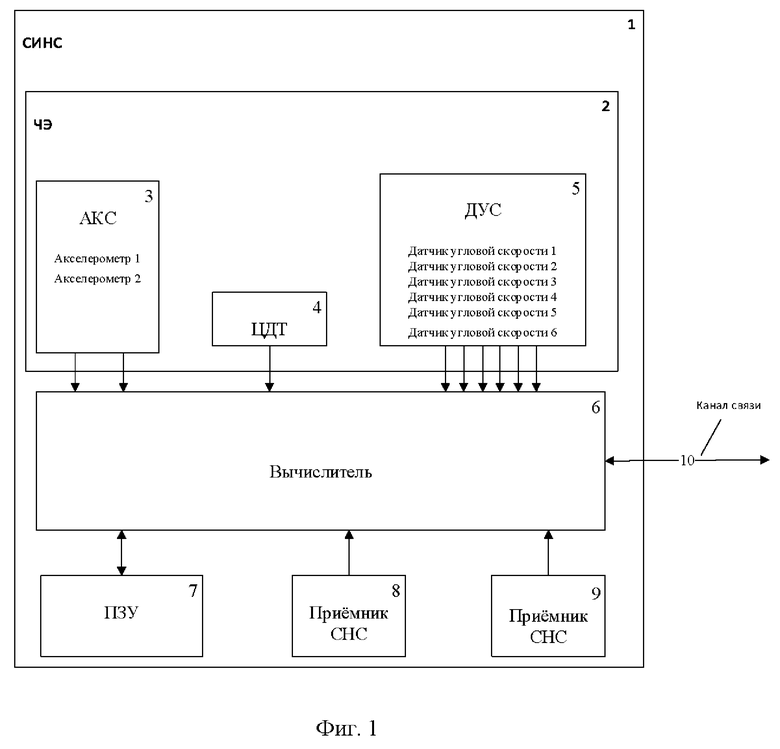
Спутниковая инерциальная навигационная система для станций спутниковой связи (СИНС), содержащая вычислитель, блок чувствительных элементов (ЧЭ) и приёмник спутниковых навигационных сигналов (СНС), отличающаяся тем, что вычислитель выполнен в виде микроконтроллера, блок ЧЭ содержит два трёхосных акселерометра, шесть одноосных датчиков угловой скорости (ДУС) и цифровой датчик температуры, а также в систему дополнительно включены второй приёмник СНС и постоянное запоминающее устройство (ПЗУ), соединённое двунаправленной линией связи с вычислителем, при этом выходы сигналов угловых скоростей ДУС блока ЧЭ, выходы сигналов линейных ускорений акселерометров блока ЧЭ, выходы сигналов температуры цифрового датчика температуры блока ЧЭ, выходы сигналов пространственного положения и скорости СНС поступают на вычислитель, выход которого подключен к каналу связи с внешними устройствами.
| БЕСПЛАТФОРМЕННАЯ ИНТЕГРИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА СРЕДНЕЙ ТОЧНОСТИ ДЛЯ МОБИЛЬНОГО НАЗЕМНОГО ОБЪЕКТА | 2013 |
|
RU2539131C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ | 2011 |
|
RU2462690C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2277696C2 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| CN 102589352 A, 18.07.2012 | |||
| US 9014975 B2, 21.04.2015. | |||

